


Vaig prendre part del meu disseny de les instruccions de muntatge de Lego Technic 42029. La resta és la meva improvisació. Així que necessitem:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (millor que Populus, però també podeu tenir una contrapartida xinesa)
- 2 servomotors SG-90
- Receptor IR
- Quadre del motor 200 rpm
- 2 LEDs
- 2 resistències 150 ohms
- Capacitor 10v 1000uF
- 2 pintes d'una sola fila PLS-40
- 2 connectors PBS-20
- Inductor de 68mkGn
- 6 piles NI-Mn 1.2v 1000mA
- Connector pare-mare de dos pins a cable
- Homutik
- Cables de diferents colors
- soldadura
- Rosí
- ganivet de papereria
- soldadura
- Bolts 3x40 i femelles i rentadores per a ells
- Bolts 3x60
- Bateries Ni-Mn 1.2v 1000mA 6pcs.
Primer pas recollim la part posterior de la suspensió.
Primer, cal muntar la suspensió posterior segons les instruccions de Lego 42029 part 1, a partir de 3 pàgines i 8 incloses. A continuació, afegiu uns quants detalls perquè pugueu instal·lar el motor i la caixa de canvis.

2ª suspensió frontal.
Muntem la part davantera de la suspensió segons les instruccions de Lego 42029 part 1, de la pàgina 21 a la 23. Prenem el trapezi de la segona part de les instruccions de Lego de la pàgina 6 a la 11. Muntem el cabrestant de la segona part de la pàgina 14 - 22. I la segona part del para-xocs és de 34 a 36 pàgines.
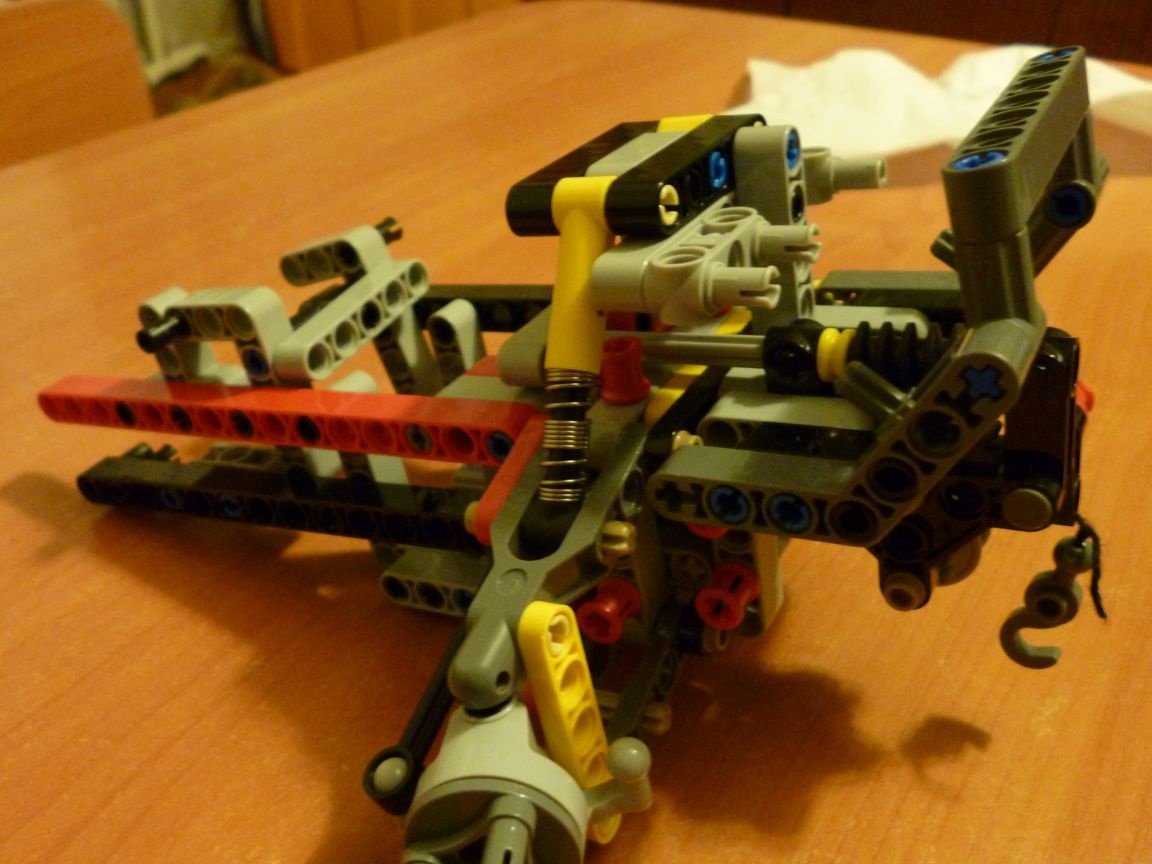

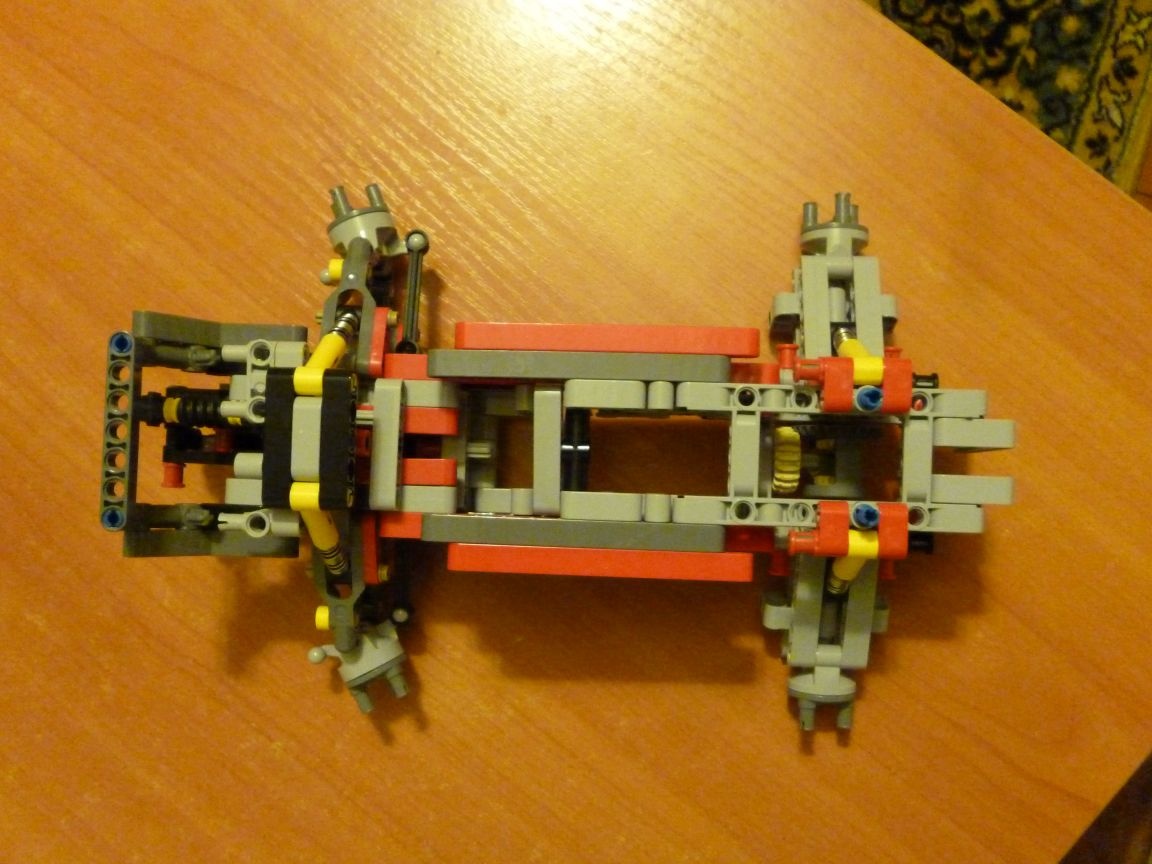
El pas 3 muntem el xassís.
