

Tal el robot ja s’ha creat i s’anomena DIY: LightBot. A més, qualsevol pot recollir-lo, es poden trobar fàcilment tots els elements per a la creació i es farà el muntatge del robot de manera senzilla. Aquest tipus de robot anirà constantment després que el propietari sigui a les fosques i el posi de relleu en el lloc adequat, cosa que elimina la necessitat de mantenir la llanterna a la mà. El propietari serà supervisat pel robot gràcies a un sensor d'infrarojos que es troba connectat al peu del propietari.
Materials i eines per crear un robot:
1. Far infraroig. Aquest dispositiu constarà de quatre LED infraroigs que es poden trobar al comandament a distància des del televisor.
2. Dues rodes d'un conjunt de K'nex o joguines infantils.
3. Dos motors petits (es poden trobar a les joguines infantils).
4. Dos transistors d’infrarojos com el NPN o el fotorresistor. Els fototransistors per infrarojos no són difícils de comprar.
5. Tres bateries AA i una de 9 volts.
6. Tub de PVC.
7. adhesiu de fusió calenta.
8. Forquilla de plàstic d’un sol ús.
El procés de fabricació del robot:
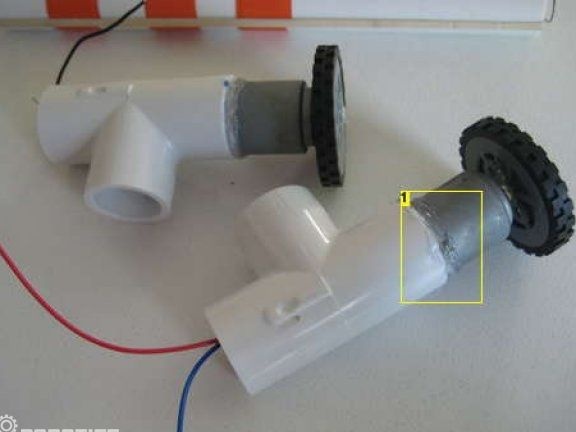
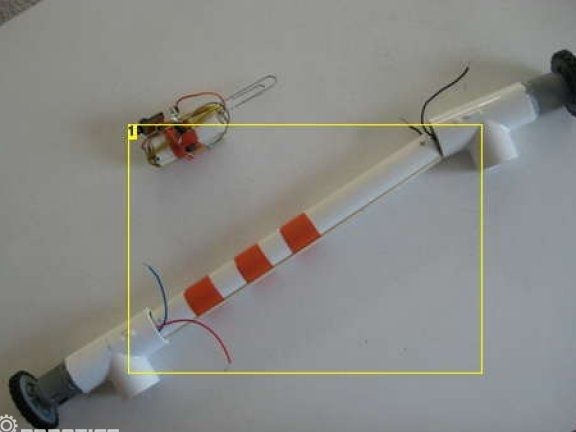
Primer pas. Instal·lació del motor
Primer cal instal·lar els motors. Per a la seva instal·lació s’utilitzen “tees” de plàstic, que després es posen al tub principal. Els motors es fixen amb adhesiu de fusió calenta. No és necessari sentir pena per la cola aquí. També en aquesta fase es poden posar rodes a l’eix dels motors. Perquè es mantinguin fermament, també es poden fixar amb adhesiu de fusió calenta.
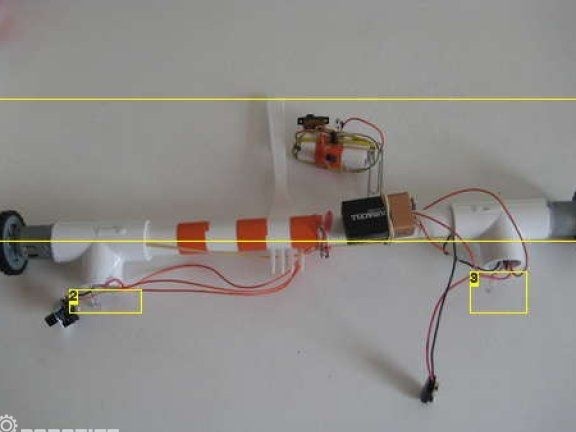
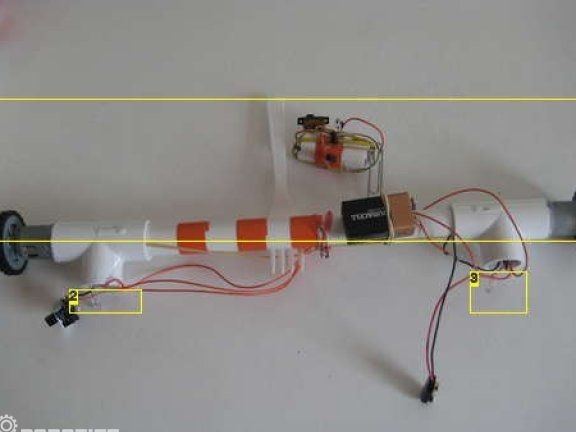
Pas Segon Instal·lació de fotorresistors
Per fer el seguiment del far infraroig es necessiten fotorestal·ladors. Seran una mena d’ulls robotitzats. Depenent de la direcció en què s'apagui la llum, el robot accelerà un dels motors per girar en la direcció correcta.
Les resistències de llum s’uneixen als "tees" als llocs indicats pels números 2 i 3. En aquestes posicions es poden fixar amb un adhesiu de tres pals.
