
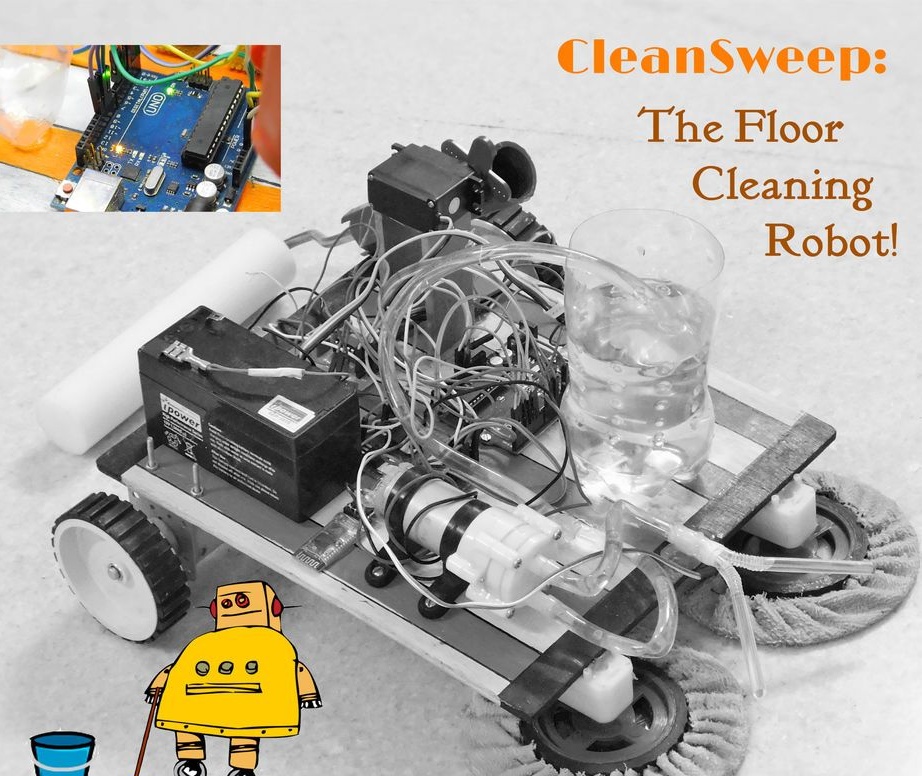
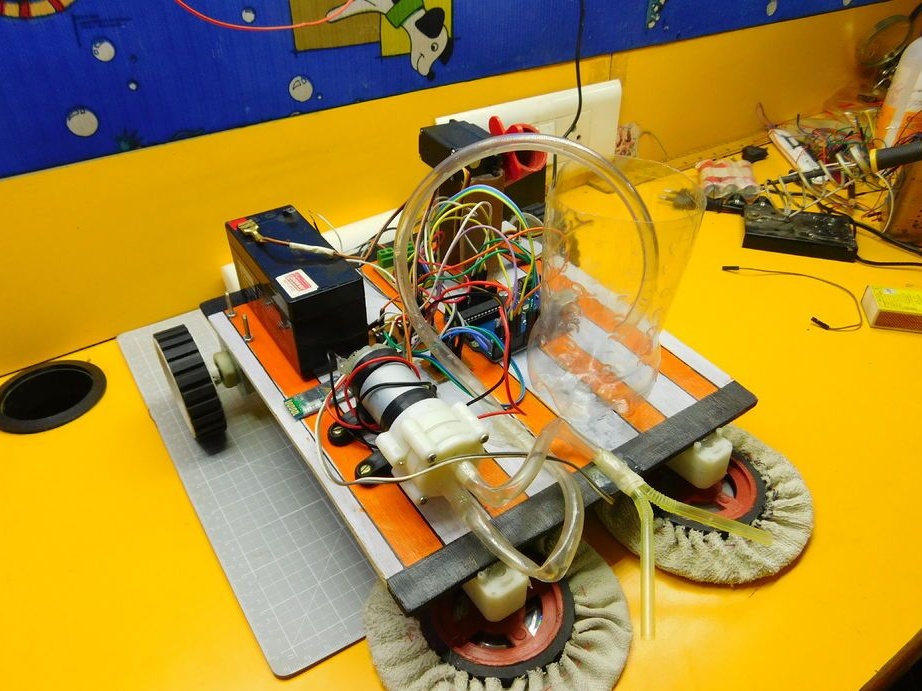


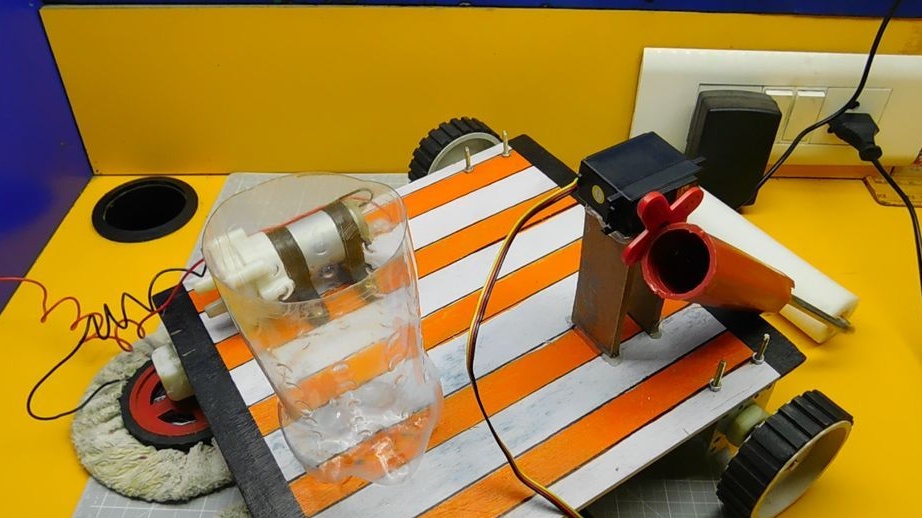
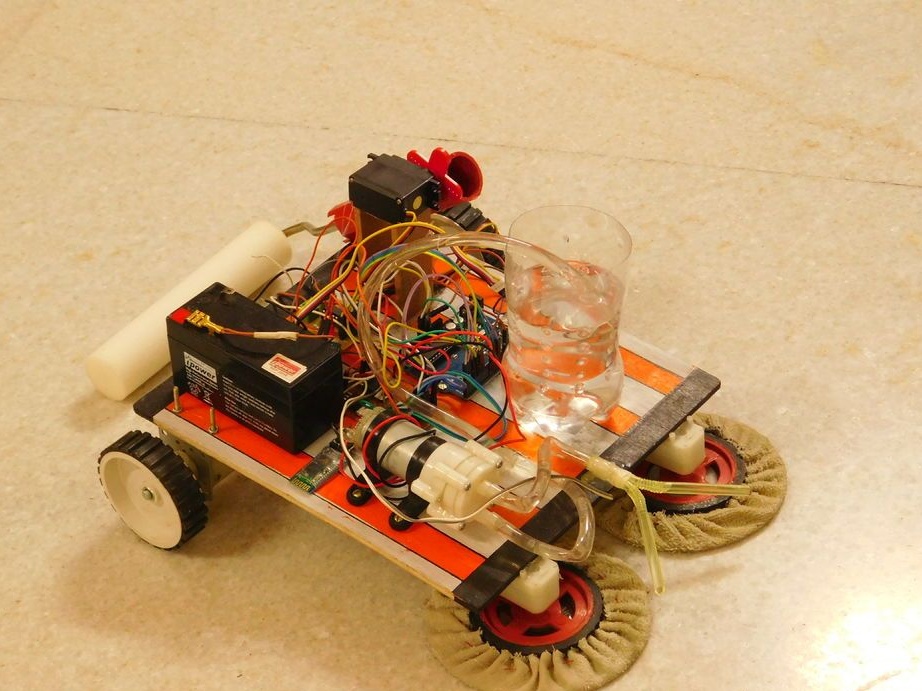
El robotLa recol·lectora té en el seu arsenal dos pinzells giratoris muntats a la part davantera de l’eix del motor. La caixa de canvis gira a una velocitat de 75 rpm. El robot té un dipòsit d'aigua a bord. Un corró es fixa a la part posterior del robot. El robot es barreja amb l’ajuda de rodes fixades a l’eix del motor d’engranatges. El netejador es controla mitjançant smartphone mitjançant bluetooth. El futur preveu que el robot sigui totalment autònom. Vegem com funciona aquest dispositiu
Eines i materials:
-Equip de motor 100 rpm -2 unitats;
-Webes per al motor -2 peces;
-Motor-reductor amb una roda de 75 rpm - 2 peces;
-Arduino UNO;
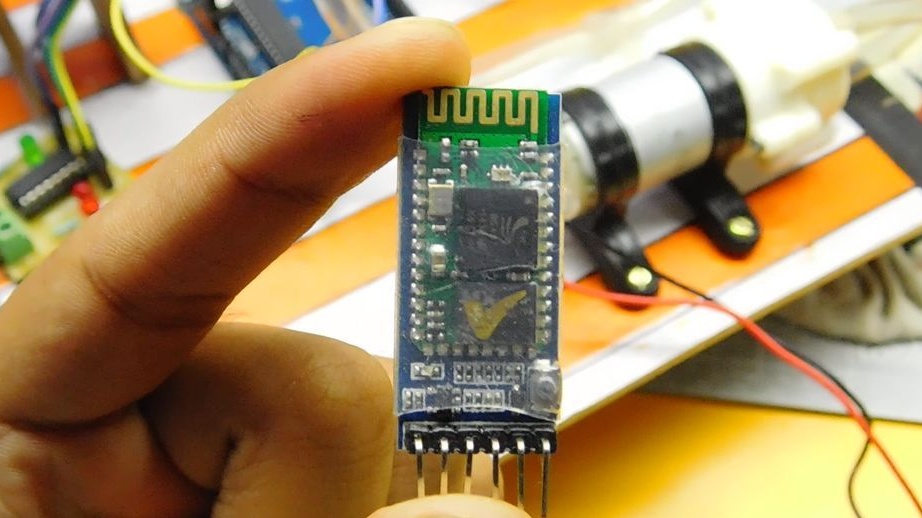
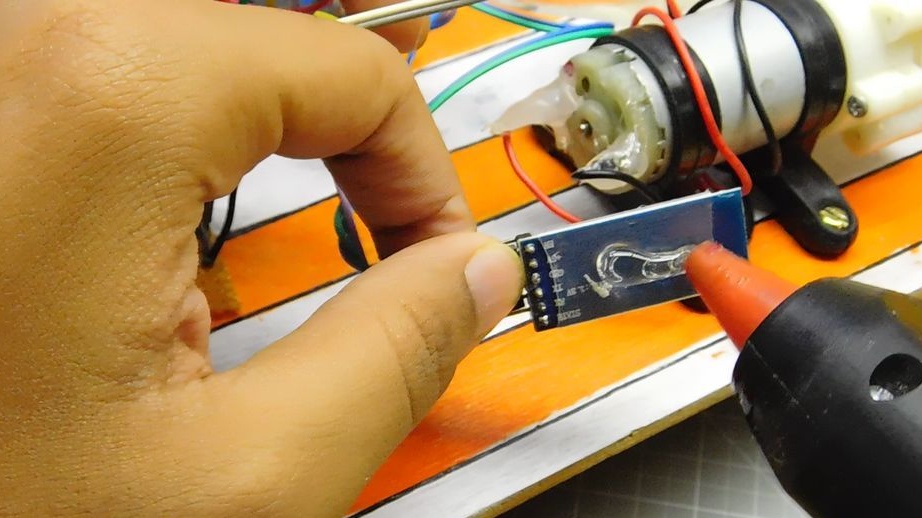
- Mòdul Bluetooth HC-05/06;
-Director L293D;
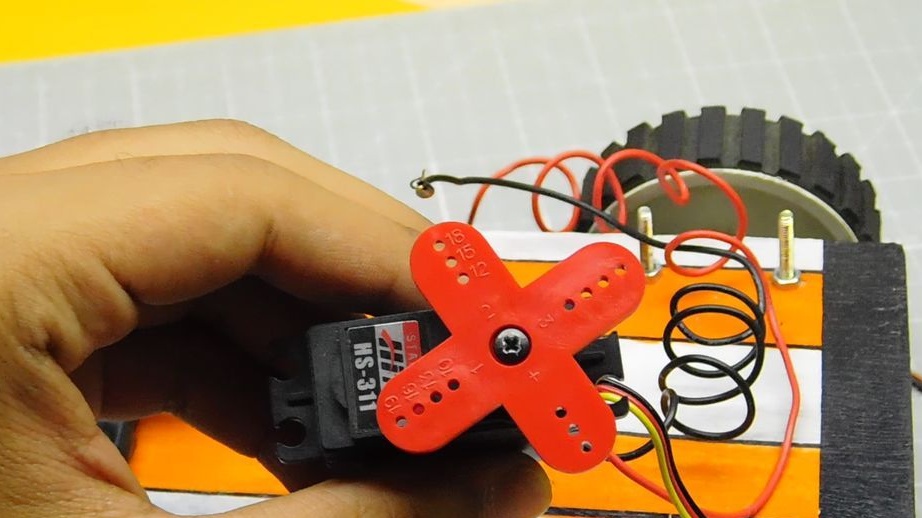
- Servomotor (rotació de 180 graus);
-12V bateria;
- Bomba de 12 V;
Transistor TIP31C;
Transistor TIP122;
- Unitat de CD - 2 peces .;
- Rodet de pintura;
- Tovallons de tela;
- Agulla amb fil;