Connectem les dues parts com es mostra a la foto:

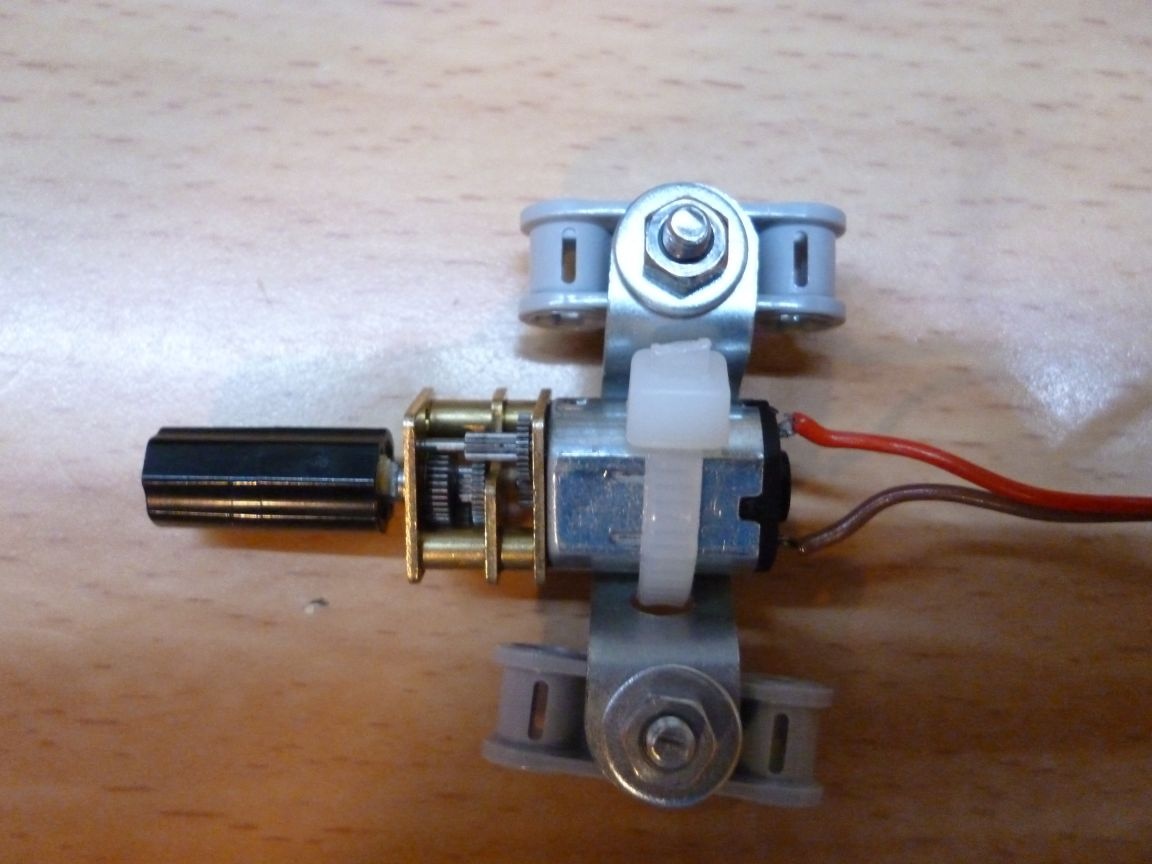
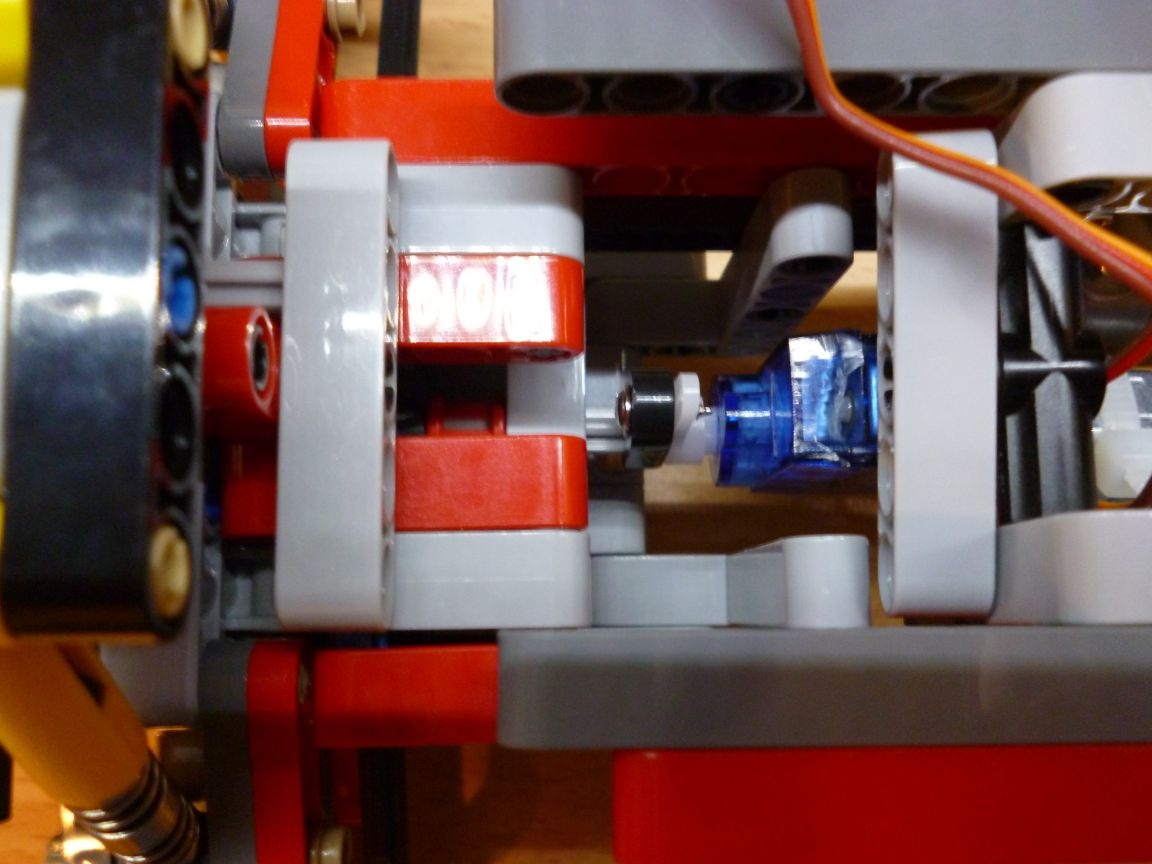
He solucionat el problema de connectar el motor del canvi amb les parts del dissenyador de la següent manera: he posat el manguito de connexió a l’eix del motor de canvi i he inserit una peça de llum per fixar-la. Per al muntatge del motor d’engranatges s’utilitza plàstic metàl·lic d’un dissenyador de ferro i una abraçadora.
