


En aquest article, l’assistent ens mostrarà com va fer l’helicòpter Lego 60193 de l’Àrtic Transport de l’Àrtic el model quadrocòpter. La tasca principal en la fabricació del quadrocòpter, a més de les qualitats de vol, era estalviar el màxim de peces originals possibles.
Vegem un vídeo breu que demostra el funcionament del quadrocòpter.
Així, per a la fabricació d’un quadrocòpter, el mestre va utilitzar el següent
Eines i materials:
-LEGO Helicopter Arctic City - 60193:
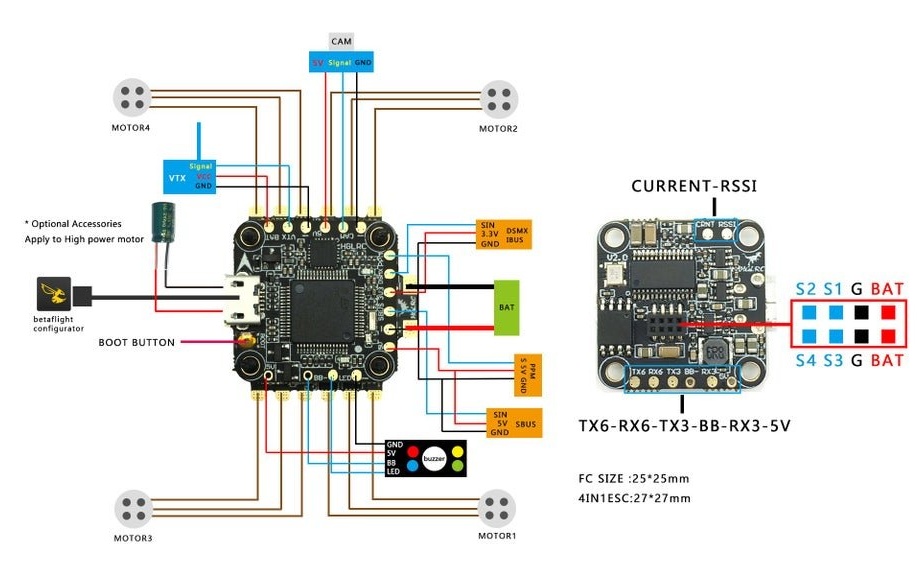
- Controlador i ESC 20x20 mm, per exemple, HGLRC XJB F428 Micro F4 AIO OSD;
- Motors sense escombretes - 4 peces;
Hèlice
-Bateria de 950 mAh;
-Conectors;
-Wire;
-Mòdul de ràdio (transmissor i receptor);
-Atxulladors;
-Noix;
-Soldador de ferro;
-Pistola de vidre;
- tornavís;
-Drill;
Primer pas: Lego Build
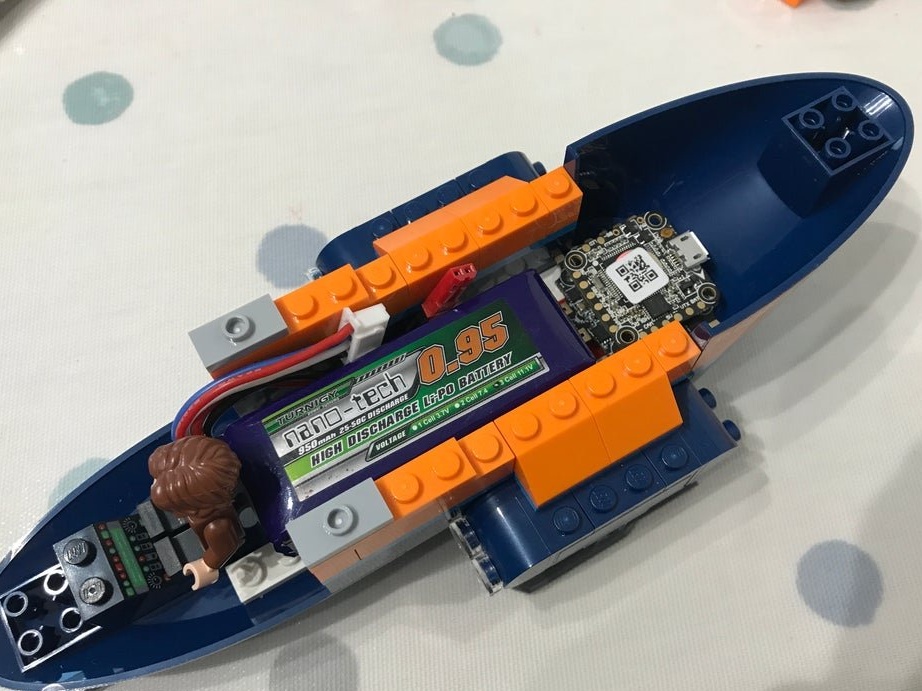
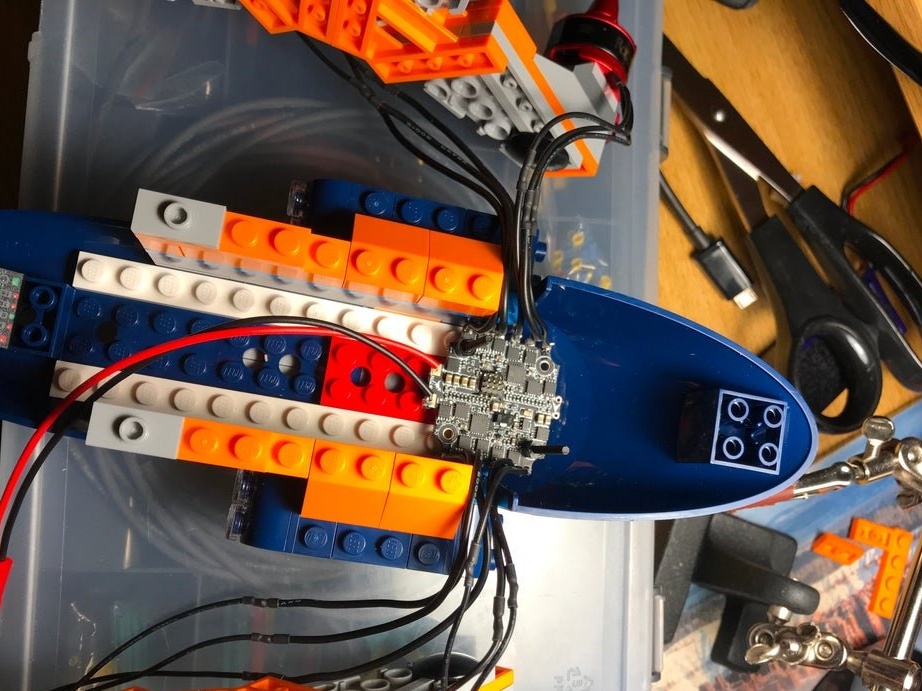
Primer, el mestre recull el LEGO-Àrtic. Llavors el model es desmunta parcialment. Al seu interior cal col·locar la bateria i el controlador, observant l'equilibri del model.


Segon segon: Muntatge del motor
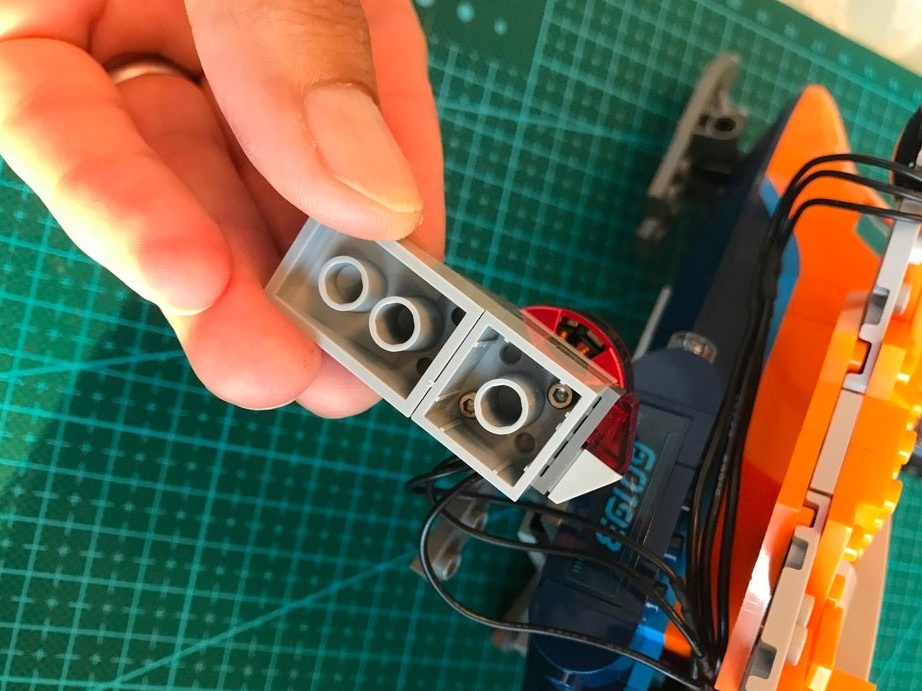
Els forats de muntatge del motor sense escombretes 1806 estàndard són pràcticament els mateixos que els pals de la placa estàndard LEGO 2x2. Cada muntatge "motor" del quadrocòpter té una rajola de 2x2 de color gris fosc (LEGO 3022) i una rajola de color gris clar 2x2 amb un passador vertical (LEGO 2460), que normalment es manté als cubs d'una hèlice LEGO a la part superior.
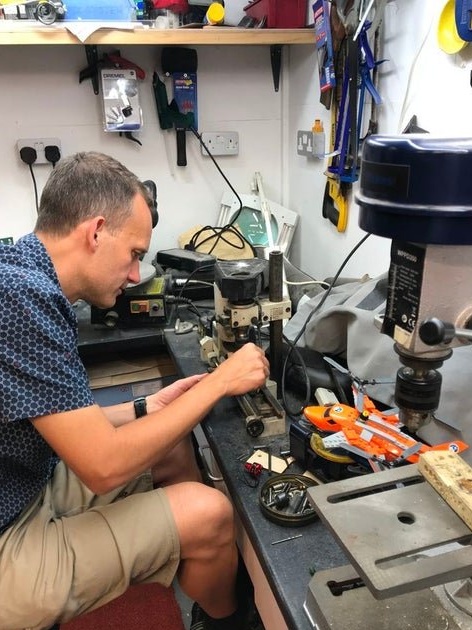
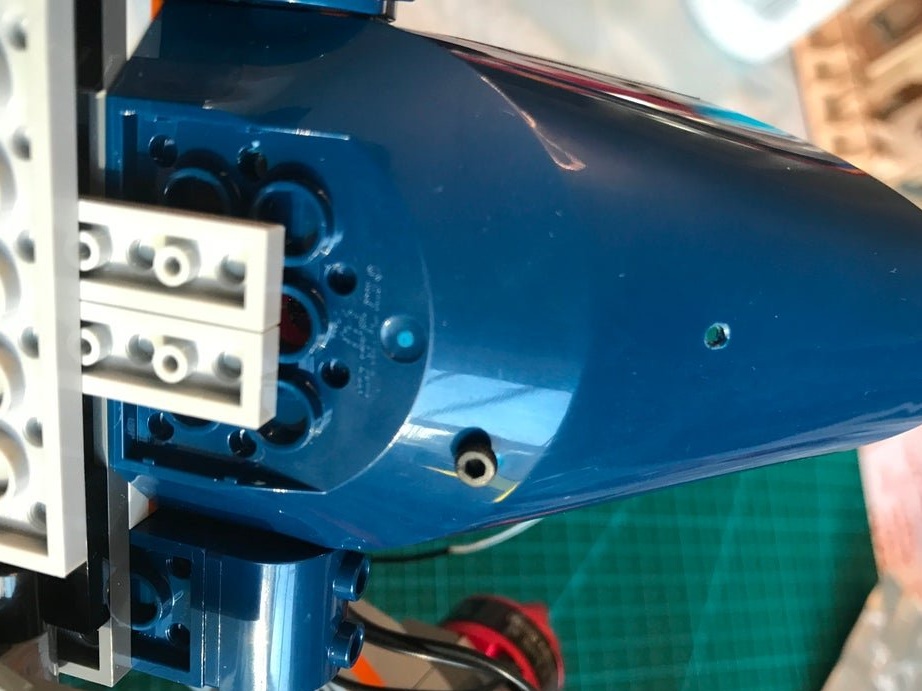
El mestre perfora els forats de muntatge. Als motors, al centre, hi ha una marea baixa. Es fa un forat sota del forat al centre de la rajola. Segura motors.








Tercer pas: Espatlles
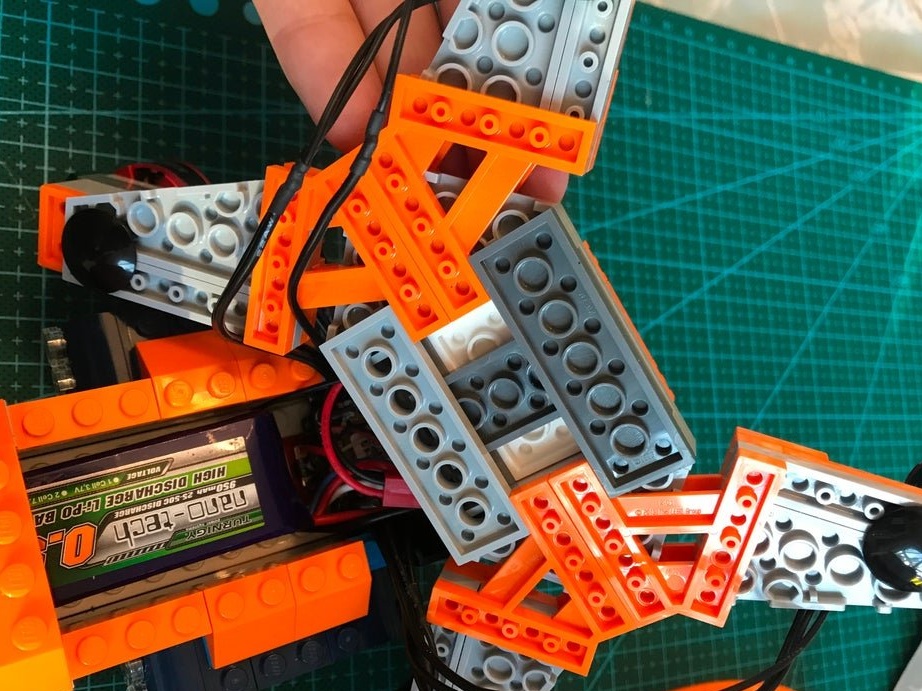
Arranjant les "espatlles" del quadrocòpter, podeu canviar lleugerament la disposició per proporcionar una disposició més àmplia o més estreta dels motors i la ubicació dels cargols els uns dels altres.
El conjunt estàndard LEGO (primera foto) té “espatlles” i motors situats amples (horitzontalment) amb una superposició de cargol força gran. El mestre remou les "espatlles" i llença el motor i, en conseqüència, els cargols.



Quatre pas: electrònica
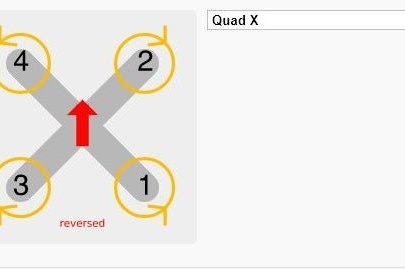
Segons l’esquema, instal·la electrònica. La primera foto mostra un esquema de la direcció de gir dels motors. El sentit de rotació també es pot canviar a la fase de programació.

Un cop finalitzada la instal·lació i abans de connectar la bateria, l’assistent comprova les connexions per evitar que es trenqui o hagi curtcircuit.
Quan enceneu l’alimentació, haureu de veure les llums del controlador de vol i uns pitjos de l’ESC.
