




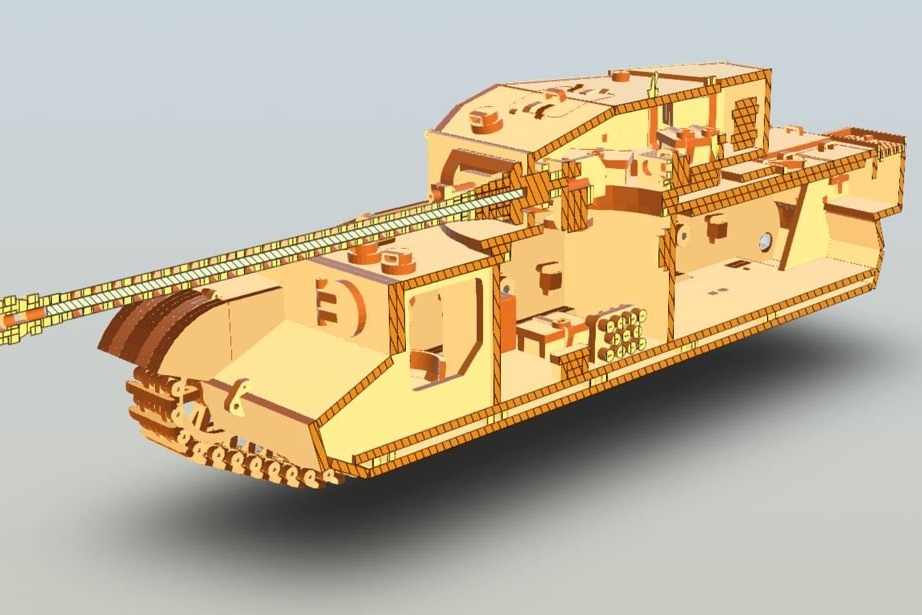
Aquest tanc no és el primer muntatge del mestre. Una característica distintiva d’aquest model particular és la suspensió de molla, dotant el model d’un motor, de manteniment.
Mirem una demostració.
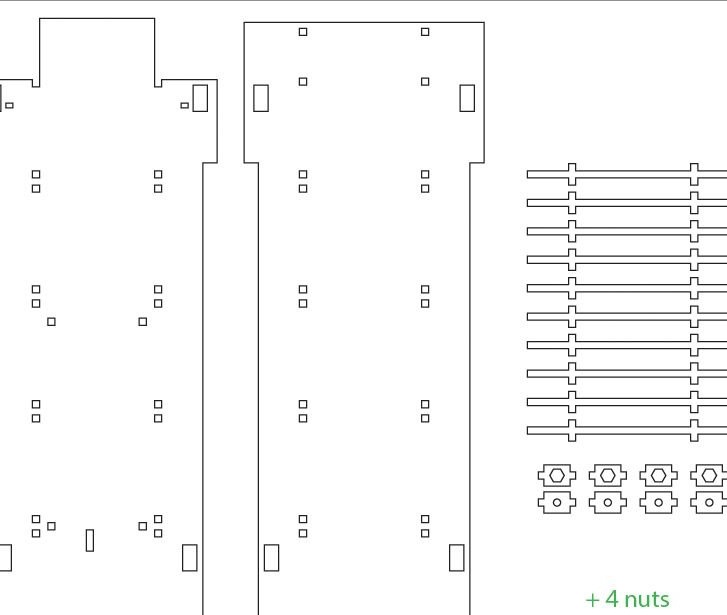
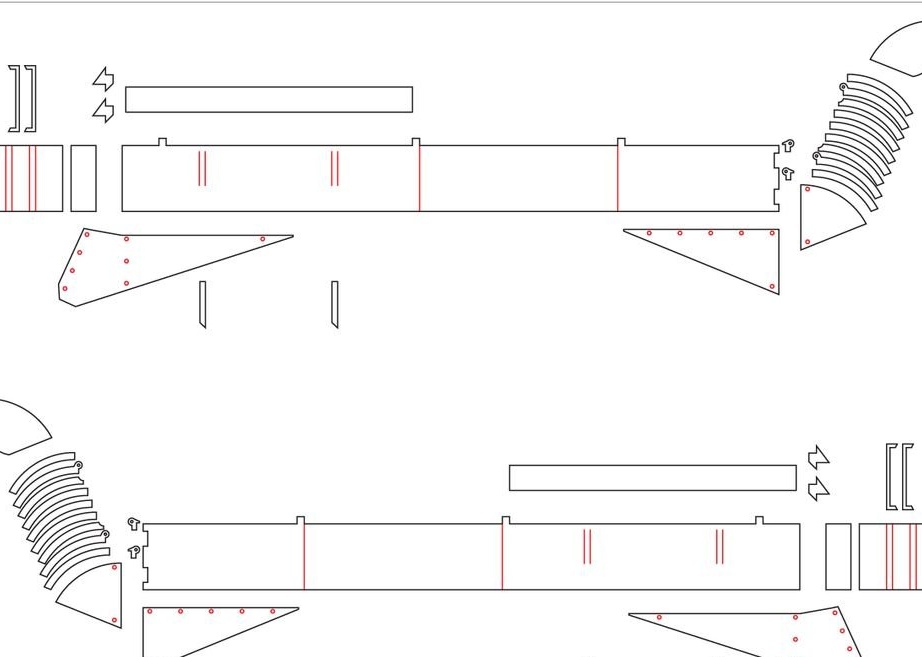
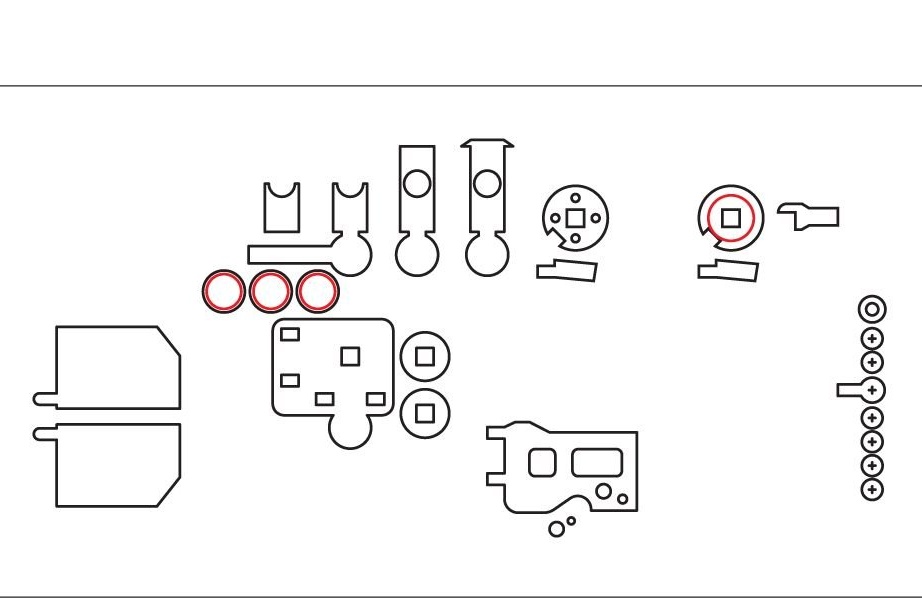
Els detalls de la caixa es tallen en un tallador làser i els fitxers estan disponibles a l'adreça electrònica aquest enllaç.
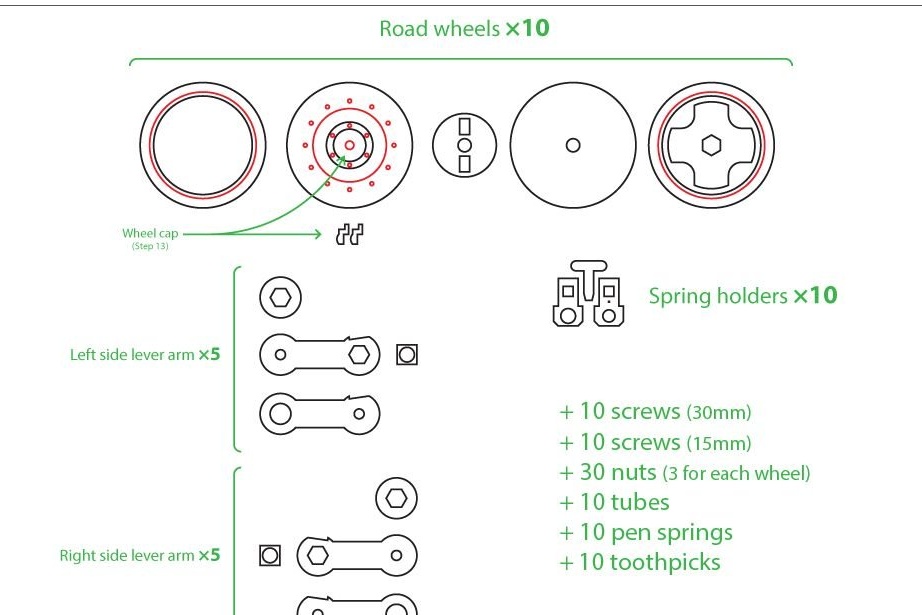
A més de les parts del cos, caldrà el següent
Eines i materials:
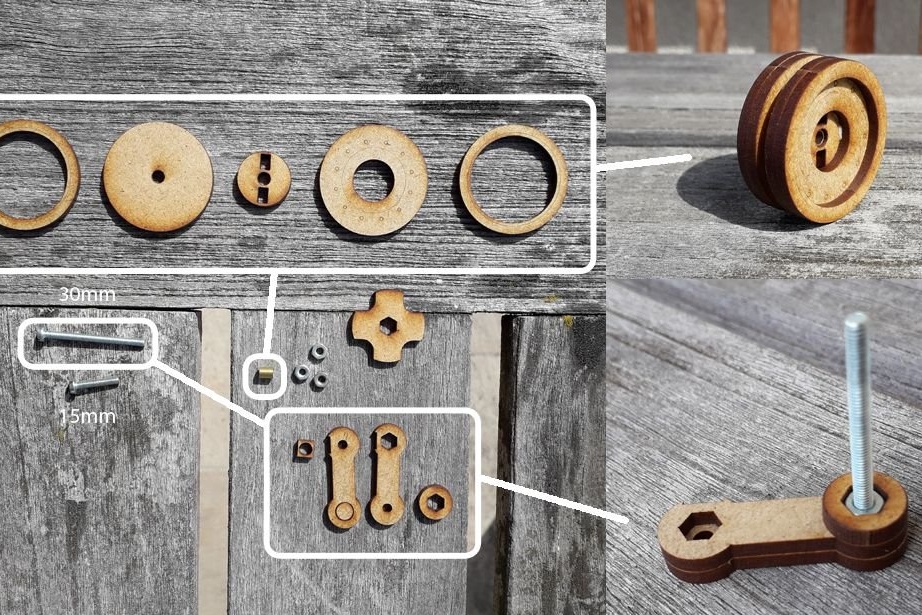
- Cargols Ø 3 mm:
-14 unitats de 15 mm de llargada,
-10 unitats de 25 mm de longitud
-10 peces 30 mm de llarg.
