

Bon dia amants d’Arduino! A Internet, vaig veure un robot (o un aparell prou interessant i espectacular, anomeneu-ho com vulgueu) que "juga" al joc Stak, utilitzant els mateixos principis de funcionament, podeu fer un robot que pugui jugar a jocs com ara la geometria, el piano i altres on només necessiteu Introduir a la pantalla amb una seqüència determinada. Què he fet, avaluem a l'enquesta següent.
Si algú està interessat, aquí teniu un vídeo del treball d’aquest robot:
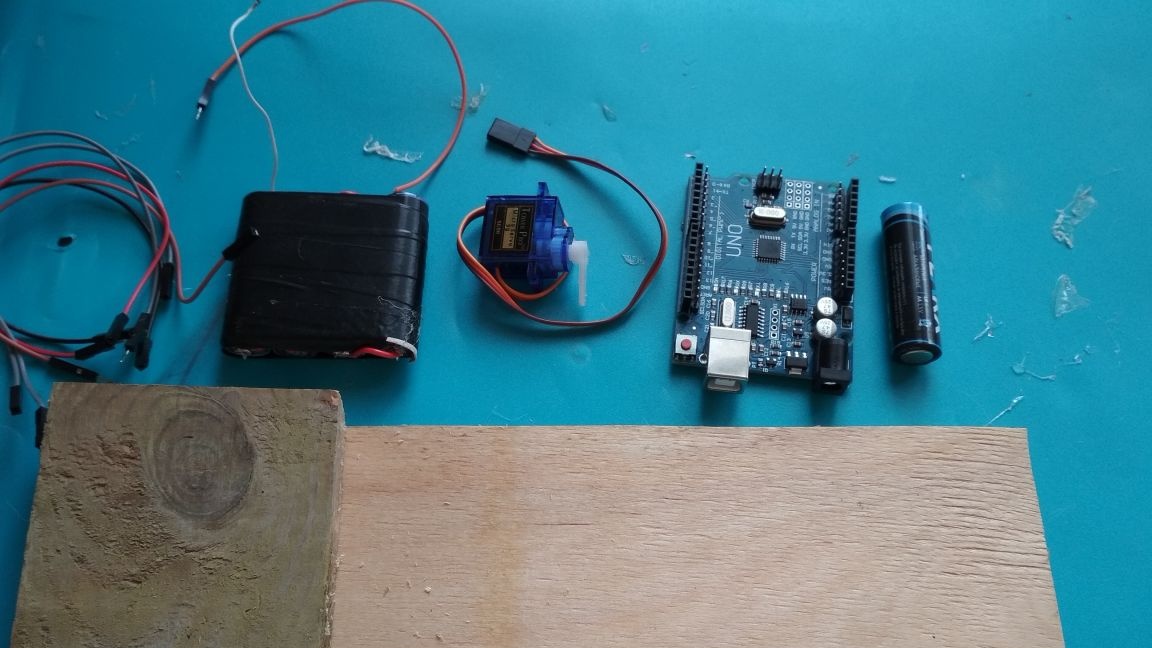
I per a aquest "robot" necessitem:
pagament Arduino Uno
- connexió de cables com "pare-mare" o "pare-pare"
-servici
- un tros de contraplacat
- un tauler d’uns 1 cm de gruix, el més important és que el doble sigui més gruixut que el contraplacat
pal de gelat
estil
Paper (si no hi ha cap estil)
-batre (si no hi ha estil)
- font d'alimentació per a 6-12 volts (faig servir 4 piles digitals connectades en sèrie)
De les eines que necessitem:
tisores
cola tèrmica