-Tube;
-Wire;
- Saltadors;
-Junta de muntatge;
-Atxulladors;
-Placat;
-Botella de plàstic;
-Soldador de ferro;
-Pistola de vidre;
-Drill;
- Alicates;
-Dremel;
- raspall;
-Pinta;
-Marcador;
- tisores;











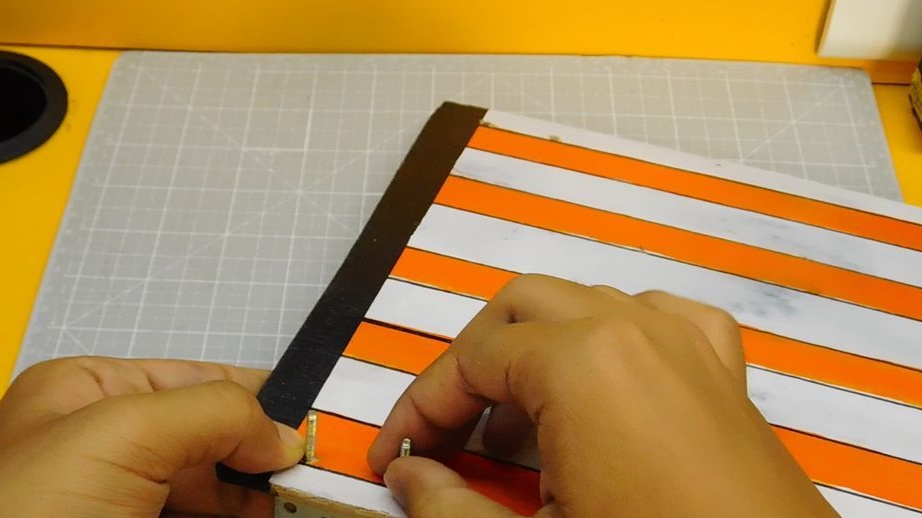
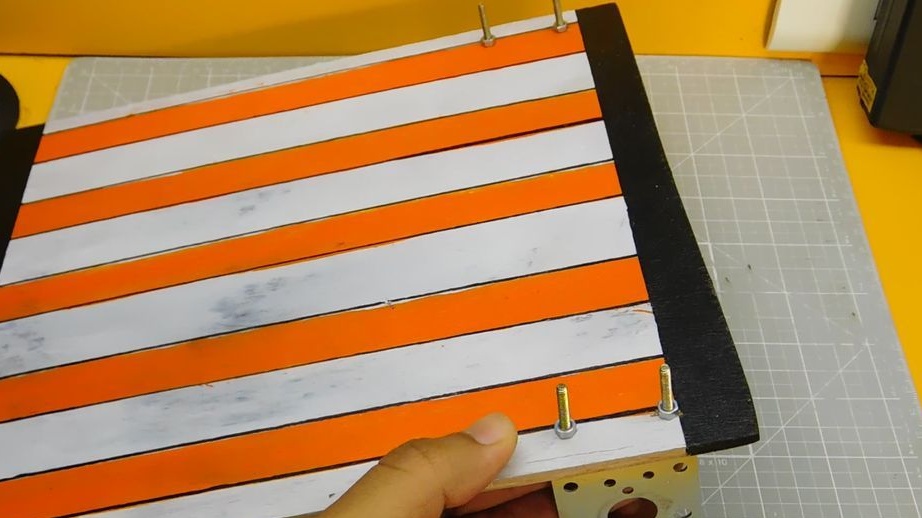
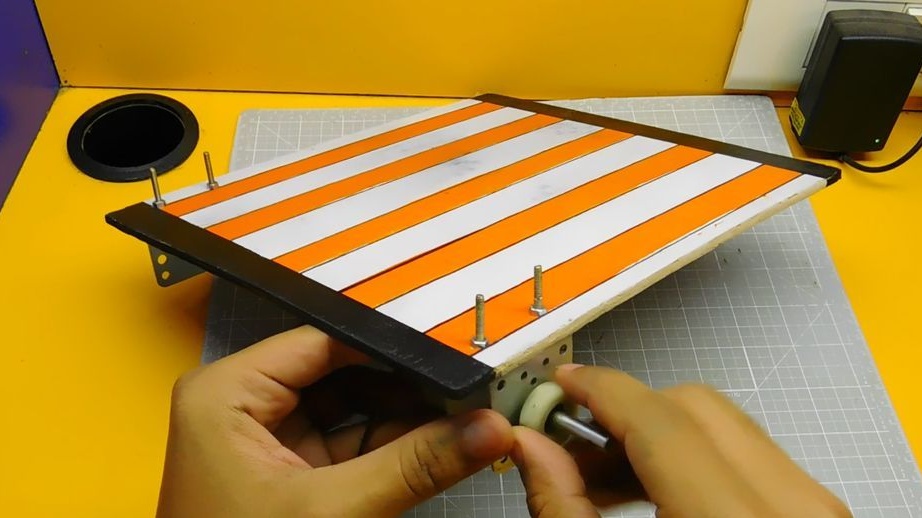
Primer pas: Fundació
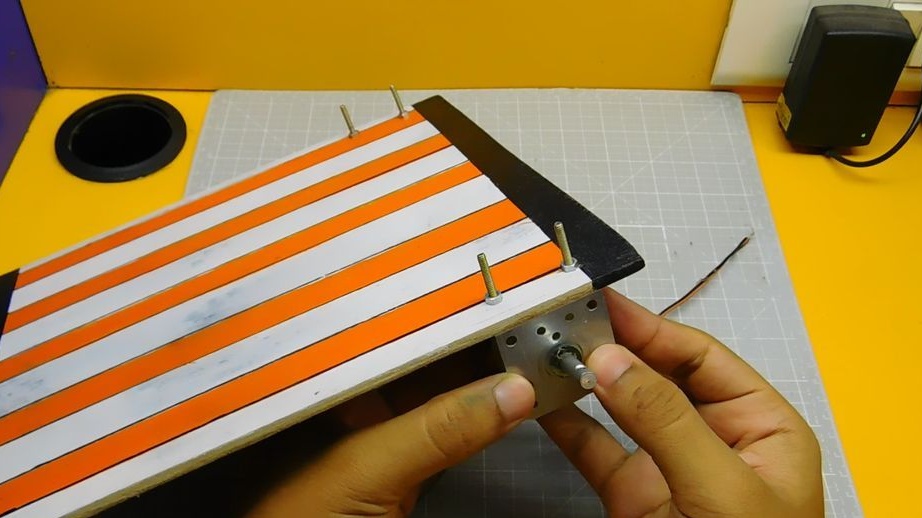
A partir de contraplacat es talla la base. Les mides de la base són 30 * 22 cm. Pinta la base. D’una banda, fixa el motor d’engranatges. Arranja de manera coaxial l’altre costat de la base.



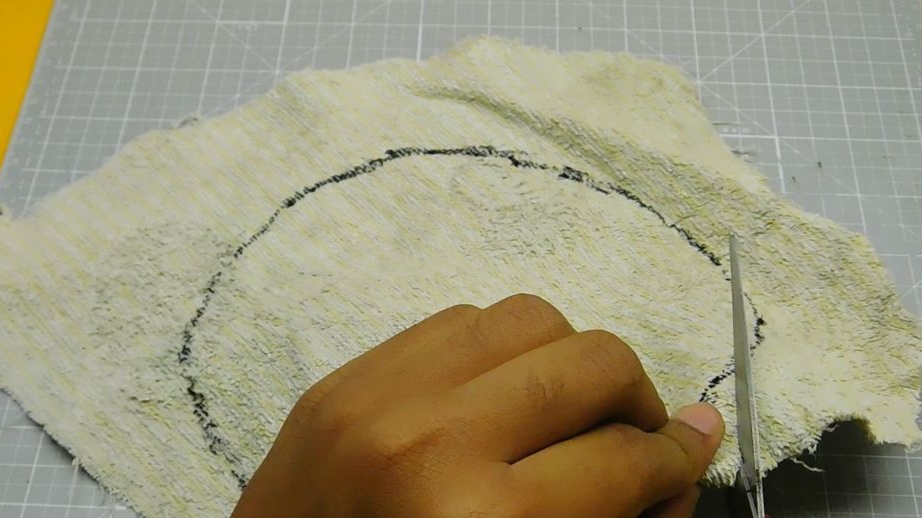
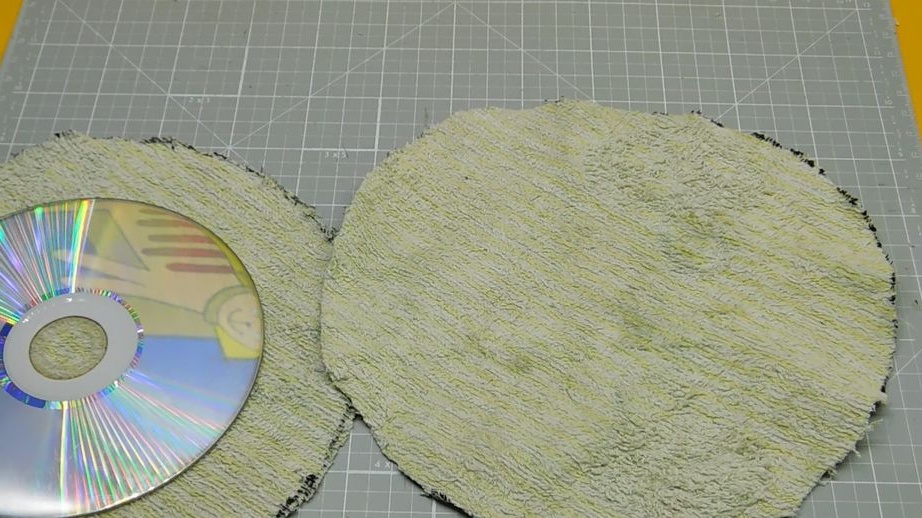
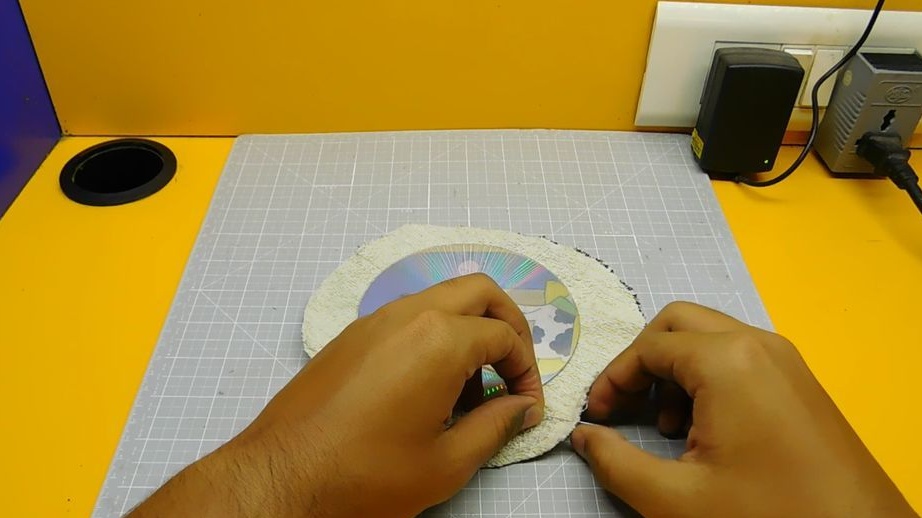
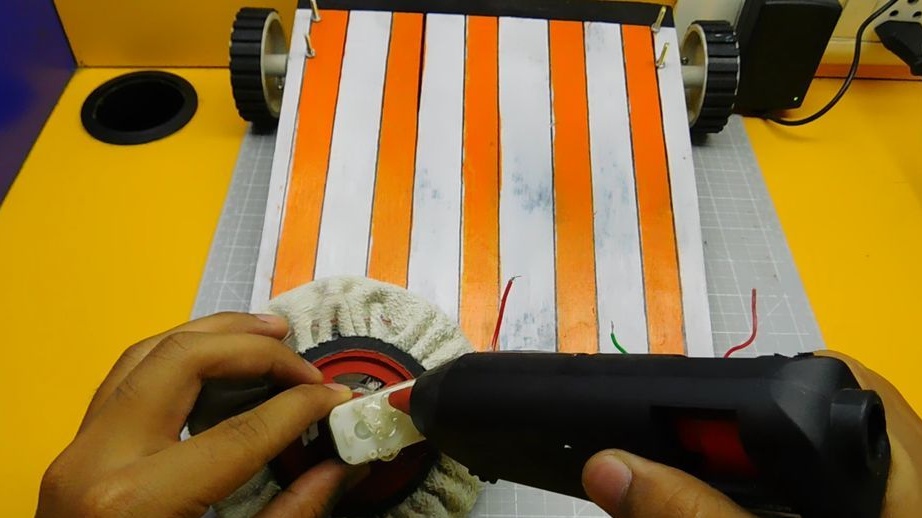
Segon segon: Raspalls
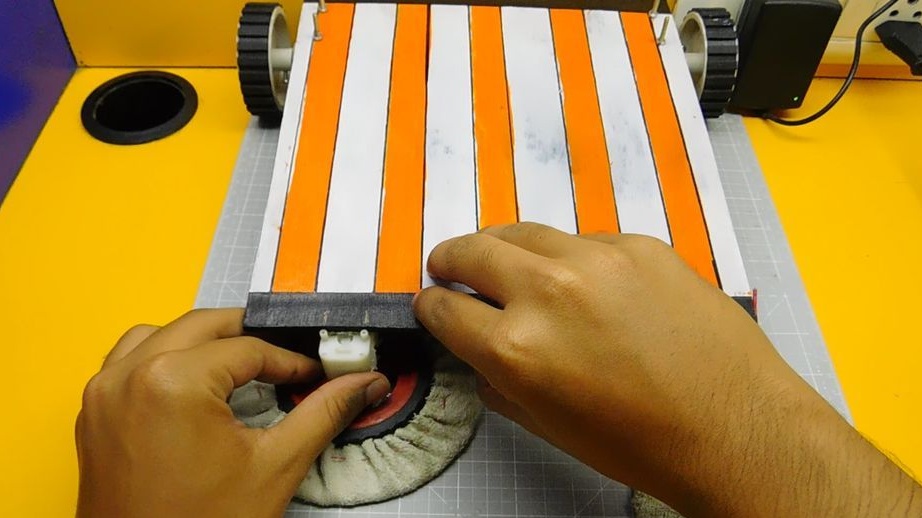
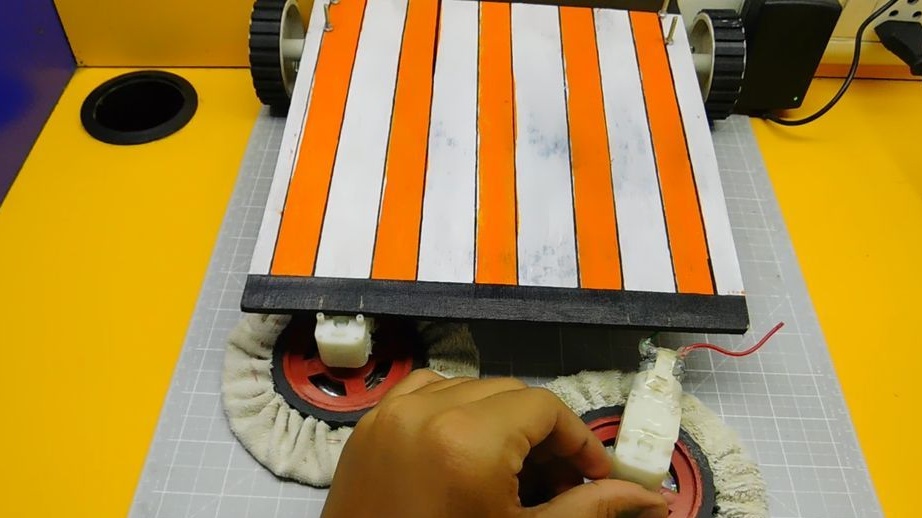
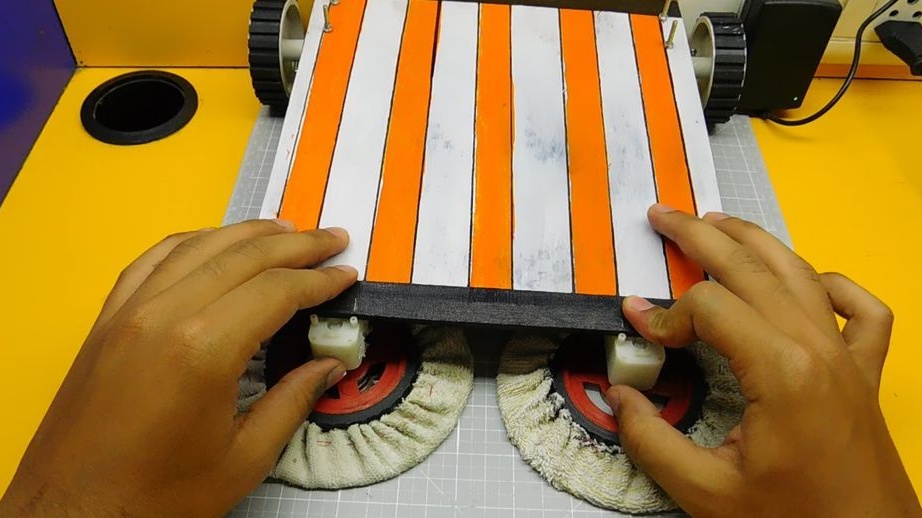
El mestre va fer pinzells a partir de CDs antics. Talla un drap. Va arruïnar la seva conducció. Operació repetida amb un altre disc. Fixeu els discos amb adhesiu de fusió calenta a la roda del motor. Fixeu els dos motors d’engranatges davant de la plataforma.