Tercer Pas Instal·lació d’alimentació
En total, el robot funciona amb dues fonts d’energia. Es tracta de tres bateries AA i una de 9 volts. Pel que fa a les bateries dels dits, s’instal·len a l’interior del tub.Bé, una bateria de tipus "Krona" s'adjunta al telèfon des de fora.
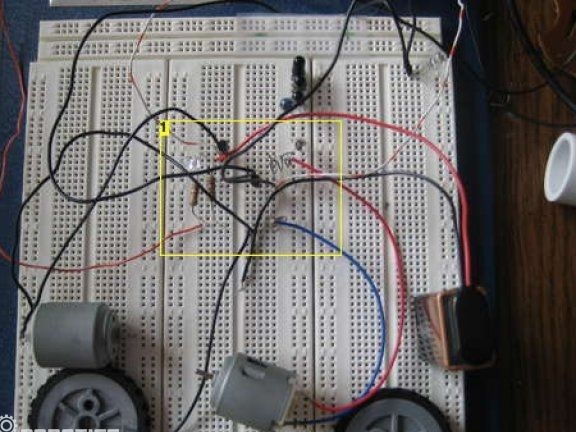
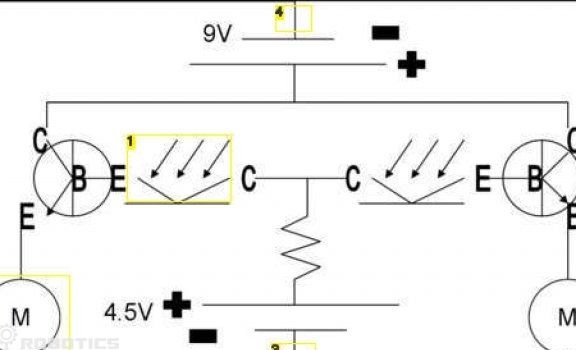
Quatre pas Circuit robotitzat
L’esquema està dissenyat de tal manera que si el robot veu radiació per un costat, accelera el motor des del costat oposat, de manera que el robot gira. La velocitat del motor desitjada s’obté substituint experimentalment les resistències.
Un altre circuit es pot complementar amb un commutador. S'ha d'instal·lar de manera que interrompi l'alimentació del robot.
Al diagrama, el número 1 denota un fototransistor, 2 -el controlador del motor, 3- un lloc per instal·lar un commutador, 4 - també podeu posar un interruptor aquí.
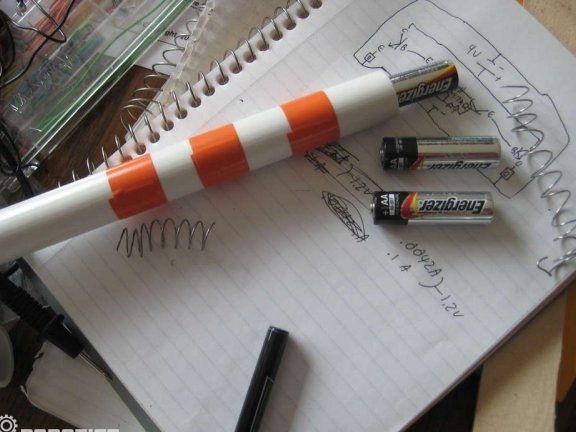
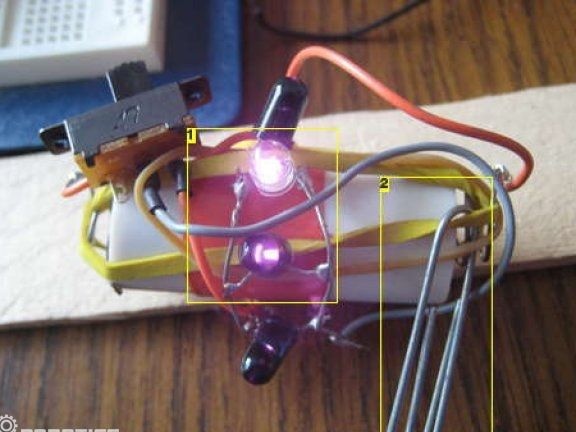
Cinquè pas Crear una balisa IR
Per crear una balisa IR, es necessita un tub de clorur de polivinil curt on hi ha instal·lada una bateria AA. Els contactes es mantenen gràcies a una banda elàstica i l’alimentació dels quatre díodes d’infrarojos està controlada per un interruptor. És impossible veure tanta llum a l’ull, per comprovar l’operativitat dels díodes que necessiten ser visualitzats a través d’una càmera digital. La balisa es fixa amb un clip ordinari a la cama.
Pas sisè L’etapa final del muntatge del robot
Ara tot s’ha de connectar tal com s’indica al diagrama. També cal muntar la part mecànica, cal parar la màxima atenció als fotoresistors, han de quedar fora, ja que en cas contrari no podran recollir el senyal de la balisa. Ara, engegant el robot, cal passejar-lo i veure què farà.
Per descomptat, el robot pot no anar després del propietari per primera vegada, però no hauria de desesperar, ja que es pot modificar l'esquema i configurar el robot segons sigui necessari. Segons l’autor, en el futur es pot instal·lar programari al robot, gràcies al qual reconeixerà objectes i persones. També podeu instal·lar diversos sensors i fer d’aquest robot un dispositiu d’alta tecnologia.