


Vaig prendre part del meu disseny de les instruccions de muntatge de Lego Technic 42049 i Lego Technic 42041. La resta és la meva improvisació. Per controlar, utilitzaré el mòdul Bluetooth associat al dispositiu o ordinador Android. Així que necessitem:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Conductor del motor L9110S
- 1 servoaccionador SG-90
- Mòdul Bluetooth HC-05 o equivalent
- USB-UART per a firmware arduino
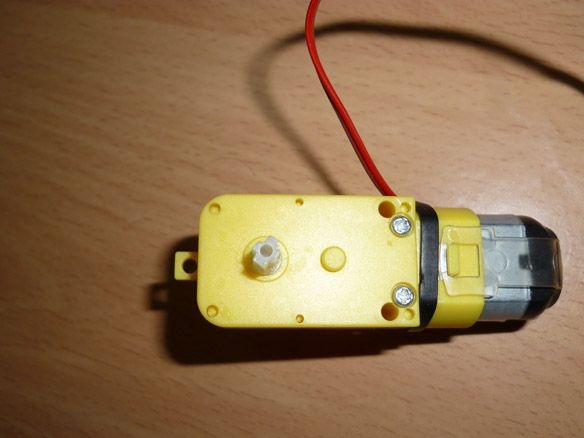
- Quadre del motor 6v 1: 150 100 rpm
- 2 LEDs
- 2 resistències 150 ohms
- Capacitor 10v 1000uF
- 2 pintes d'una sola fila PLS-40
- Inductor de 68mkGn
- 6 piles NI-Mn 1.2v 1000mA
- Connector pare-mare de dos pins a cable
- Homutik
- Cables de diferents colors
- soldadura
- Rosí
- soldadura
- Bolts 3x20, femelles i rentadores per a ells
- Bolts 3x40
- Bolts 3x60
Pas 1 Conjunt de l'eix posterior
Avançar-se enrere serà realitzat per un motor d’engranatges amb un motor de 6V, una relació d’engranatges d’1: 150 i una velocitat de ralentí de 100 rpm. Podeu provar una altra relació de velocitats, però, al meu parer, és òptim. L’eix de la caixa de canvis d’ambdós costats ha d’inceixar-se en forma de creu i posar-se en detalls de lego:
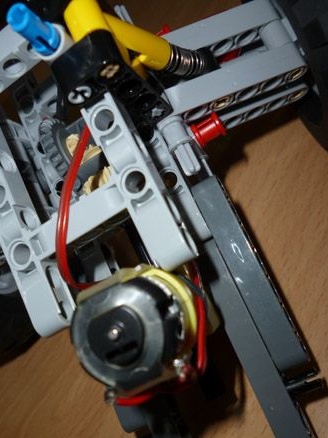
A continuació, recopilem la base de l’eix posterior segons les instruccions de Lego 42029 part 1, a partir de 3 pàgines fins a 8 incloses. Afegeix uns quants detalls perquè puguis instal·lar el motor i la caixa de canvis.
Veure fitxer en línia:
Veure fitxer en línia:



Pas 2 Muntatge de l’eix davanter
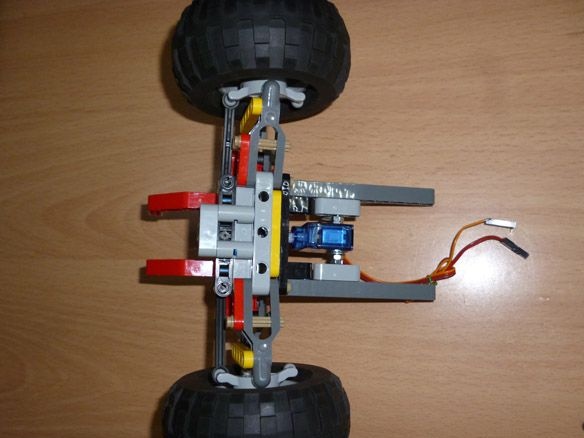
Muntem la part davantera de la suspensió segons les instruccions de Lego 42029 part 1, de la pàgina 21 a la 23. Prenem el trapezi de la segona part de Lego de la pàgina 6 a la 11. Servo SG-90 és molt adequat per girar les rodes. Per arreglar-lo al nostre model, és necessari perforar amb cura, per no tocar les parts internes del servo, un forat de pas amb un diàmetre de 3,2 mm o simplement tallar-lo amb un ganivet de papereria. I també tallar les parts que sobresurten ("ales" per fixar-les). Inserim un cargol al forat fet i el fixem amb femelles. A l’eix servo posem una palanca amb una part cargolada de lego:





Pas 3 Muntatge de la base i la cabina
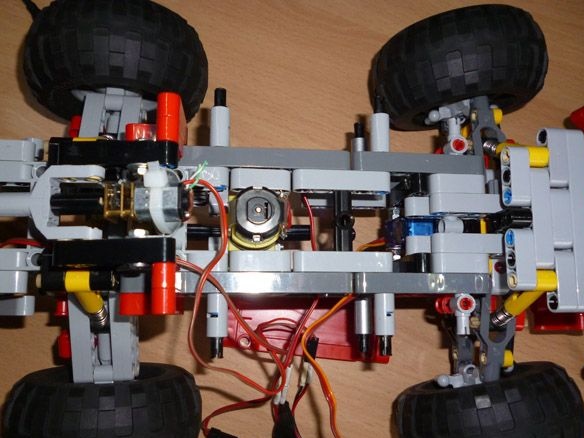
Connectem tots dos ponts com es mostra a la foto:
Muntem la cabina segons les instruccions de Lego 42041. A partir de les pàgines 39 a 47 de la primera part. Més allà de les pàgines 5 a 28 de la segona part. Així com el para-xocs de les pàgines 38 a 43 de la segona part de les instruccions.
Veure fitxer en línia:
Veure fitxer en línia:


Veure fitxer en línia:
Veure fitxer en línia:
Pas 4 Elèctriques
Per controlar, utilitzarem Arduino Pro Mini i el mòdul Bluetooth. El Pro Mini es pot substituir per qualsevol altre placa Arduino. Vaig triar el Pro Mini, així que és el més petit. El conductor del motor és necessari per connectar el motor.
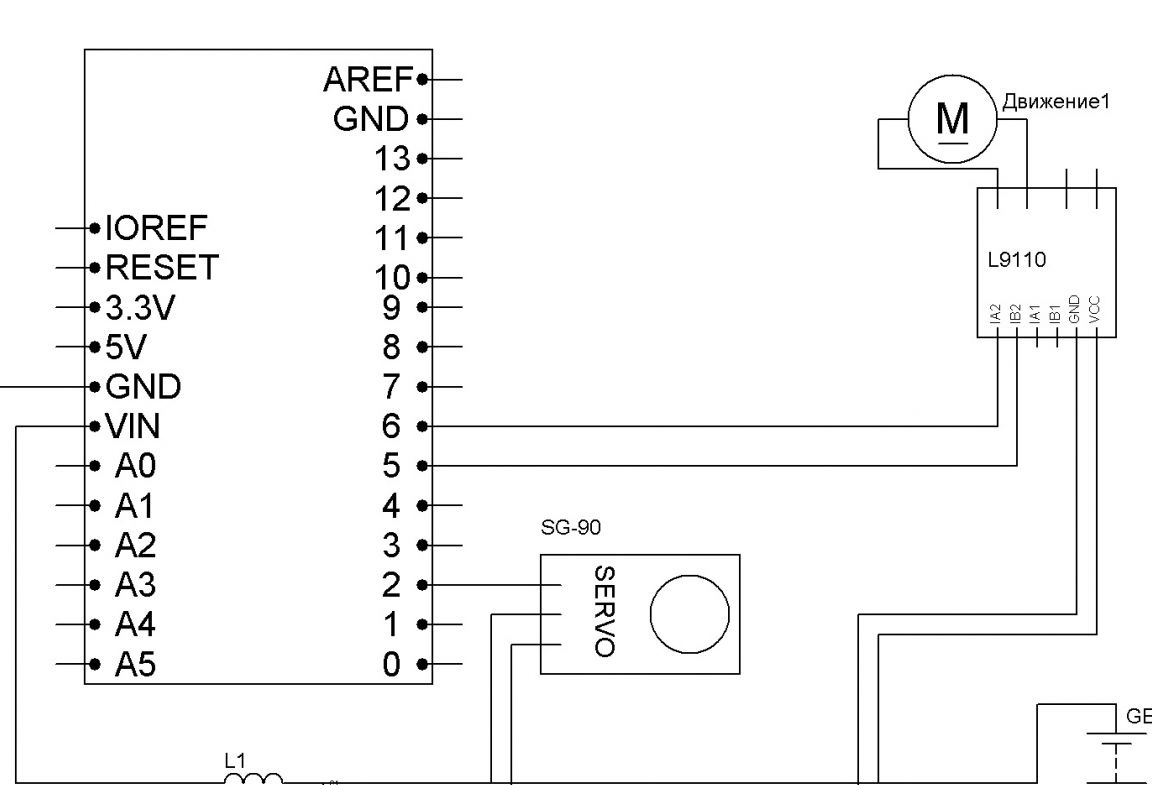
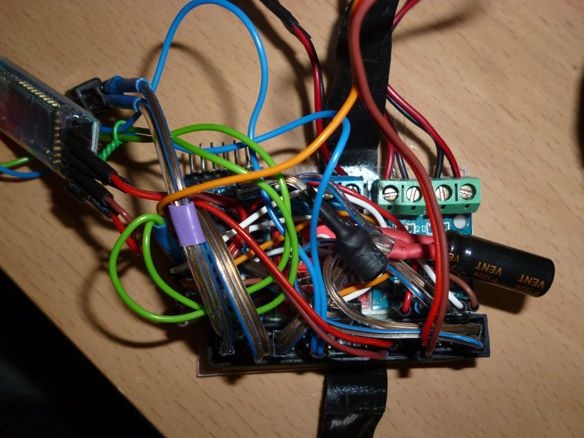