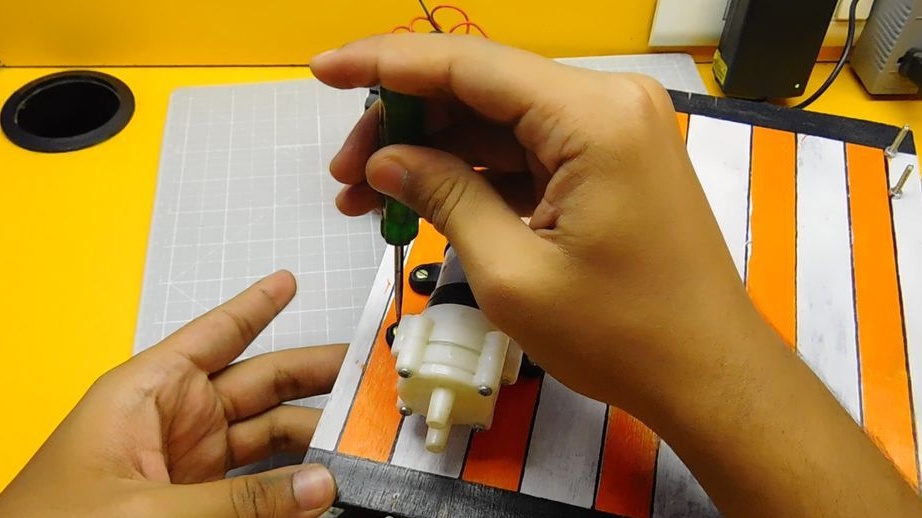
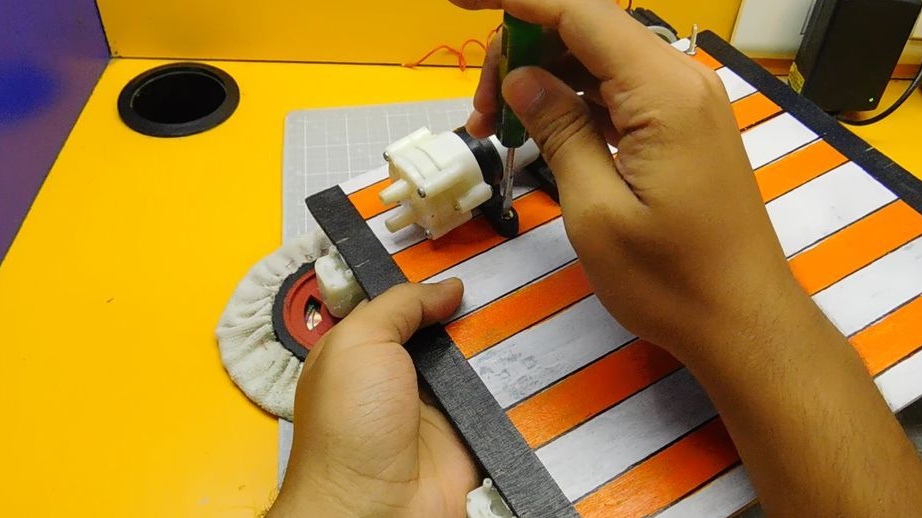
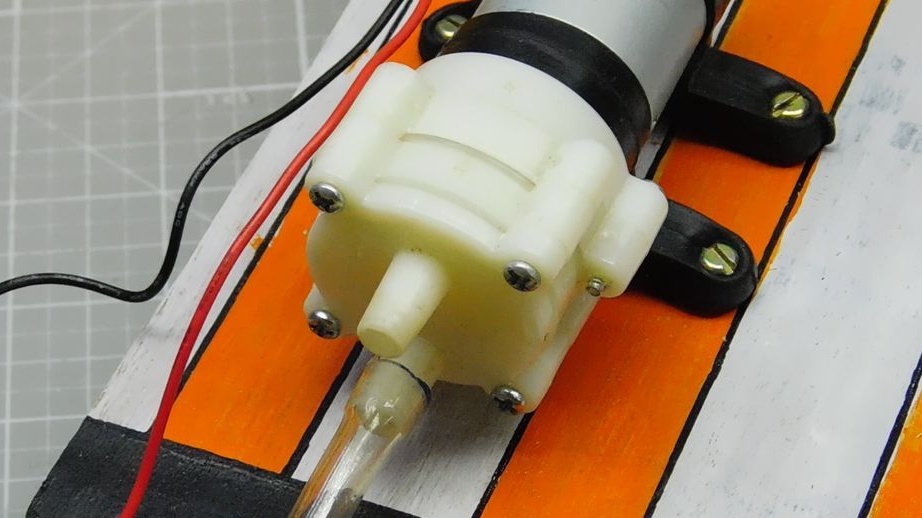
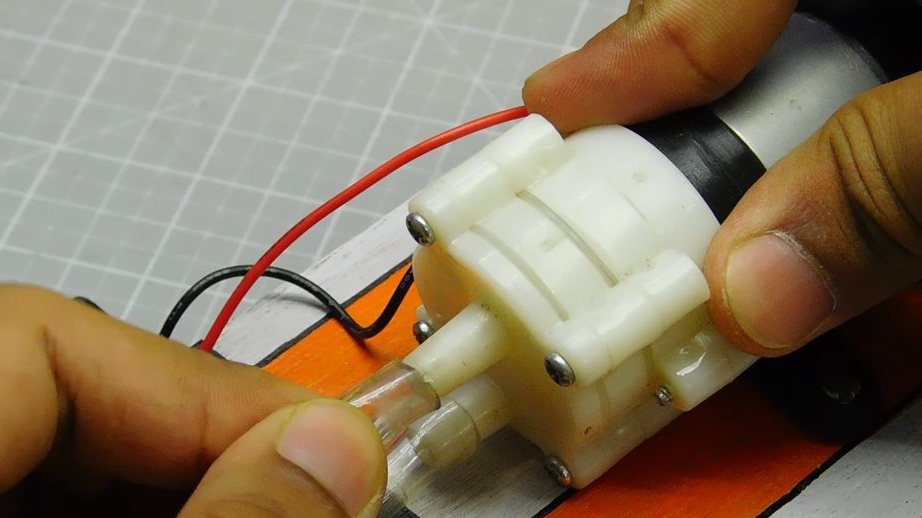
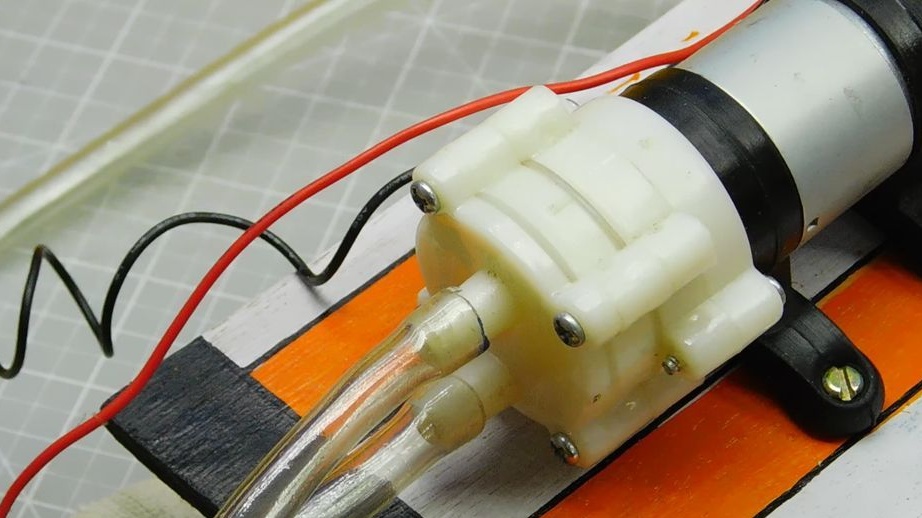
Segon segon: subministrament d’aigua
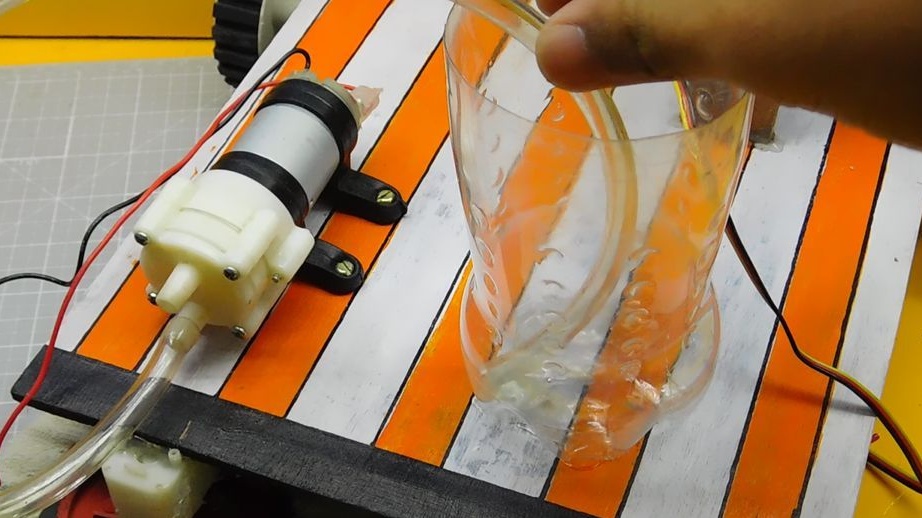
Fixa la bomba a la plataforma. Talla la part superior d’una ampolla de plàstic. Assegura l’ampolla a la plataforma. Instal·la una canonada d’entrada d’aigua. Posteriorment, es fixarà el tub de subministrament d’aigua als raspalls.