-Tubs x20 Ø4 mm (diàmetre interior de Ø3 mm);
-Fil metal Ø 1 mm;
-Darrega roscada de 3 mm;
-Prots per a penjolls Ø 4,5 mm i una longitud de 30 mm -10 unitats;
- Cargols M4 2 peces;
Palets de dents
-Board;
Microcontrolador ESP8266;
-Conexió de cables;
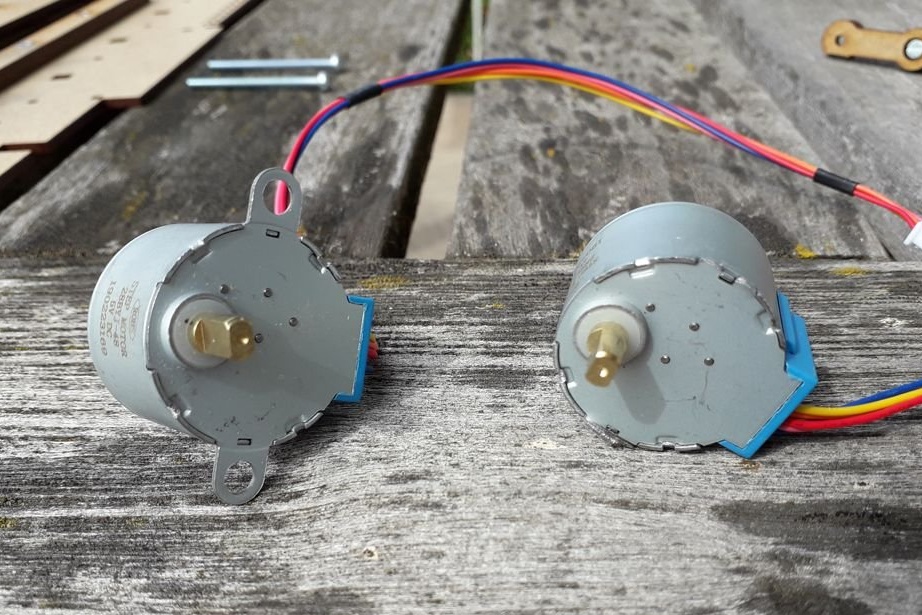
- Motor 28BYJ-48 amb placa de control - 2 unitats;
-Battery 5V;
Primer pas: revisar
En aquest pas, el mestre exposa el seu el model tanc i també indica l’enllaç al lloc on podeu veure el dipòsit de forma desmuntada.
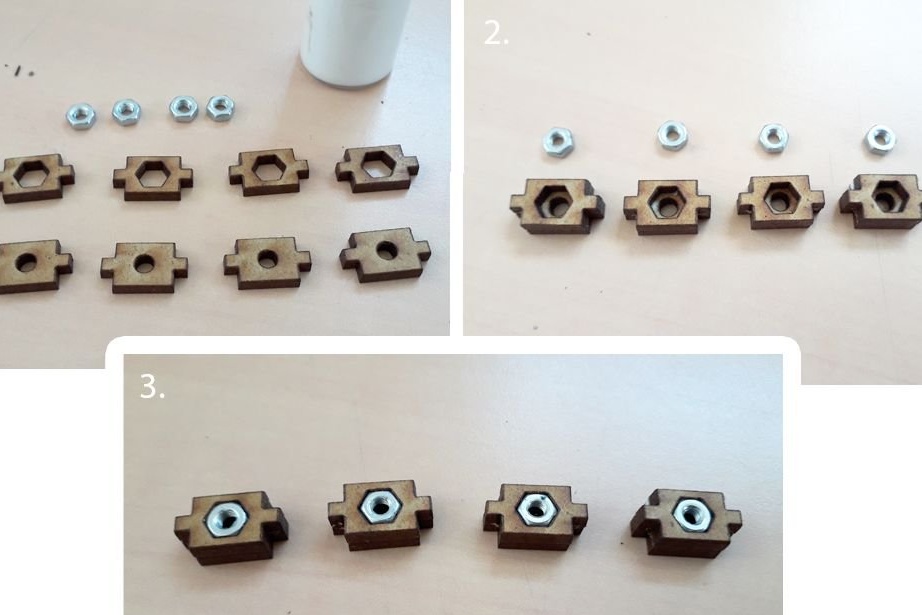
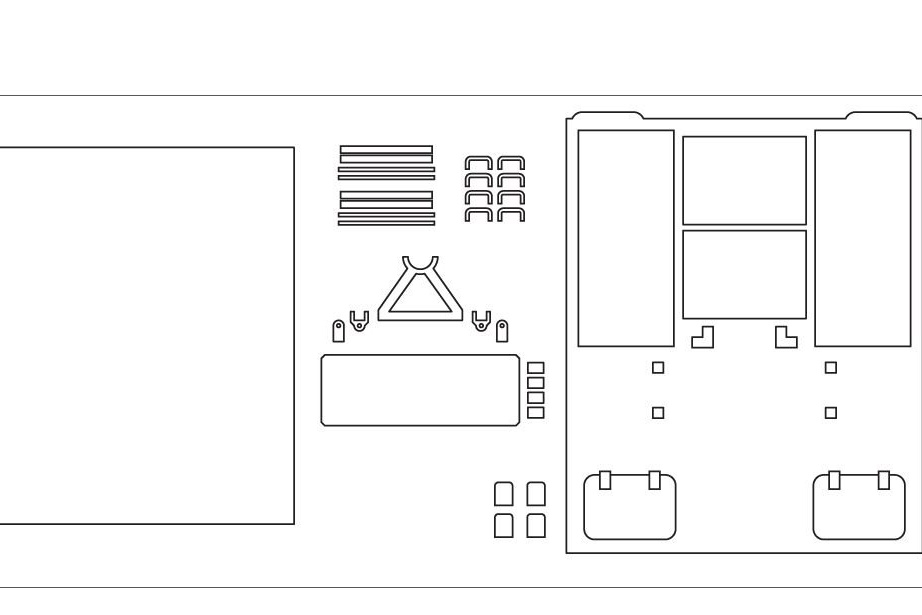
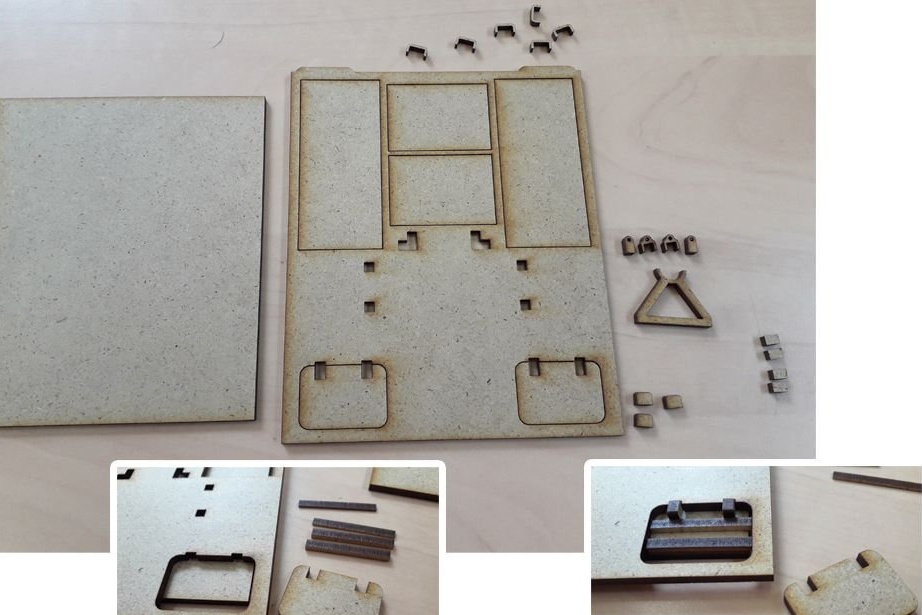
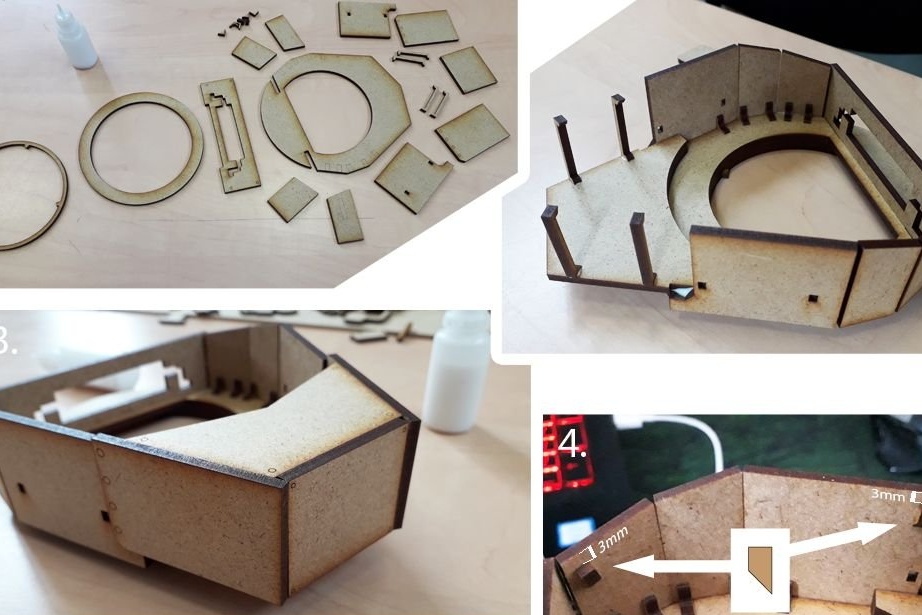
Segon segon: Part inferior
El mestre comença a muntar des de la part inferior del dipòsit. Instal·la fruits secs a les muntures. Suports als costats del fons. Estableix suports. Defineix la segona capa.