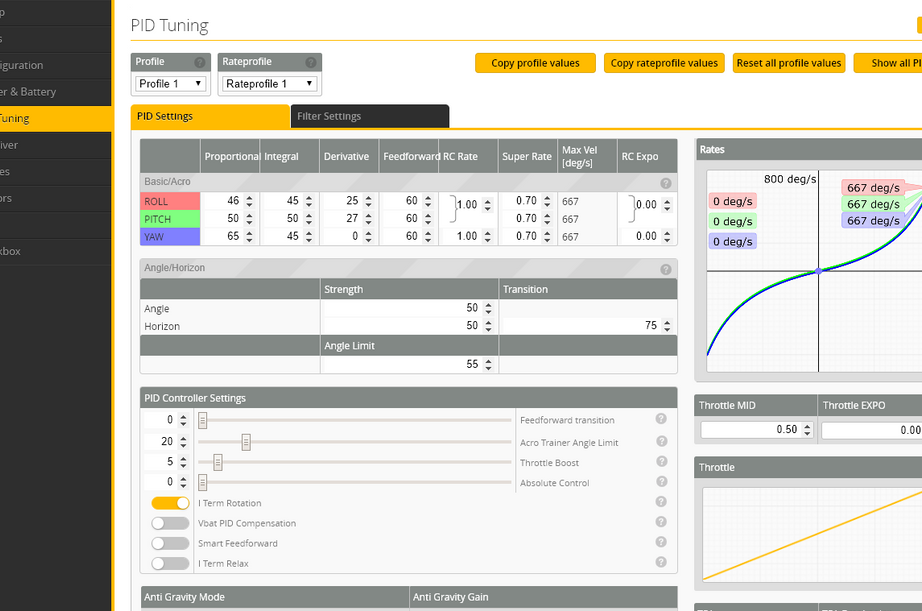
Cinquè pas: Configuració
Ara que tot està connectat, és hora de configurar el controlador.Això significa descarregar el programari (programari incrustat) que realitza la tasca de descodificar senyals de control del transmissor RC, processar el senyal d’entrada del sensor (accelerador, giroscopis) i proporcionar senyals de control perquè l’ESC giri els motors a una velocitat determinada.
Retireu les hèlixs per seguretat. No és necessària una bateria per als primers passos de configuració, només l’energia USB.
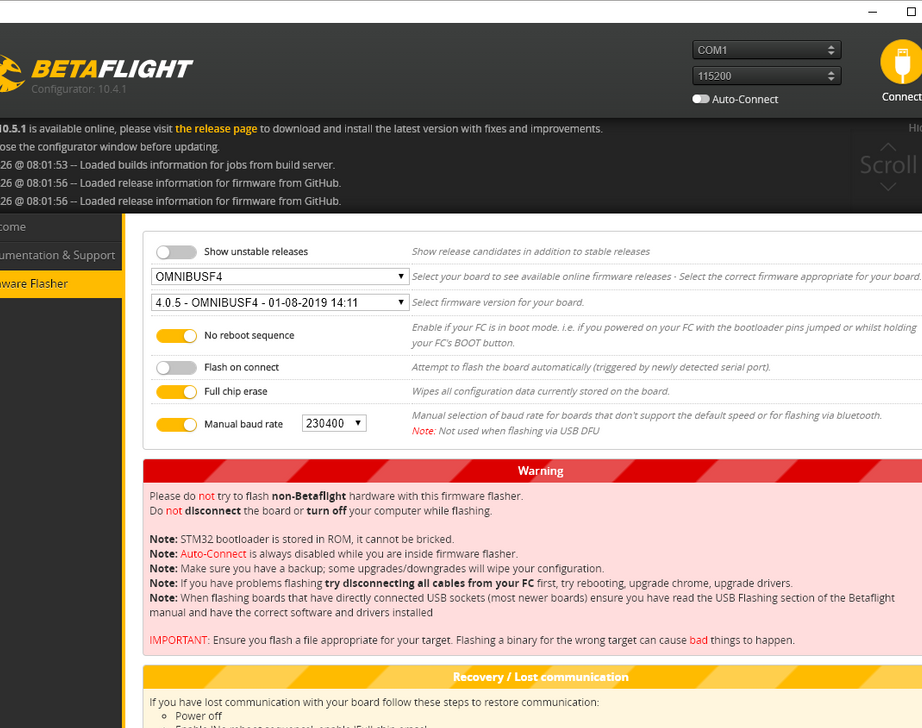
Descarrega Beta Configurator
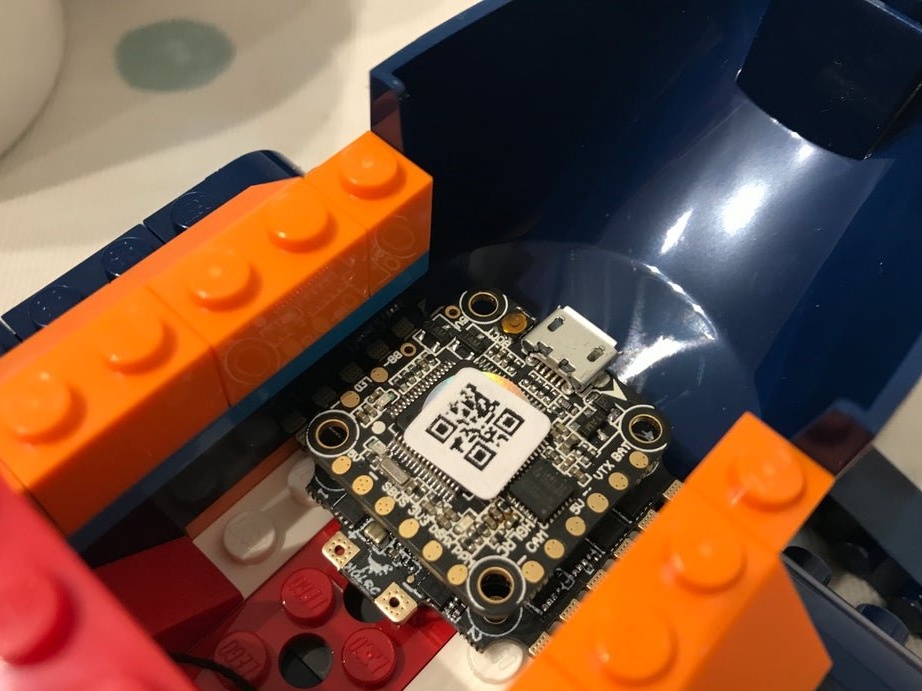
Connecteu el cable micro USB al controlador de vol. Tingueu en compte que això pot ser més fàcil de fer si el controlador no està cargolat al xassís.
Baixeu i pengeu el firmware adequat per al controlador de vol.
betaflight-settings-legoquad.txt
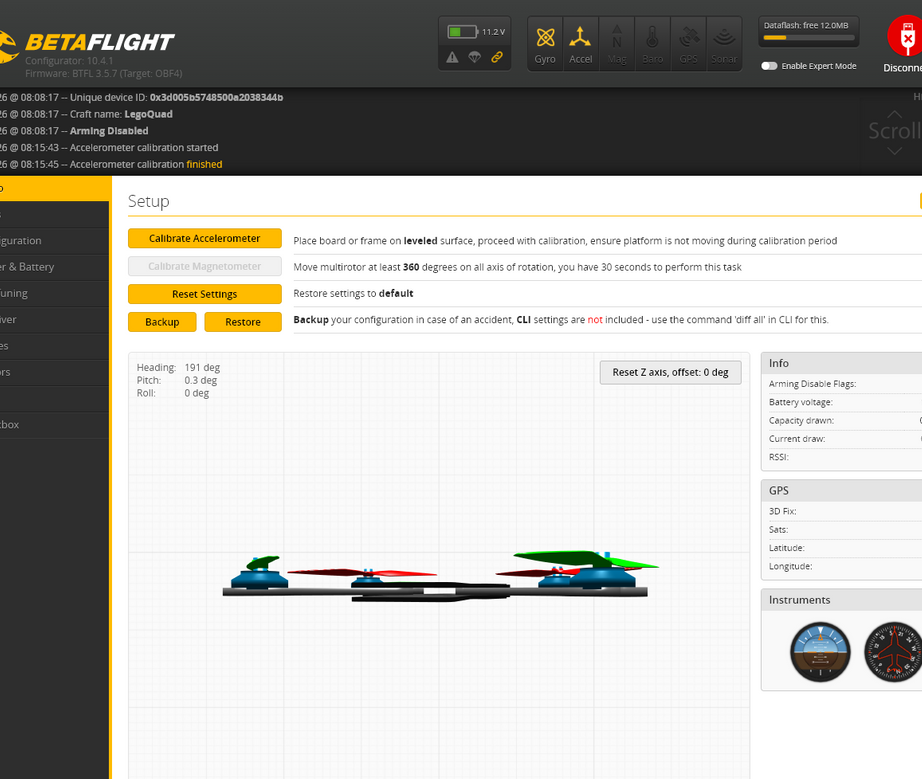
Feu clic al botó "Connectar" i configureu la configuració següent:
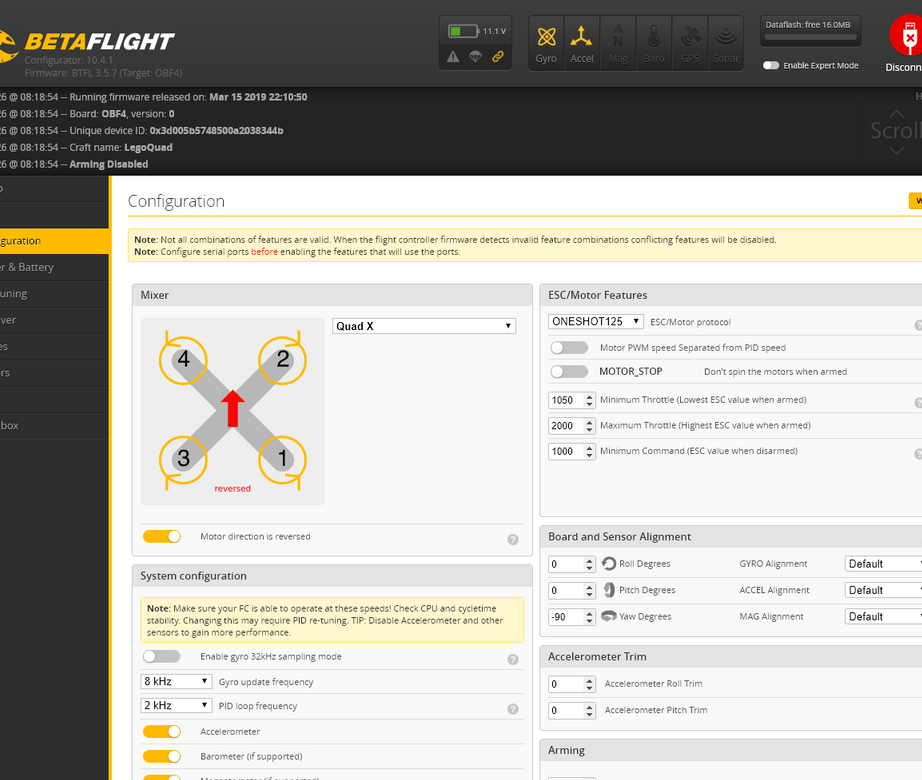
1. Configuració - model de calibració de motors
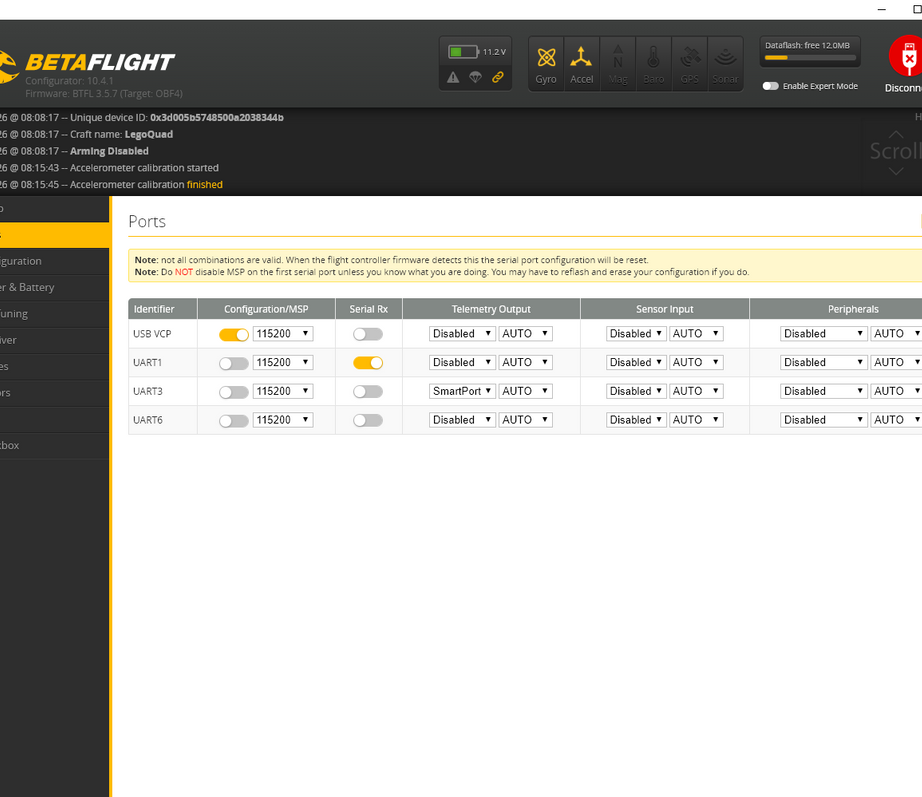
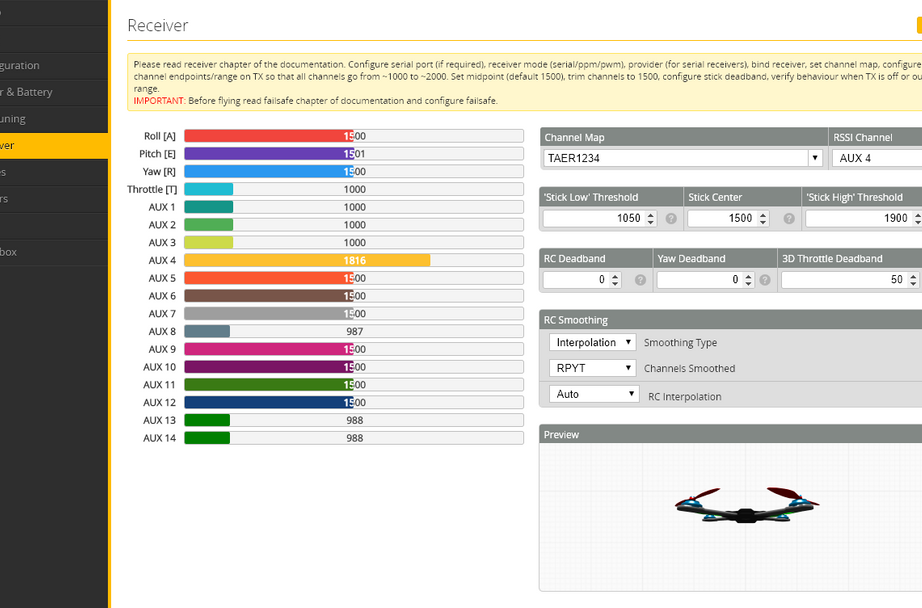
2. Especifiqueu els ports - UART1 - Serial RX per connectar el receptor SBUS RC
3. Desar i reiniciar
4. Establiu una connexió entre el receptor i l'emissor
5. Sobrecàrrega
6. El valor del mestre PID es defineix en 250
7 Connecteu la bateria
8. Ajusteu la tensió.
9. Assegureu-vos que la visualització del canal i la direcció del control siguin correctes, quan tot estigui configurat, la imatge del model de quadcopòter a la cantonada inferior dreta s'ha de moure en totes les direccions correctes quan mueveu els joysticks al controlador RC.