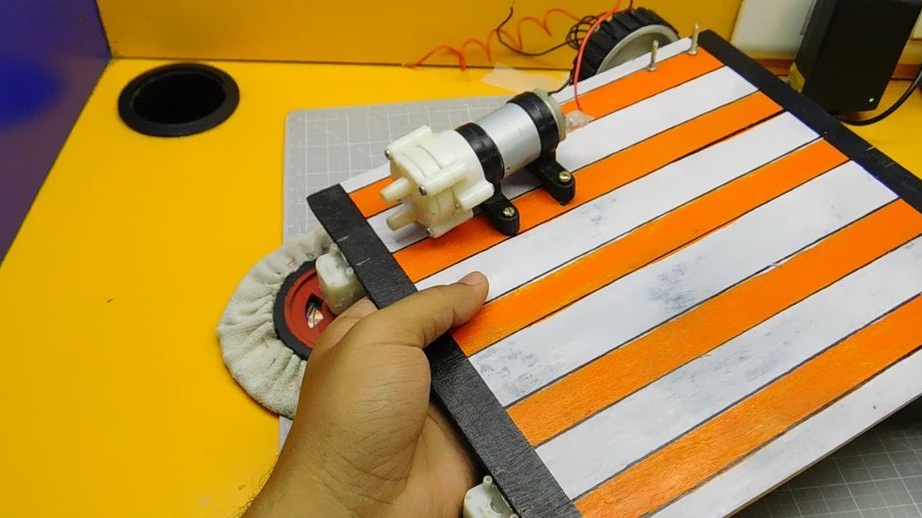




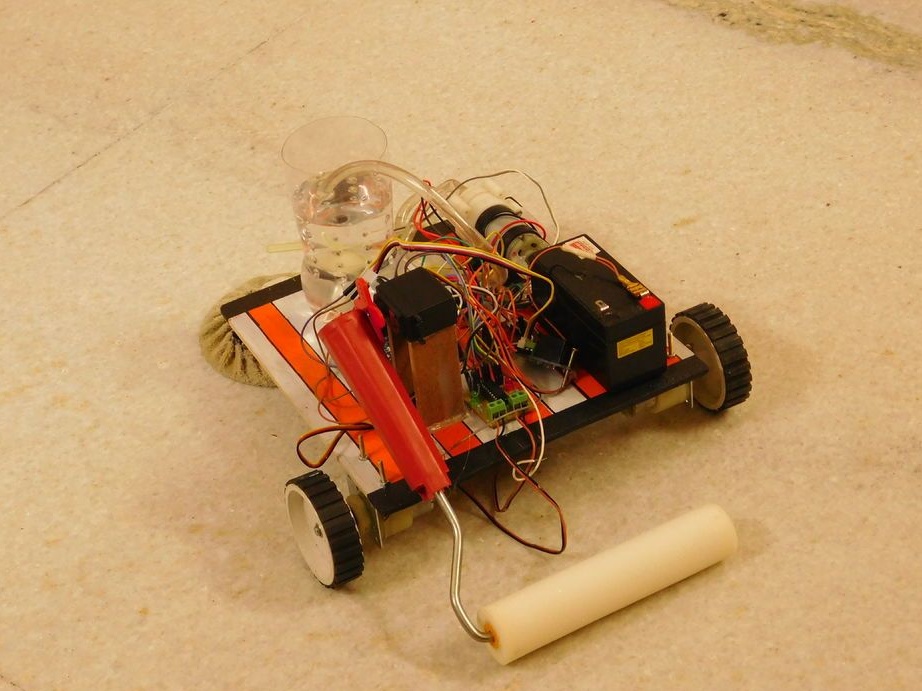
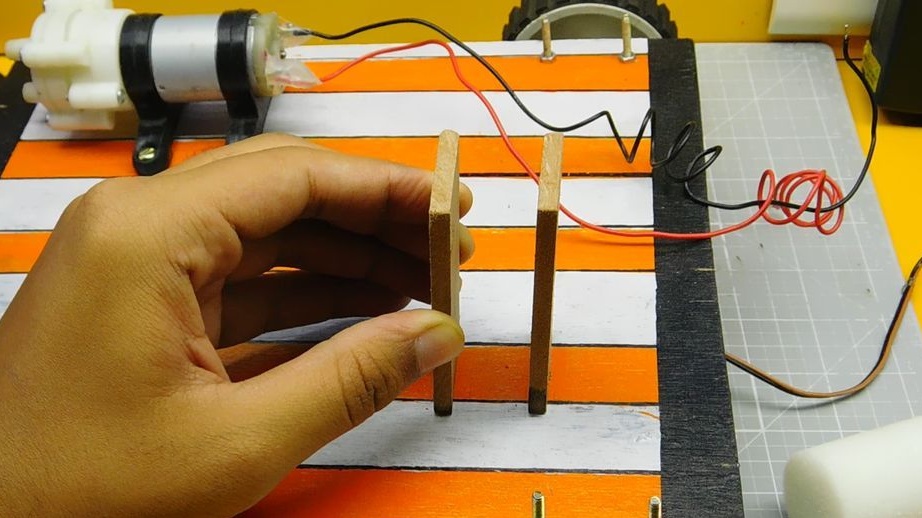
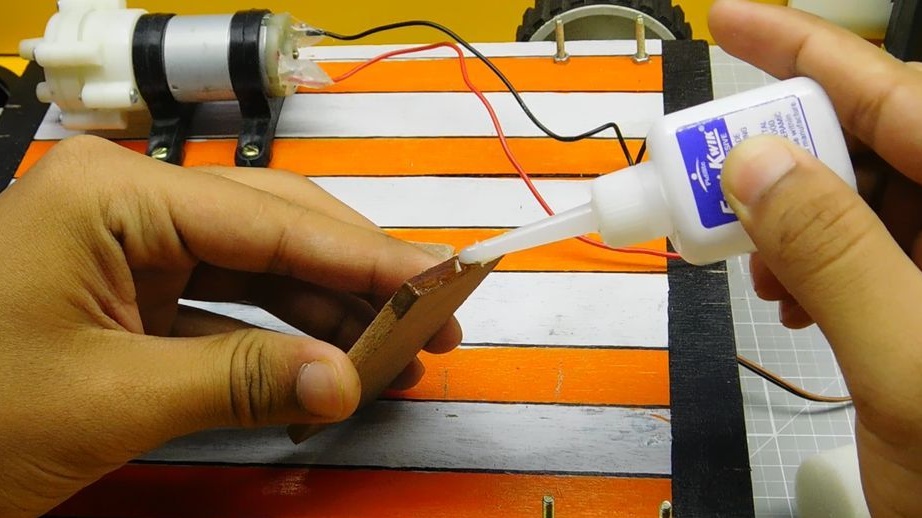
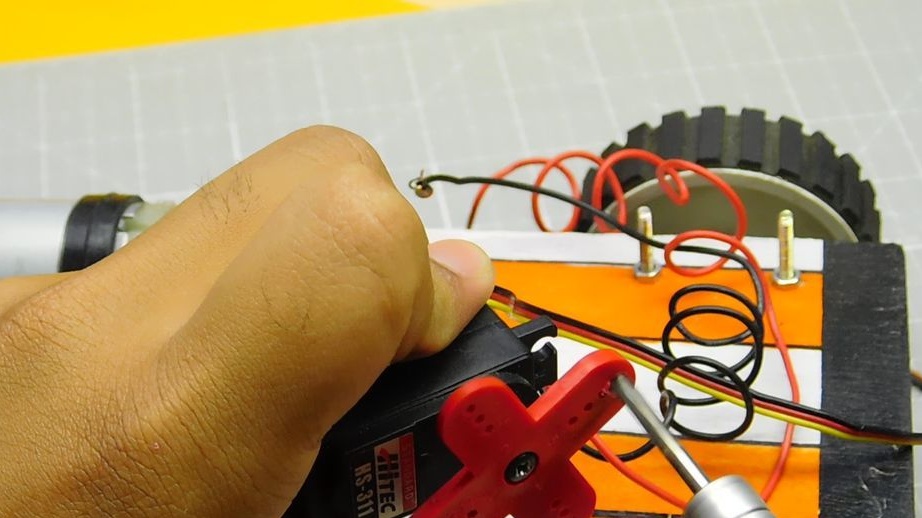
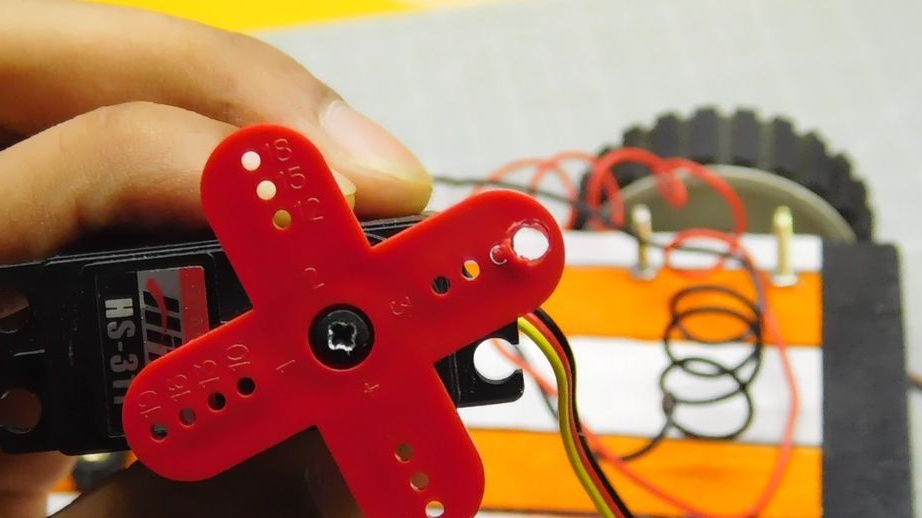
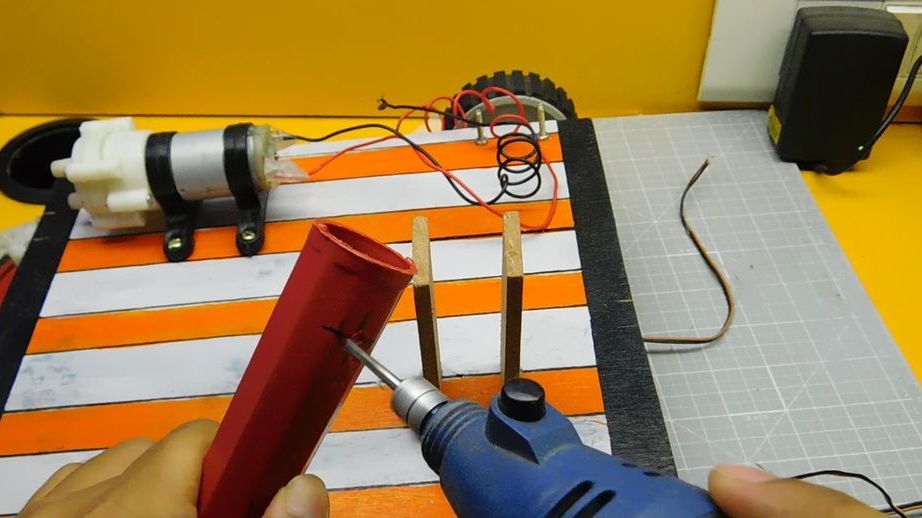
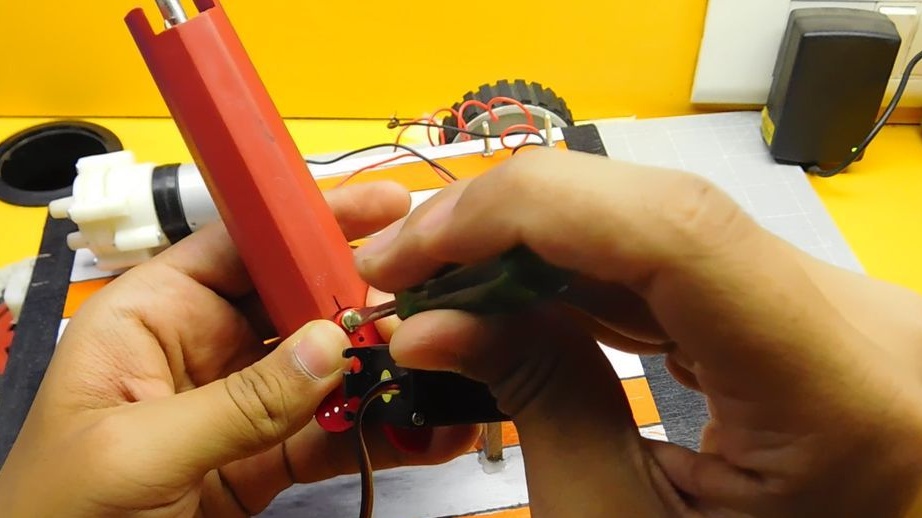
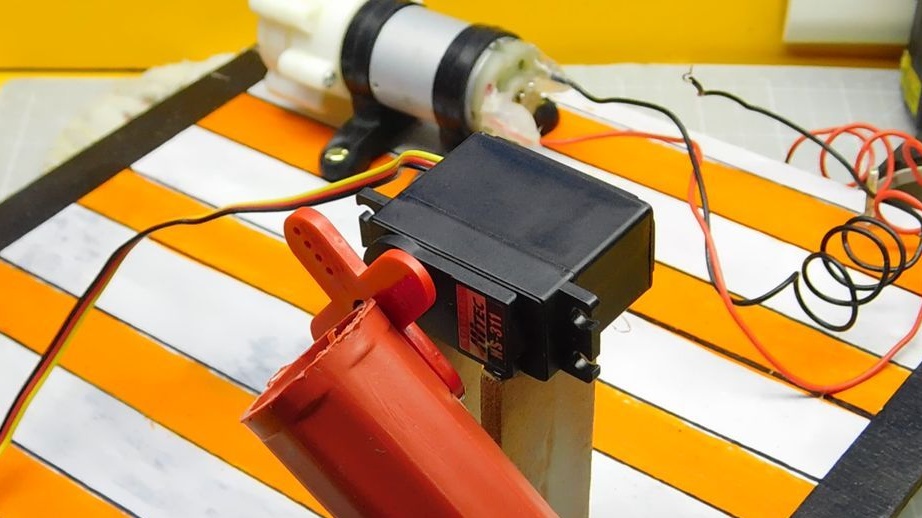
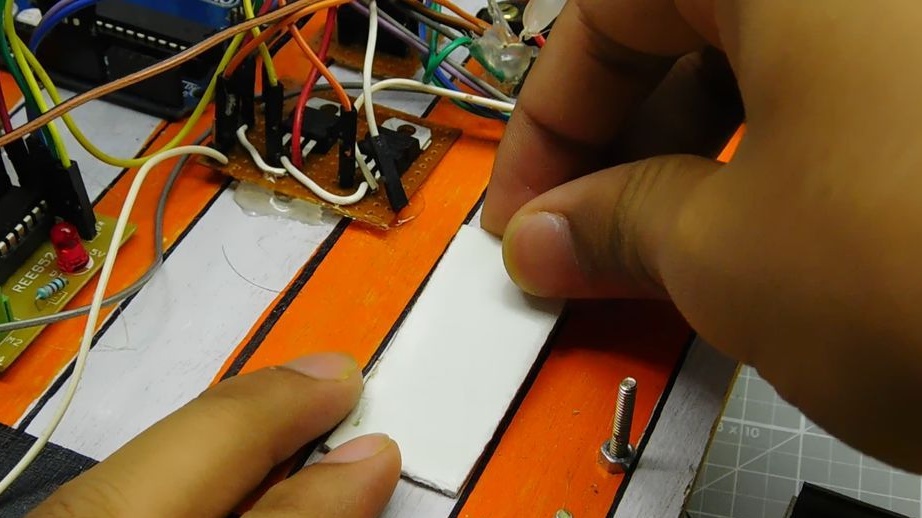
Tres Pas: Mecanisme d’elevació de corrons
La tasca del corró és recollir la pols fina. Com que de vegades es necessita el corró, el mestre va decidir fer un mecanisme per pujar i baixar el corró. Arranja dos llistons de la plataforma paral·lels els uns als altres. Fa dos forats, un a la palanca servo, el segon al mànec del corró. Cargolem la nansa del corró a la palanca. Assegura el servo als llistons.


