
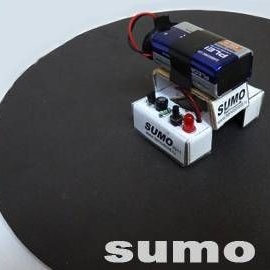

Vídeo de treball robot
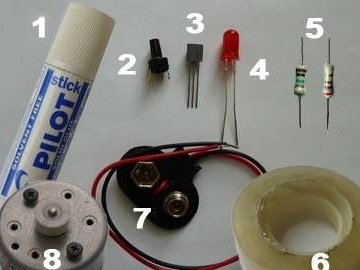
Materials i eines per crear un robot:
- pal de cola sec;
- cinta transparent;
- botó no fixat de dos pins;
- un LED intermitent tipus ARL-513URC-B;
- transistor tipus KP505A;
- dues resistències amb un valor nominal d’1M i 270 Ohms;
- connector per a pinces per a la connexió a una bateria del tipus "Corona";
- model de motor RF-300CA-D / C 3V o similar.

Funcionalitat i característiques del robot:
A la foto podeu veure ja muntada el robot. Per moure el dispositiu, només s’utilitza un motor, s’instal·la verticalment, però a un cert angle. Quan es mou en un segment curt, el robot es mou en línia recta i fa un arc en secció més llarga.
S'utilitza un botó per engegar el robot; quan es prem, el robot s'encén durant 20 segons. Després d'això, es produeix una parada automàtica i el robot es troba en mode d'espera fins a la següent activació.
Una altra característica del robot és que s’atura automàticament a la vora de l’anell. El compliment d'aquesta condició és possible si el pes del rival no serà inferior al pes del robot i el gruix de l'anell no serà inferior a 3 mm.
Aquí s’utilitza una bateria de 9 volts com a font d’energia, que es munta a la part superior del robot. Gràcies al pes addicional, el robot acumula l’energia cinètica necessària per a les accions necessàries.
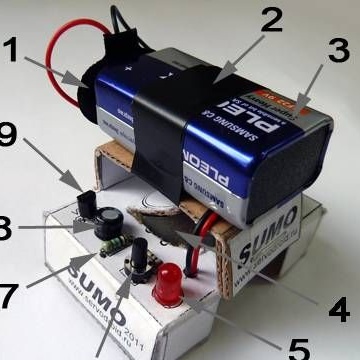
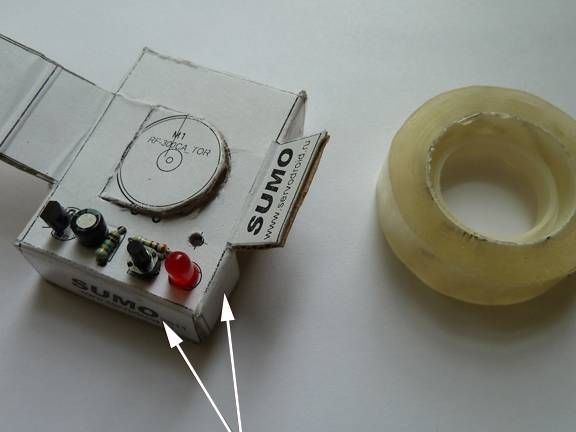
A la imatge, els components del robot estan marcats amb nombres:
1. Clip per connectar la bateria.
2. Pany de la bateria.
3. Alimentació (bateria de 9 V).
4. El motor.
5. LED intermitent (indica que l’alimentació està connectada).
6. Botó per engegar el robot.
7. Resistiu, gràcies a ella podeu definir l’hora del robot.
8. Condensador, també és el responsable del temps del robot.
9. Transistor tipus KP505A, és conductor.
Procés de muntatge del robot:
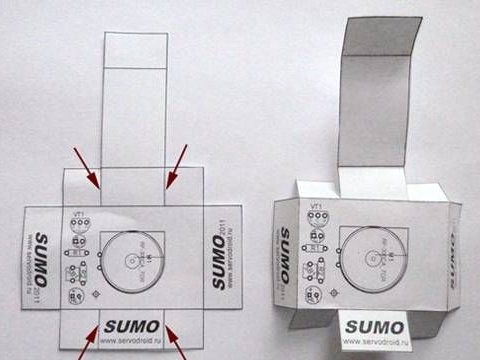
Primer pas. Fem el cas
Per fer el cas, l’autor utilitza cartró ondulat, cal aplicar-li un contorn segons la plantilla. La plantilla es pot imprimir en una impressora, s’adjunta a l’article. A més, una vegada realitzats els plecs necessaris, el patró es pot tallar seguint línies gruixudes. Per instal·lar el motor, heu de tallar un semicercle al cartró i, després, doblegar-lo una mica, tal com s’indica a la foto.