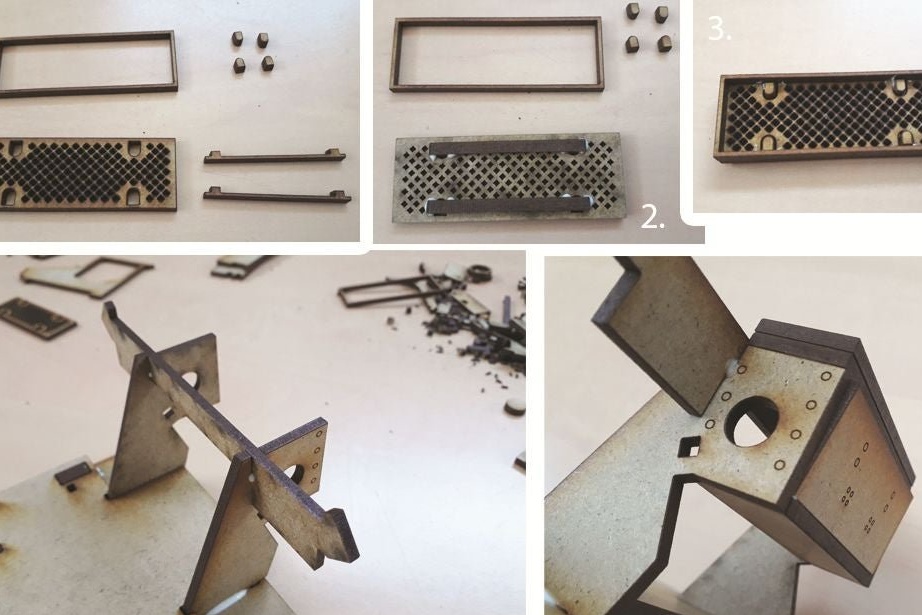
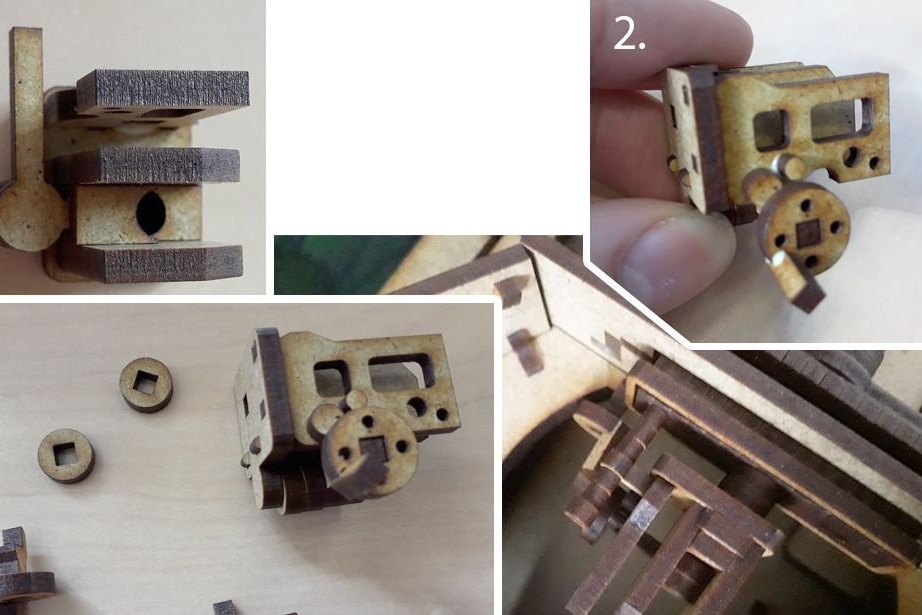
Tercer pas: cas
Comença el muntatge corporal. Munta un radiador i una part posterior.
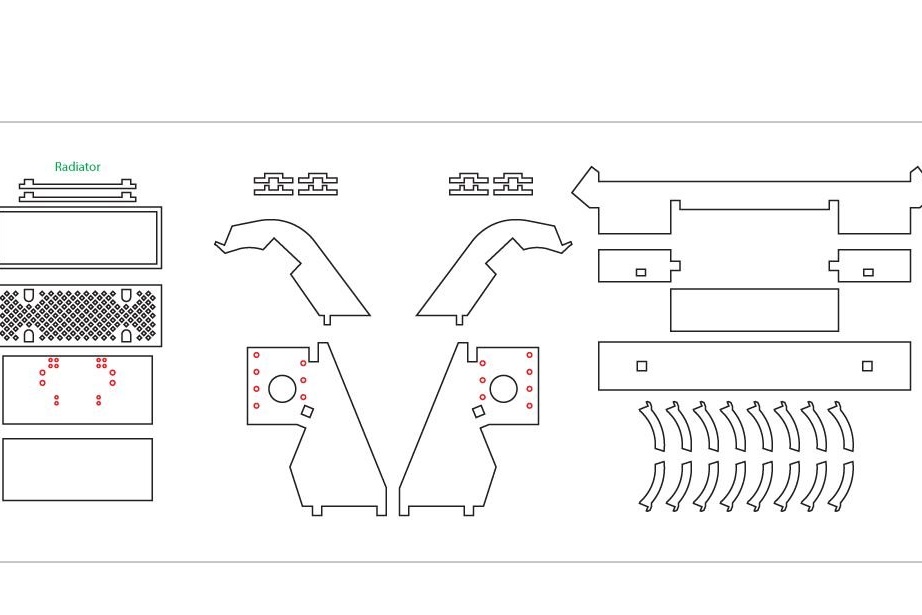
Reuneix el front.
Després de col·locar l’armadura davantera, el casc s’acaba. S'hi enganxaran o enganxaran altres peces sense enganxar
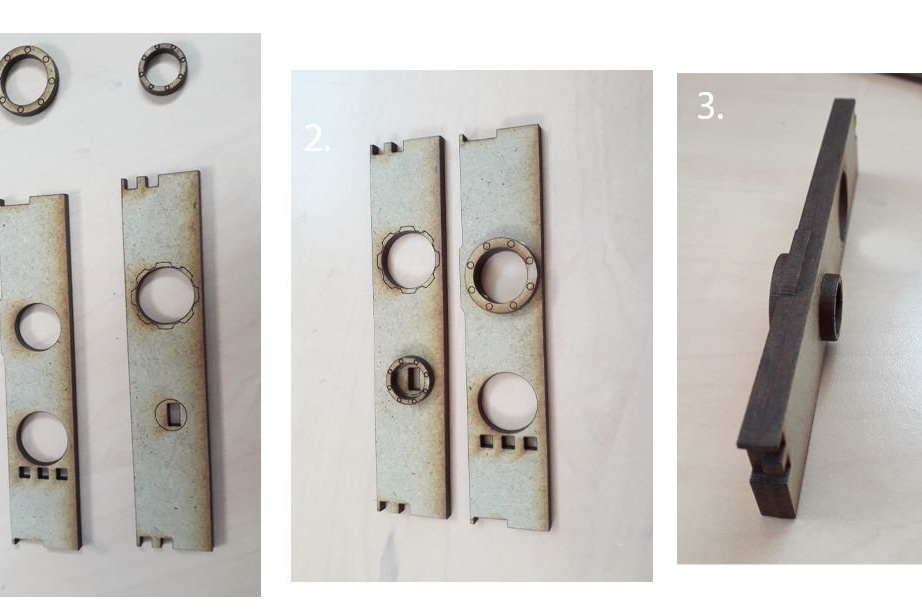
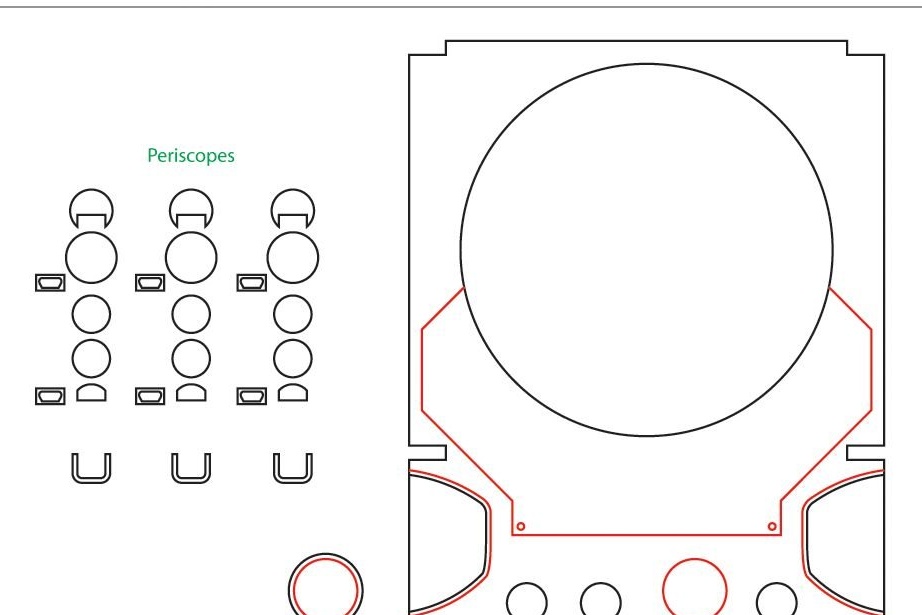
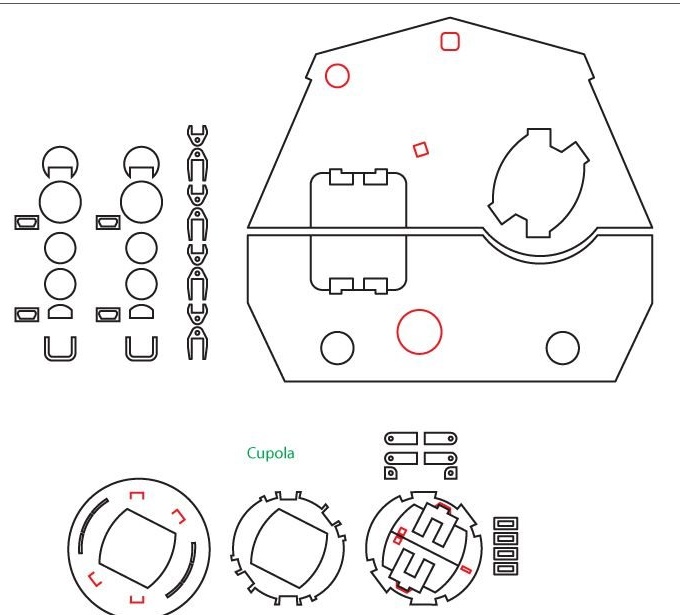
Quatre pas: Sostre i Periscopi
Aquesta part és una part desmuntable. Això es fa per tenir accés a l'interior. La palanca del periscopi s’instal·la a l’extrem del sostre. El periscopi es posa al terrat, però no s’hi enganxa.