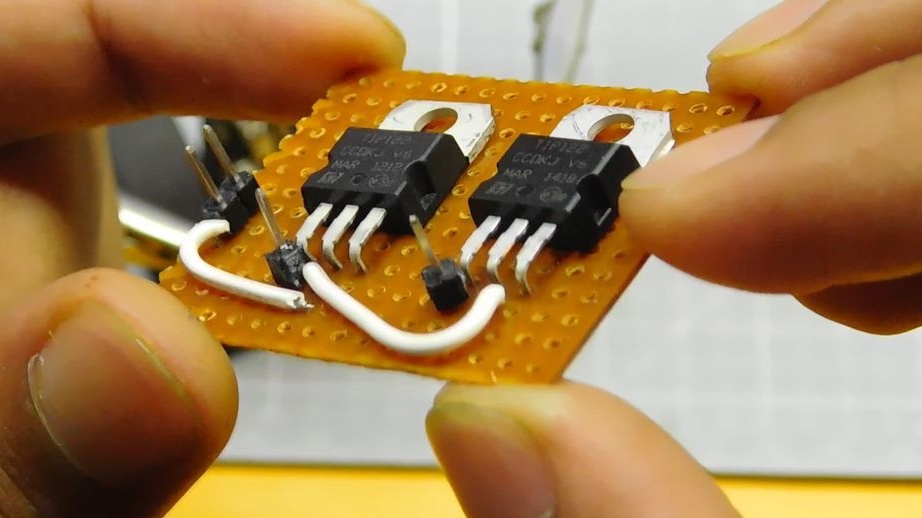
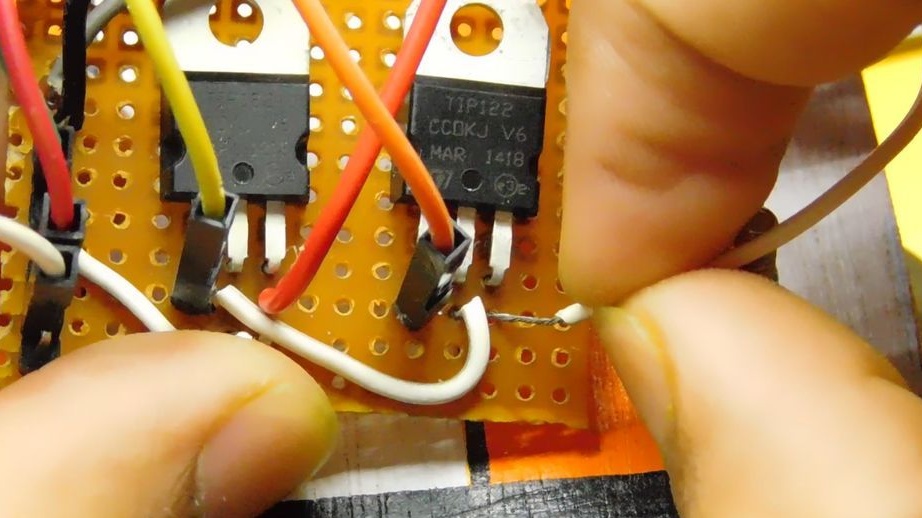
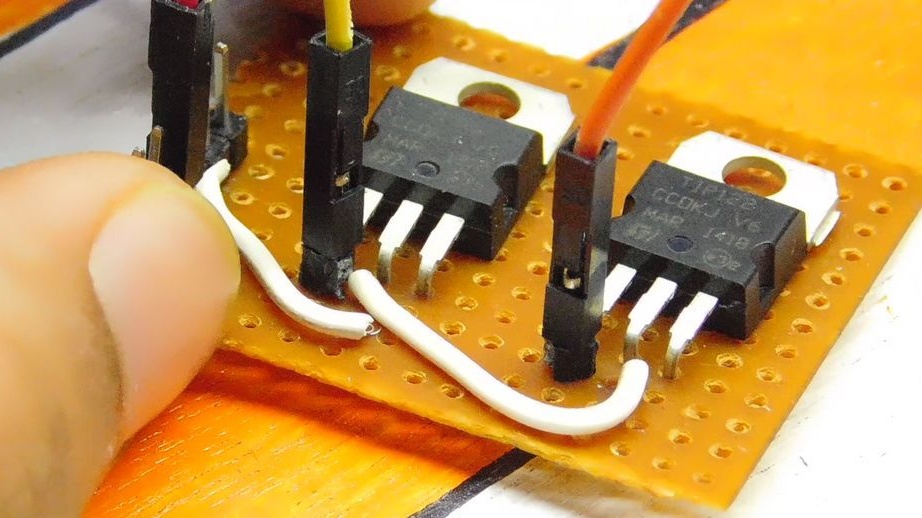
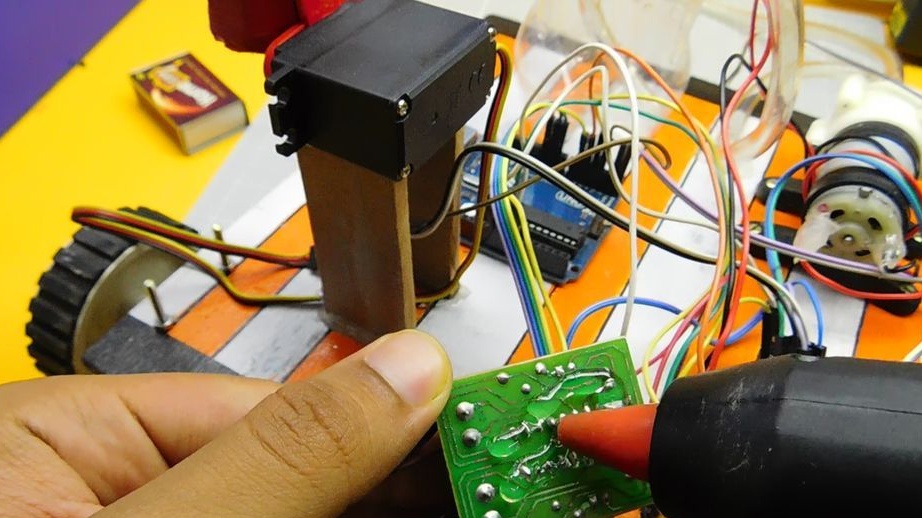
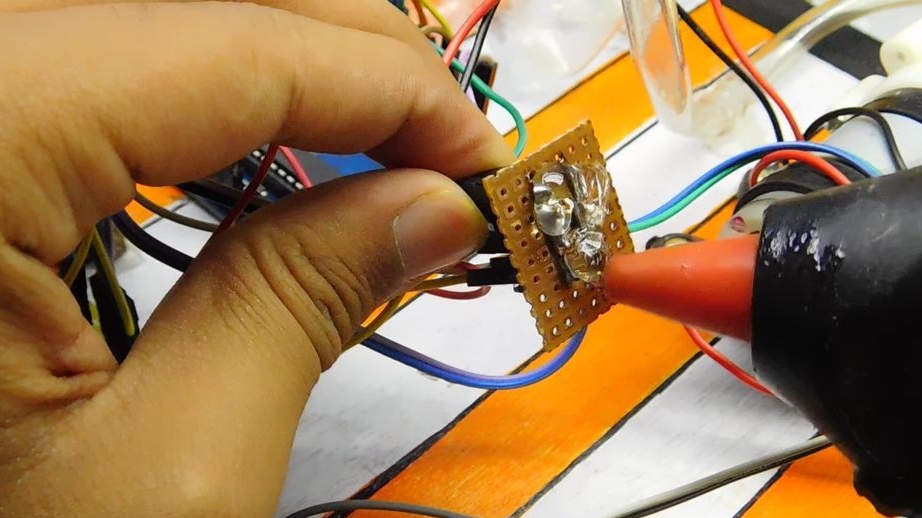
Quatre pas: Transistor
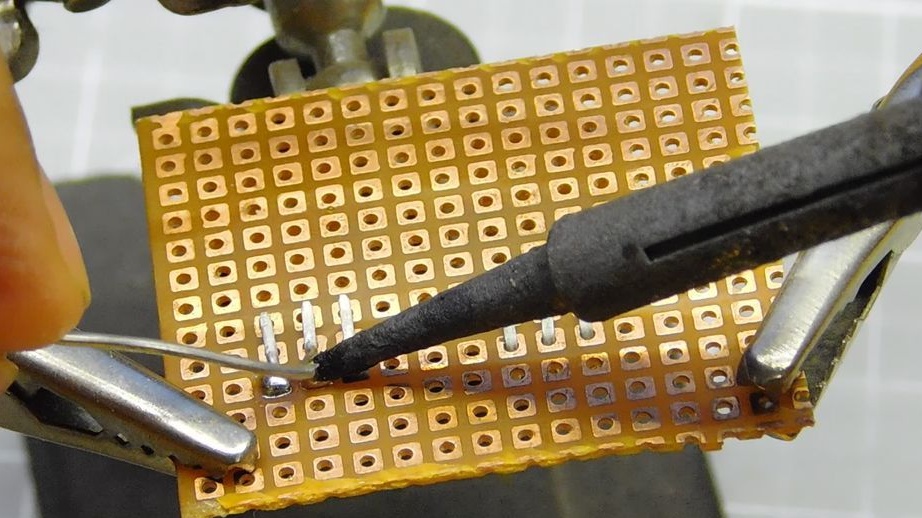
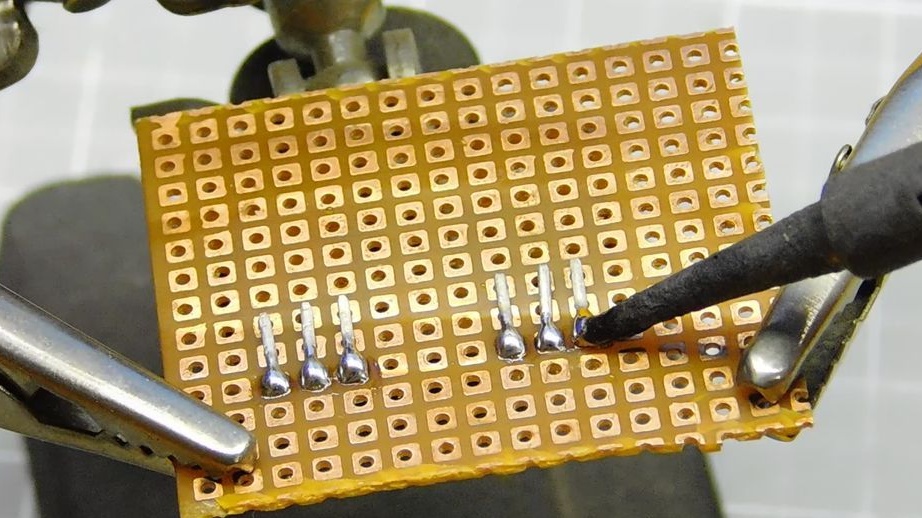
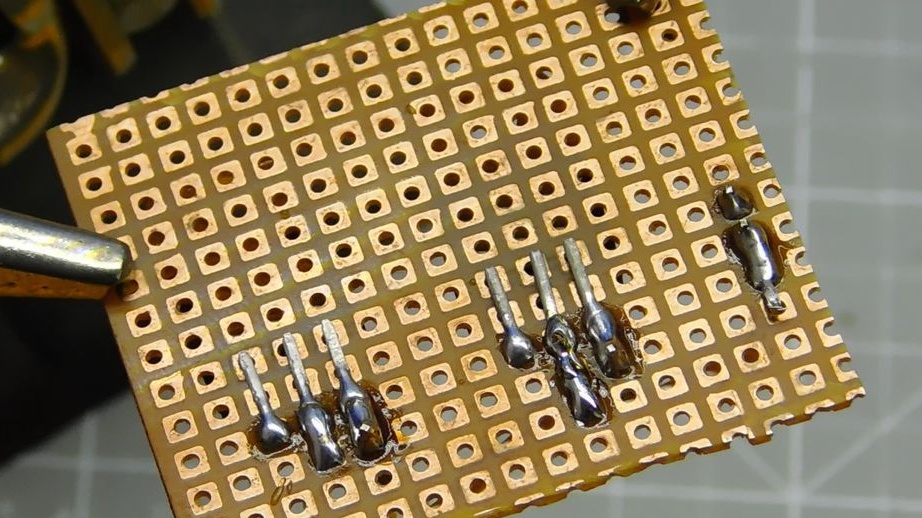
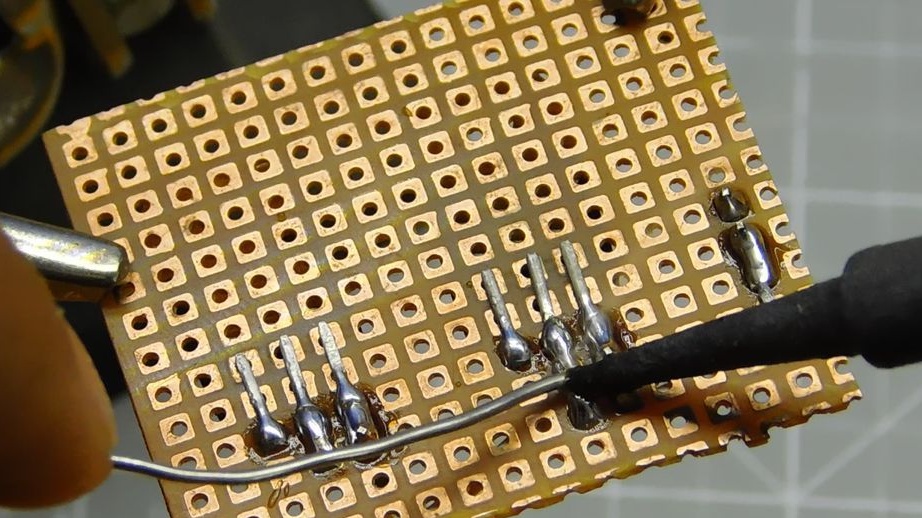
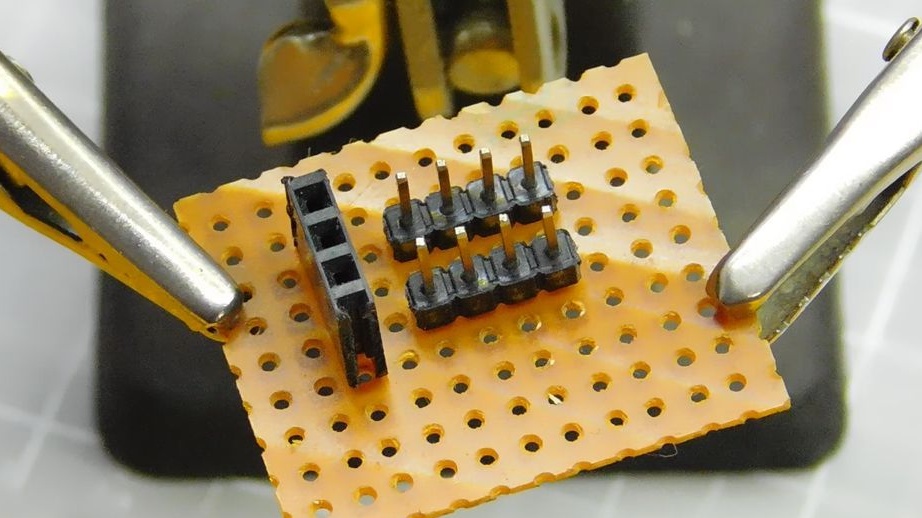
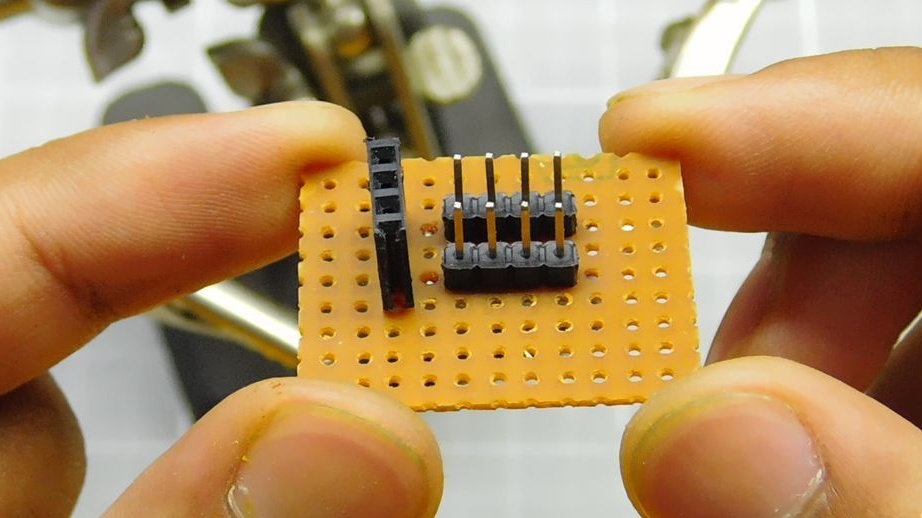
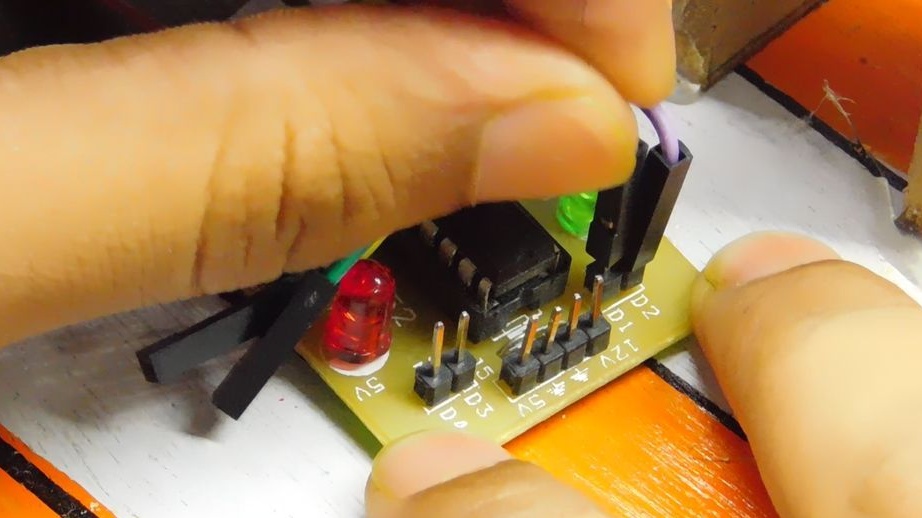
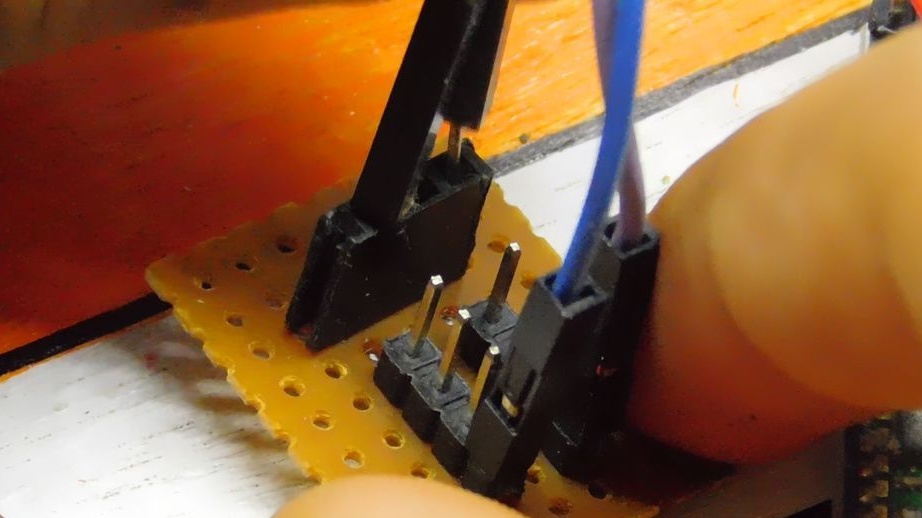
Per a una bomba d’aigua i motors, es necessita una potència de 12 V. Però, com que Arduino dóna només 5 V, el mestre recull el circuit al transistor TIP122.A més, l’assistent afegeix diversos pins + 5V i Gnd a la placa de circuit.