Va resultar el següent:
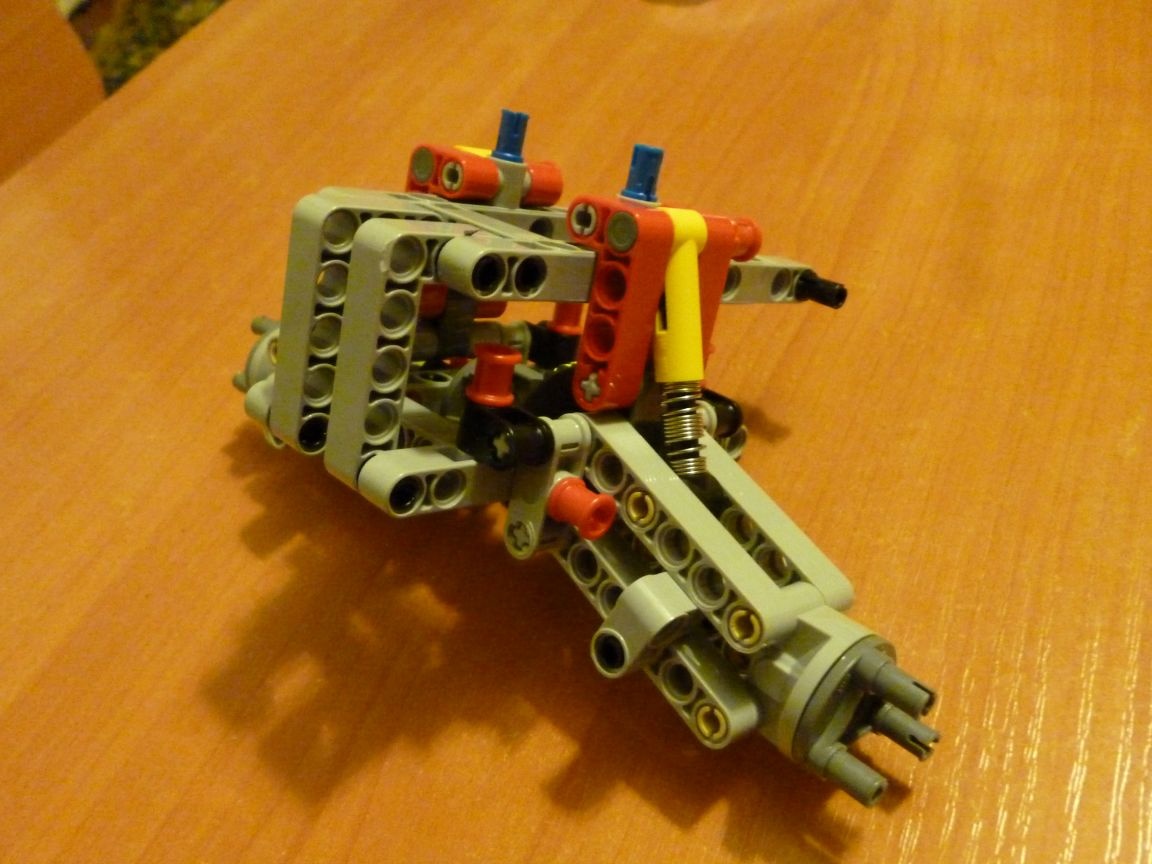
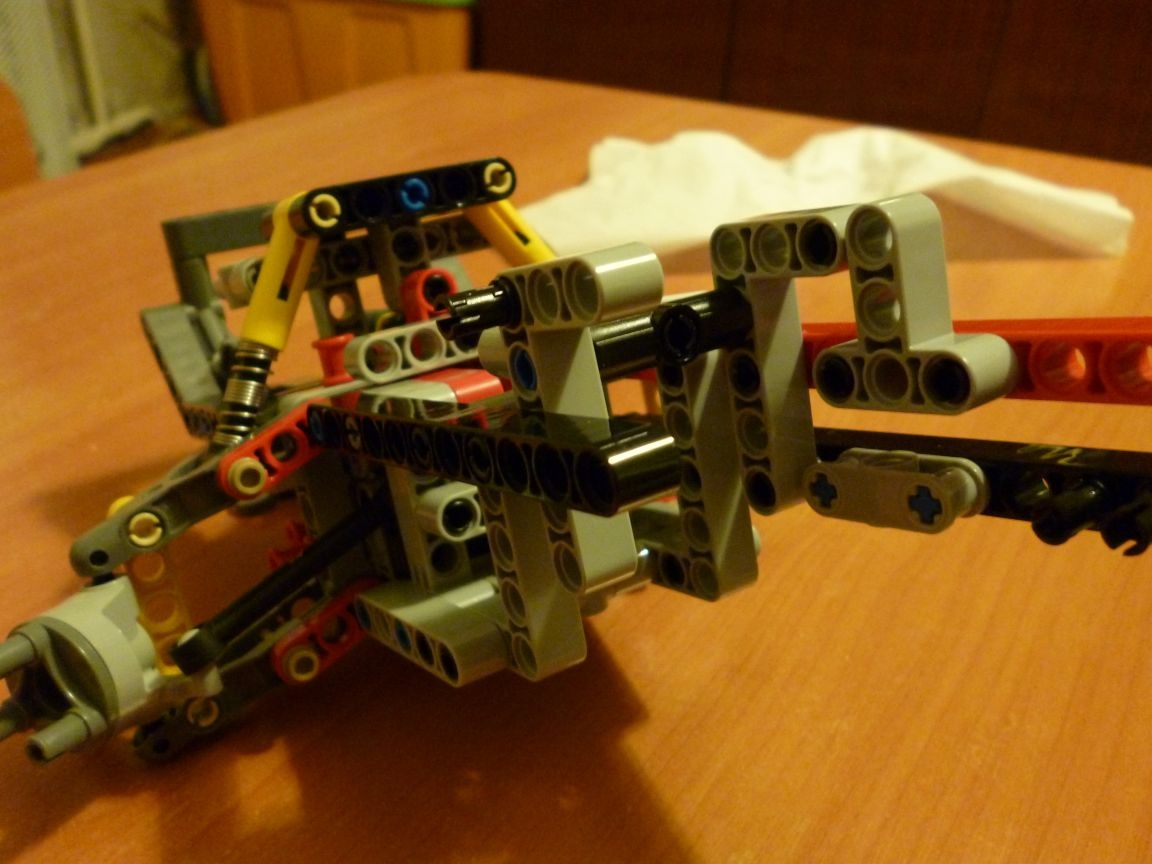
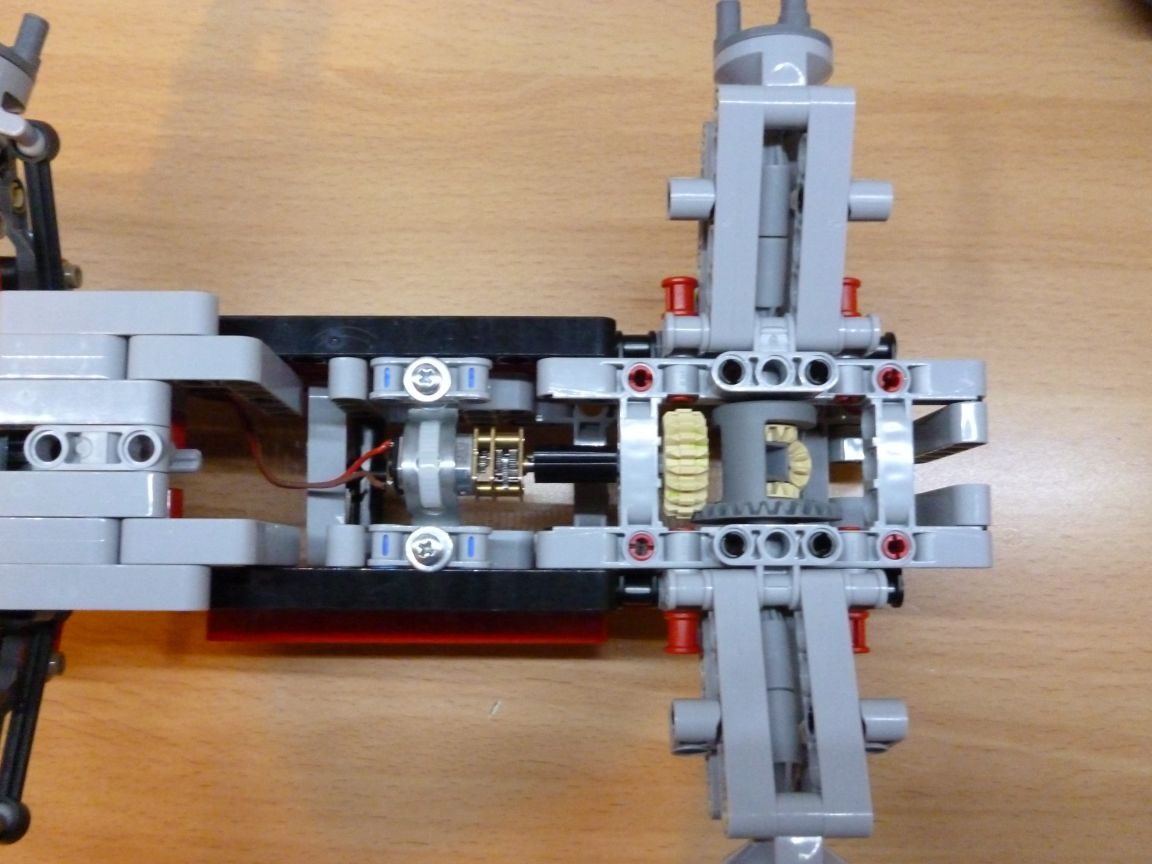
Muntar el xassís:
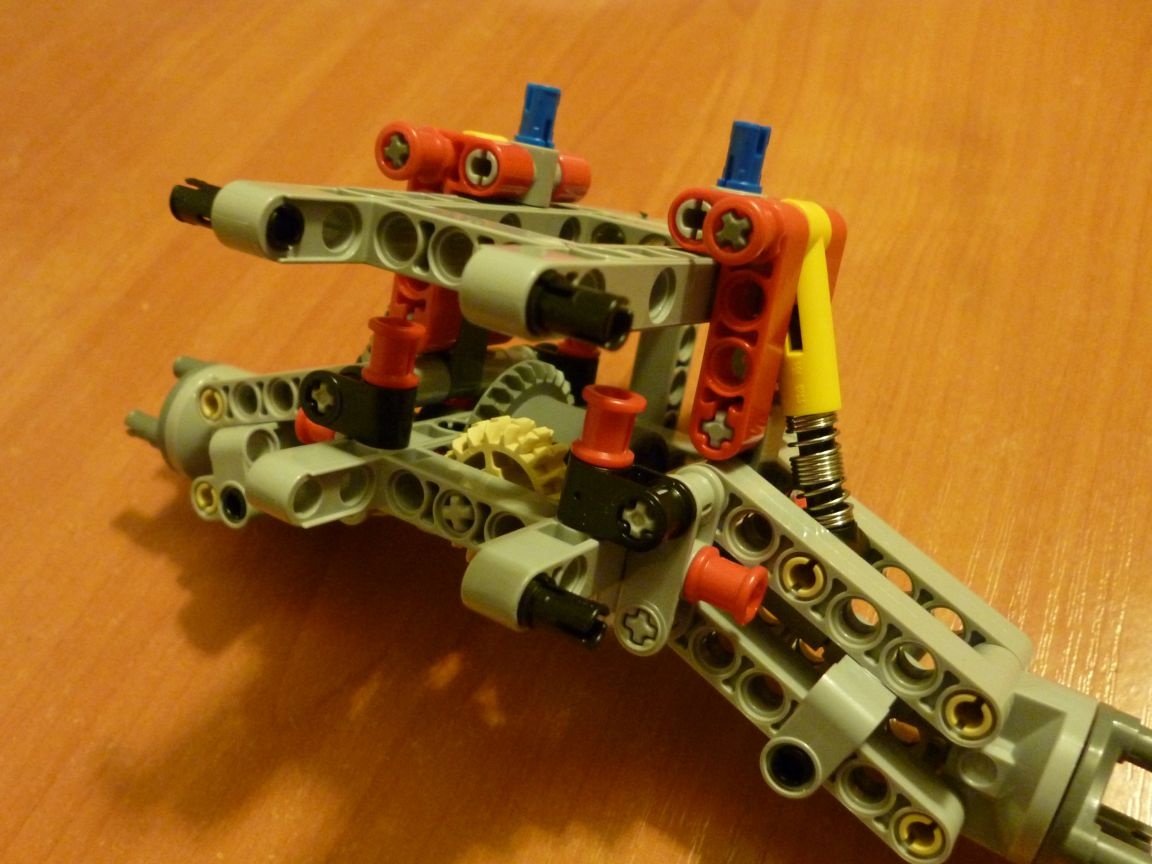
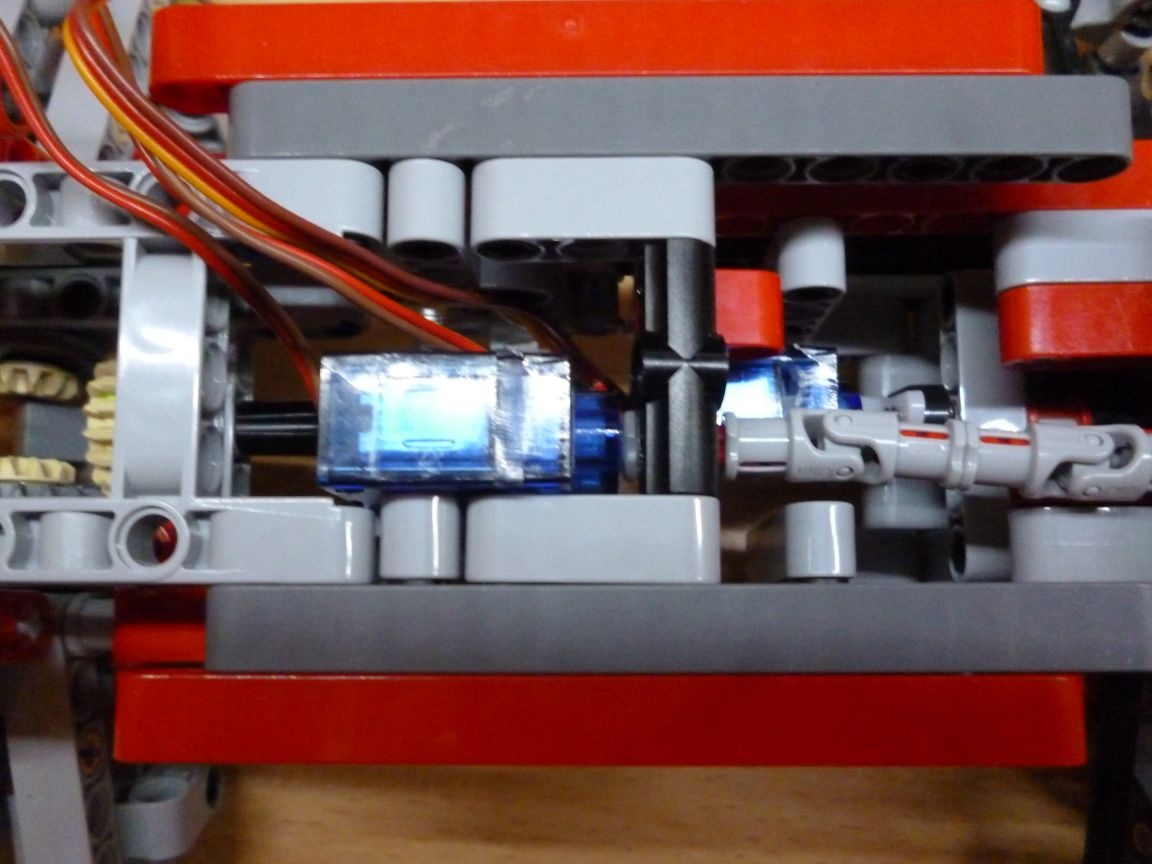
Per dur a terme la rotació es va prendre el servo SG-90. Cal perforar amb cura, per no tocar les parts internes, un forat de pas amb un diàmetre de 3,2 mm o simplement tallar-lo amb un ganivet de papereria. I també tallar les parts que sobresurten ("ales" per fixar-les). Inserim un cargol al forat fet i el fixem amb femelles. A l’eix servo posem una palanca amb una part cargolada de lego:
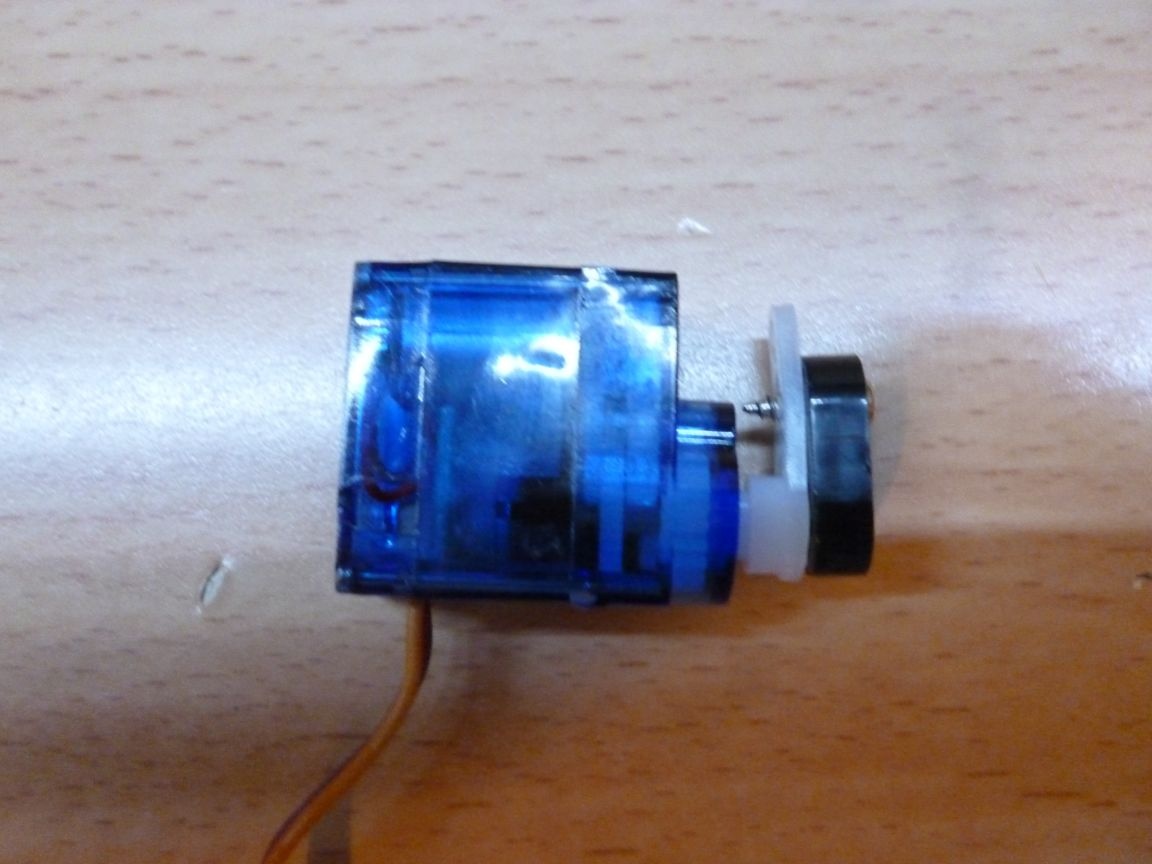
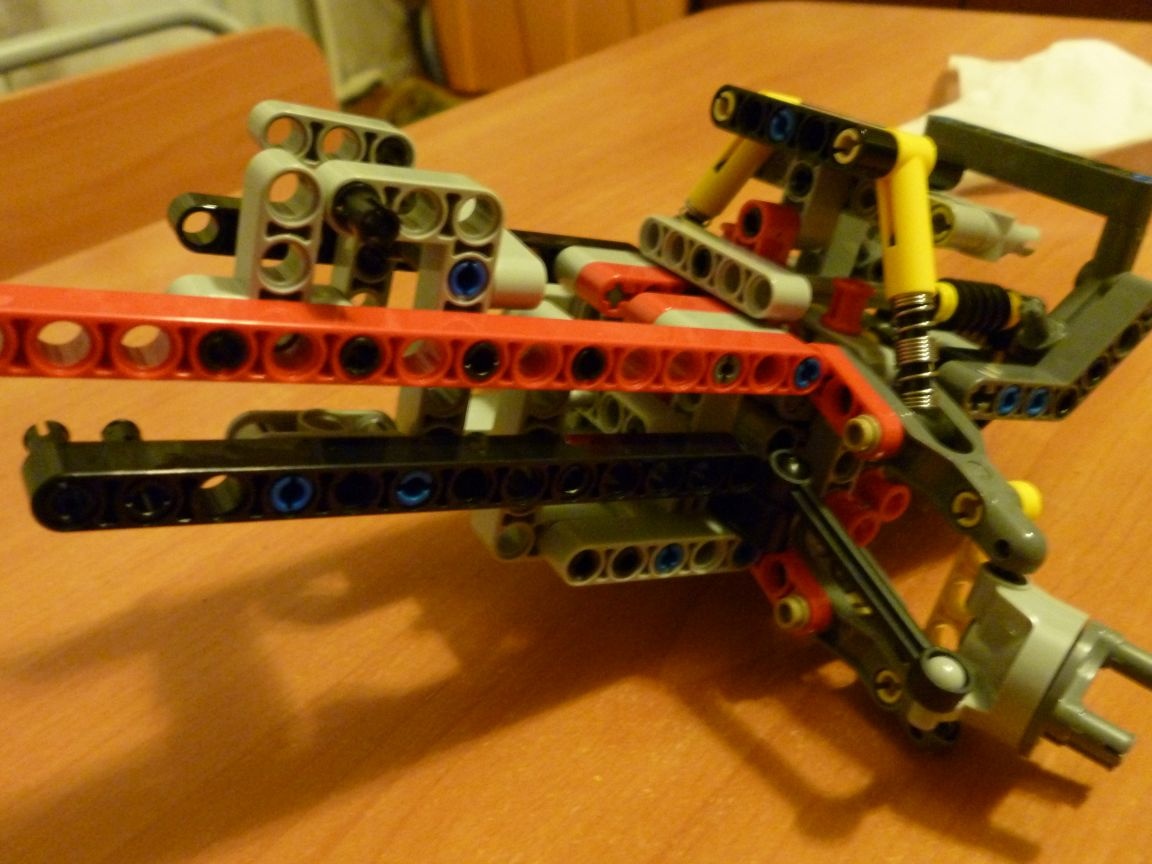
