
Aquest el robot controlat per smartphone Bluetooth. L’acceleròmetre del telèfon intel·ligent mesura l’angle del telèfon cap a l’esquerra / dreta, amunt / avall, utilitza aquestes dades per calcular la velocitat dels motors direccionals, les dades es transmeten mitjançant Bluetooth a Arduino
El que necessita per construir un robot.
Arduino uno, mòdul Bluetooth HC-06, dos motors de 300 RPM 12v per a engranatges, controlador de motor H-bridge L298N doble pont H
12 a 1,3 Una bateria de plom àcid. Cada motor consumeix 0,4A, més el consum de la lògica del conductor. Cables Arduino, bateries ordinàries de 9 v i un connector per connectar la bateria a l’Arduino. Cables elèctrics per a la connexió de conductors de motors elèctrics. Cable USB Telèfon amb versió Android 4 o superior. 4 rodes de goma de 50 mm giratòries de Screwfix o Toolstation; dos hubs universals Lynxmotion HUB-02.










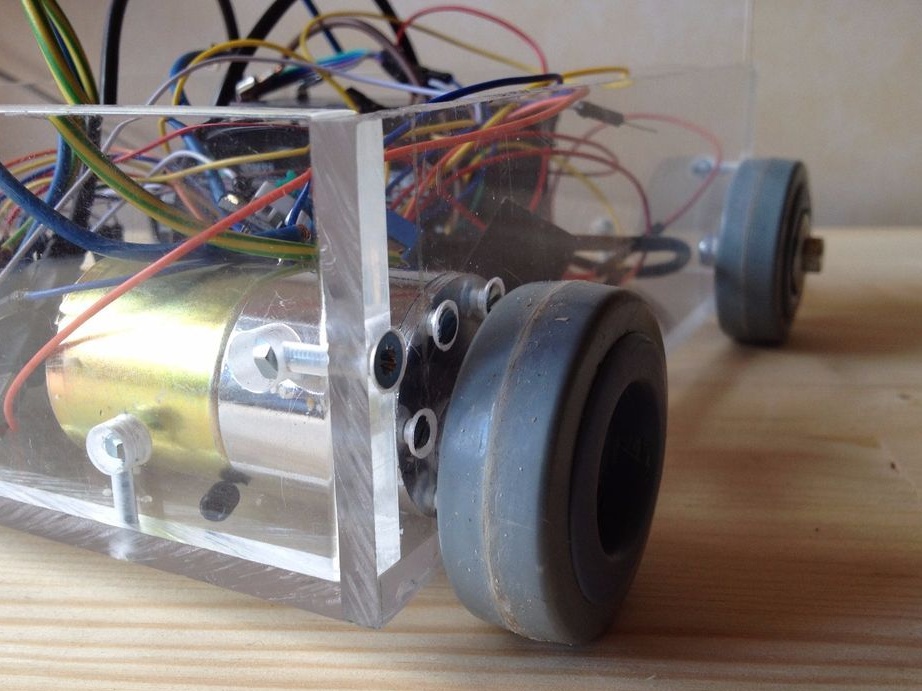
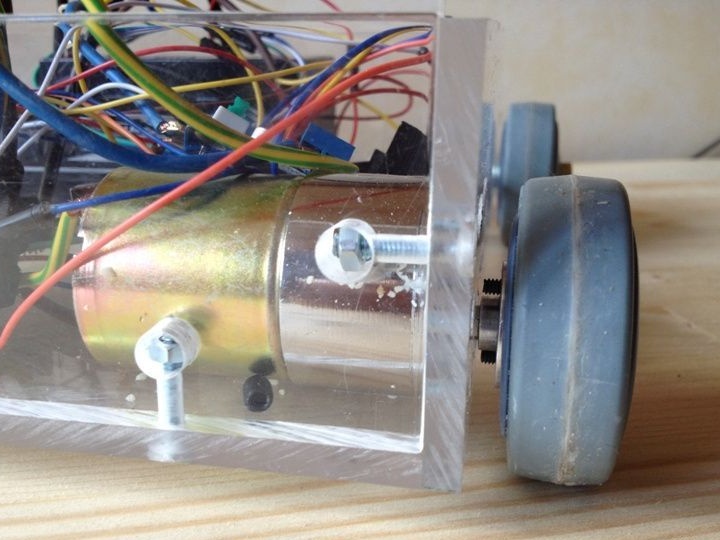
El estoig es munta de plàstic de 22 cm de llarg per 17 cm d'ample. S'han de connectar dos motors a l'eix i fixar-los amb un passador roscat.
Rodes anteriors
El cautxú s’elimina dels rodets i s’hi foren dos forats segons els forats dels cubs. Els hubs es fixen en els eixos que passen per la carcassa amb passadors roscats. Després d'això, els corrons es fixen als cubs i se'ls posa goma.
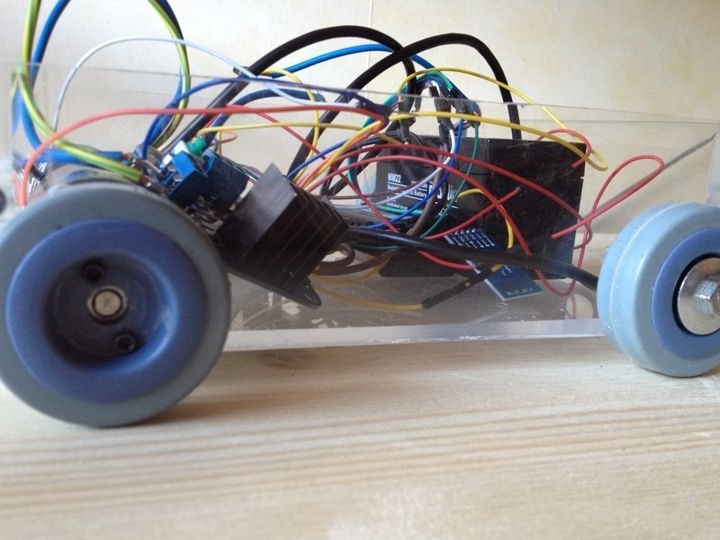
Rodes posteriors
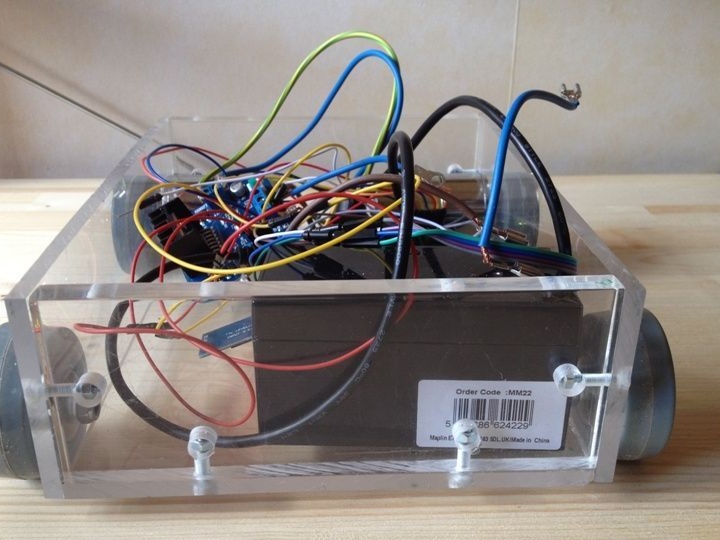
Les rodes posteriors simplement estan desenroscades de la frontissa i es fixen a través de forats forats a la carcassa.
Connexions Elèctriques
Es produiran problemes per carregar el codi del programa a Arduino. Això es deu al fet que el mòdul Bluetooth, els seus contactes RX \ TX, estan connectats als pins 1 i 2 d'Arduino, que també s'utilitzen per transferir dades mitjançant USB. Cal canviar els contactes 1 i 2 a 11 i 12 de la biblioteca connectada, que s’utilitzaran per a la transferència de dades.