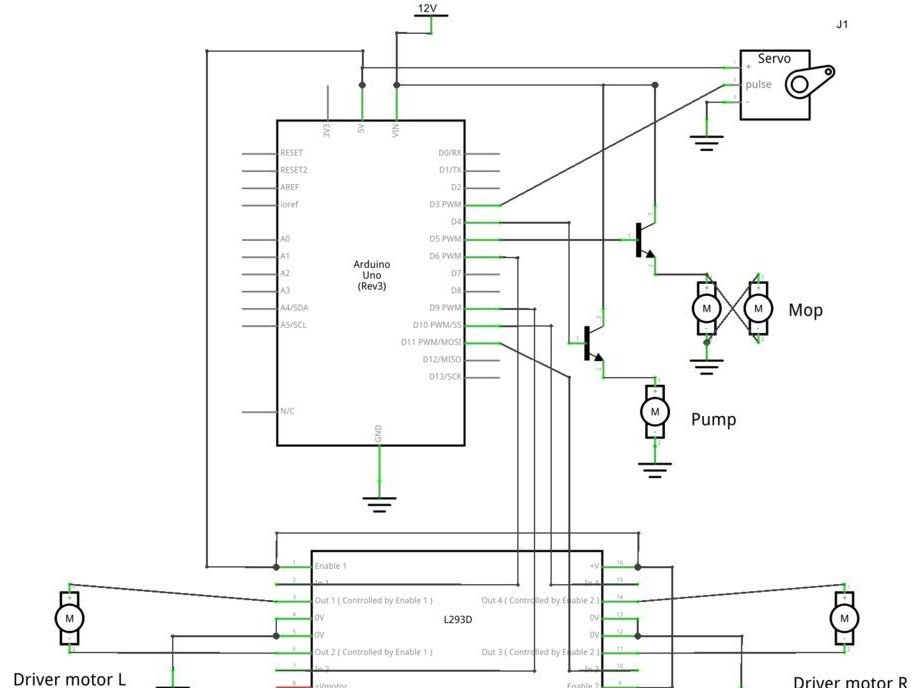
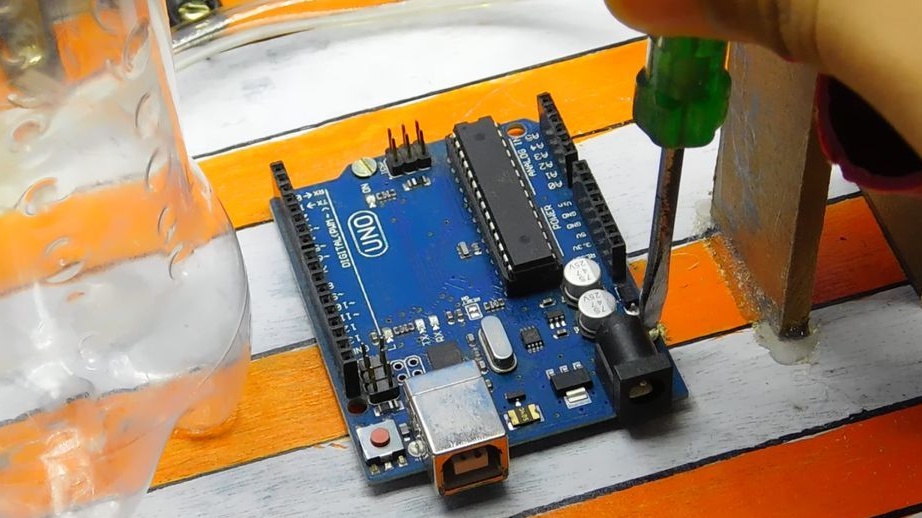
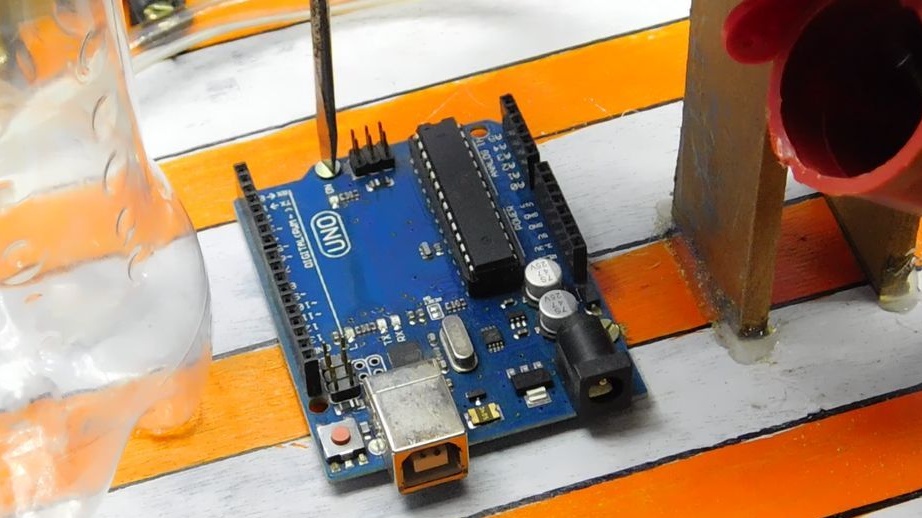
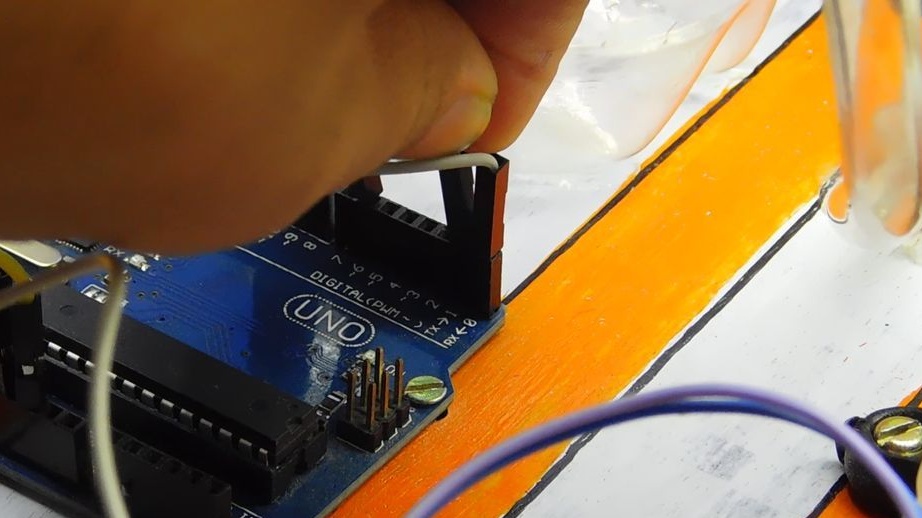
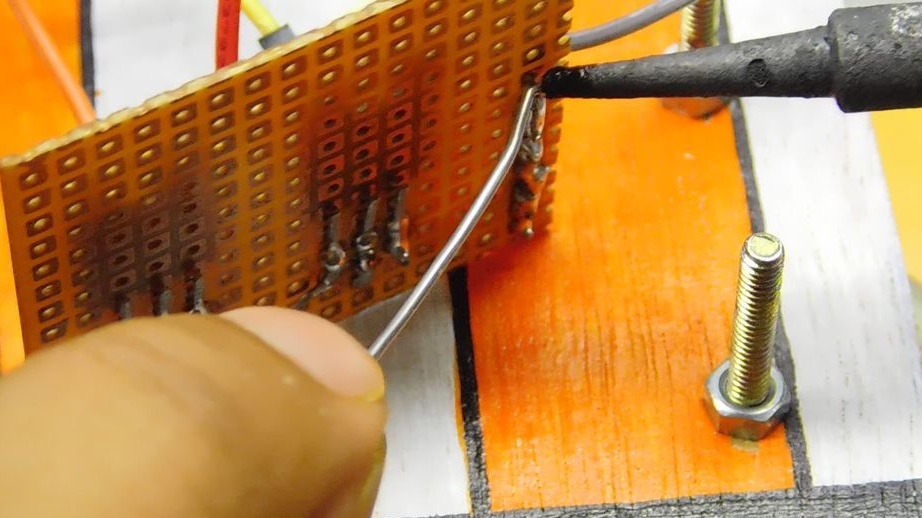
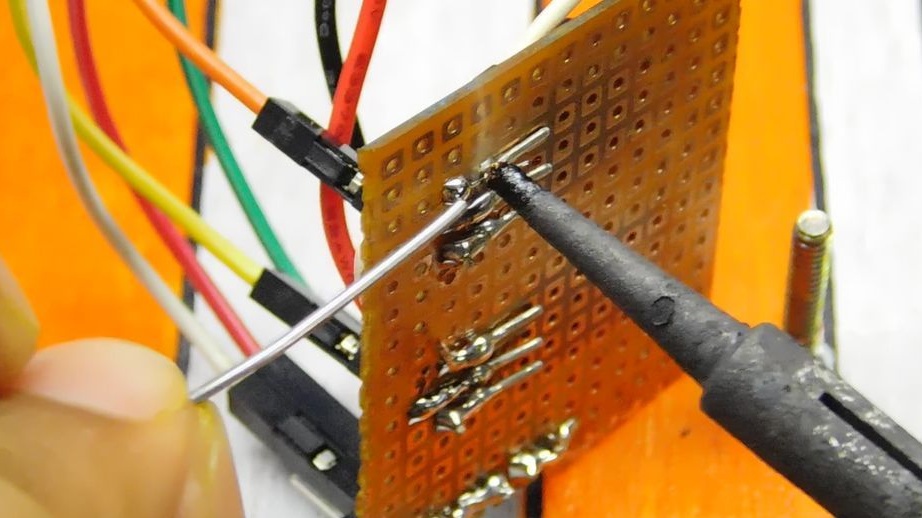
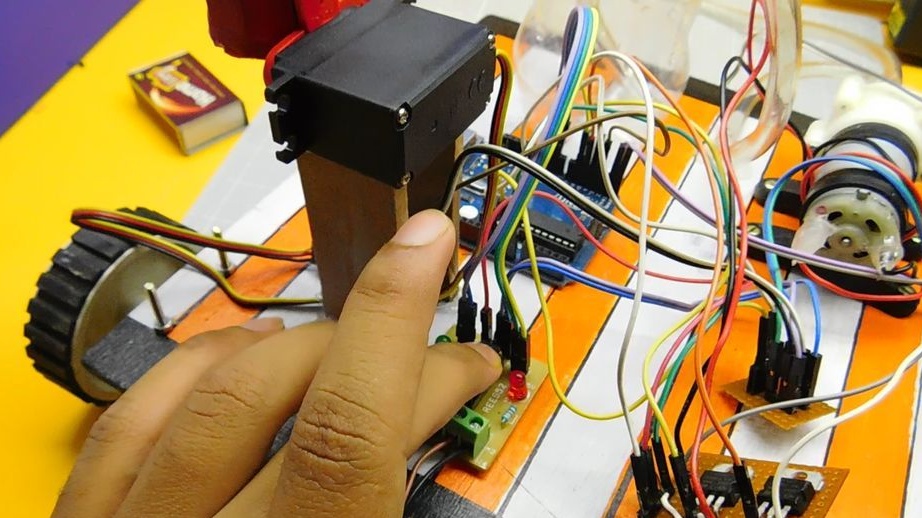
Cinquè pas: Instal·lació del circuit d’Arduino
Assegura Arduino a la plataforma i connecta dispositius elèctrics a la placa.