Instal·leu:
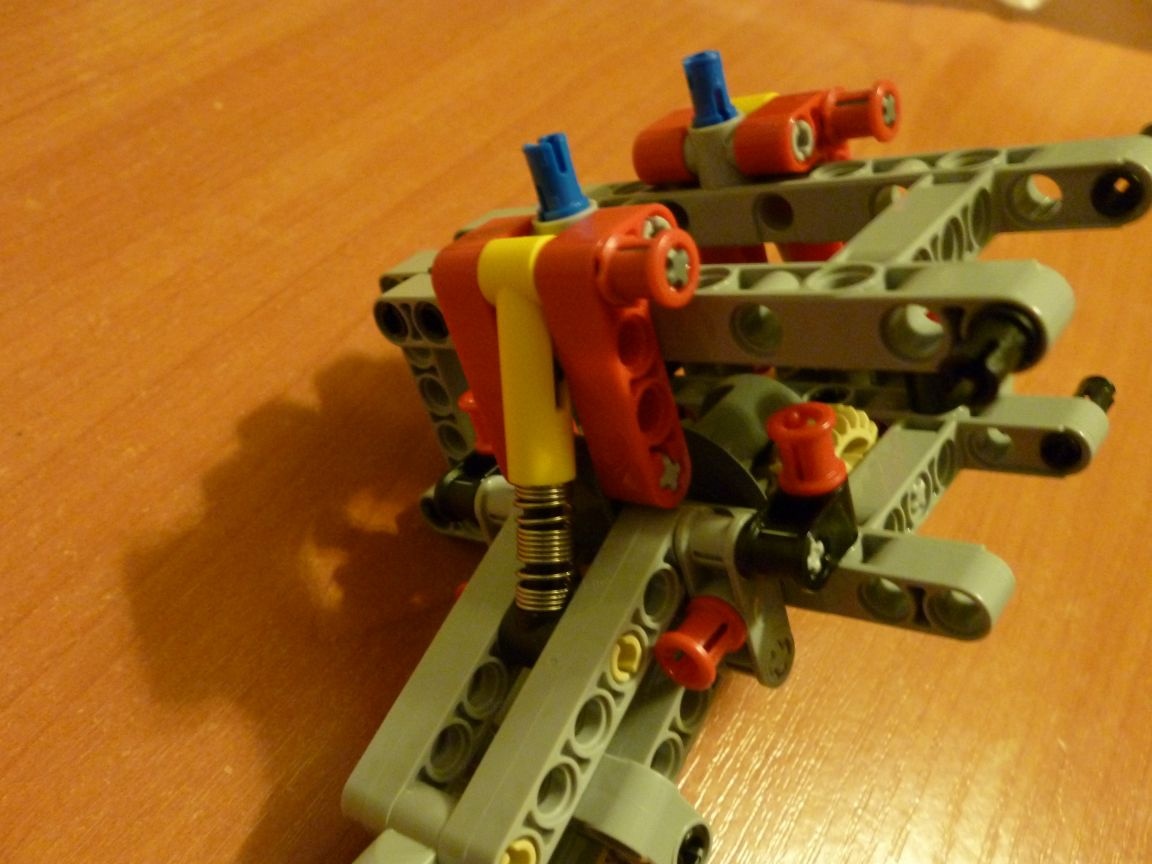
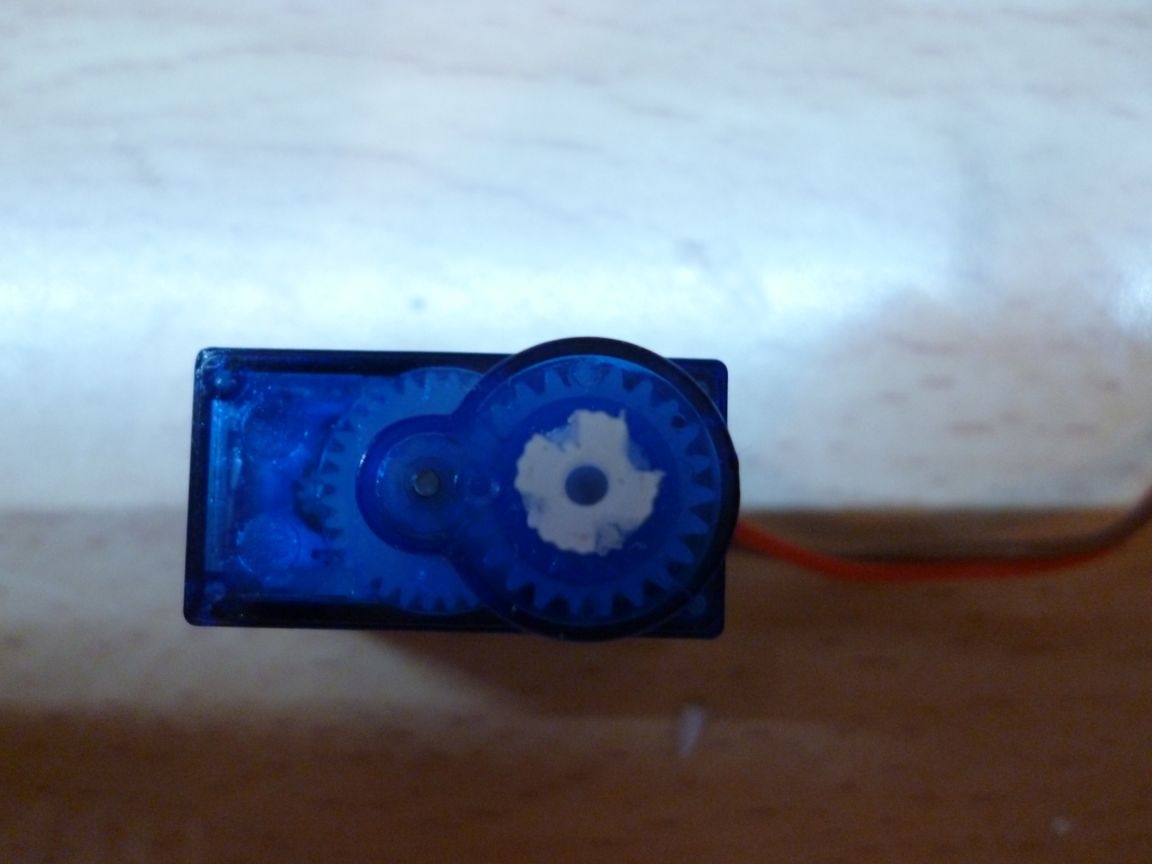
Utilitzarem el segon servo per al cabrestant. Fem el mateix que amb el primer. I ara, cal modernitzar-la perquè giri lliurement. Per fer-ho, desmuntem