


Probablement un dels projectes bàsics de arduino Sóc sensors d’aparcament. Però aquest article no descriurà la creació d’un sensor d’aparcament convencional, sinó sensors d’aparcament amb ajust manual de la distància crítica. En el procés de creació d’aquest dispositiu, augmentaràs les teves habilitats en circuits i programacions.
Els components principals:
• targeta arduino Nano / Uno
• Sensor de distància ultrasònic HC-CR04
• 6 LEDs
• 6 resistències a 220 ohms
• 2 resistències per 10 KOm
• 2 botons de rellotge
• picadora de piezo
• bord delirant
• fils de pare pare
• esponja de sabata (per al cas)
De les eines:
• soldadura
• termo-cola
Considereu l'algorisme del dispositiu
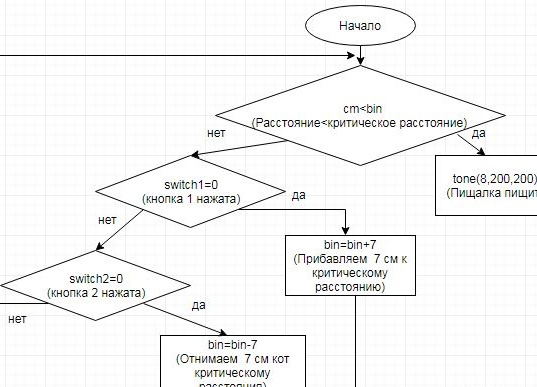
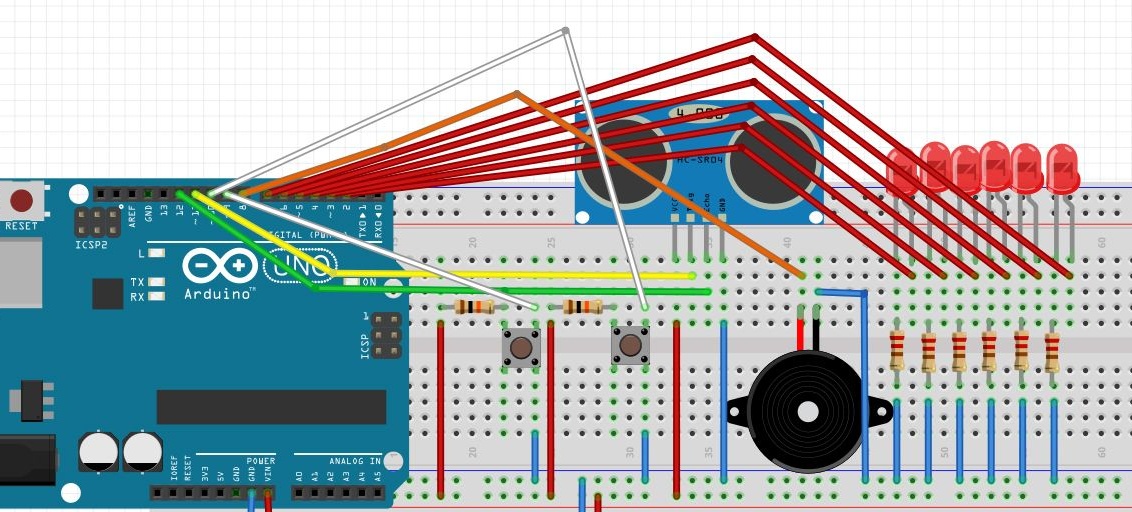
Després de veure l'algorisme, recollim l'esquema en un tauler delirant:
Des que vaig muntar el circuit al cas, es va decidir fer mini escuts de botons i leds.
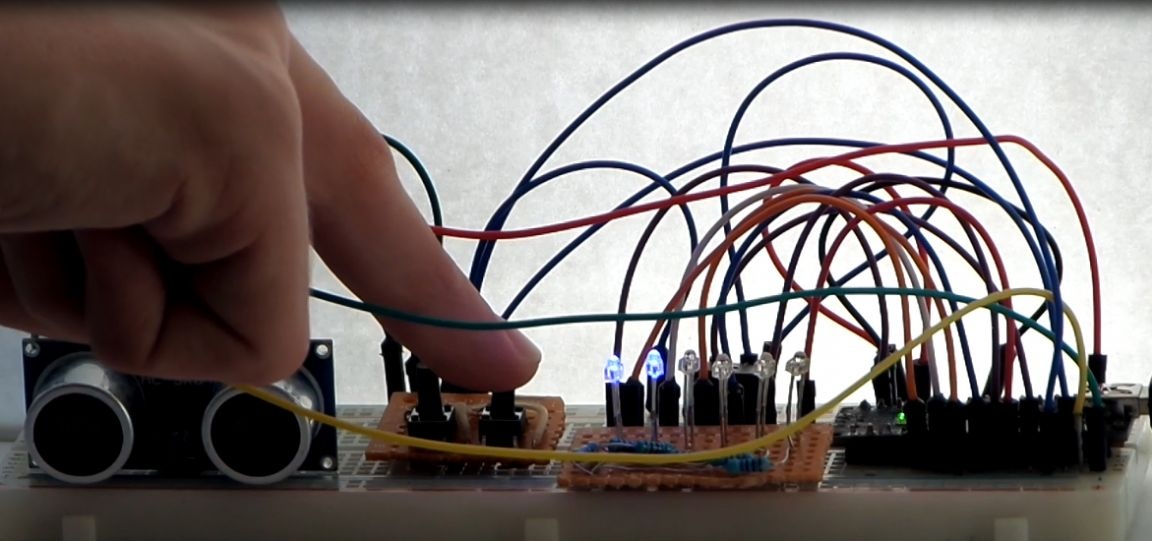
El cas de l’aparell estava fet d’una caixa d’una esponja per a sabates.
Sembla que el dispositiu és al seu interior.