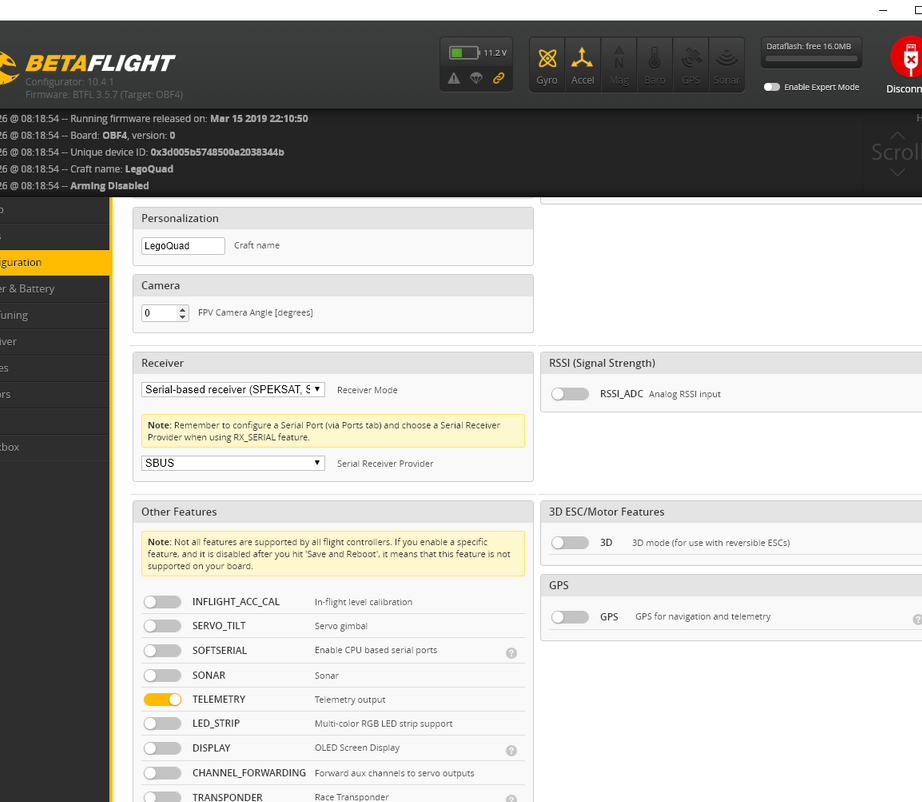
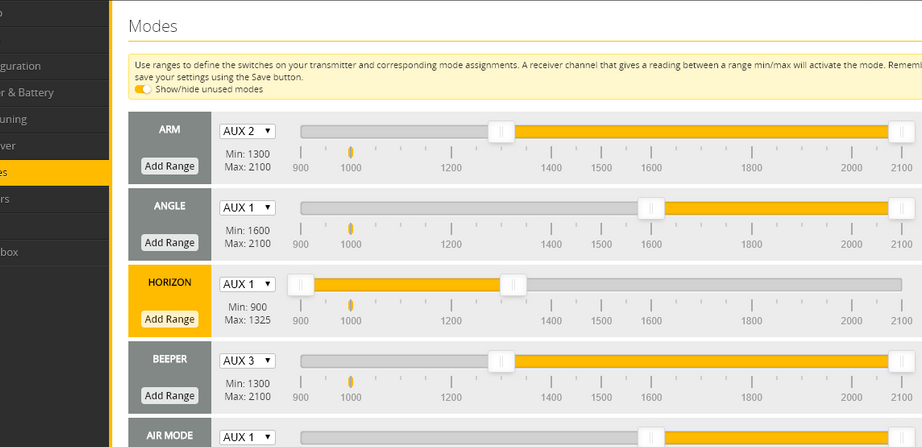
Configura els modes.
Activat / desactivat ARM
HORIZON autonivellant / ACRO per a vol tradicional en FPV
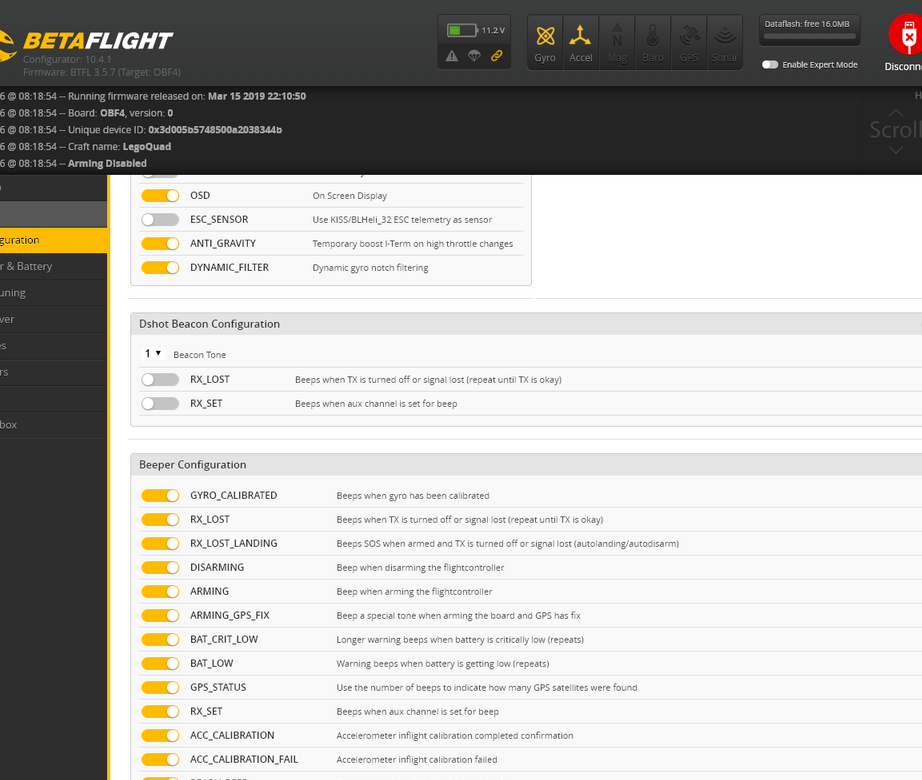
BEEPER - Útil si perdeu el model a l’herba alta o als arbustos.
