

Els vibrobots són així robotsque es mouen a causa de les vibracions. Tot i que el seu disseny és força senzill, no són menys impressionants en el treball que els seus germans tècnicament més sofisticats. Aquest robot utilitzarà les truges com a motor, això és un tipus de potes.
El robot descrit a l'article pot canviar de forma independent la trajectòria del moviment i per si mateix circumval·la els obstacles. Com a experiment, l’autor va crear dos robots sobre els quals s’instal·laven diferents fonts d’energia i motors. En principi, no hi ha normes estrictes pel que fa als materials emprats, el més important és adherir-se a l’esquema donat a l’hora de muntar el robot.

Materials i eines per a la fabricació:
- lligams de niló de mida 3x150mm;
- cinta aïllant de color negre;
- Bateria de 9 volts (6F22);
- disc làser (CD o DVD sense diferències);
- carcassa de protecció;
- Conector de bateria de 9 volts;
- excèntric (esborrar).

El procés de fabricació del robot:
Primer pas. Crea la base del robot
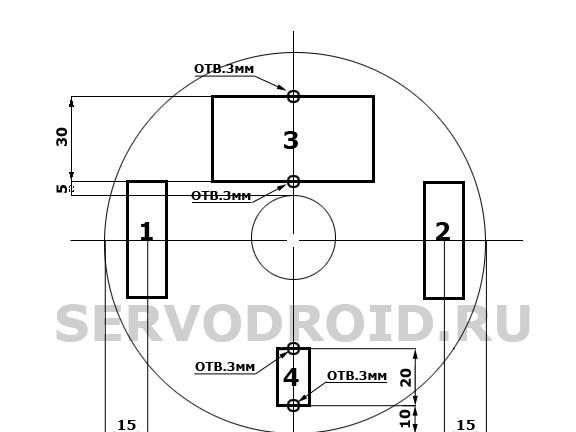
Com a base per al robot, s'utilitzarà un CD o DVD regular. Feu forats clarament segons l’esquema que es presenta a la foto. Sense excepció, tots els forats es perforen amb un trepant de 3 mm. Aquest diàmetre és suficient perquè s'utilitza per enganxar nuls. Si decidiu utilitzar un mètode de fixació diferent, els forats es poden foradar a qualsevol altra mida. El dibuix proposat és adequat per a qualsevol muntatge del robot.
Els números 1 i 2 indiquen les ubicacions d’instal·lació dels pinzells, una pila s’instal·la al quadrat amb el número 3 i un motor està muntat al quadrat 4.
Pas Segon Confeccionem i instal·lem mudances
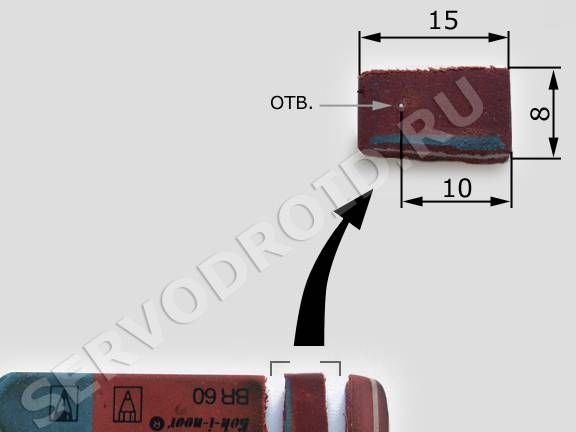
Gràcies a la propulsió, el robot es mourà. Per fer-los cal prendre dos raspalls de dents. El millor és que els pinzells siguin iguals en alçada i forma. Si la forma és diferent, es pot corregir amb unes tisores.
Ara les truges han d’establir la direcció. Per a això, es pren cinta adhesiva i les truges s’embolcallen de la mateixa manera que s’indica a la fotografia. En aquesta posició, el pinzell s’ha de mantenir durant una hora aproximadament, de manera que les truges recordin aquesta posició. A la foto, la fletxa gris indica la direcció cap a la inclinació de les truges.

Un cop establerta la forma desitjada, heu de tallar la part amb les truges del raspall de dents. Després heu d’agafar la pistola de cola i instal·lar les truges al disc als llocs especificats. Tot el treball s’ha de dur a terme de forma ràpida i precisa, ja que la cola calenta es refreda ràpidament i s’endureix.Heu d’intentar instal·lar els pinzells perquè quedin paral·lels els uns dels altres.
Les truges dels pinzells han de dirigir-se, en altres paraules, cap a la bateria a 9 volts. Durant el funcionament, el robot es desplaçarà contra la direcció de les truges, és a dir, la ubicació de la bateria serà la part posterior del robot.

1 - disc, 2 - adhesiu de fusió calenta, 3 - forats per instal·lar el motor, 4 - forats per instal·lar la bateria. Les fletxes blanques indiquen la direcció de les truges.
Tercer Pas Fer un excèntric
Per obtenir vibracions, cal posar sobre l’eix del motor un excèntric, és a dir un objecte desequilibrat. L’autor va fer un excèntric de la goma d’esborrar tallant un tros de mida adequada. Feu un forat al lloc indicat per la fletxa blanca. No ha de ser gran, ja que l’excèntric lliscarà de l’eix del motor. Es pot fer amb agulla.
Quatre pas Producció d’una funda protectora.
Com que la vibració es crea amb la goma rotativa perquè funcioni el robot, és recomanable protegir aquest lloc de diversos objectes. A més, aquesta protecció donarà al robot un aspecte més interessant. La coberta protectora és de paper, que consta de diverses capes. Heu de fabricar un cilindre de paper, la seva mida depèn de la mida del motor. Per donar més rigidesa al paper, es pot untar amb cola i, per tant, aplicar-hi unes quantes capes més. O bé podeu utilitzar cartró per a aquests propòsits.
Per crear una forma cilíndrica, el motor simplement s’embolica amb paper sobre.




Cinquè pas Muntatge final del robot
El motor s’instal·la en un lloc específic i després es fixa amb un cargol de niló. Aquests massissos es poden comprar en botigues especialitzades en la venda de materials de construcció.
La bateria també està fixada amb precisió. És important tenir en compte que la bateria ha d’estar clarament centrada, en cas contrari, la trajectòria del robot pot canviar. Per cert, d’aquesta manera en el futur és possible fixar la trajectòria del moviment casolans.


Ara, entre el connector amb clip i el motor, cal instal·lar un petit interruptor. En conclusió, queda connectar el clip-connector a la bateria i ja podeu començar a provar el robot. Els cables estan connectats per color.
Tanmateix, quan utilitzeu una bateria Kron, no és necessari instal·lar un commutador; podeu engegar el robot connectant el connector.
Bé, per a la segona versió del robot, simplement podeu treure la bateria del dispositiu, però és clar que l’interruptor és més prometedor.
Tot això, el robot ja està a punt, podeu començar a provar. Per obtenir el resultat desitjat, podeu intentar canviar la polaritat, de manera que el motor girarà en el sentit contrari i el robot es comportarà de manera diferent.