

Tenint en estoc tots els detalls i eines d’aquest robot, podeu muntar en només 2 hores. Per descomptat, tal el robot No substituirà un aspirador real, però us sorprendrà gratament la quantitat de pols que pugui recollir d’un sòl aparentment net.
Materials:
- Arduino
- Mòdul de control del motor Protecció del motor (pont H)
- Dos motors amb engranatges
- Un parell de rodes
- Banc d’energia de 5 volts o una altra font d’energia
- Impulsor de refrigeració per a un ordinador de 5 volts (no és un ventilador)
- Imants forts
- Cable USB
- Cable d'alimentació per a Arduino
- Cables per connectar els pins Arduino
- Cartró gruixut
- pistola de cola
- Un tros de llauna (per exemple, d'una llauna)
- Caixa de plàstic (serveix com a contenidor de pols)

Al cartró es determina aproximadament la ubicació de les peces i es retalla un cercle de mida adequada (xassís de l’aspirador).
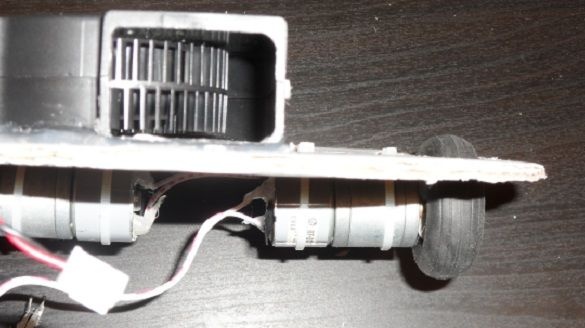
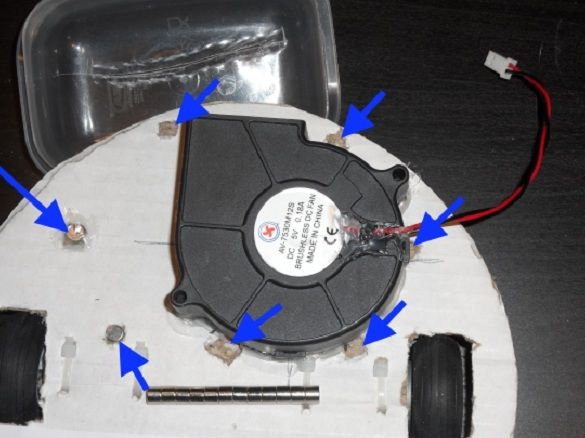
A la part inferior del futur robot, es tallen forats sota les rodes i a sota de la turbina. Els motors s’uneixen al cartró amb lligams de plàstic.

A més, es fixa una turbina al xassís amb adhesiu de fusió calenta.
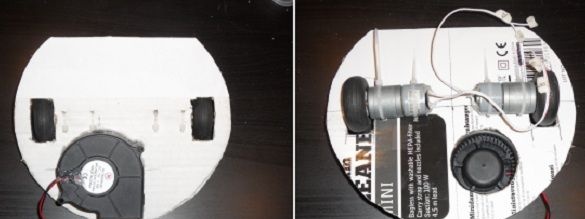
Resulta que la turbina es troba a la part superior del cartró, els motors estan a la part inferior.
El contorn de la caixa de plàstic (que recollirà pols) es marca a la part inferior, l’autor fa uns forats al voltant d’aquest contorn i nota la ubicació dels imants. Els imants aguantaran la caixa del xassís.
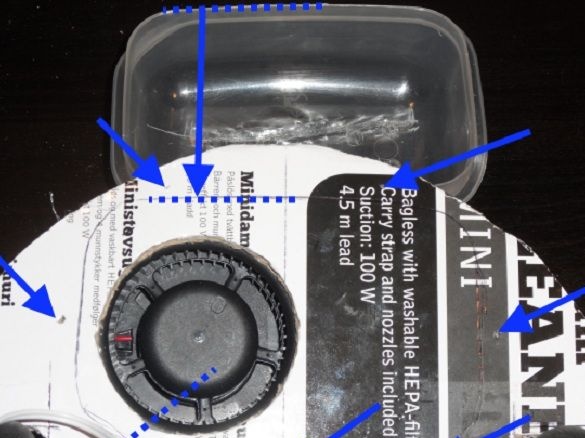
A la part superior del xassís, els imants estan enganxats a llocs marcats anteriorment.
Ara, amb imants aplicats des de la part inferior, poseu prèviament un full de paper a sota.