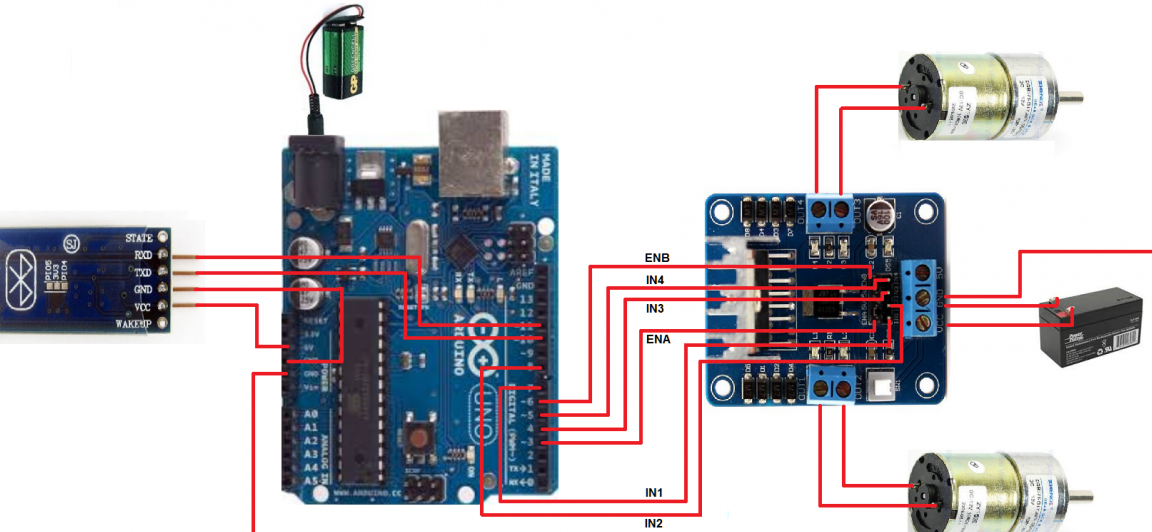
El conductor no necessita una font d’alimentació per part de la lògica. 12V és suficient per alimentar la lògica del conductor i el motor mateix. El mínim de la bateria s'ha de connectar tant amb l'Arduino com amb el conductor. Els contactes del conductor del motor ECA / 5V i ENB / 5V es poden saltar. Ha de ser eliminat abans de connectar-se a l'Arduino. No s’ha de connectar res als dos pins 5V.
Codi Android.
El fitxer adjunt s’ha de desempaquetar i importar a Android Studio, empaquetar-lo a l’apk i instal·lar-lo al telèfon.
Arxius clau:
Activitat de dispositius emparellats:
deviceList.java
Activity_device_list.xml
Activitat de control de LED i de moviment:
ledControl.java
Activity_led_control.xml
Manifest:
AndroidManifest.xml
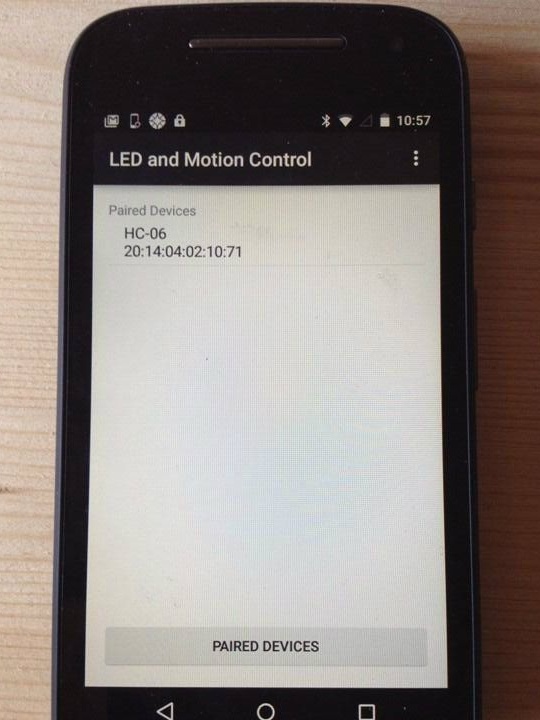
Parellat Dispositius Activitat mostra dispositius Bluetooth disponibles. Tan bon punt els dispositius estan connectats, el control es transfereix a LED i Activitat de control de moviment.
Els botons d'encesa / apagat envien un missatge "on" o "off" a l'Arduino, encenent o desactivant el LED integrat. L’acceleròmetre del telèfon controla el moviment, que transmet valors x / y des del sensor, cada cop que aquests valors canvien. A partir d’això, Arduino calcula la velocitat i la direcció de gir dels motors en l’interval de 0 a 255. Transmet aquests valors Arduino en forma de “L-255:” o “R100”, etc. A partir d’això, Arduino envia els comandaments de velocitat de rotació del motor esquerre a ENA, el dret a ENB i canvia el sentit de gir canviant la polaritat a IN1, IN2 per a l’esquerra, N3 i N4 per al motor dret.