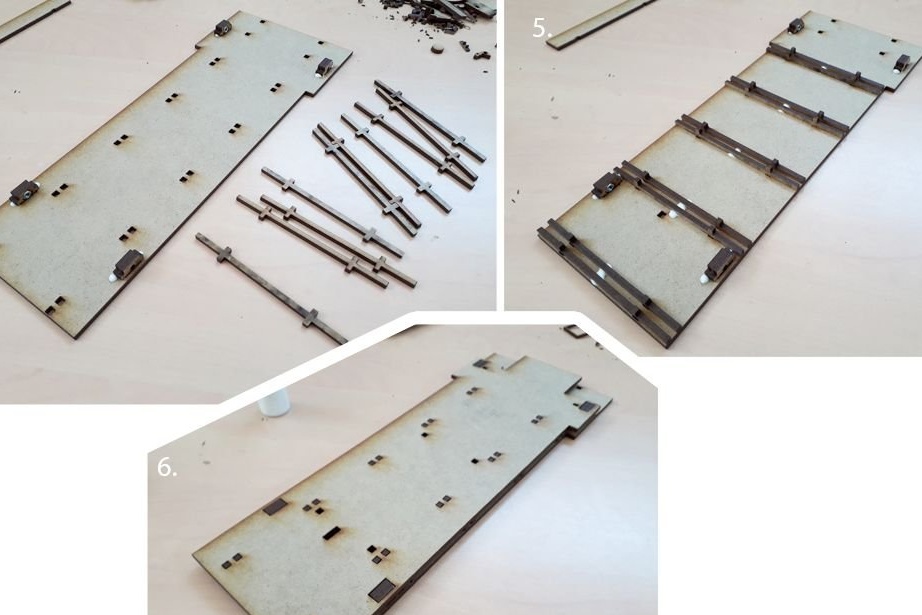
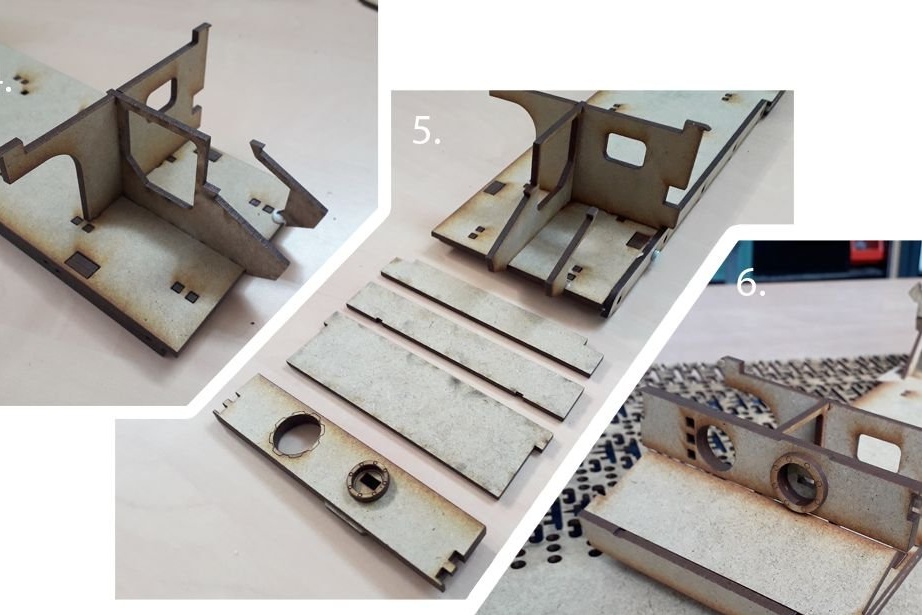
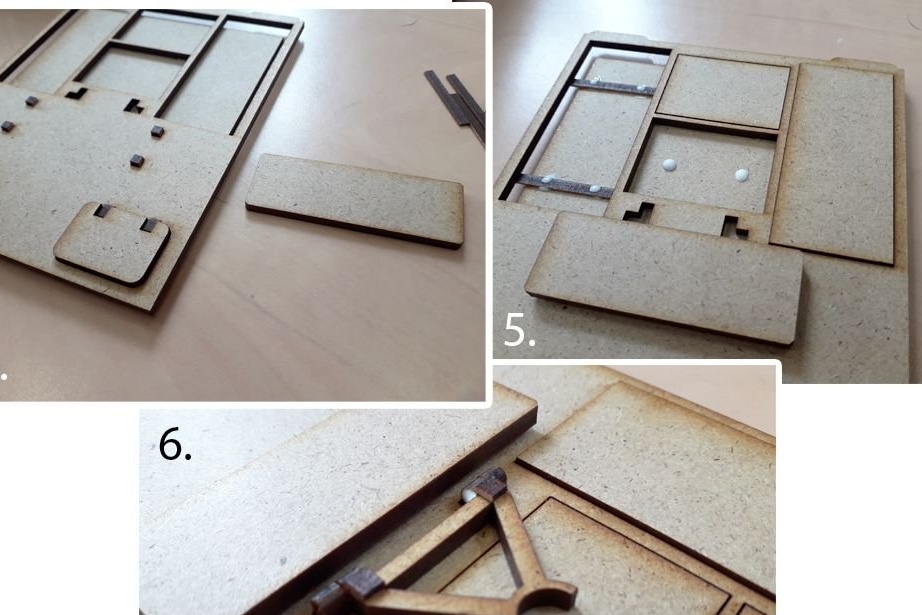
Cinquè pas: costat
Els braços de suspensió es munten a la paret lateral. Es cargola al doble fons amb cargols de 15 mm mitjançant 4 femelles que es van fixar en el primer pas.



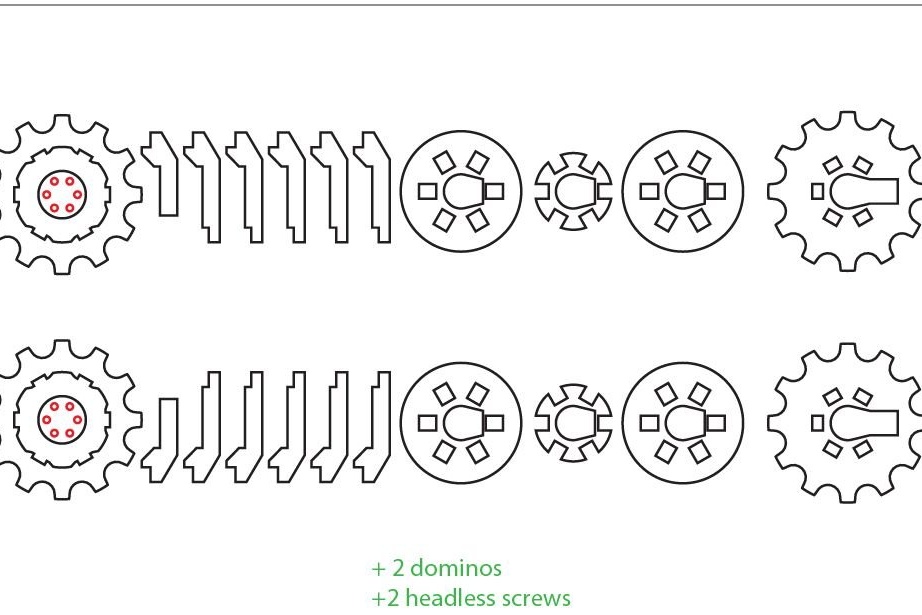
Pas sisè: Suspensió
Munta i instal·la components de suspensió. Tots els passos es reflecteixen detalladament a les fotografies. Apliqueu una mica de cola als extrems dels ressorts per fixar-los. A l'interior de les molles hi ha trossos de escuradents. D’aquesta manera s’evitarà que les fonts surtin.

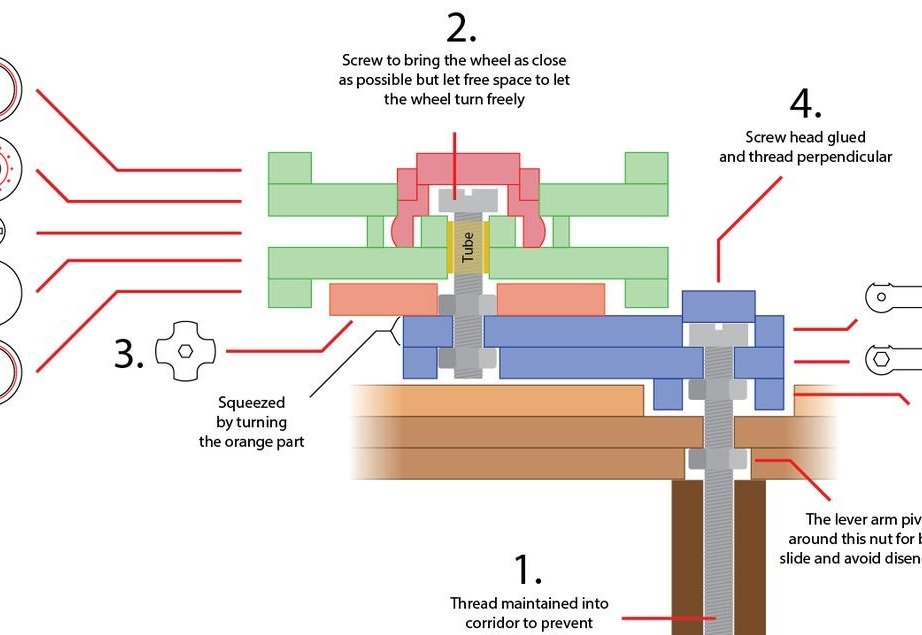
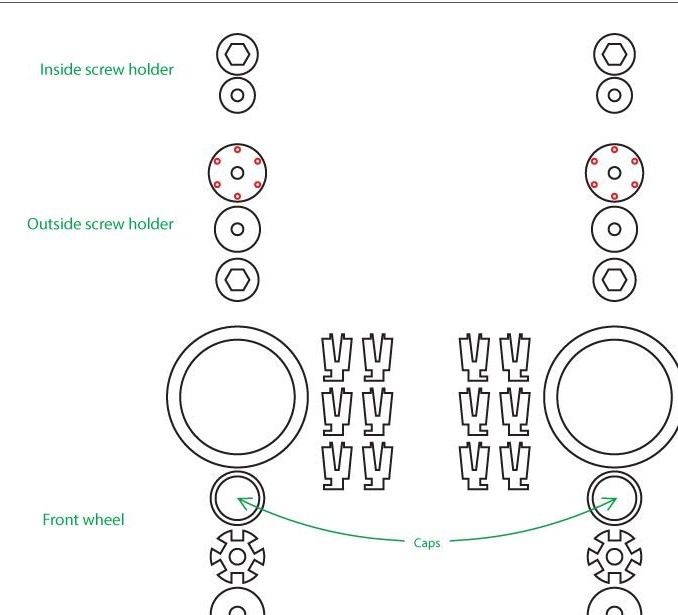
Munta i instal·la la roda inferior davantera. A l’eix de la roda s’instal·la un tub de llautó i un cargol de 20 mm. A continuació, el cub es tanca amb un endoll.

Munta i instal·la més aviat una roda.


Munta i instala rodes motrius. Aquestes rodes estaran connectades als motors instal·lats al dipòsit del dipòsit.
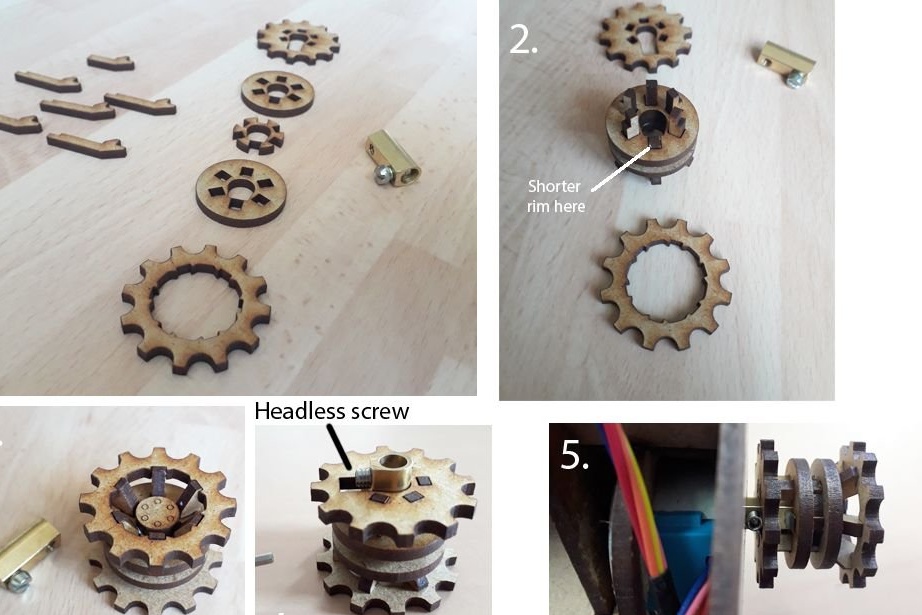
Instal·la els endolls a les rodes.

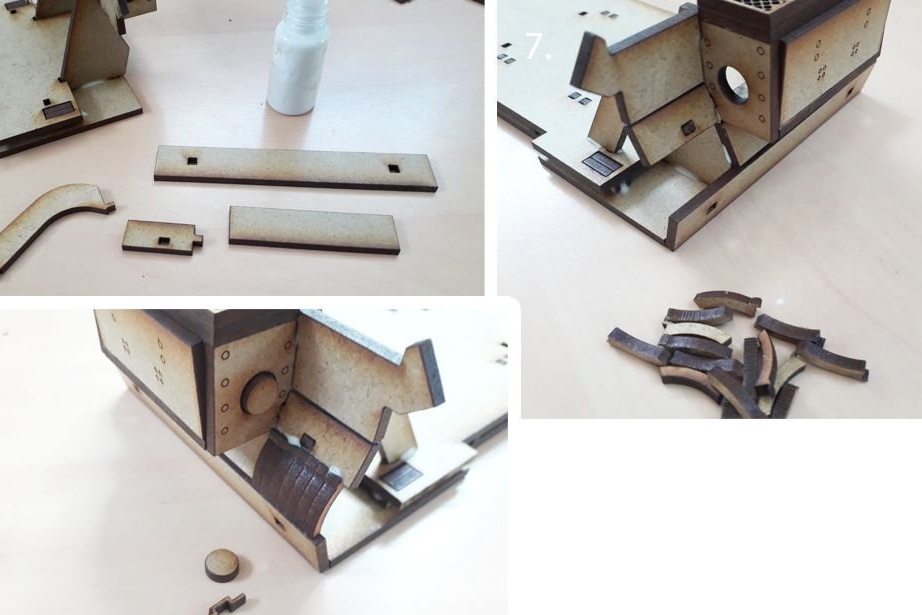
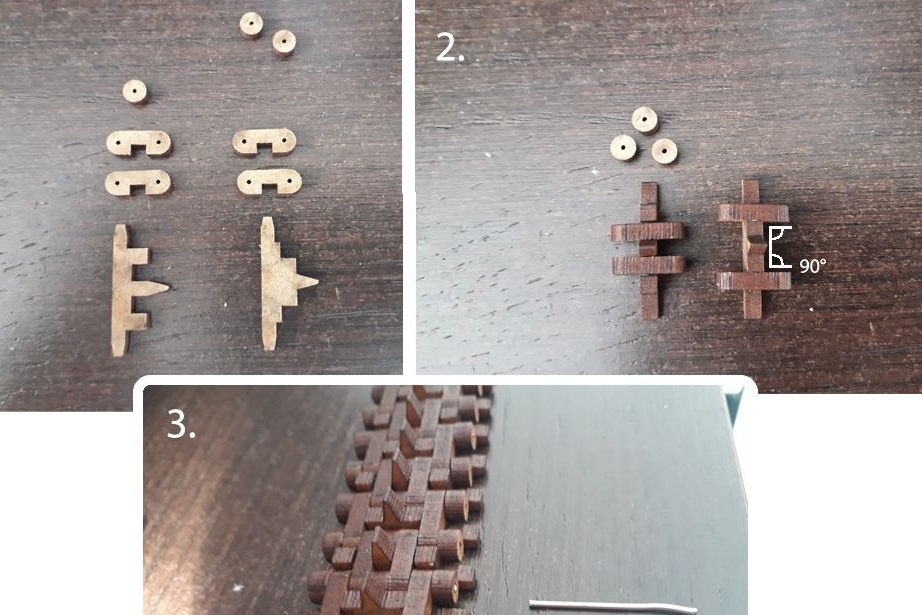
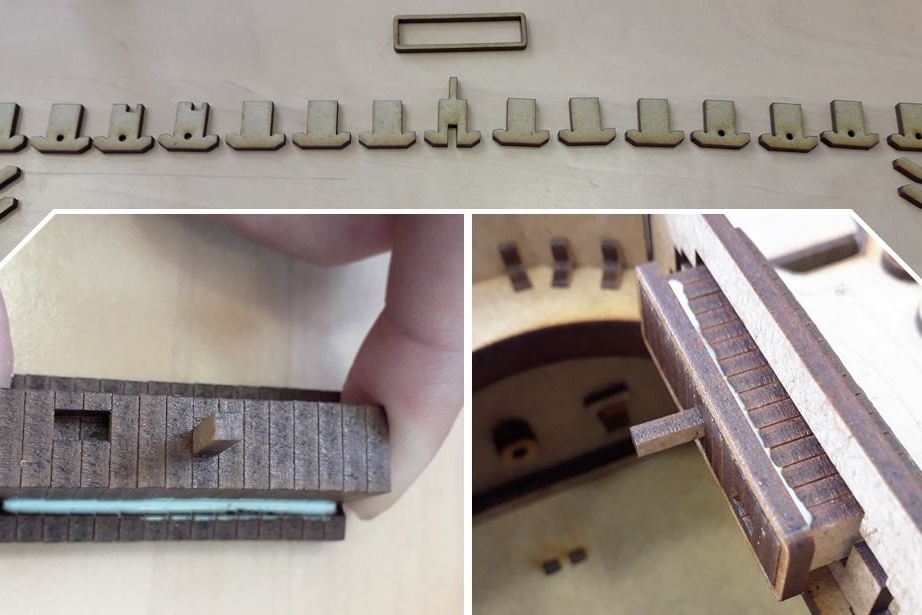
Setè pas: fer el seguiment
Recull pistes d’erugues. Les vies es fixen juntament amb un fil prim. Als costats del filferro es fixa amb taps.