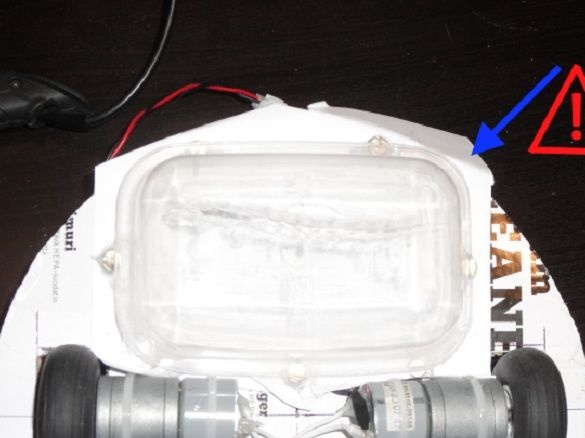
S'instal·la una caixa de pols entre els imants i s'enganxa a ells.
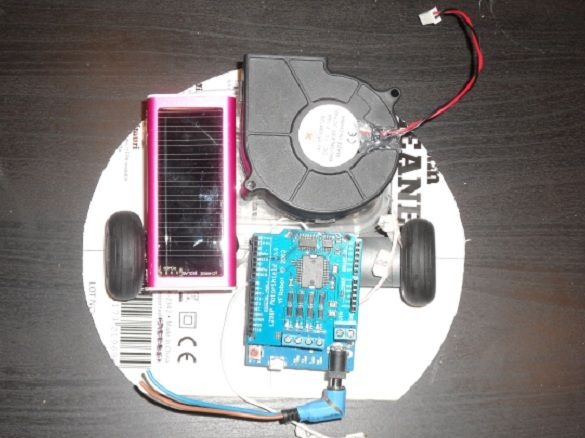
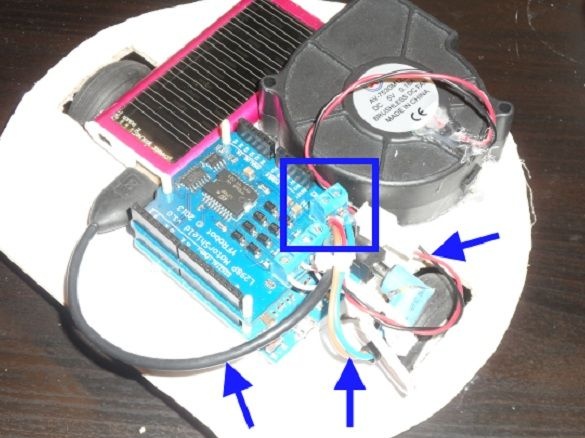
A més, la bateria i les muntures per a Arduino ja estan enganxades a la part superior del cartró. L’autor utilitza peces de broquetes de fusta com a fixadors.

Ara podeu instal·lar protector de motor i Arduino en muntatges. Els cables d'alimentació i Arduino es tallen a la mida. Es recomana soldar i aïllar els cables d'alimentació. A continuació, es connecten a l'Arduino, la turbina, la bateria i el blindatge del motor.
De les tires de cartró existents, els para-xocs estan doblegats i enganxats en un semicercle.

Els para-xocs estan enganxats als costats del xassís. A més, el xassís es va retallar prèviament una mica perquè els para-xocs instal·lats es poguessin aixafar fins a la col·lisió.

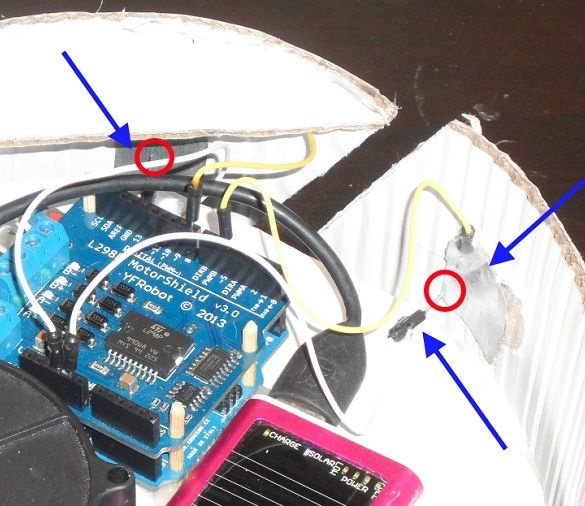
A continuació, agafeu dos conductors i connecteu-los amb trossos de llauna amb adhesiu de fusió calenta.
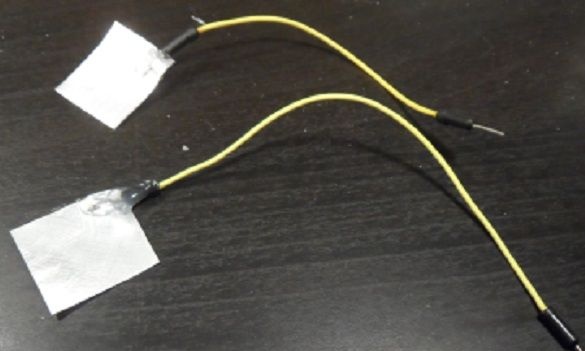
Les peces de llauna estan enganxades als para-xocs i els seus fils estan connectats a l'Arduino (als pins 5 i 8). A més, davant d’ells, la cola fixa els contactes de dos conductors més, que s’uneixen als contactes GND Arduino.
Com a filtre de pols s'utilitza un rectangle tallat d'un tovalló de cuina. El filtre es col·loca a la part inferior del xassís i es fixa amb una caixa d’imants.

A la caixa, feu un forat llarg amb les vores corbes cap a fora. També s’enganxa un suport rodó (peça de plàstic) a la caixa de manera que la vora del forat estigui a 1 mm per sobre del terra quan el robot es troba sobre rodes i es recolza sobre el suport. L’alçada d’aquest suport controla la patència del robot.

Les parets altes de la caixa es poden escurçar enganxant imants.

Programa per a blindatges de motor i Arduino
Exemple de funcionament de l’aspirador: