
La particularitat del robot BIBOT-1 és que pot realitzar dues tasques. Es pot moure darrere d’una font de llum o al llarg d’una línia negra que es pot dibuixar sobre paper. El robot molt flexible en configuració, és a dir, posteriorment es pot personalitzar a qualsevol condició desitjada, és a dir, per fer-lo més sensible a la llum o menys. També és possible ajustar la velocitat de gir dels motors, això permetrà que el robot funcioni millor, sobretot quan es mou per la línia.

El dispositiu i el principi del robot:
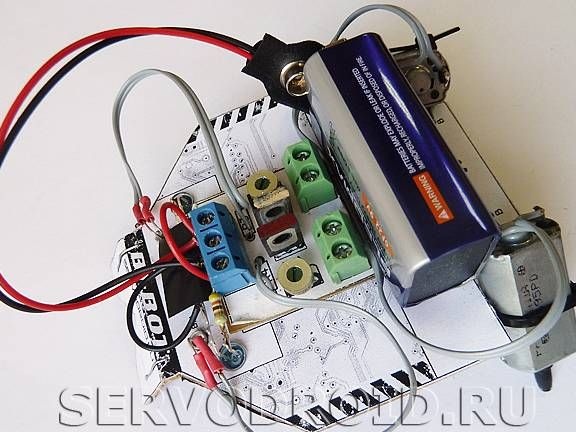
La base del robot està feta de cartró, la plantilla s’imprimeix a la impressora i, després, s’estavella. Pel que fa al mòdul de components de ràdio, es va prendre com a base un textòlit, el mòdul està unit a la base del robot. Per fer que el cos sigui més dur, s’utilitzen costelles especials en el disseny.
Els motors s’instal·len com en la majoria d’aquests casolans, és a dir, en un angle. Degut a això, no cal posar les rodes i la caixa de canvis. Per evitar que els arbres llisquin sobre la superfície, es posen protectors.
S’utilitza una bateria de 9V tipus 6F22 com a font d’energia. La bateria està connectada amb cinta adhesiva i sempre es pot substituir fàcilment.
Pel que fa a l’interruptor, doncs auto va decidir evitar instal·lar-lo. El robot s’encén i s’apaga manipulant el clip que s’uneix a la bateria.
I, finalment, l’ajust del robot. Per ajustar la sensibilitat del robot, el sistema disposa de dues resistències d’ajust. Quan giren, podeu ajustar la sensibilitat del robot a la llum i també podeu ajustar la velocitat de gir dels motors. Com més sensible sigui el robot a la llum, més ràpid es mourà i viceversa.
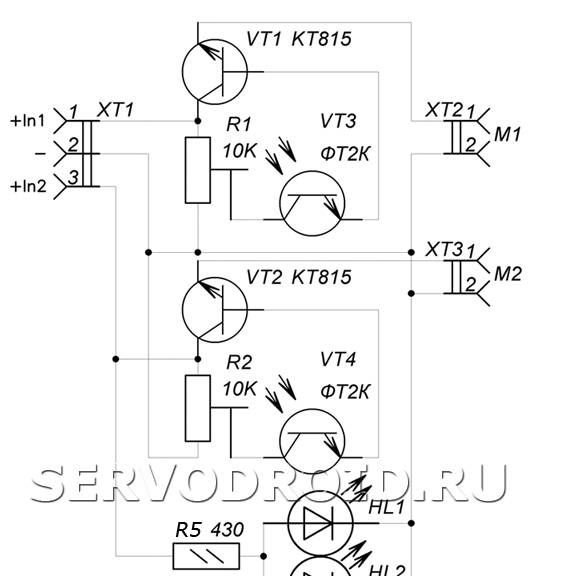
Pel que fa al principi de funcionament, tot està exposat al diagrama.
Materials i eines:
- Bateria i pinça de 9 V per a la connexió;
- dos connectors per a la connexió de motors (bornes de dues seccions);
- motors;
- cargol de niló;
- protector (corró de goma);
- dos fototransistors;
- dos LED infraroigs;
- un suport entre una grapadora;
- terminal de tres seccions per a la connexió d'alimentació;
- resistència d’afinació.

Procés de fabricació:
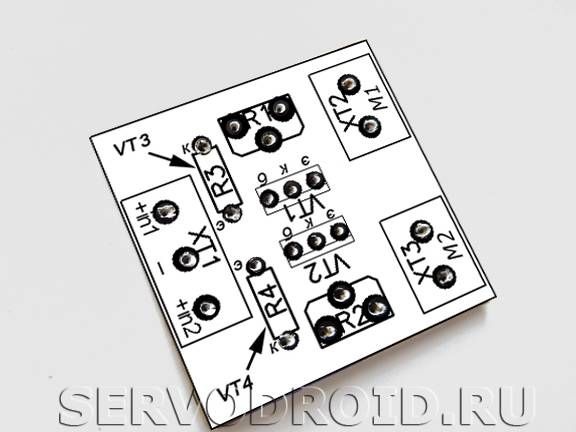
Primer pas. Disseny de PCB
El cànon es crea mitjançant el mètode LUT. Abans del treball, s’ha de netejar bé la superfície de la fibra de vidre, i després s’ha de rentar i assecar completament. Després de la fabricació, les pistes conductores s’han de comprovar amb un multímetre per a un curtcircuit.
Pas Segon Instal·lació electrònica elements
A continuació, heu d’agafar un dibuix imprès en paper i enganxar-lo al tauler creat. En aquest cas, els forats del paper i del PCB han de coincidir exactament. A continuació, s’instal·len els components de ràdio tal i com s’indica al diagrama. En el procés de treball, la instal·lació de resistències R3, R4 necessita instal·lar fototransistors VT3, VT4.
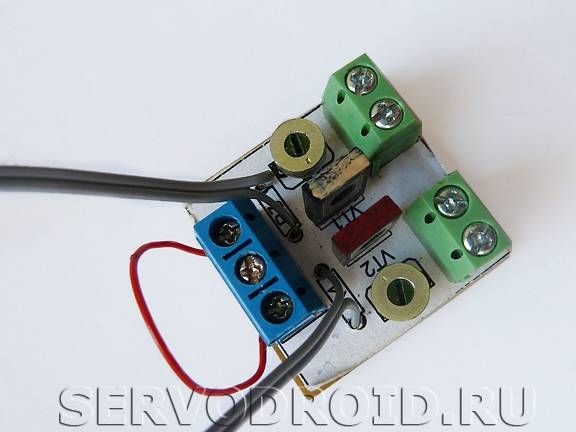
Les seccions extremes del bloc de terminals de tres seccions XT1 s’han de connectar amb un cable de muntatge. Els punts de connexió dels contactes han d’estar ben aïllats, el millor és utilitzar un tub d’encontre calor per a aquests propòsits.
Tercer Pas Com crear un cas
S'ha d'imprimir un dibuix del cos en un full normal de paper A4. A continuació, heu d’agafar un tros de cartró ondulat i enganxar-hi un dibuix, posteriorment s’ha de tallar el estoig al voltant del perímetre.
Quan el pictograma "tisores" estigui situat al llarg de línies negres, s'han de fer talls. Posteriorment, seguint les línies de punts negres, heu de doblegar el cartró com a la foto i posar les fletxes negres.



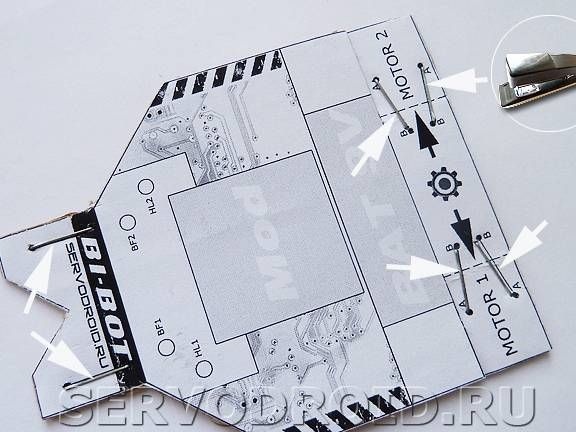


Davant i posterior de la carcassa a la posició especificada mitjançant una grapadora, cal instal·lar els claudàtors. Els llocs de la seva instal·lació estan marcats per línies negres amb cercles. Calen grapades per fer el marc més dur. Després d’instal·lar els claudàtors, són tediosos a doblar-se al llarg de les línies de plec.
Als llocs marcats BF1, BF2, heu de fer forats per a la instal·lació de fototransistors. Als llocs HL1 i HL2, heu de fer forats de tal mida que s'ajustin al diàmetre de la carcassa dels leds infrarojos.
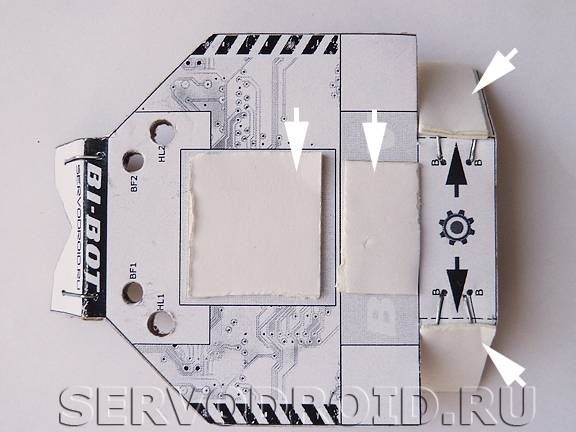
Als llocs designats com a Mod "," BAT 9V "i" MOTOR 1 "," MOTOR 2 "enganxen les tires de cinta a doble cara.
Quatre pas Instal·lació de motors
Els motors estan muntats en posició amb lligams de niló. Per evitar que els eixos caiguin, cal portar-los amb protectors. Estan fetes de bandes de goma, que es troben a les varetes de l’heli de les plomes. A la mateixa etapa, soldem els cables als motors.


Cinquè pas Instal·lació de leds infrarojos
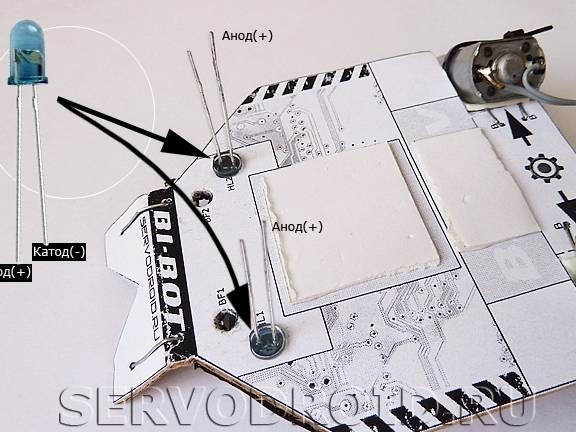
A l’hora d’instal·lar leds d’infrarojos, és important no confondre les seves conclusions, ja que per als elements importats un contacte llarg és l’ànode, és a dir, un avantatge. Els leds estan instal·lats a les posicions HL1, HL2 tal com es mostra a la foto. Les troballes estan doblades de manera que es poden connectar paral·lelament els díodes.
S'ha de soldar una resistència de 430 ohms al contacte positiu dels LED, i un fil negre al contacte negatiu.
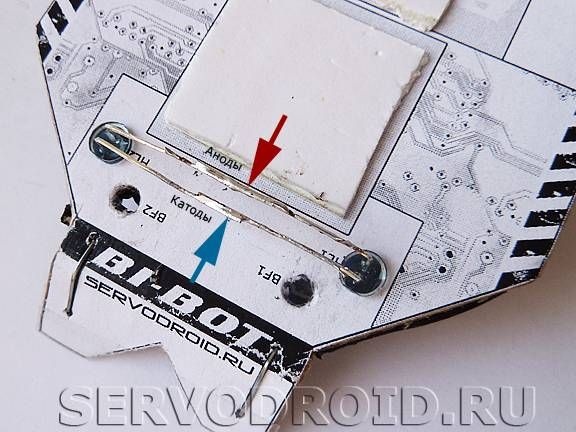
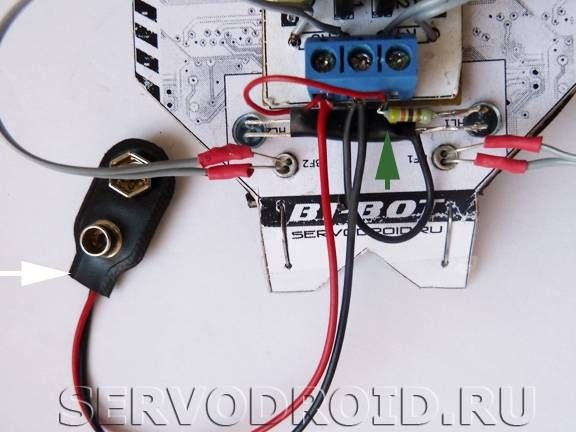
L’altre extrem del fil negre s’ha de connectar al passador central del bloc terminal de tres seccions. Pel que fa a la sortida de la resistència, aquesta està connectada al terminal del bloc terminal.
Pas sisè Fase final de construcció
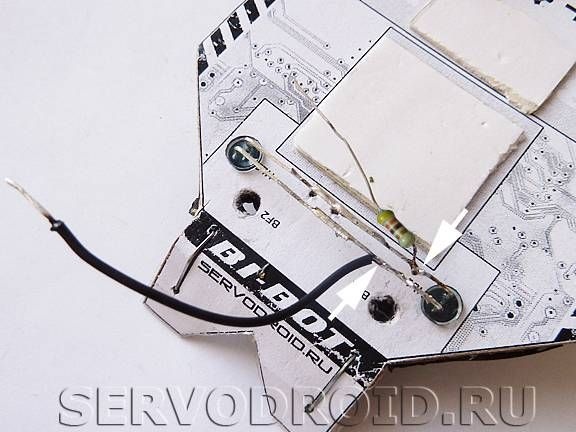
Per tal que el robot es mogui al llarg de la línia, es posen fototransistors al lloc BF1, BF2 com a la foto.
Els transistors per al moviment darrere la font de llum es col·loquen a la part posterior.
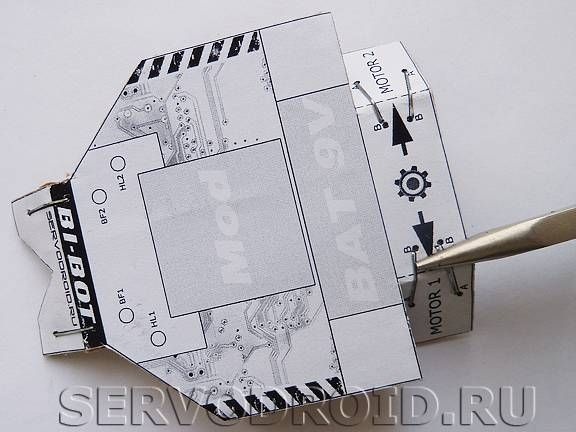
En conclusió, els motors estan connectats i es posa la bateria.


Tot això, el robot ja està a punt. Ara podeu provar d’activar-lo i configurar-lo a les condicions desitjades.