I, per tant, el primer que cal fer és tallar una peça dues vegades més gran que el telèfon d’un tros de fusta contraplacada, que pot ser més gran, i heu de tallar un tros de la mida del vostre telèfon des del tauler (jo vaig fer mides lleugerament diferents, però això no és crític en absolut). A continuació, colem els blancs com es mostra a la foto:

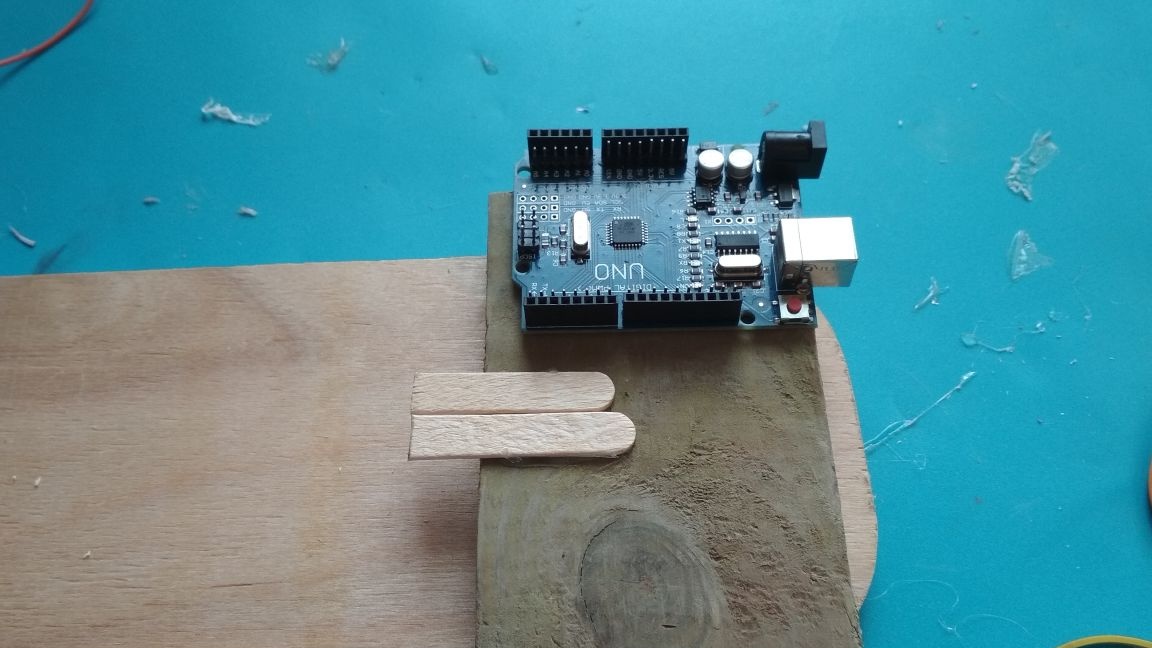
Agafeu el pal de gelat i talleu-lo a la meitat aproximadament:

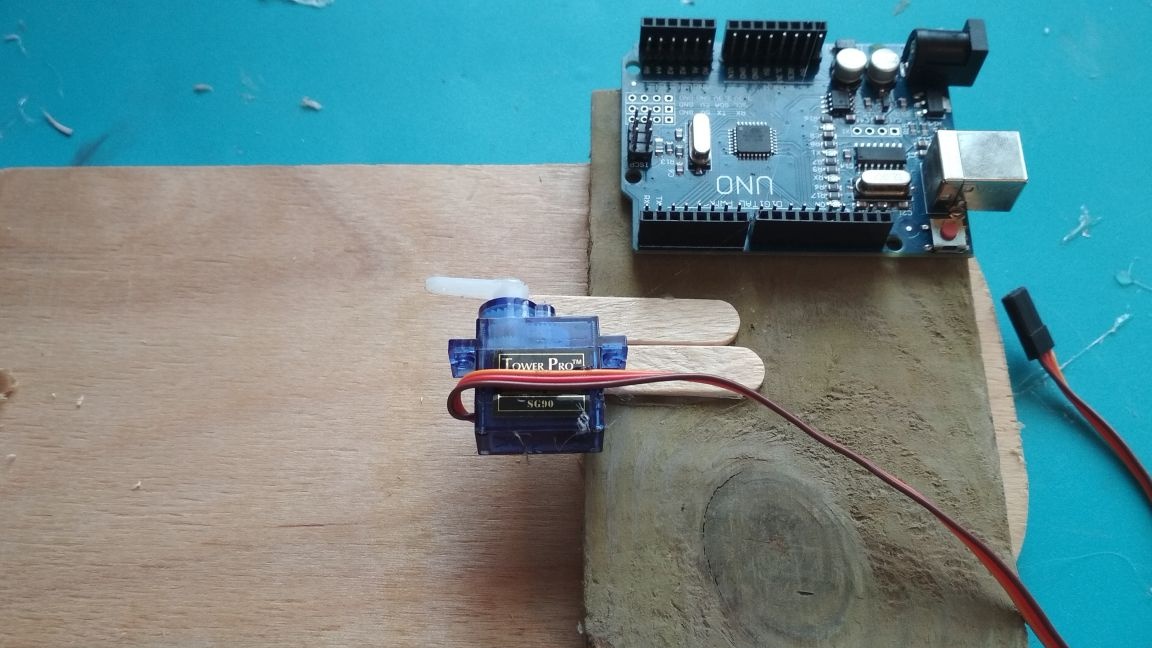