Pas Segon Instal·lació d’elements de ràdio
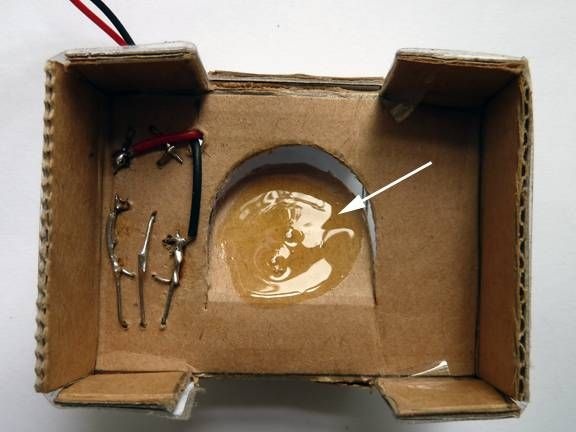
En la següent etapa, cal instal·lar tots els elements de ràdio necessaris. Per fer-ho, heu de fer un penell i fer forats al cartró, han de fer-se amb marques rodones. Per arreglar els components, després de la instal·lació, cal que doblegueu les seves conclusions. També podeu veure la marca en forma de vista a la cartolina, aquí heu de fer un forat gran, hi passarà un fil elèctric.
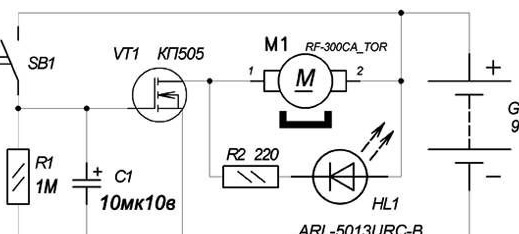
Després d'això, podeu agafar una soldadura i començar a connectar els contactes dels elements de ràdio d'acord amb l'esquema.





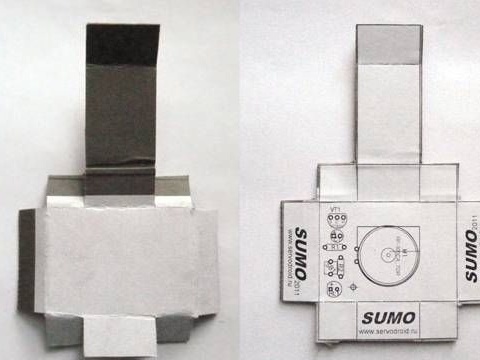
Tercer Pas Fixem les superfícies laterals inferiors
En aquesta fase es poden unir les superfícies laterals inferiors. Per fer-ho, heu de doblegar els plànols inferiors i després arreglar-los amb cinta transparent. A la imatge també es poden veure inclinats els elements del estoig, són necessaris per arreglar la bateria.