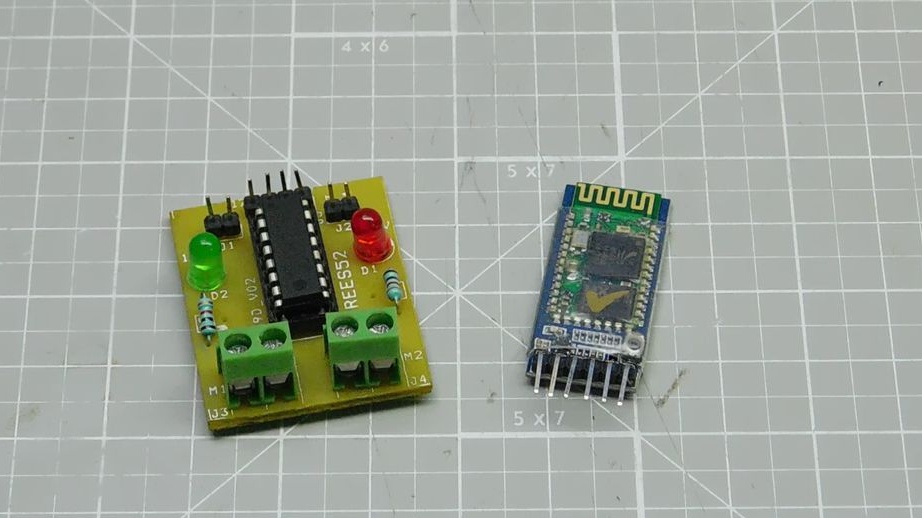
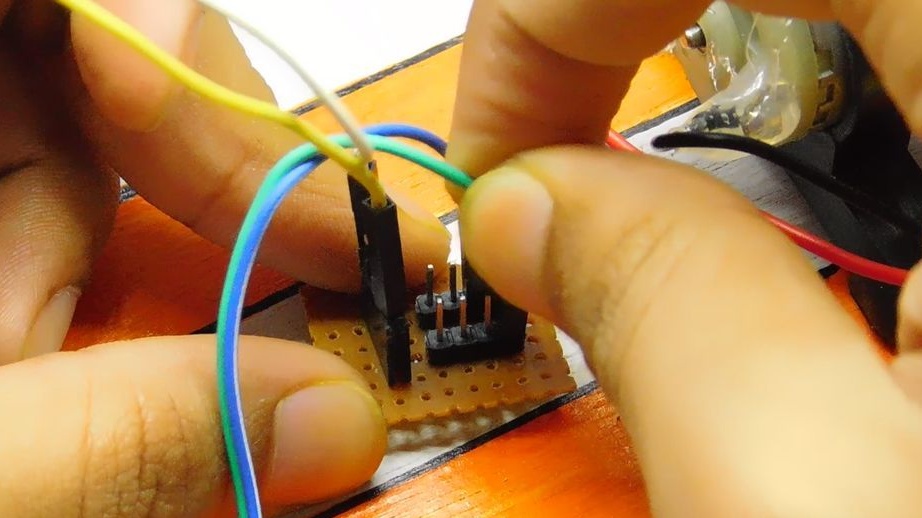
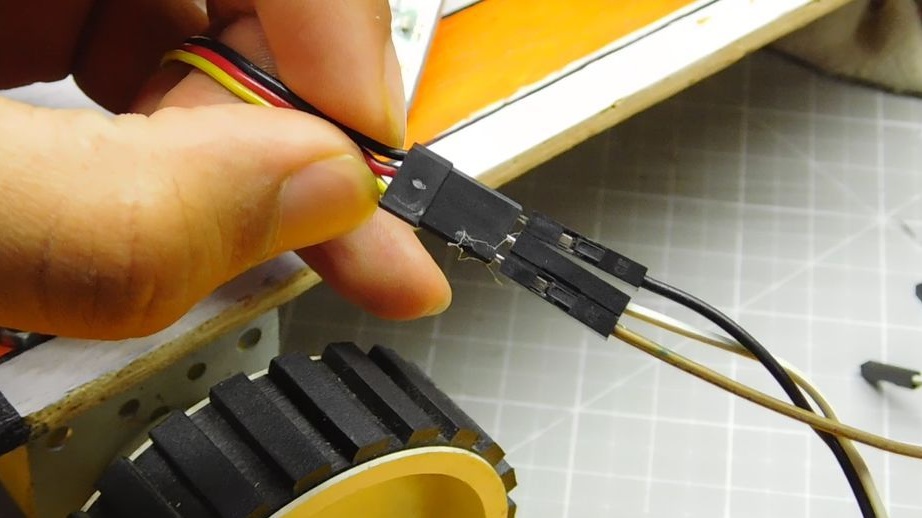
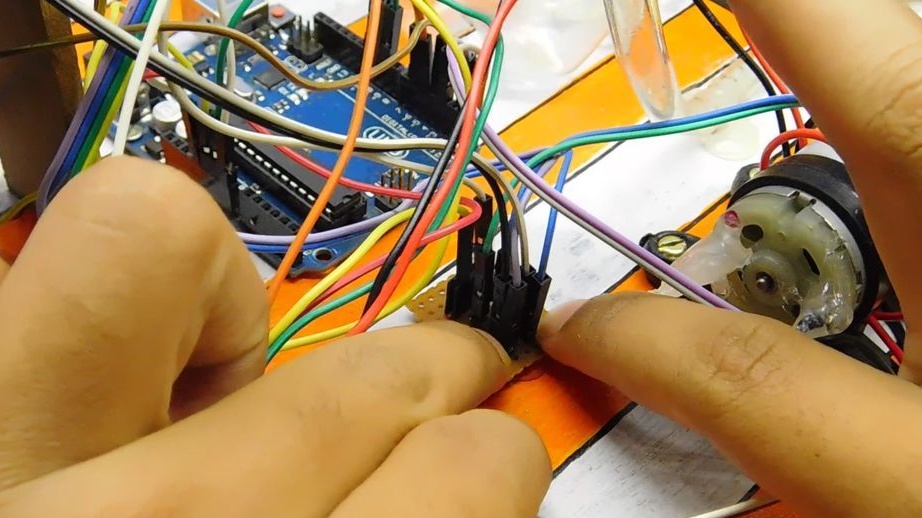
Mòdul de control del motor.
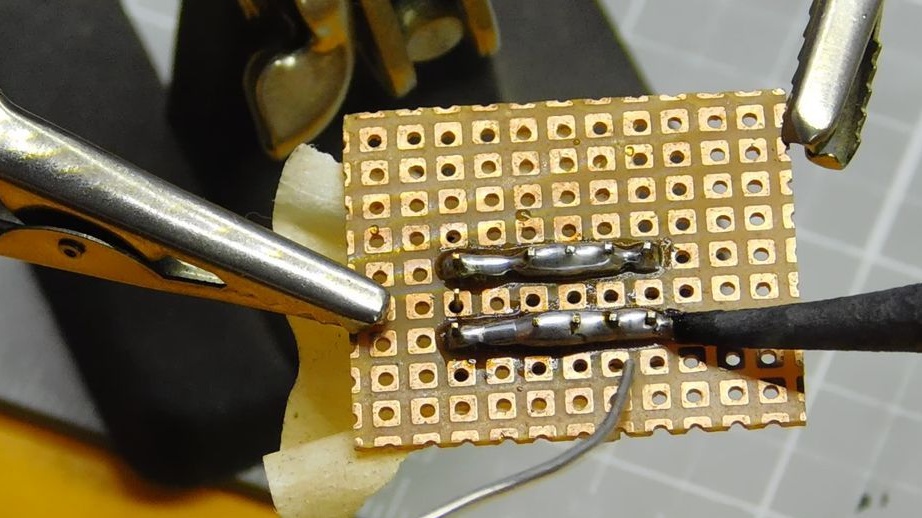
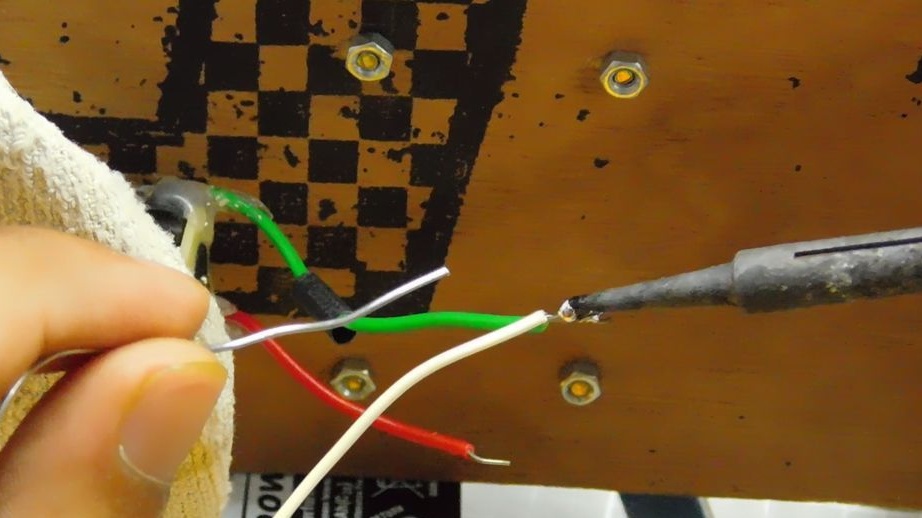
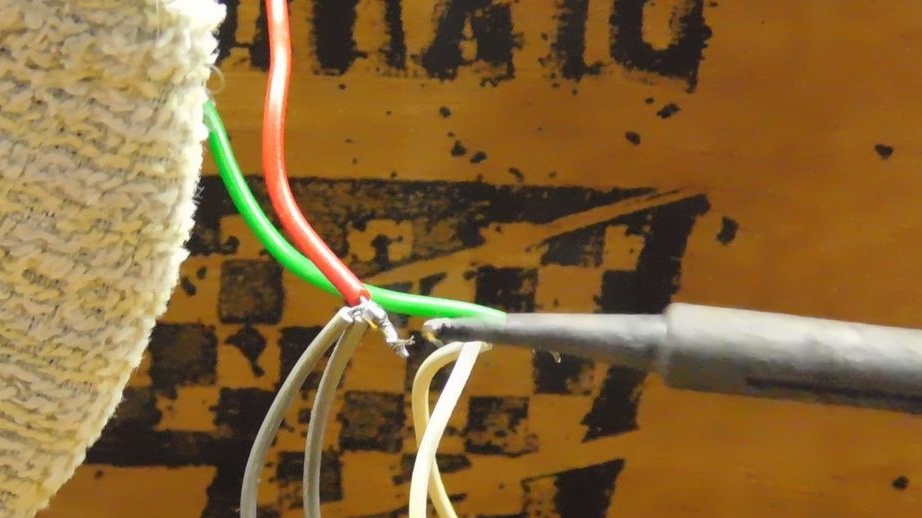
Es solda als motors (sobre els quals es fixen les rodes per al moviment, no els raspalls) dels cables. Fixa els cables de les preses de muntatge del mòdul. A continuació, connecteu el mòdul a Arduino de la manera següent.
Mòdul ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
El mòdul + 12V es connectarà a la bateria.
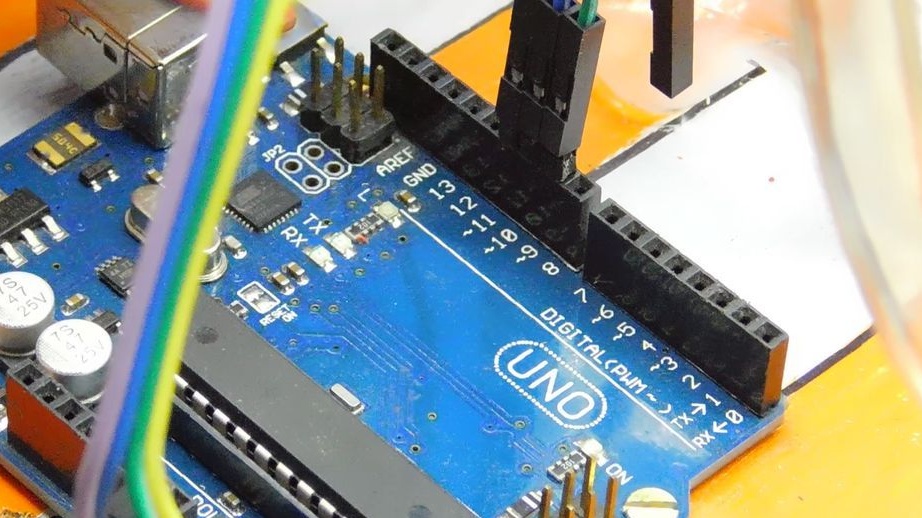
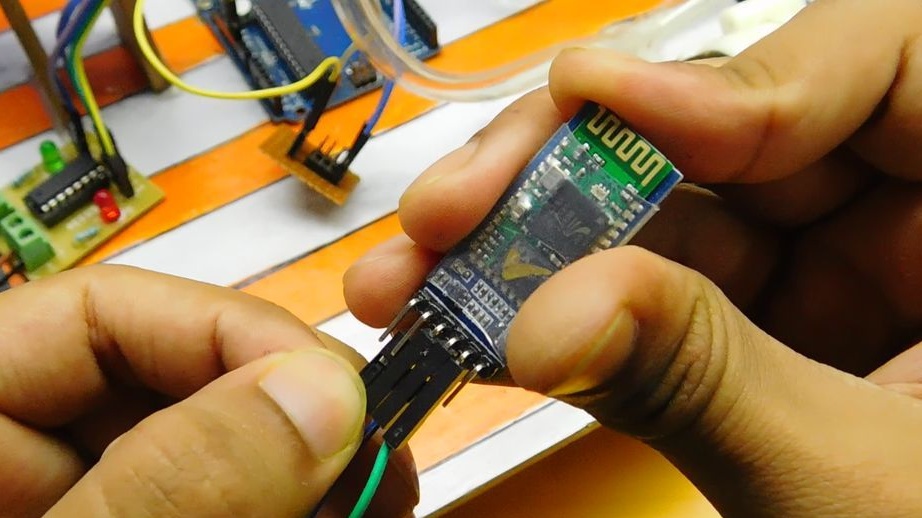
Connexió Bluetooth.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servo motor ::: Arduino
Vcc - + 5V
Gnd - gnd
Senyal - D3
Després connecta els motors de la bomba i del raspall segons l’esquema. Els motors de raspall estan connectats en paral·lel i girant en diferents direccions, cap a la dreta en el sentit de les agulles del rellotge i a l’esquerra.