Colla-les al centre del tauler, des del costat de la fusta contraplacada, tal com es mostra a la foto:

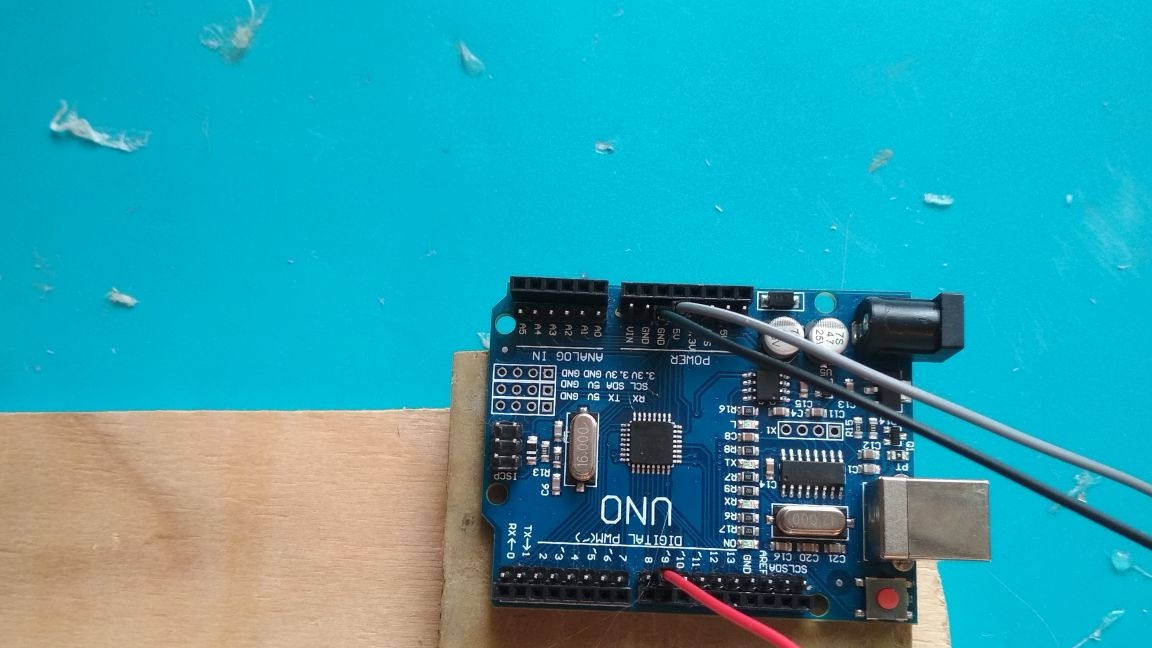
Colem el tauler Ardino Uno des de la vora del tauler:
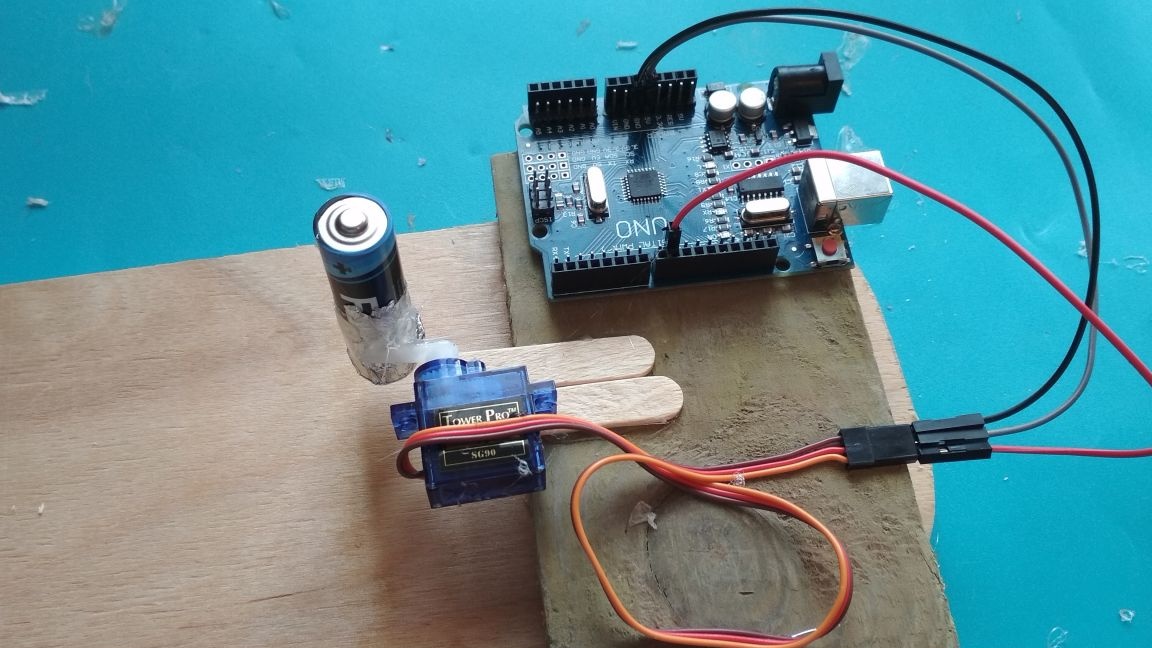
Agafem el servomotor i colem els fils perquè no interfereixin:
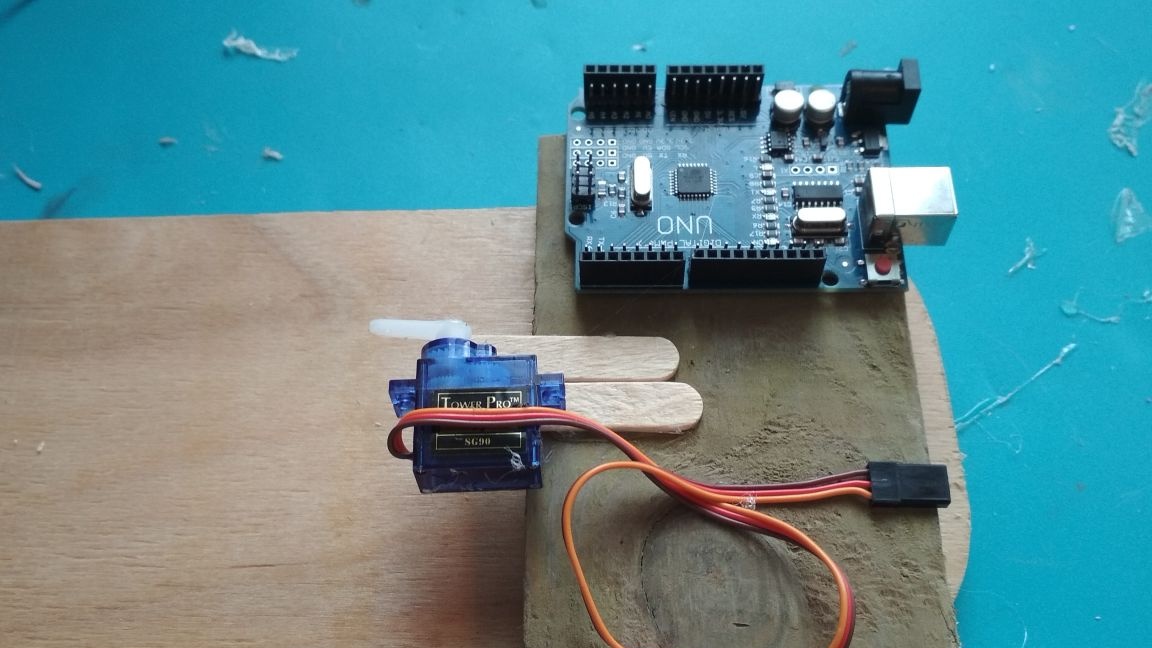
Colla el servomotor fins a l'extrem de les meitats dels pals de gelat:
Col·loquem els cables i enganxem la sortida del servomotor fins a la vora del tauler:
Afegiu 3 cables de pare-mare, preferiblement de diferents colors, per no confondre’s
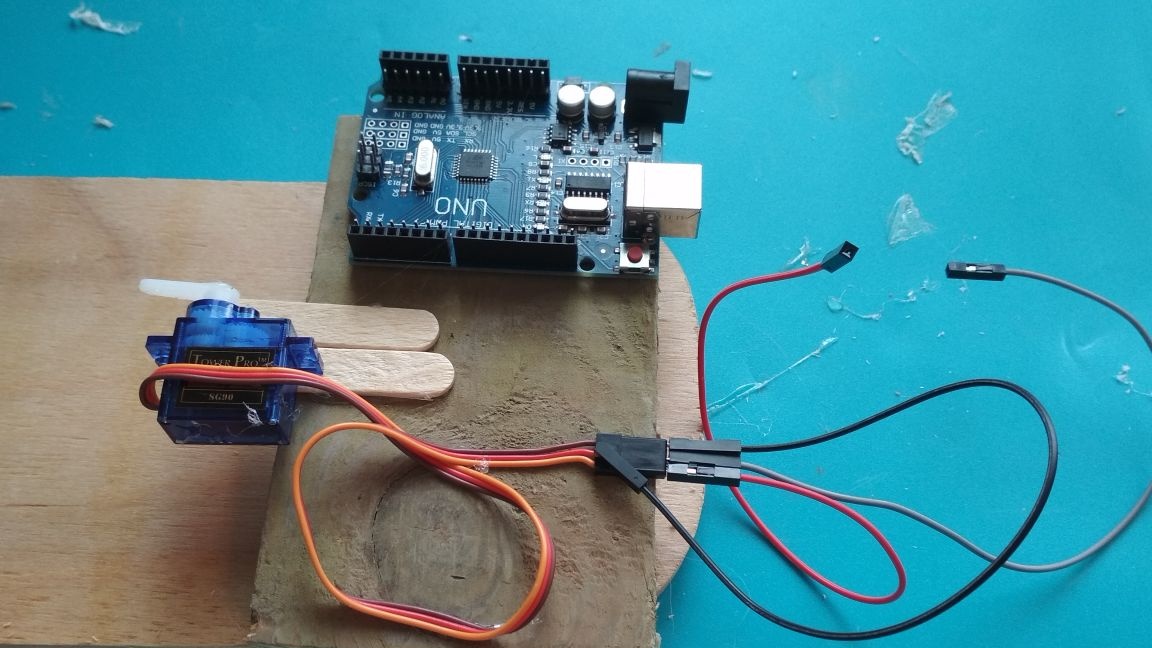
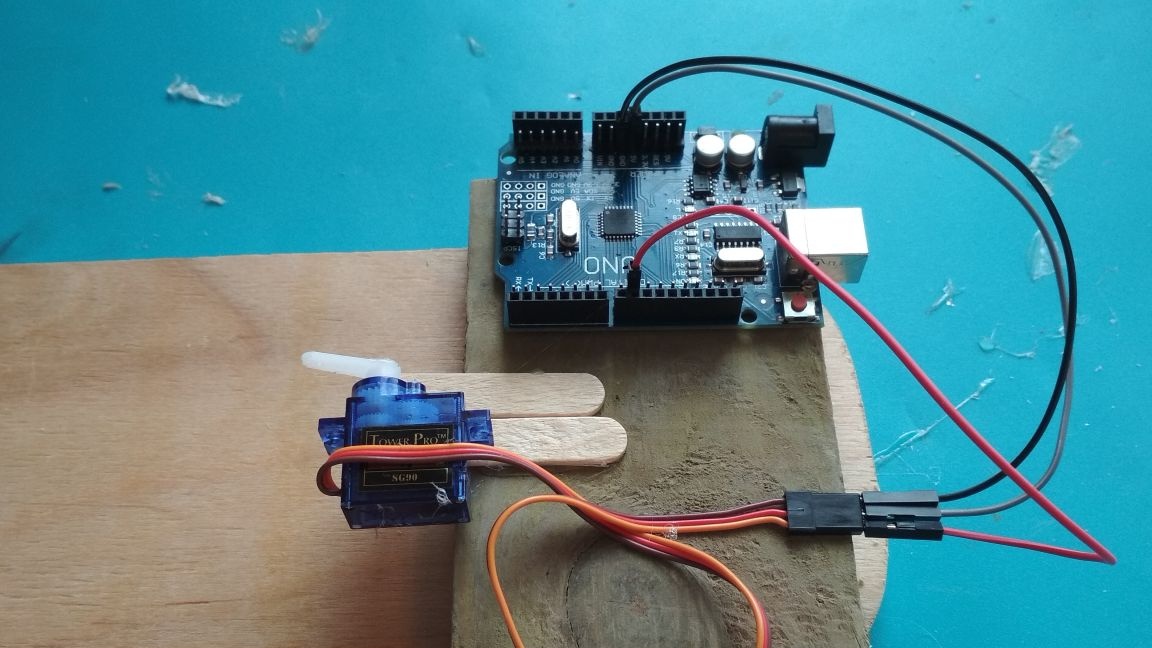
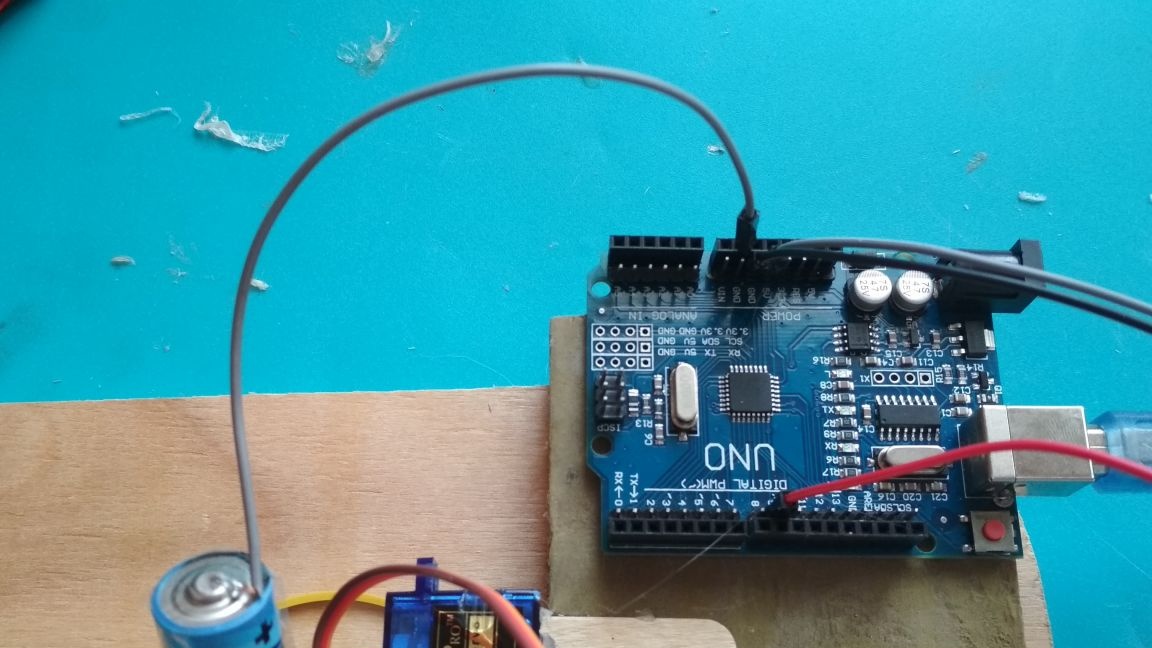
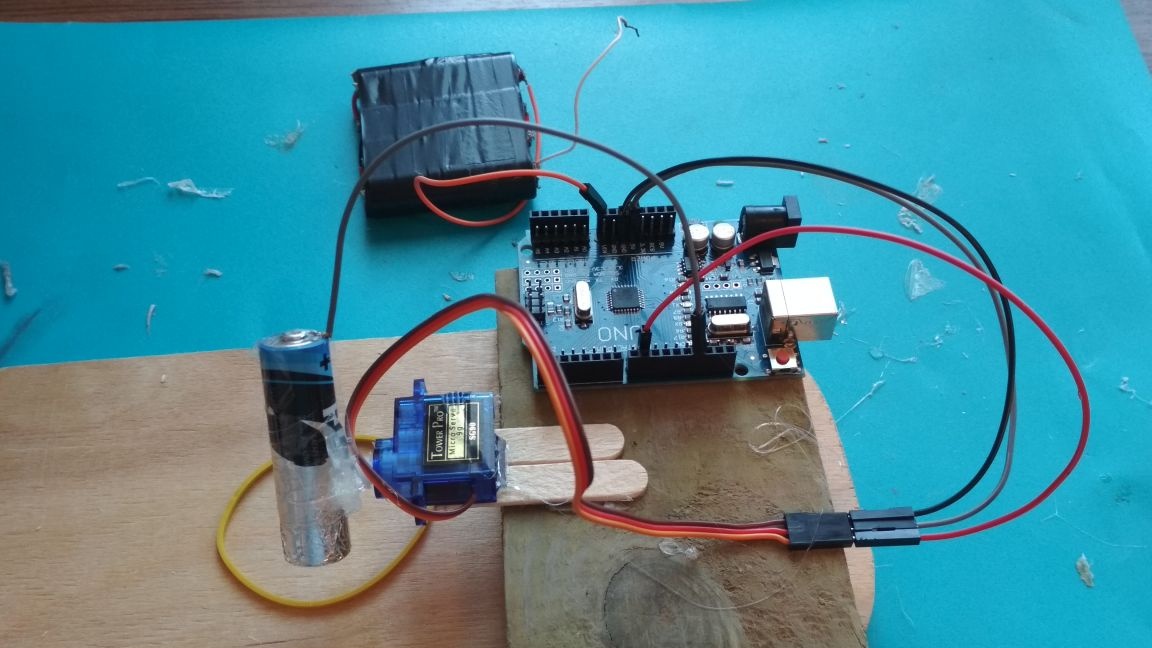
Connectem el servoaccionador a la placa Arduino de la següent manera:
fil marró a gnd
-Red filferro a 5v
- cable taronja a 9 "pin digital"
Si no teniu un estil, com el meu, aleshores no us desespereu, és molt senzill de fer.