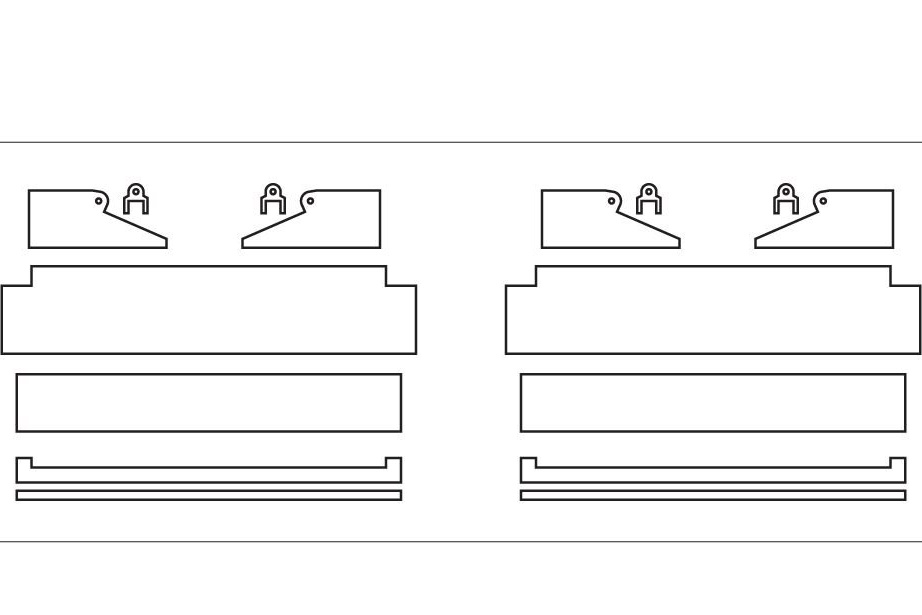
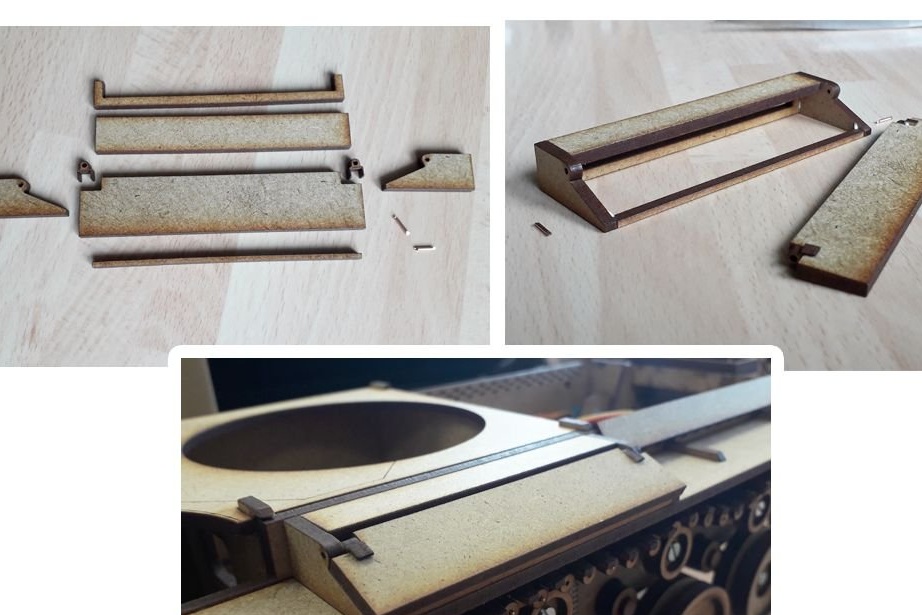
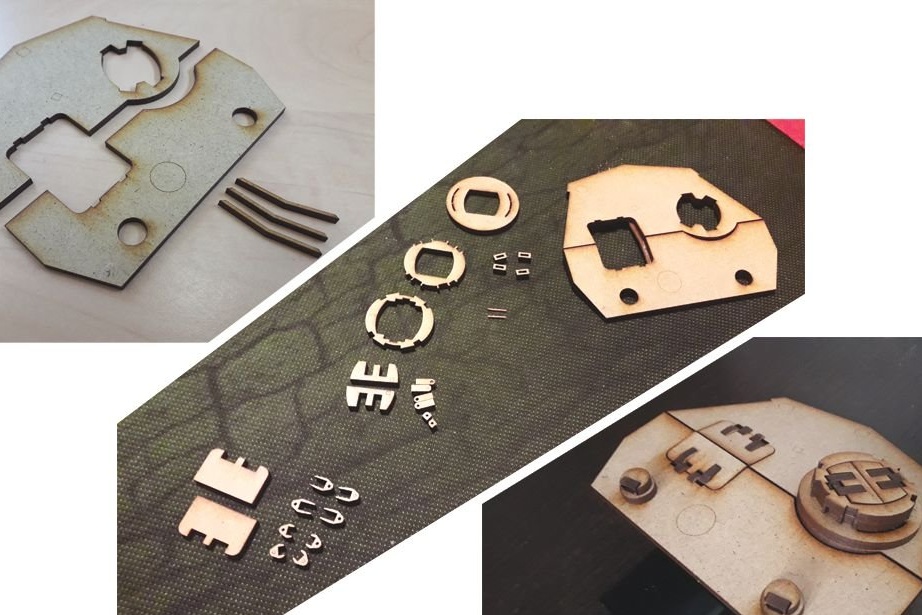
Pas vuit: Protecció de brutícia i calaix
Instal·la escuts. La part frontal de les solapes és mòbil i es pot aixecar.


Configura el calaix. Com a bucles, s’instal·len trossos de filferro.
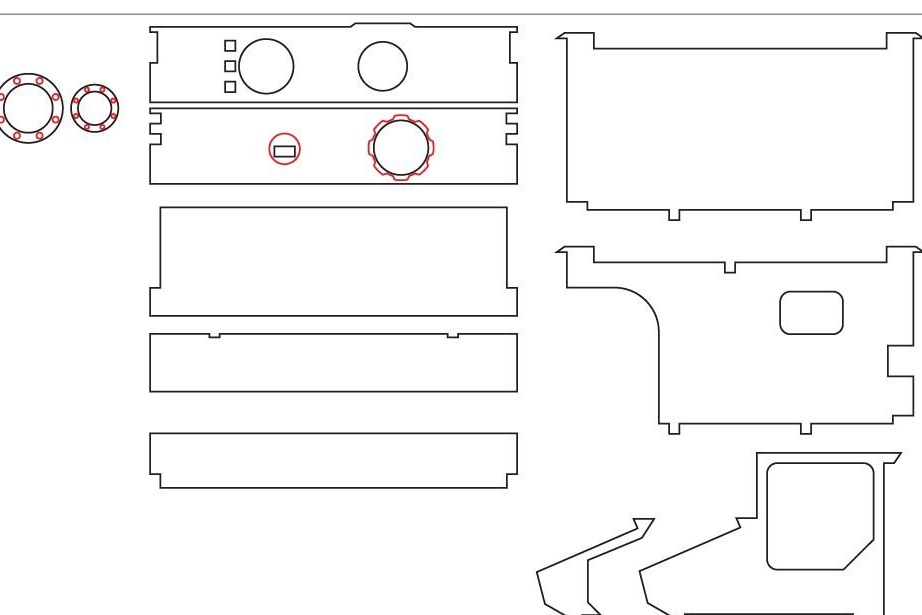
Nou Pas: el darrere
Aquesta part està situada darrere de la torre i abastarà el conjunt electrònica.
Pas deu: La torre
Reuneix la part superior de la torre i els murs laterals.
