El divendres a la nit següent, l’autor va voler recollir alguna cosa interessant. Recordant això, va veure els projectes de dibuixar robots, i tenint un servo de rotació contínua, es va decidir muntar aquest robot. Es pot fer un servo de rotació contínua des de l’ordinari.
Materials:
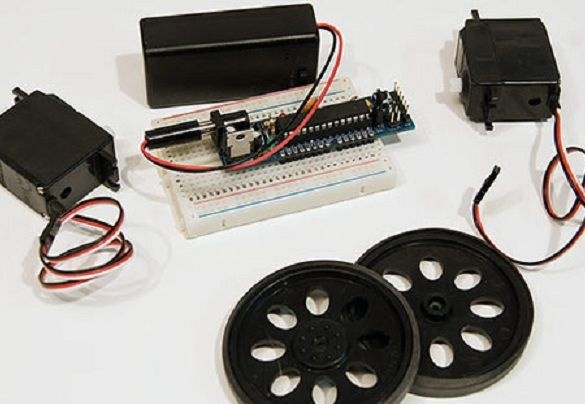
- DC Boarduino (es tracta d’un clon Arduino)
- Servo de rotació contínua de 2 peces
- Rodes servo 2 peces
- tauler de pa
- Conector de bateria de 9V amb connexió i commutador de 2,1 mm
- cables de connexió
No és necessari utilitzar Boarduino en aquest projecte, cap placa Arduino és suficient. L’autor va escollir aquest tauler per la seva mida. També necessitareu un cert nombre de retoladors, podeu adquirir un conjunt de colors diferents per a aquest robot.
A més, necessiteu una bateria de 9V i la base per al cos del robot de dibuix.
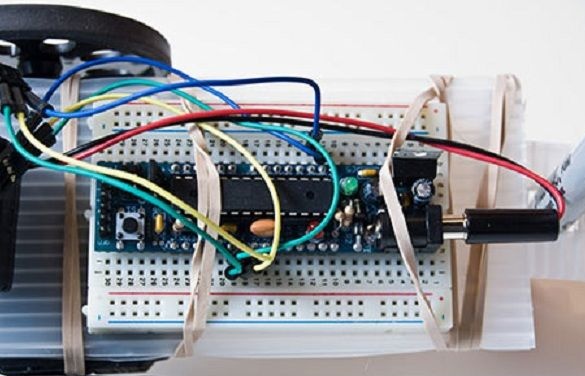
No hi ha res complicat en el muntatge del robot. En primer lloc, l’autor fixa les rodes amb dos servos amb cinta adhesiva i va mesurar la distància entre les rodes. Cal que l'amplada de la base sigui lleugerament inferior a la distància entre les rodes. L’autor utilitza plàstic corrugat, ja que és força lleuger i durador, i no és difícil treballar-hi. El seu ús, per descomptat, no és essencial, fins i tot es pot utilitzar cartró o plàstic a partir de estoigs per a discos.
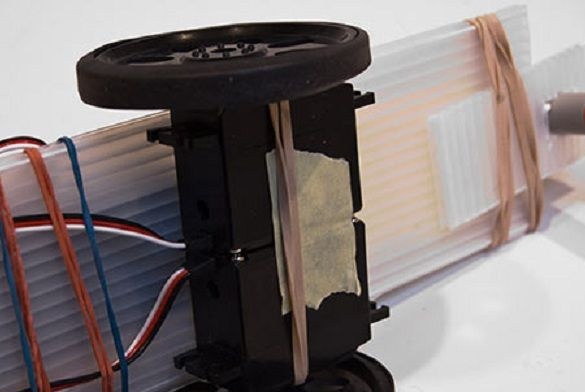
Els servomotors es connectaven a la base amb bandes de goma. A l’hora de col·locar la bateria i la placa de pa, van sorgir dificultats, ja que era necessari mantenir un equilibri. L’autor ha volgut fer més espai al costat amb el que es col·locava el marcador, però no ha volgut treure avantatge al costat oposat. Amb l'ajuda de bandes de goma, és força senzill ajustar la ubicació dels components, determinant l'òptim.
Durant tot el projecte s’utilitzen cables amb pins BLS per connectar-se a la placa base, també hi ha connectats servomotors.
Quan l’autor va acabar tots els treballs de muntatge del robot, va voler de seguida comprovar-ne el rendiment. Va trigar un temps a buscar el codi. Després d'haver topat amb un article sobre el control de servo de rotació contínua Parallax amb Arduino, es va adonar que anava per bon camí. El codi es va simplificar el màxim possible, de moment Drawbot només pot anar en cercles.Per descomptat, això és primitiu, però també és un bon començament i la base per al desenvolupament i la modernització. El codi es pot descarregar a l’article.