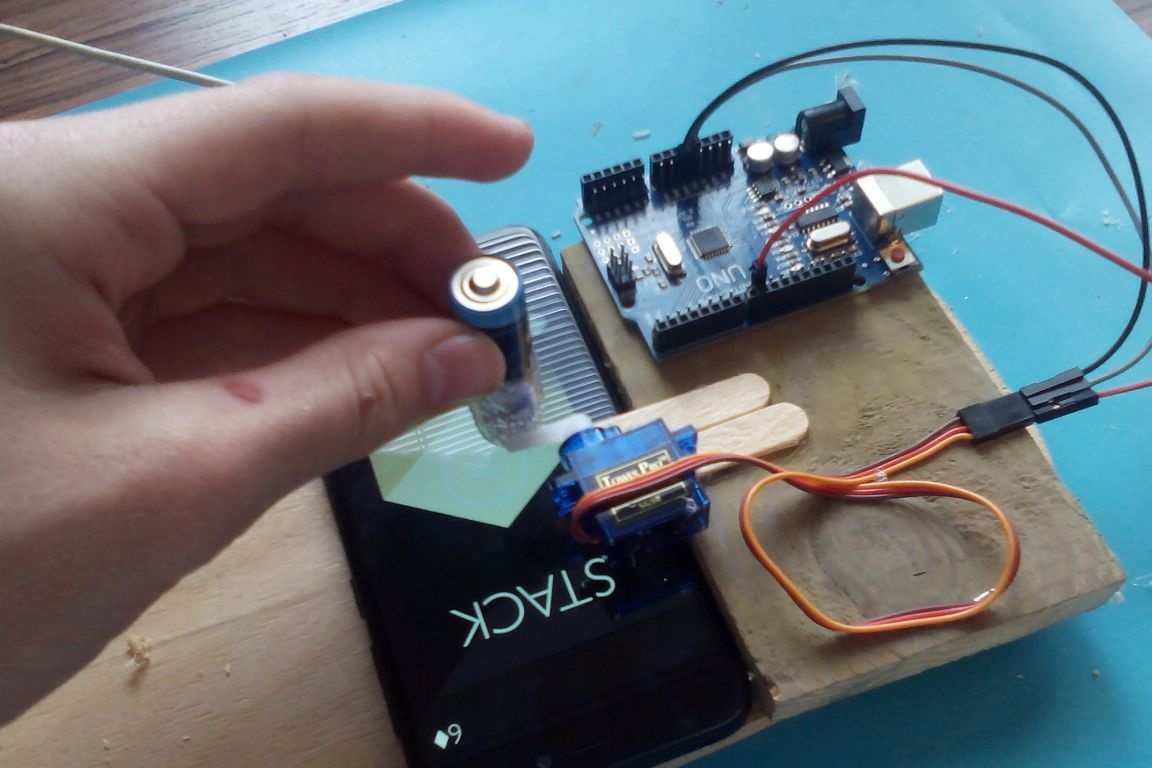
Agafem una bateria ordinària del dit i una cara negativa el més estretament possible, l’emboliquem amb paper film i, després, la enganxem de manera molt hermètica:

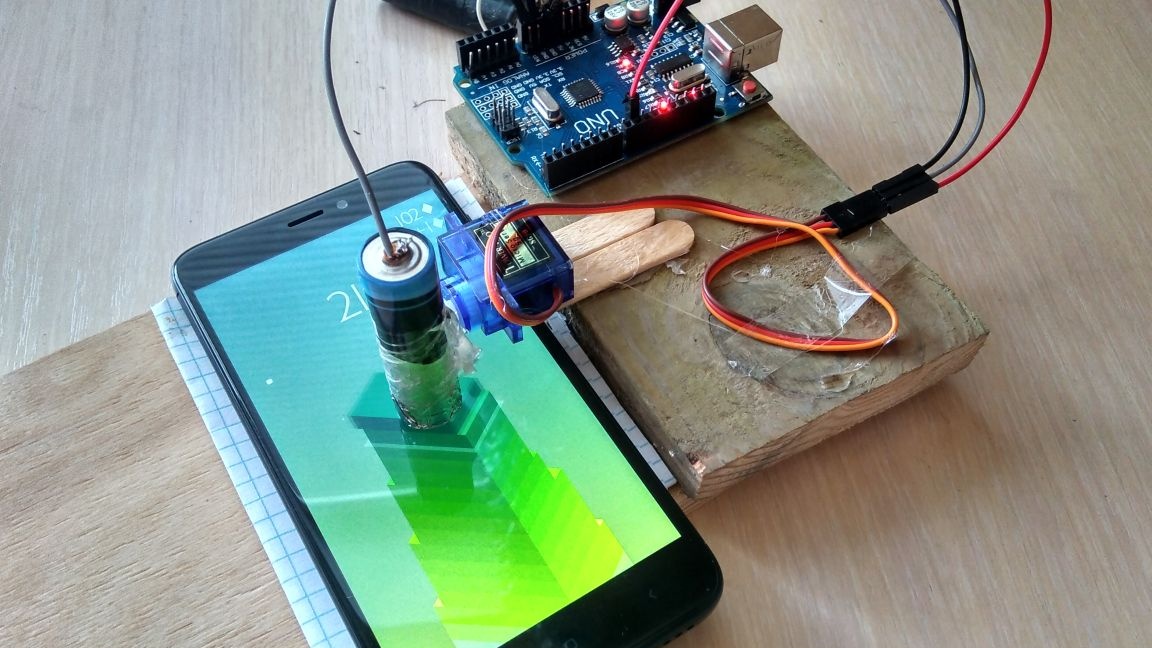
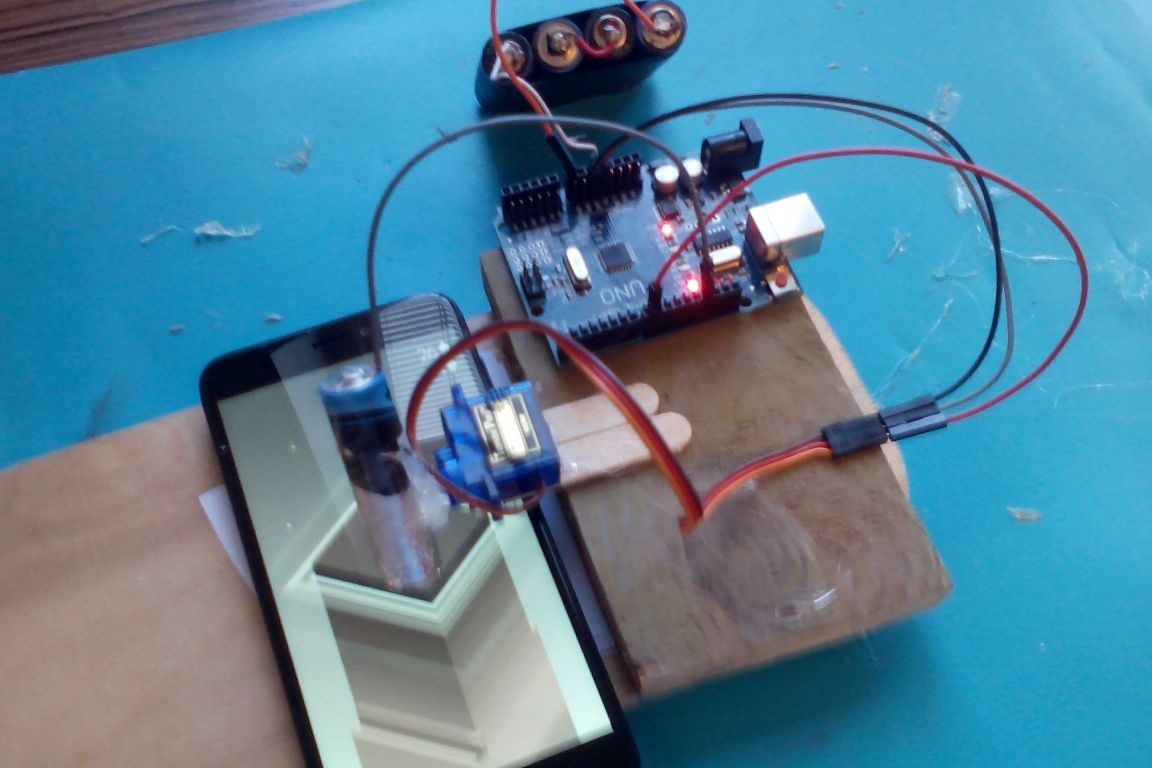
Ara necessiteu posar el telèfon al contraplacat sota el servomotor, unir la bateria al capdamunt i anotar a quin nivell enganxarem el nostre "estil". Després d'haver-ho notat tot, enganxem fermament el "llapis" a la palanca del servomotor, estrictament a un angle de 90 graus (el mateix angle hauria de ser quan apliquem