Vegem el codi.
commutador int1 = 9; // Botó 1
interruptor int2 = 10; // Botó 2
pin pin = 2;
int bin = 40; // Distància crítica inicial en centímetres !!!
int echoPin = 12; // Pin de ressò del mòdul HC-SR04
int trigPin = 11; // Trigueu el mòdul HC-SR04
int buz = 8; // Pinça tweeter
booleà lBut1 = BAIX;
booleà lBut2 = BAIX;
boolean cBut1 = BAIX;
booleà cBut2 = BAIX;
void setup () {
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (switch1, INPUT);
pinMode (switch2, INPUT);
pinMode (2, OUTPUT); // LED 1
pinMode (3, OUTPUT); // LED 2
pinMode (4, OUTPUT); // LED 3
pinMode (5, OUTPUT); // LED 4
pinMode (6, OUTPUT); // LED 5
pinMode (7, OUTPUT); // LED 6
pinMode (8, OUTPUT); // Esqueixar
}
debat boolean (últim booleà)
{
current boolean = digitalRead (switch1);
if (last! = actual)
{
retard (5);
actual = digitalRead (switch1);
}
corrent de retorn;
}
debat boolean2 (boolean last2)
{
current boolean2 = digitalRead (switch2);
if (last2! = actual2)
{
retard (5);
actual2 = digitalRead (switch2);
}
retorn corrent2;
}
void loop () {
durada int, cm;
digitalWrite (trigPin, LOW);
delayMicrosegons (2);
digitalWrite (trigPin, HIGH);
delayMicrosegons (10);
digitalWrite (trigPin, LOW);
durada = pulseIn (echoPin, HIGH);
cm = durada / 58;
Serial.print (cm);
Serial.println ("cm");
retard (10);
cBut1 = rebut (lBut1);
if (lBut1 == BAIX i&CBut1 == HIGH)
{
pin = pin-1;
paperera = bin-7; // El nombre 7 significa restar a 7 cm de la distància crítica !!!
}
lBut1 = cBut1;
digitalWrite (pin, HIGH);
cBut2 = debounce2 (lBut2);
if (lBut2 == BAIX i&CBut2 == HIGH)
{
pin = pin + 1;
paperera = paperera + 7; // El número 7 significa l’addició de 7 cm de la distància crítica !!!
}
lBut2 = cBut2;
digitalWrite (pin, LOW);
if (cm 0)
{
to (8.200.200);
retard (300);
}
més
{
noTone (8);
}
} Els valors de la paperera es poden canviar per uns més convenients.
Com a resultat, el dispositiu realitza les seves funcions regularment.

Aquest article us ajudarà a fer els mateixos sensors d'aparcament sense gaire esforç.
Els desitjo molta sort a la repetició d’aquest dispositiu. Espero que el meu guia us sigui d’utilitat.