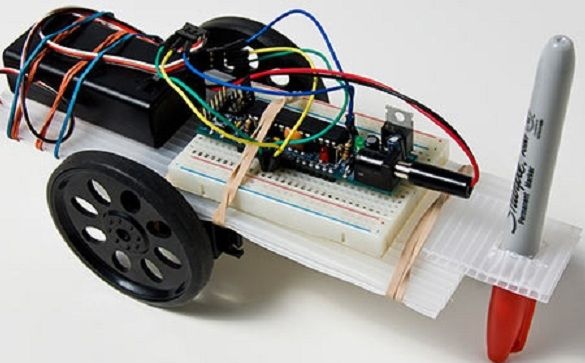
Ara l’autor ha rebut un robot que viatja en cercle. Continuant el treball, l’autor va agafar les restes de plàstic corrugat i li va fer un forat amb l’ajut d’un ganivet. El forat es va tallar amb un diàmetre lleugerament inferior al requerit, gràcies al forat reduït el marcador que hi havia era perfectament enganxat. Si utilitzeu cartró, aquest efecte no serà així i el marcador no es mantindrà bé ni caurà.

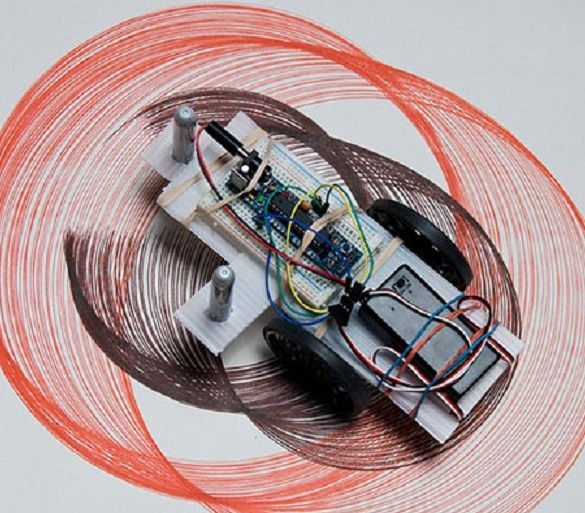
Després d’instal·lar el marcador, és hora de provar el robot. Posant-lo al centre del full de 24x18 i activant-lo, l’autor finalment va veure Drawbot en acció. Va començar a girar cercles dibuixant. Podem dir que l’autor va aconseguir crear un robot que creés una mena d’obra d’art.
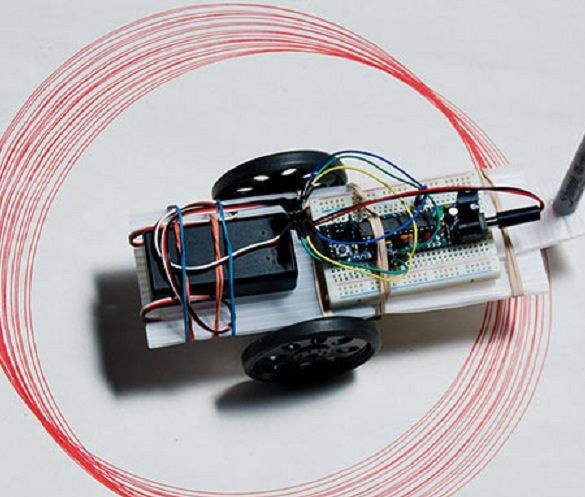
La imatge va sortir una mica incòmoda a causa del llençol que hi havia al terra, i no era gaire igualat i, molt probablement, els servos no giraven de forma sincrònica. Va resultar que un cercle podia ser més baix, el segon més alt i el següent encara una mica més alt o més baix. Probablement, en una ubicació ideal, tots els cercles estarien alineats en una línia. En aparença seria més bonic.
L’autor va pensar que el segon marcador podia il·luminar la situació i el robot farà imatges més interessants. El resultat va ser bo, els cercles van començar a intersectar-se entre ells. Serà més interessant veure com es comporta Drawbot en un full de paper gran.
En deixar anar el robot sobre una superfície de paper, l’autor pot obtenir un cercle o un munt de cercles. Però tenint un robot ja preparat, ja podeu pensar en millorar-lo canviant el codi.