el "llapis" al telèfon quan el vam mesurar). Tot ha de funcionar com es mostra a la foto:

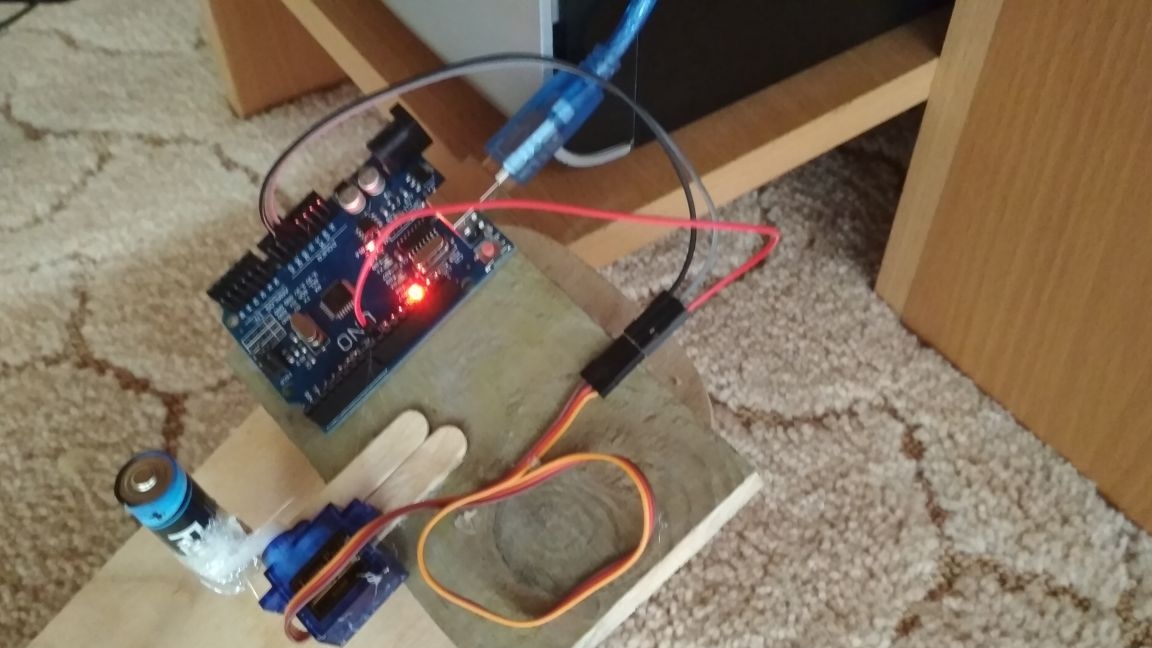
Ara connectem el nostre "robot" a l'ordinador a través del port que està configurat a l'arbuino IDE, executem el nom anteriorment IDE d'Arduino i copiem l'esquema següent, i després fem clic al botó "descarregar". Si tot es fa correctament, l’esbós es carregarà sense errors i al cap d’uns segons el servomotor iniciarà el seu treball. Si teniu diferències importants en les mides de l'estil i del servomotor, feu aquest croquis per vosaltres mateixos, és bastant simple.