Connexió de tots els components amb cables de mare a mare de Dupont. Potència: 6 bateries NI-Mn 1.2v 1000mA connectades en sèrie. Un condensador de qualsevol potència baixa, un inductor que també trobareu, necessiteu estabilitzar la potència del microcontrolador. Els ànodes dels dos LED estan connectats a arduino de 4 pins, els càtodes a GND. Les resistències estan seleccionades per als LED utilitzats. Per comoditat, torneu les bateries amb cinta adhesiva.

Ho encolem tot sobre una cinta de doble cara a partir de:
Situem el nostre electricista entre les rodes i tanquem:
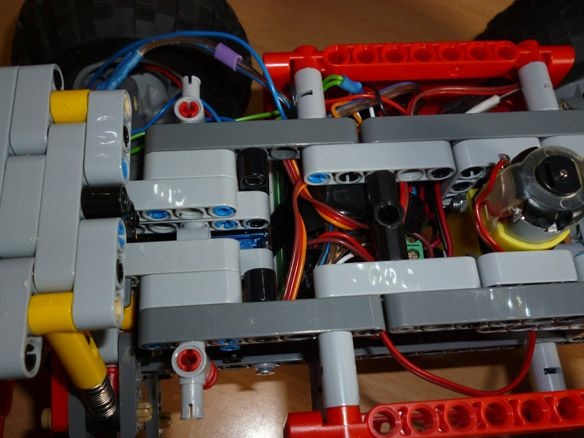
Afegiu un parell de cops:


Pas 5 Configuració del Bluetooth
Els mòduls Bluetooth més assequibles actualment són el HC-05 i el HC-06. Són abundants a les botigues en línia xineses. Les diferències entre ells són que el primer pot funcionar tant en mode mestre (esclau) com en mode esclau (mestre). El segon és un dispositiu purament esclau. En altres paraules, HC-06 no pot detectar un dispositiu emparellat i establir una connexió amb ell, només pot obeir el mestre.
Breus característiques dels mòduls:
- Xip Bluetooth - BC417143 fabricat per
- protocol de comunicació - Especificació Bluetooth v2.0 + EDR;
- radi d’acció: fins a 10 metres (nivell de potència 2);
- Compatible amb tots els adaptadors Bluetooth que admeten SPP;
- La quantitat de memòria flash (per guardar el firmware i la configuració) - 8 Mbit;
- la freqüència del senyal de ràdio - 2,40 .. 2,48 GHz;
- interfície d’amfitrió - USB 1.1 / 2.0 o UART;
- consum d'energia - el corrent durant la comunicació és de 30-40 mA. El valor actual actual és d’uns 25 mA. Un cop establerta la connexió, el corrent consumit és de 8 mA. No hi ha cap mode de suspensió.