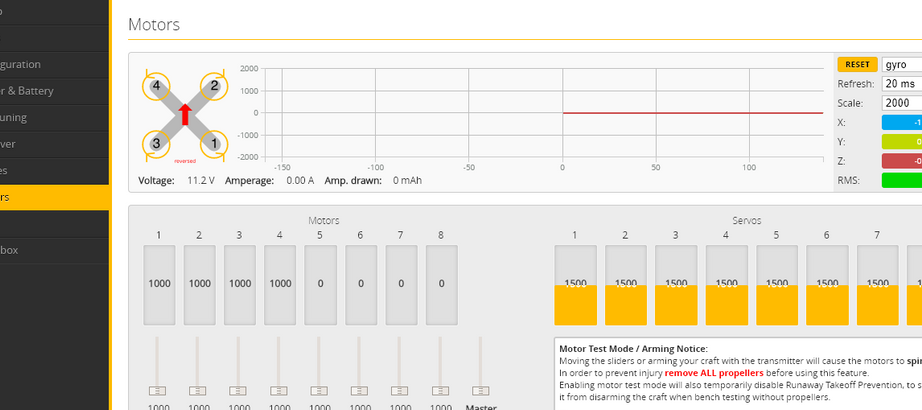
Pestanya “Motors”: utilitzeu aquesta opció per comprovar cada motor per separat i, el que és important, marcar el sentit de gir de cadascun d’ells.
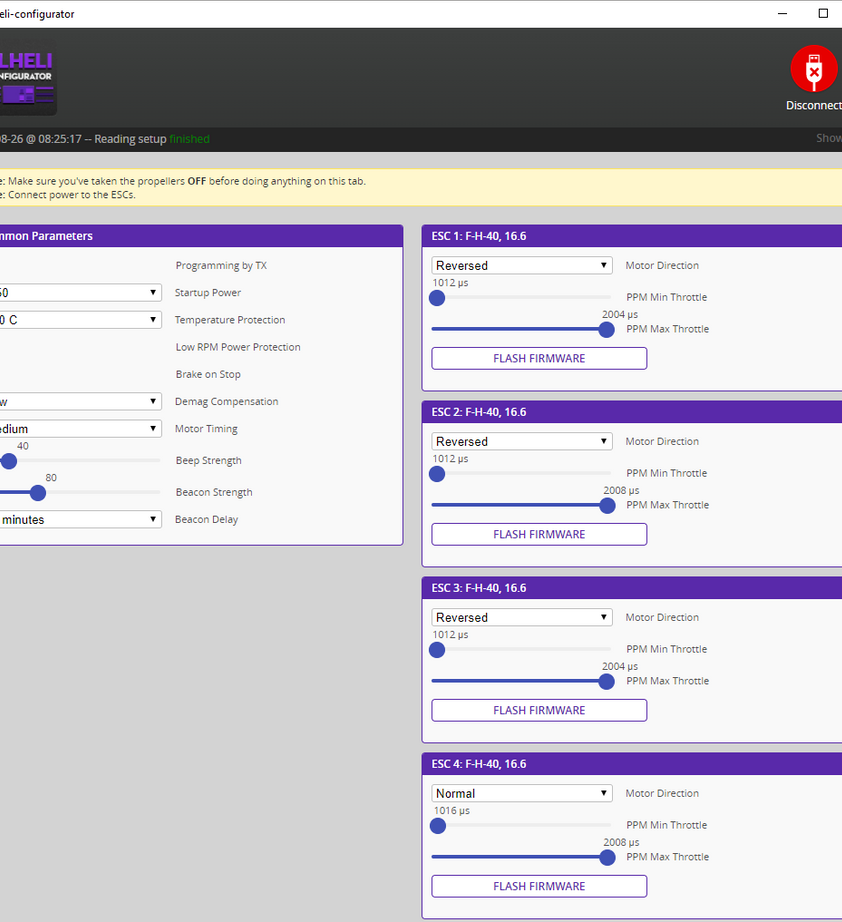
Corregiu qualsevol direcció de rotació errònia amb el configurador BLHELI
Després de tots aquests passos, podeu desconnectar l'USB i la bateria i, després, encendre'l i comprovar que tot funciona:
Engegueu el transmissor i engegueu-lo
Connecteu la bateria i munteu el quadrocòpter a una superfície plana
Engegueu l’interruptor ARM i els motors han de començar a girar a una velocitat baixa.
Comproveu l’accelerador mentre augmenteu la velocitat
En mode horitzontal, intenteu inclinar el quadrocòpter i assegureu-vos que els motors reaccionin adequadament, per exemple, inclineu-lo cap endavant i els motors davanters s’acceleraran.

Pas sisè: Muntatge final
Pràcticament tota l’estructura del estoig es manté amb panys de muntatge. El mestre només utilitza adhesiu de fusió calenta per muntar els motors.


Tot està a punt i podeu provar.