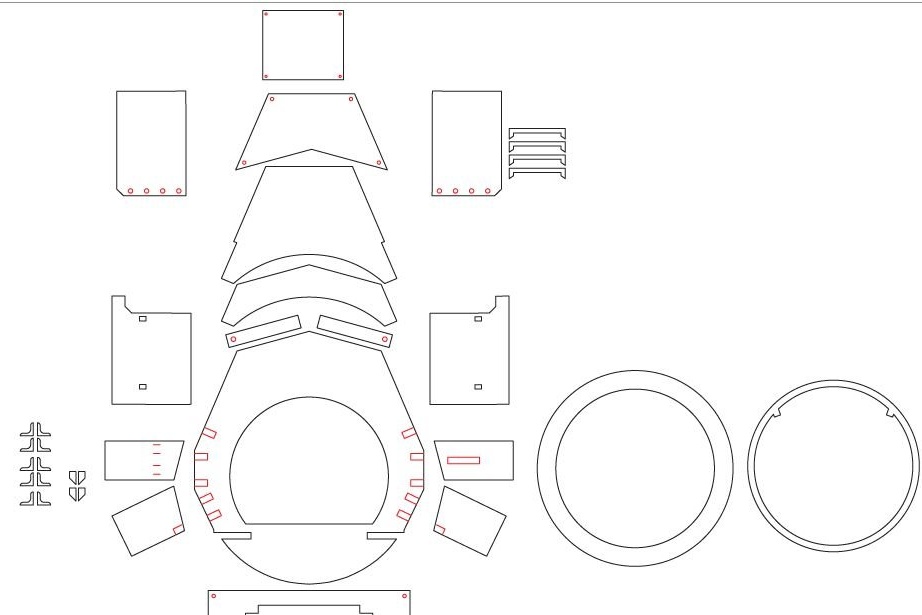
Enganxa el suport de la pistola.
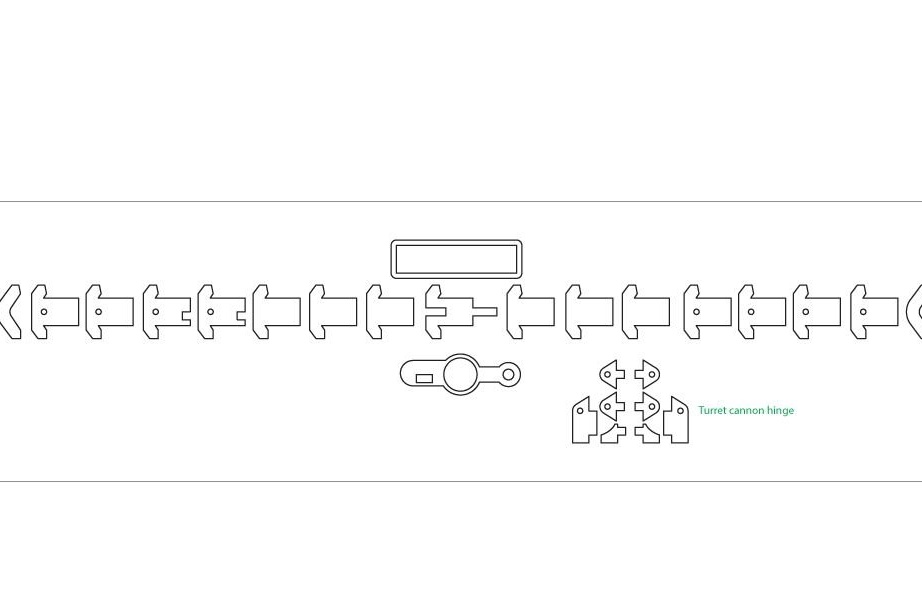
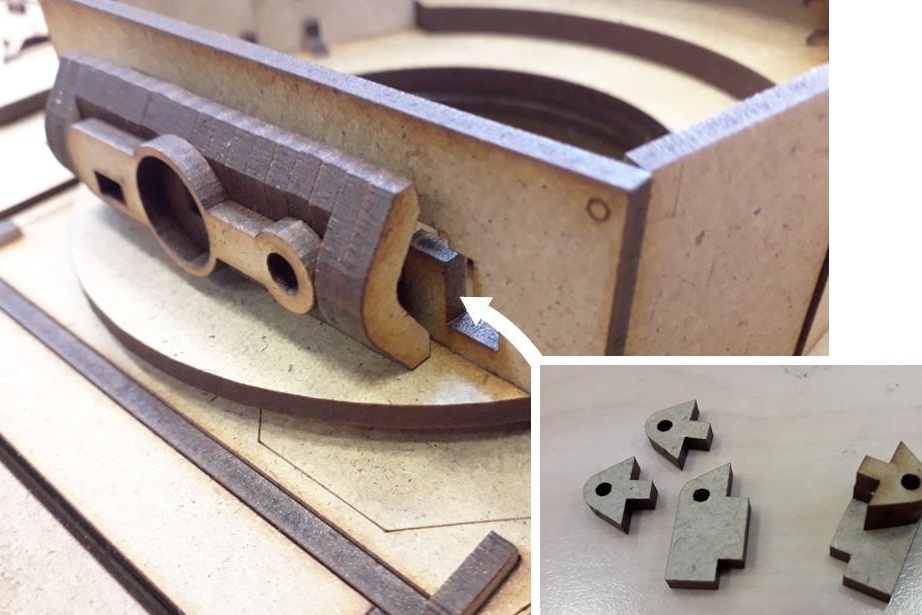
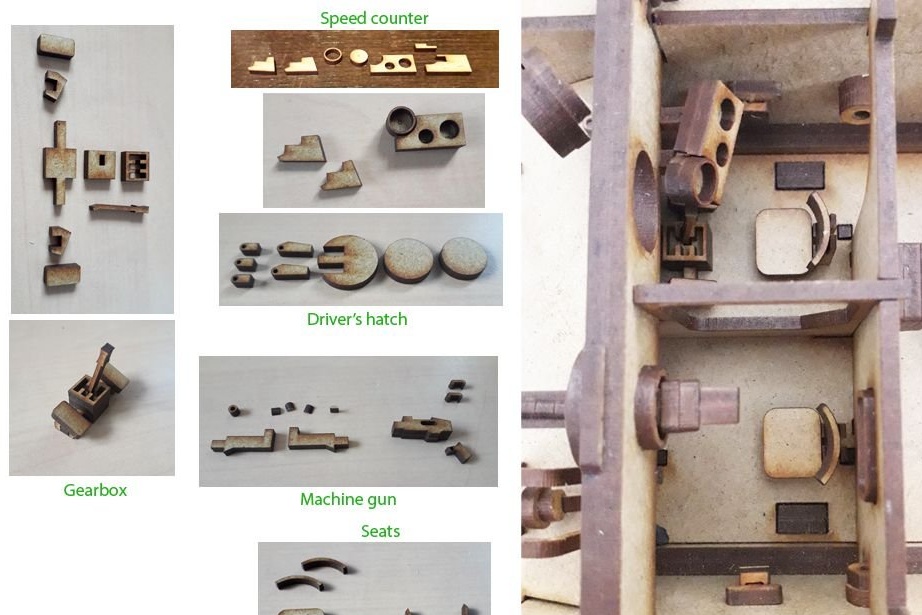
Estableix el mecanisme de muntatge intern i control de pistola.

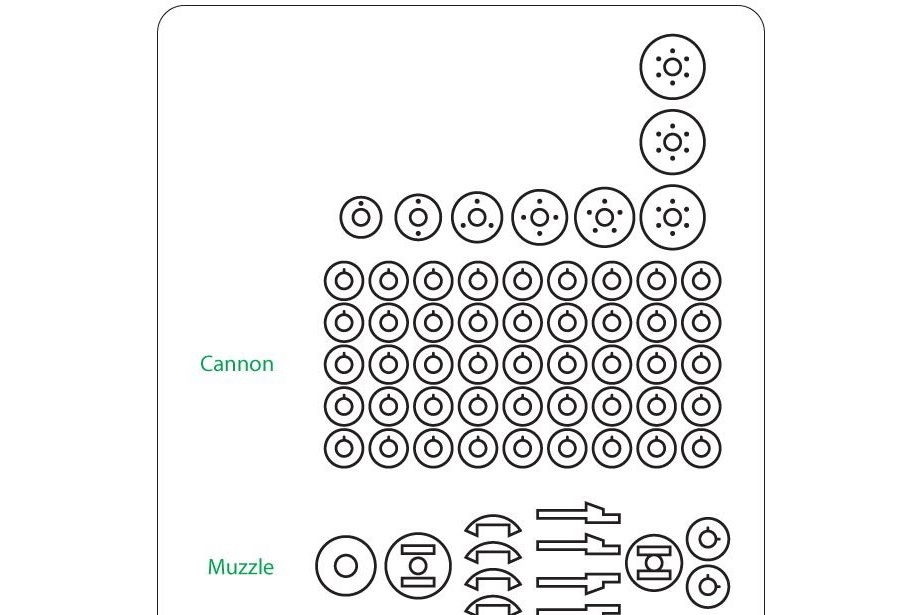
Onze pas: pistola
Recull una pistola, la pistola principal és una barra de metall. Els detalls restants s'hi posen de manifest.

Pas dotze: petits detalls
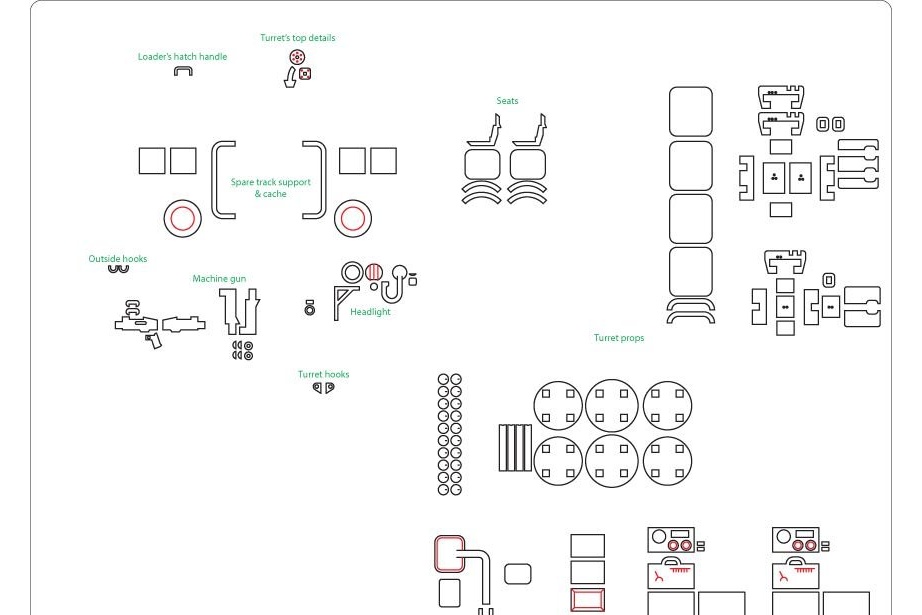
Assegura petites parts del dipòsit.