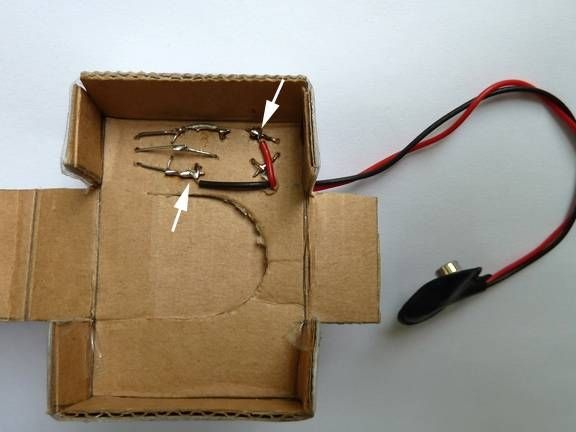
Quatre pas Connecta els perifèrics
Per connectar l’energia a la bateria, heu d’utilitzar un connector de clip. El cable ha de passar pel forat, el vermell es solda al contacte positiu del LED i el negre al menys del condensador C1.
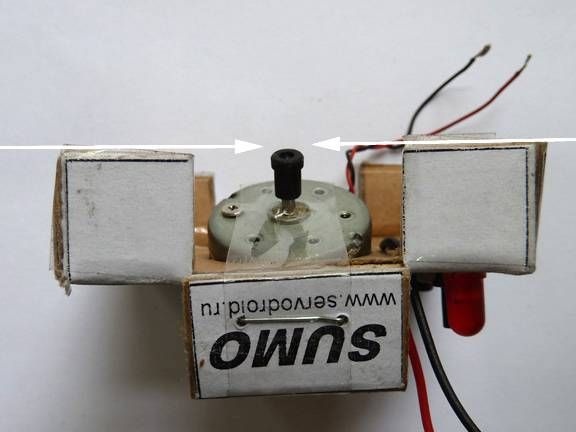
Aleshores, heu de connectar les superfícies laterals esquerra i dreta, per la qual cosa s'haurà d'obtenir la lletra "P". Per a una fixació fiable dels elements, s'utilitza un suport de grapa. On instal·lar els claudàtors s’indica amb una fletxa blanca. Les pinces es poden subjectar amb unes alicates.


Cinquè pas Instal·leu i connecteu el motor
Perquè el robot es mogui recte, el seu eix ha d’estar a un cert angle amb la superfície. Dit d'una altra manera, el robot es mantindrà a les parts laterals i el seu eix només estarà en contacte amb la superfície. Per tal que l’eix del robot tingui una bona adherència, cal posar-hi una banda elàstica, pot ser un càmbric o un retenidor de goma d’un bolígraf d’heli.
El motor està muntat sobre cola, el lloc de la lubricació està marcat amb una fletxa blanca. Després d’aplicar la cola, cal esperar una mica perquè es faci viscosa, en cas contrari, la cola líquida pot entrar al motor i arruïnar-la.
Per a una fixació addicional, el motor s'embolica amb cinta adhesiva.


Pel que fa a l'angle del robot, tot això és clarament visible a les imatges. Després de la instal·lació, cal connectar el motor. Un dels pins està connectat a menys, i l’altre al desguàs del transistor VT1.


Pas sisè L’etapa final del muntatge
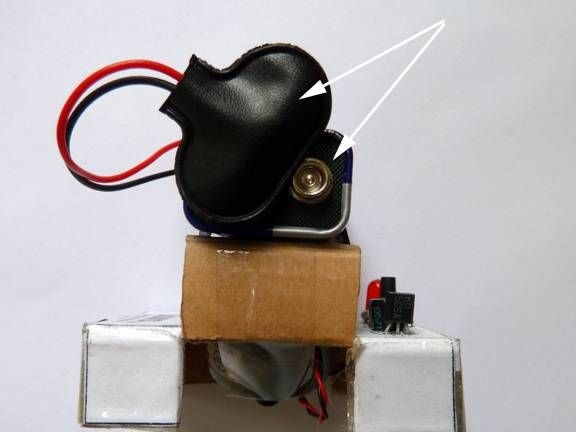
La bateria està muntada en un marc en forma d’U, la bateria es fixa mitjançant cinta elèctrica. El bastidor està pensat de tal manera que, a més del suport, també és un amortidor per a la bateria. Si el robot s’ha de desconnectar completament de la font d’energia, podeu desconnectar un fil de la bateria.
Bé, en conclusió, per a la competició necessitareu un anell, està fet de dues capes, amb un gruix mínim de 3 mm. Si no es compleix aquesta condició, el robot no podrà aturar-se a la vora de l’anell. El diàmetre de l’anell ha de ser de 250 mm. La capa inferior està formada per un cartró ondulat prim, i la superior de cartró prim i negre. Les dues capes han de ser unides entre si. El muntatge s’ha acabat, ja podeu iniciar la competició. El guanyador és el robot que queda al ring.