Normalment, els mòduls es venen com a dues juntes soldades juntes. El més petit és un mòdul de fàbrica, molt utilitzat en diversos electrònica dispositius. Ampli: una placa especial per a bricolatge.
Això és el que semblen els mòduls de bricolatge HC-05 i HC-06:
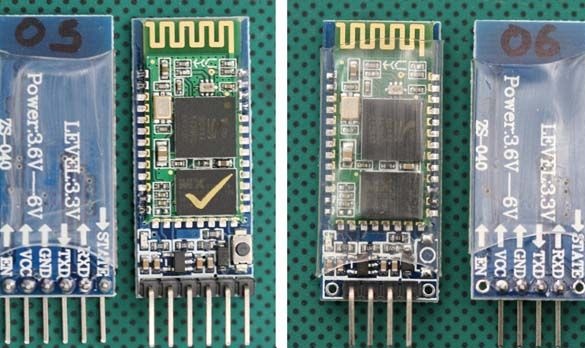
En principi, podeu fer servir qualsevol mòdul que vulgueu. Un mòdul sense placa de taula costa menys, però haureu de tenir cura de l’alimentació de 3,3 V del mòdul i atormentar-vos soldant cables al mòdul. Vaig triar l’òptim, al meu parer, en la relació preu / funcionament HC-06.
Ens connectem de la següent manera:
Arduino Pro Mini: Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Per a un correcte funcionament, cal configurar el mòdul. Configurarem les ordres AT introduïdes a la finestra del terminal. Dono un exemple de configuració del mòdul HC-05. Si teniu un paràmetre diferent pot ser diferent. Per tal que el nostre mòdul pugui rebre comandaments, primer flashem l’Arduino amb el firmware següent:
En aquest cas, Arduino actua com a pont entre els ordinadors i el mòdul. Al firmware, faig servir la biblioteca SoftwareSerial. A grans velocitats, funciona de manera inestable. Si voleu alta velocitat, podeu connectar el mòdul directament als contactes Arduino RX i TX i reescriure el firmware. Però en el meu cas, treballarem amb el mòdul a una velocitat de 9600. Així que, després del firmware, obriu el terminal i introduïu:
“AT” (sense cometes) hauria de sortir la resposta “OK” (significa que tot està connectat correctament i el mòdul funciona)
“AT + BAUD96000” (sense cometes) hauria de sortir la resposta “OK9600”.
Si teniu la resposta correcta, aneu al següent pas.
Firmware del pas 7
Per escriure el firmware i el mateix firmware, faig servir Arduino IDE. La versió actual d'avui és de 1,8. Realment el firmware:
Pas 8 Configura el teu telèfon.
En un telèfon Android, cal instal·lar un programa per controlar el robot mitjançant Bluetooth. Hi ha molts. Podeu entrar a "Bluetooth Arduino" a Google play i triar al vostre gust. Em va agradar el controlador de BT. Baixeu i instal·leu al vostre telèfon o tauleta Android. A continuació, mitjançant la configuració d’Android, heu d’establir una connexió amb el nostre mòdul. La contrasenya per a la connexió és "1234" o "0000". A continuació, configureu el programa per a les ordres adequades. La llista està a continuació.
Pas 9 Configuració de l’ordinador (si cal)
Si cal, o només per comoditat, podeu utilitzar un ordinador o un ordinador portàtil. Per fer-ho, l’ordinador ha de tenir Bluetooth. Establim comunicació amb el nostre mòdul mitjançant els controls a l’ordinador. A continuació, necessitem un terminal per enviar ordres. Qualsevol que sigui convenient per a vostè.Després d'haver enregistrat el firmware, el control es realitza mitjançant els següents botons (ordres):
W - endavant
S - enrere
A - esquerra
D - dreta
F - parada
G - volant
K - fars
L - llum del far apagada
Introduir ordres constantment no és convenient, així que recomano utilitzar el programa per enviar ordres. Estic utilitzant Z-Controller. Al programa, seleccioneu el port (port com a través del qual es fa la connexió) i configureu les tecles per a les ordres. Configuració ociosa i intuïtiva.