A l'interior, al costat esquerre, hi ha un seient i una metralladora, a l'exterior del canó d'una metralladora.
Dret al seient del conductor: seient, palanques de control i pedals, llençol.
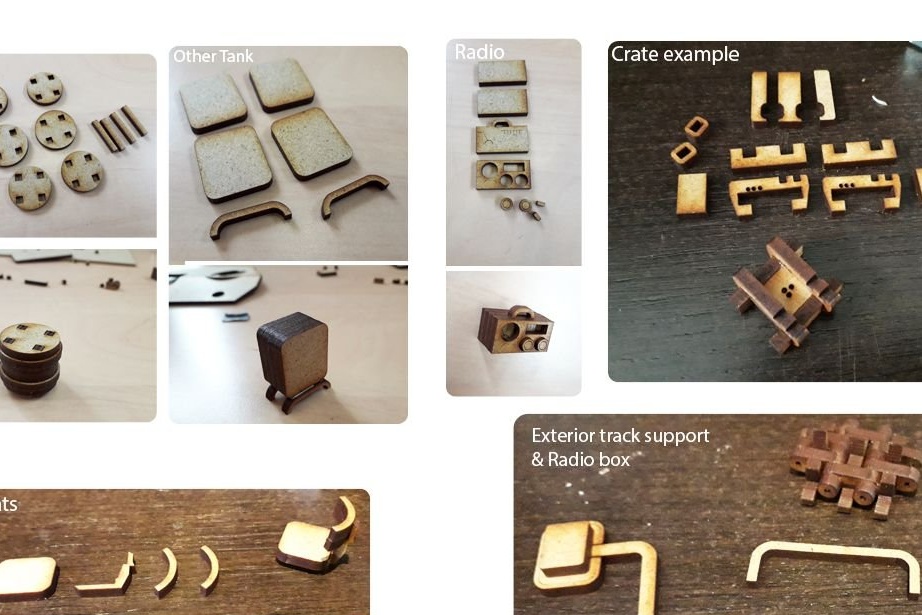
A l’exterior: ganxos, fars, caixes, municions, corda de filferro, etc.
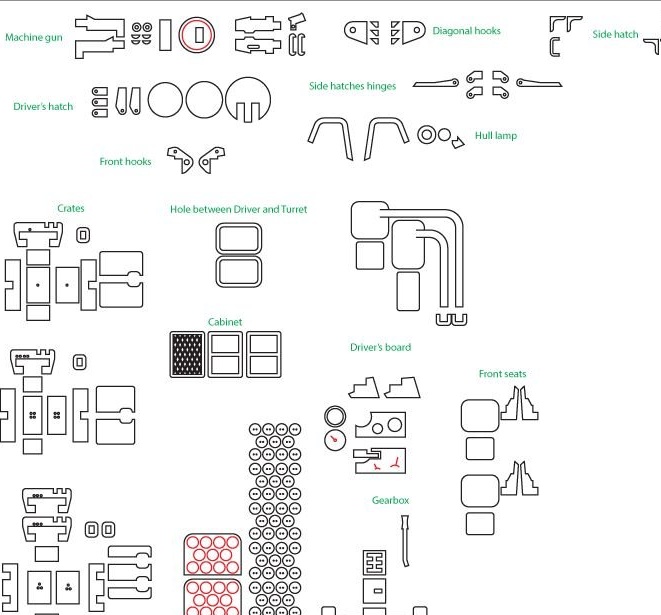

Un tanc sota l'aigua està fixat a la torre, un walkie-talkie dins de la torre.

Pas tretze: electrònica
Instal·la motors. Realitza la instal·lació de la part electrònica segons el diagrama.
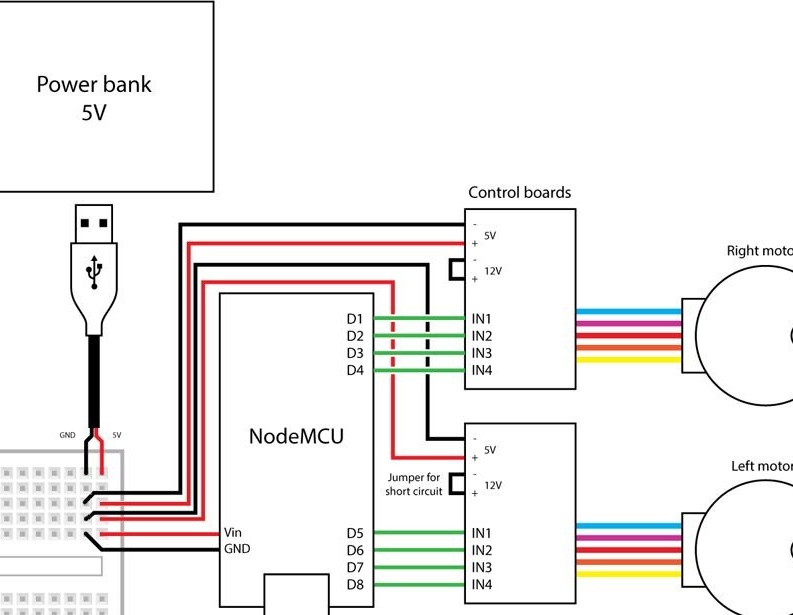

Per al control sense fils, he escollit el controlador NodeMCU. El model es controla mitjançant NodeMCU i l’aplicació Blynk (disponible a Android / iOS). Aquesta aplicació proporciona un HUD totalment personalitzable per controlar des de qualsevol Arduino o telèfon iOS mitjançant WiFi.
Així, després d’instal·lar l’aplicació, el primer que cal fer és crear un compte.
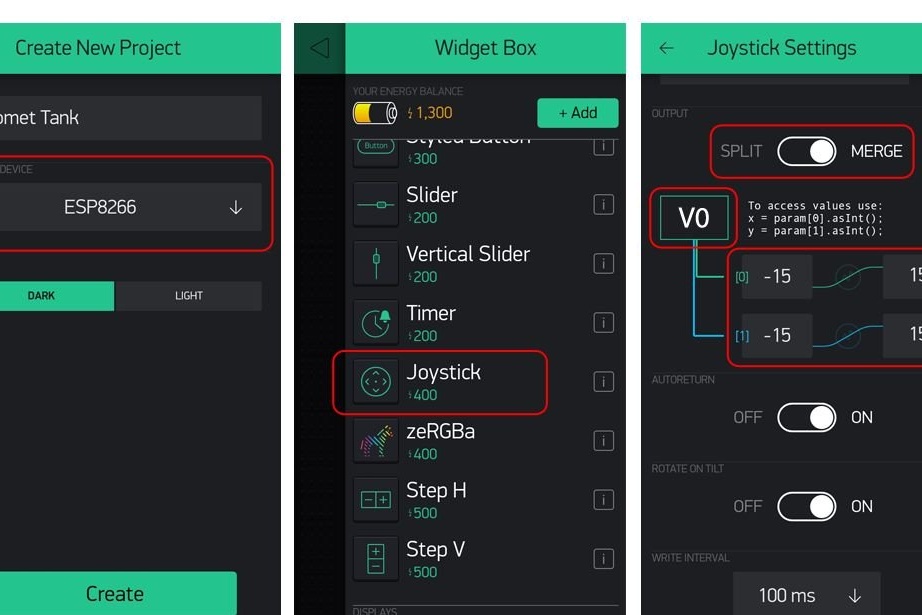
Creeu un nou projecte i assigneu ESP8266 (xip NodeMCU) com a microcontrolador i configureu el mode WiFi.
Tan bon punt veieu el vostre HUD, creeu un joystick. Envieu la informació del joystick al pin virtual V0 del node.
Un cop hàgiu creat un joystick, feu clic sobre ell per obrir la seva configuració. A les posicions X i Y, fixeu l’interval de -15 a 15.
Instal·leu biblioteques.
Primer, descarregueu la biblioteca Stepper2 aquí: https://github.com/udivankin/Stepper2
Aquesta biblioteca és una bona opció per a motors pas a pas barats, com el que utilitzava el mestre. Gestiona millor les fases del motor i proporciona un millor parell. Després de descarregar el fitxer .zip, instal·leu-lo des del programari Arduino: Sketch> Include Library> Add .ZIP Library ... i seleccioneu-lo.
Aleshores, si mai no heu parlat anteriorment a NodeMCU, necessiteu un equip que el reconegui. L'Arduino IDE té un gestor de placa on hi ha instal·lats els controladors correctes.
Copieu la línia següent:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonObriu la configuració i enganxeu-les als URL. Deseu la configuració i aneu al gestor del controlador a Eines> Tauler> Administrador de taules. La targeta ESP8266 ha d’estar present al final de la llista. L’assistent va triar la versió 2.5.0 amb l’IDE del 1.8.9.
També necessiteu la biblioteca de Blynk, que es pot trobar a Sketch> Include Library> Gestiona les biblioteques ... i, a continuació, busqueu Blynk al camp de cerca.
Vés a la configuració del projecte i envia un testimoni a la teva adreça, que és una gran cadena que permet al telèfon reconèixer NodeMCU quan aquest està activat. Copieu el testimoni del vostre missatge de correu recent rebut i enganxeu-lo a la matriu d'autor.
Ara podeu instal·lar el firmware.
Comet.ino
Tot està a punt, ara podeu gaudir de la vostra feina.