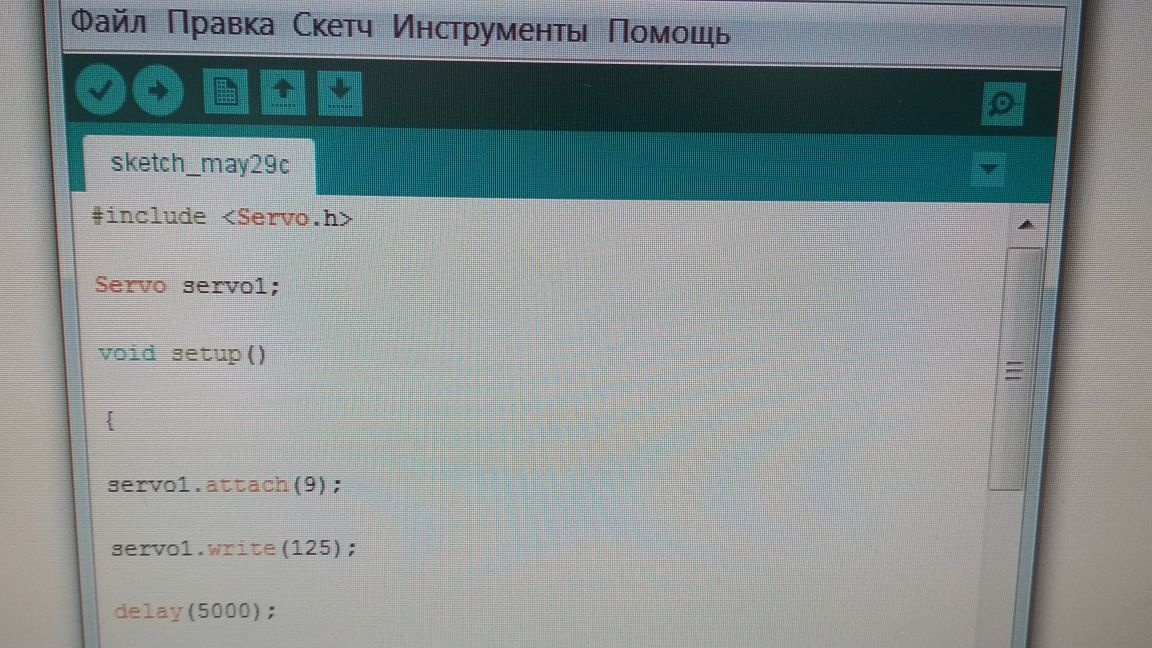
Aquí teniu un esbós:
#incloure
Servo servo1;
nul configuració ()
{
servo1.attach (9);
servo1.write (125);
retard (5000);
servo1.write (90);
retard (200);
servo1.write (125);
retard (750);
}
bucle void ()
{
servo1.write (90); // 1
retard (200);
servo1.write (125);
retard (600);
}Mitjançant cinta adhesiva o cinta elèctrica, enrolem el costat despullat d’un fil de tipus “mare a mare” amb una sortida de “mare” tallada al costat més del nostre “estil” i sortim aquest fil a Gnd a Arduino:
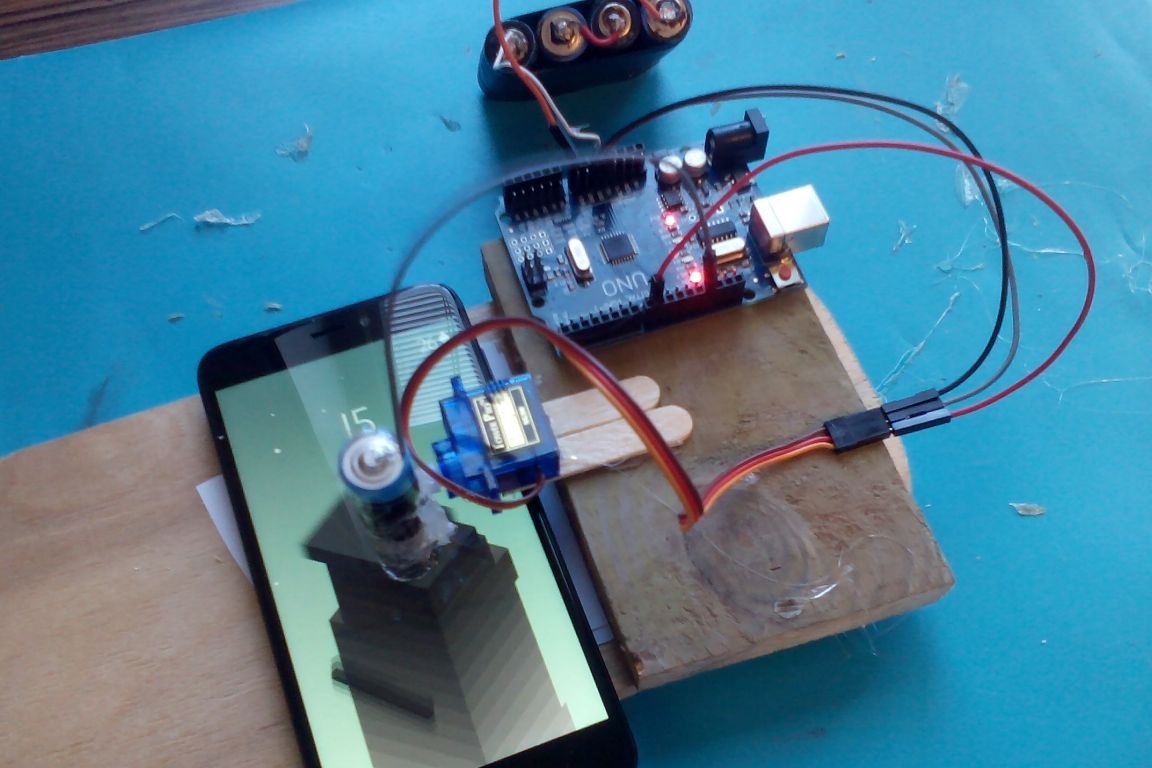
Doncs bé! El nostre senzill el robot llest i queda només provar-ho! Per fer-ho, posem el telèfon sota l’estil, iniciem l’aplicació Stak i col·loquem el telèfon perquè estigui per sobre del botó “reproduir”, que s’indica amb una fletxa, connectem l’alimentació a l’arduino bé amb l’ajut d’un adaptador especial o en sortirem el plus de la nostra “bateria” a Uin a Arduino i menys. per guanyar. després de connectar la potència, el nostre robot comença immediatament a "jugar". I tot i que, degut al fet que no utilitzava un estil normal, sinó una Bateria, el nostre robot sovint no va arribar al ritme i va faltar, va "jugar molt de temps. Si tot es fa amb molta precisió, generalment es reproduirà fins que el telèfon baixi.

Gràcies a tots per la vostra atenció!