Sisè pas: Fixacions de peces de robot
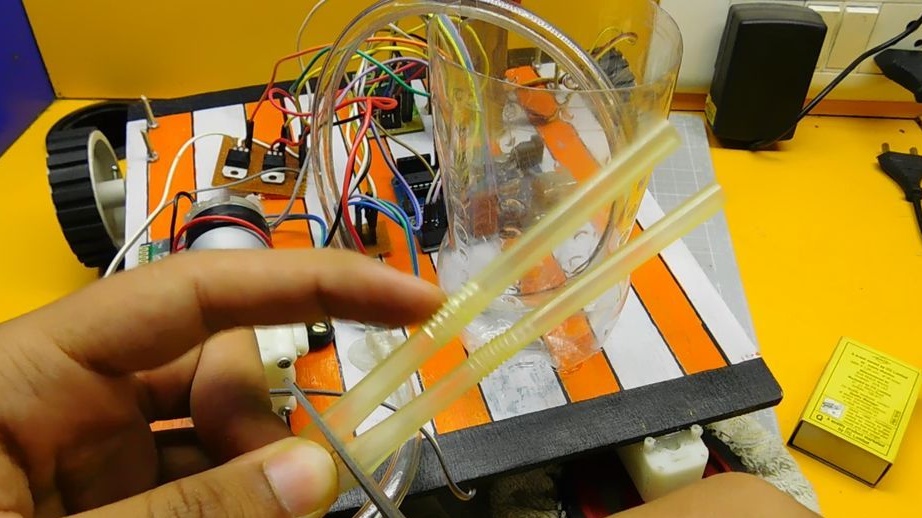
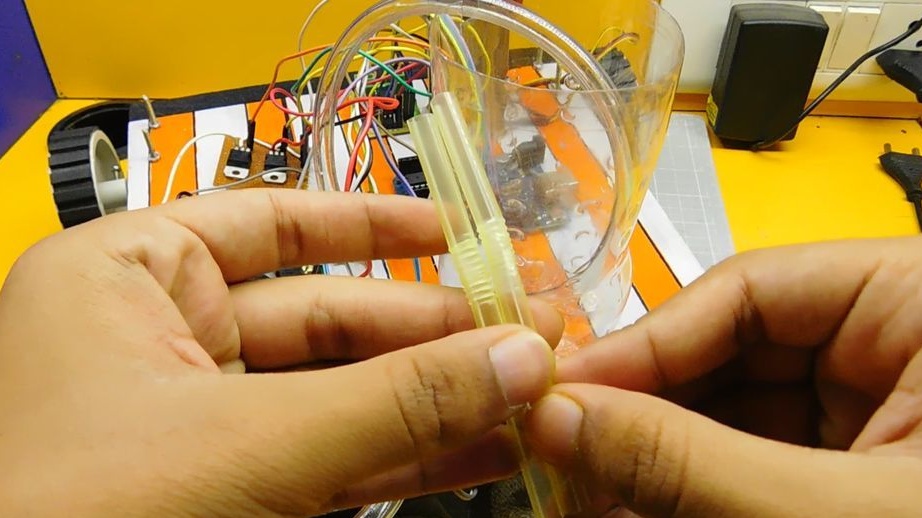
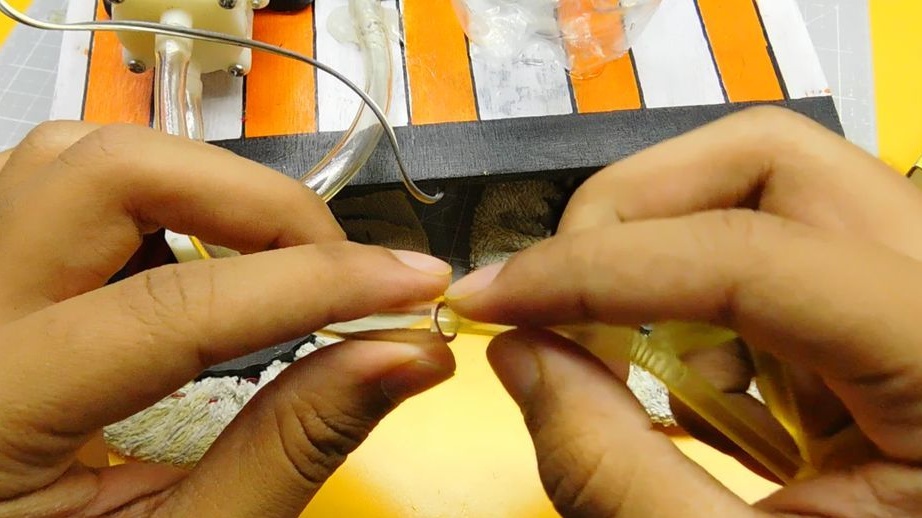
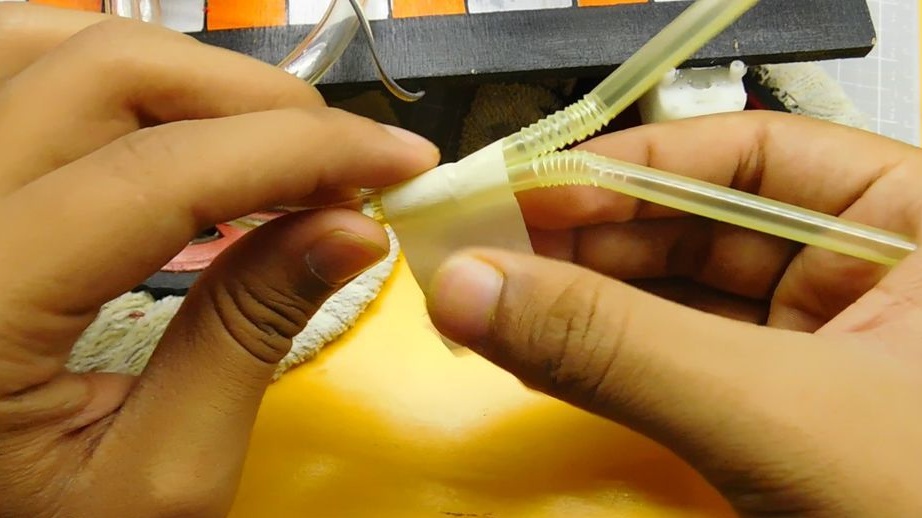
Talla dues palletes de còctels d'aproximadament 7 cm cadascuna. Insereix les palletes al tub de subministrament d'aigua. Fixa les palles davant dels raspalls.




Panys a la plataforma electrònica components

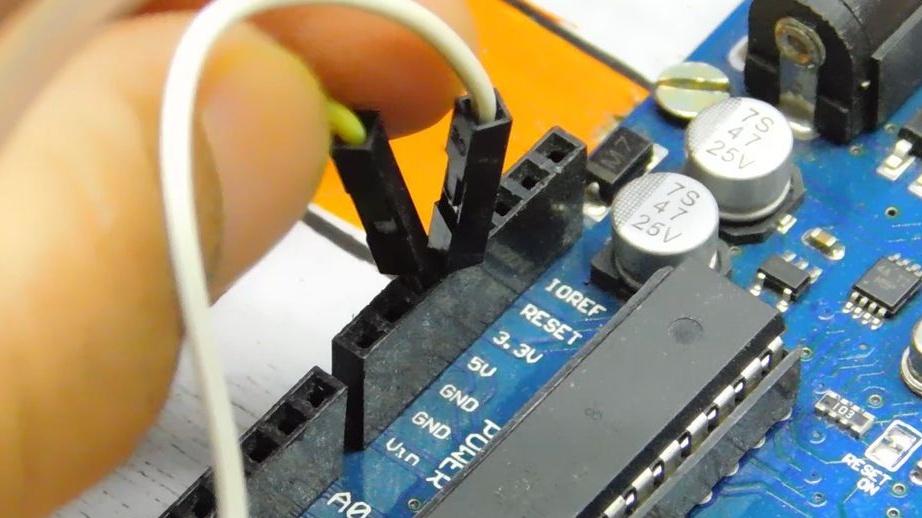
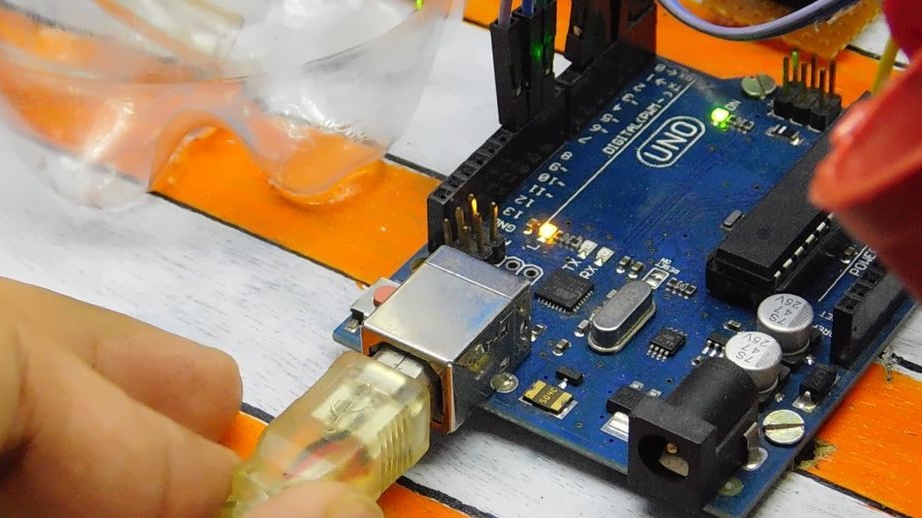
Setè pas: descarregueu el codi
Elimina els saltadors Rx i Tx del tauler d’Arduino. Connecta la placa a un ordinador. Carrega el codi. Estableix saltadors al seu lloc. .
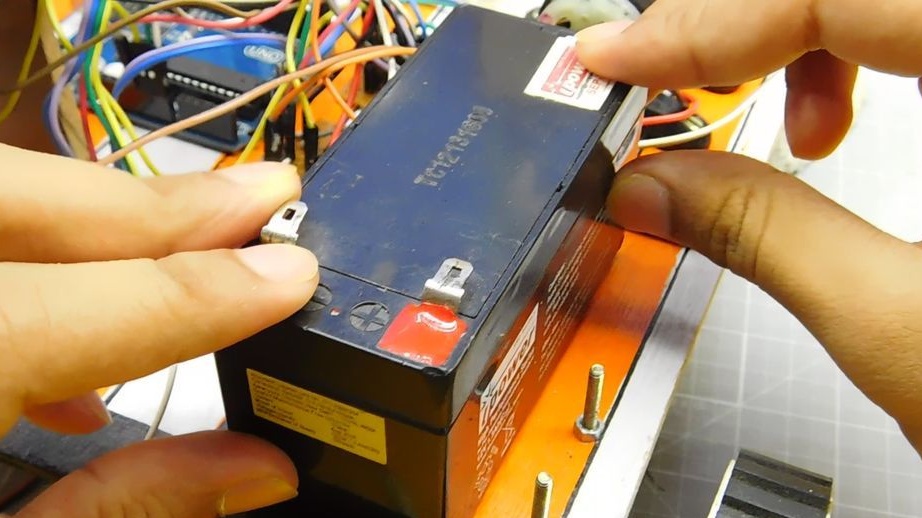
Pas vuit: Bateria
Assegura, mitjançant cinta de doble cara, la bateria de la plataforma. Connecta dispositius electrònics a la bateria. El mestre Arduino aconsella connectar-se mitjançant un divisor de tensió. També podeu afegir un commutador al circuit.

Nou pas: controlar el robot
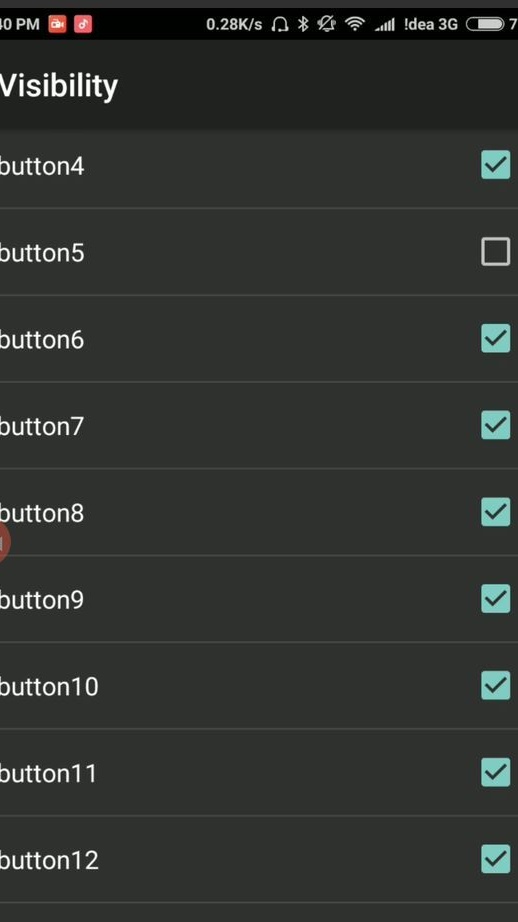
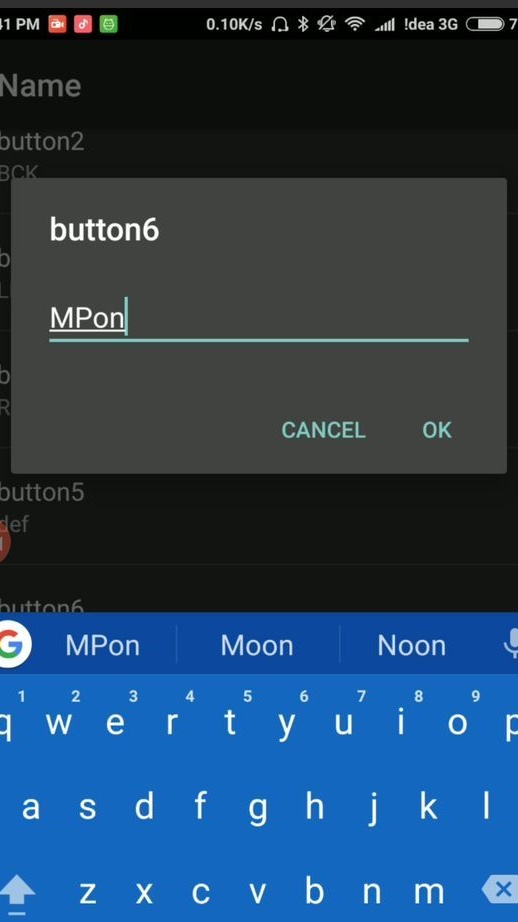
Des de Google Play, l'assistent descarrega l'aplicació "Bluetooth Serial Controller". Obre l'aplicació. Va a la configuració> visibilitat. Desactiva els botons 5, 9, 12. Va a noms. Assigna un botó de 2-3 lletres a cada botó. Vegeu la foto a continuació
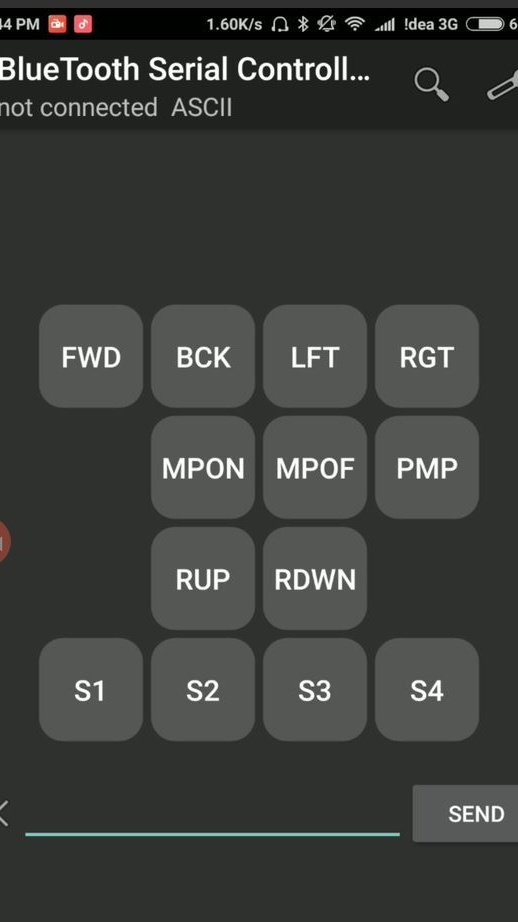
A continuació, cada botó instal·la una ordre (cal eliminar les pressupostes, no canviar de majúscules):
Botó 1 (FWD): "F"
Botó 2 (BCK): "B"
Botó 3 (LFT): "L"
Botó 4 (RGT): "R"
Botó 6 (MPON): "M"
Botó 7 (MPOF): 'm'
Botó 8 (PMP): "P"
Botó 10 (RUP): "U"
Botó 11 (RDWN): "u"
Botó 13 (S1): "1"
Botó 14 (S2): "2"
Botó 15 (S3): "3"
Botó 16 (S4): "4"
A les ordres de parada> ordres, només assigna ordres a aquests botons:
Botó 1: "S"
Botó 2: "S"
Botó 3: "S"
Botó 4: "S"
Botó 8: "p"

Ara queda connectar-se al mòdul bluetooth ("HC-05"), introduïu la contrasenya (1234 o 0000) i podeu provar de netejar l'habitació -)))
Gràcies al mestre mestre, i desitgem que millori el robot i aconsegueixi treballar completament autònom.
Al vídeo es pot veure tot el procés de muntatge del robot netejador.