el servoaccionament, traiem la placa i soldem els cables directament al motor. Traiem l’engranatge principal i tallem les parades de viatge.I finalment, fem una ranura amb un ganivet clerical a l’engranatge principal com a la foto:
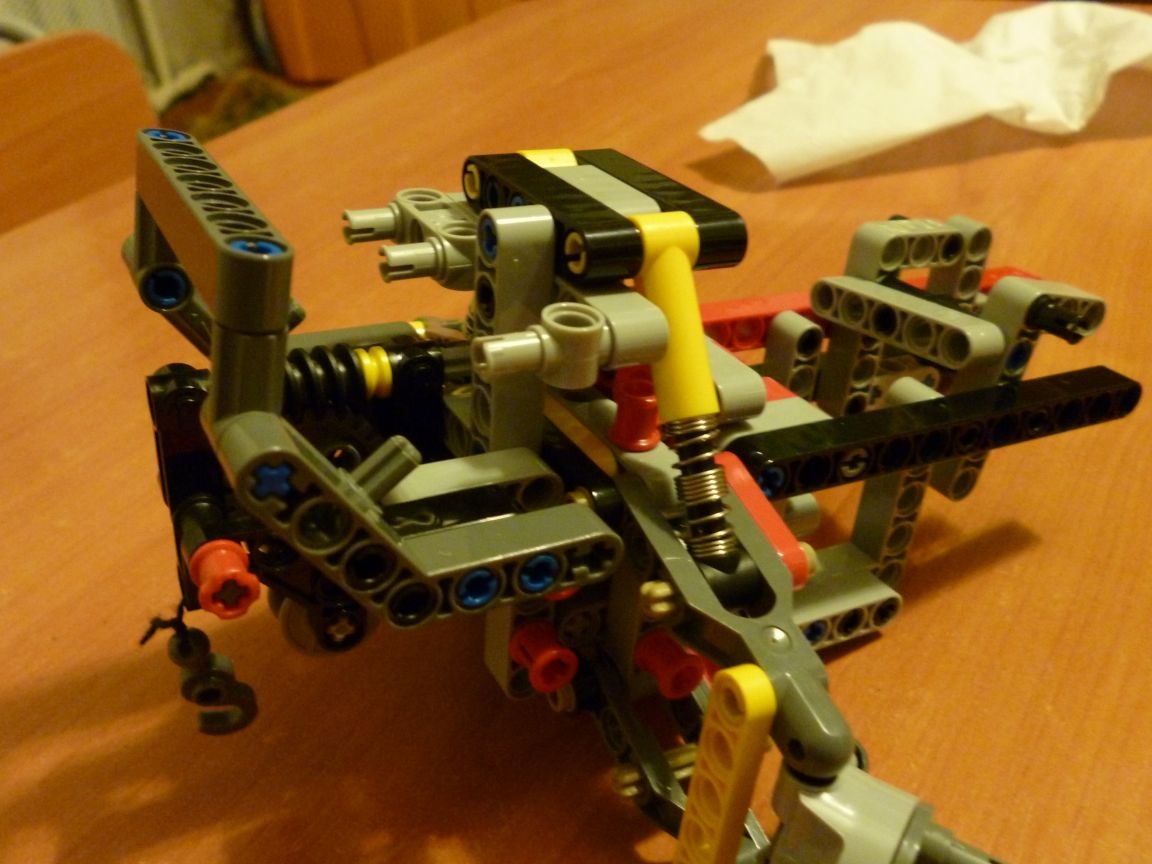
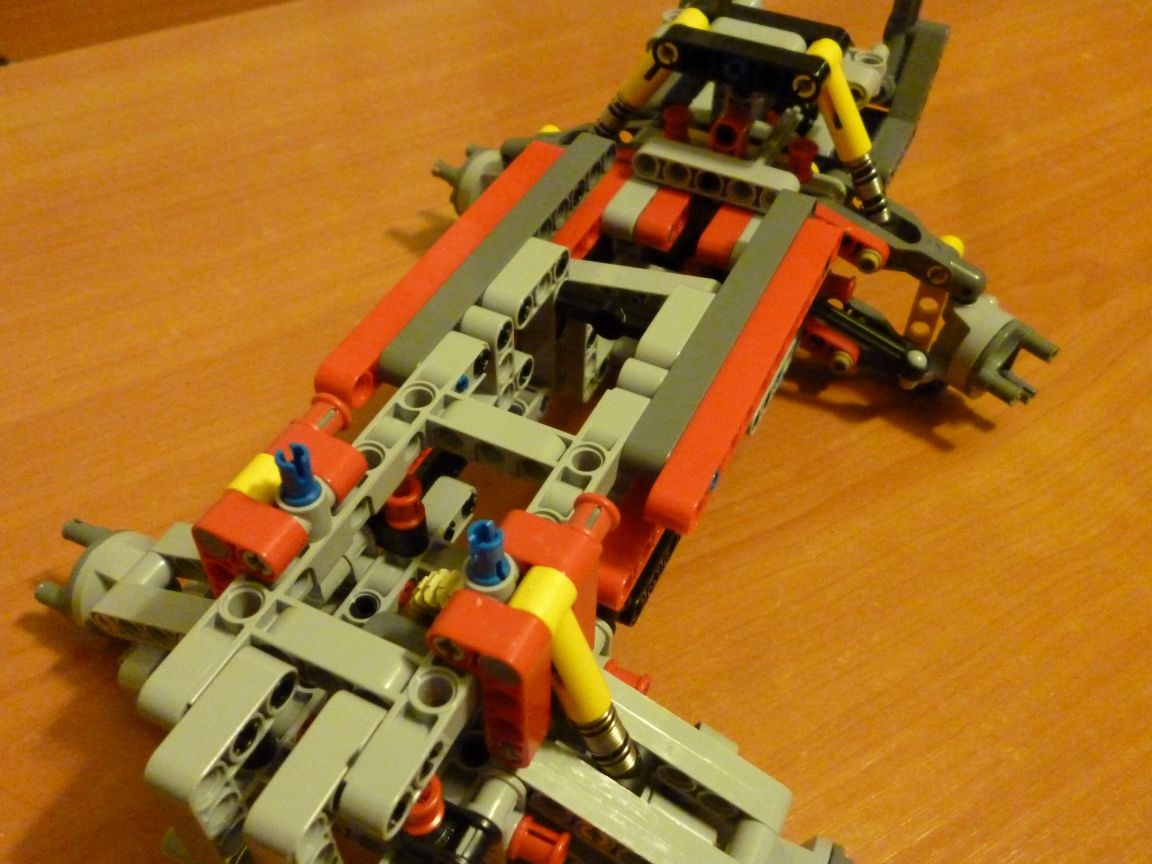
Ens connectem al nostre cabrestant i posem el xassís:

Pas 4 Gestió del controlador
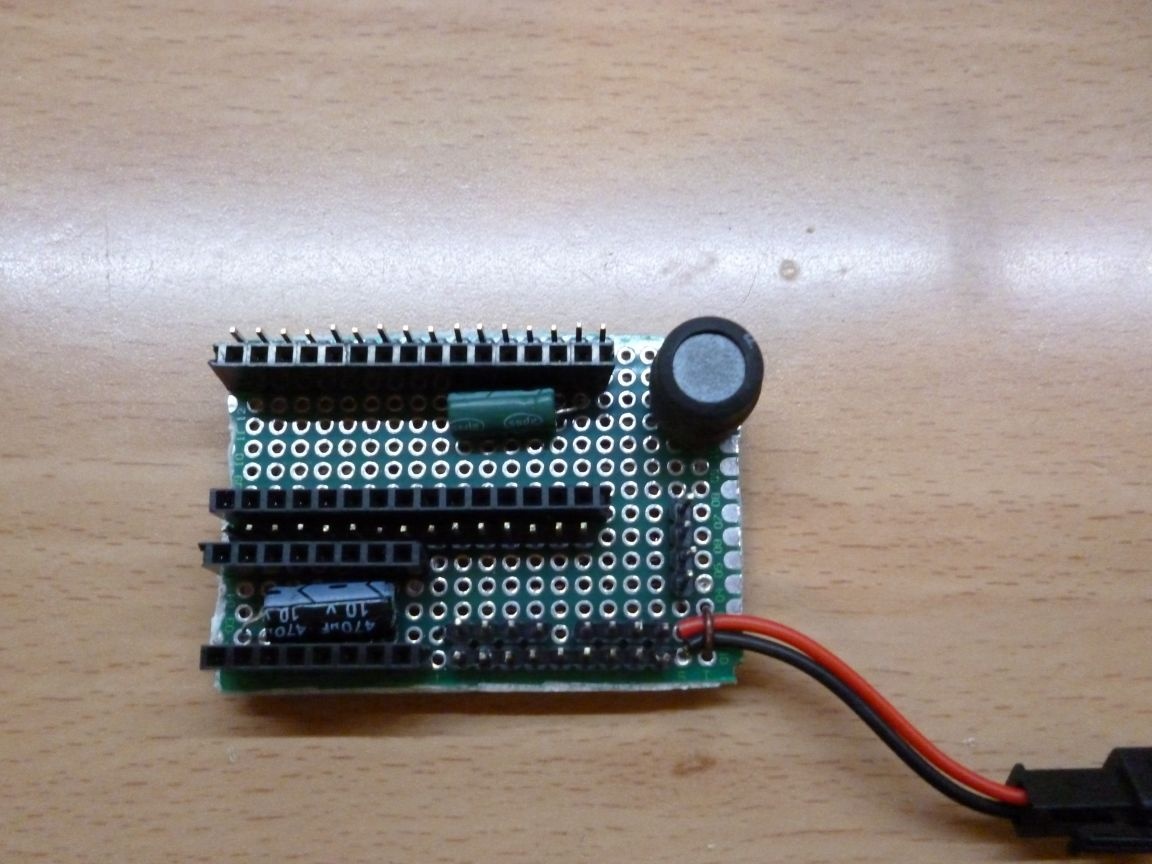
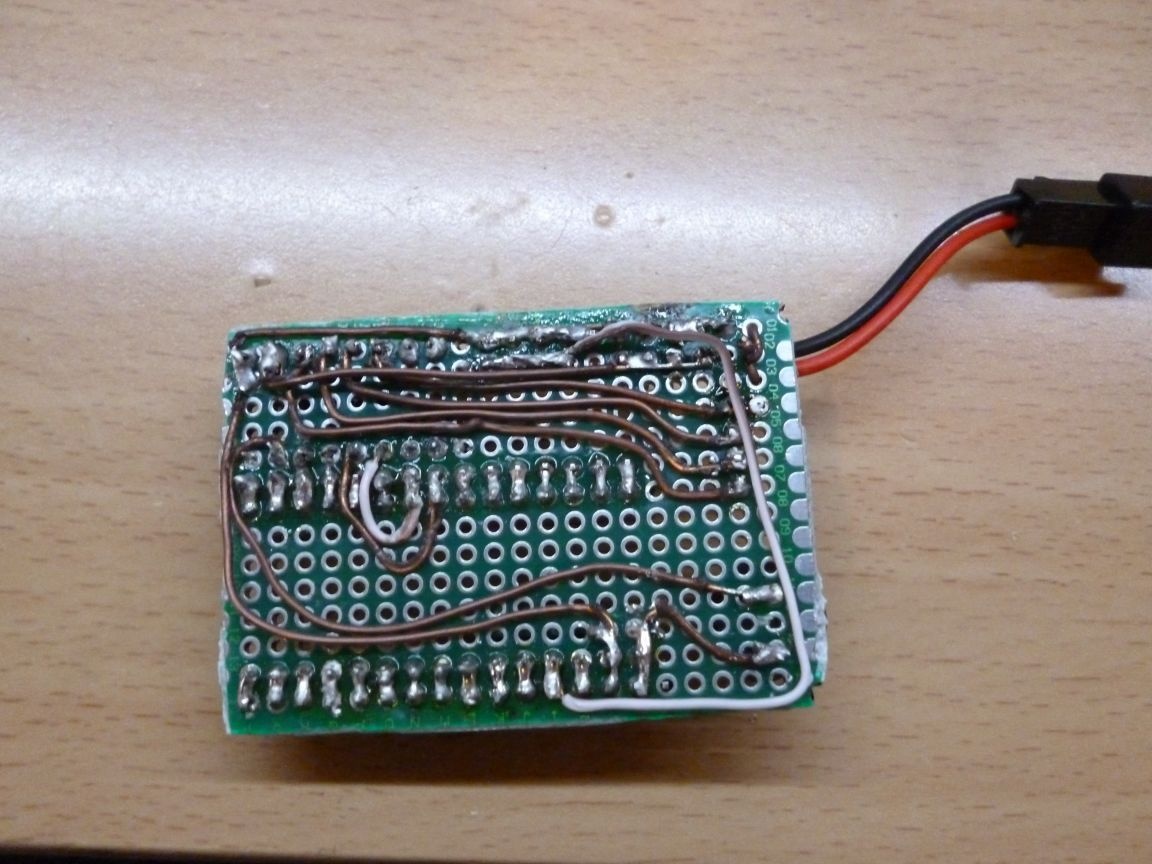
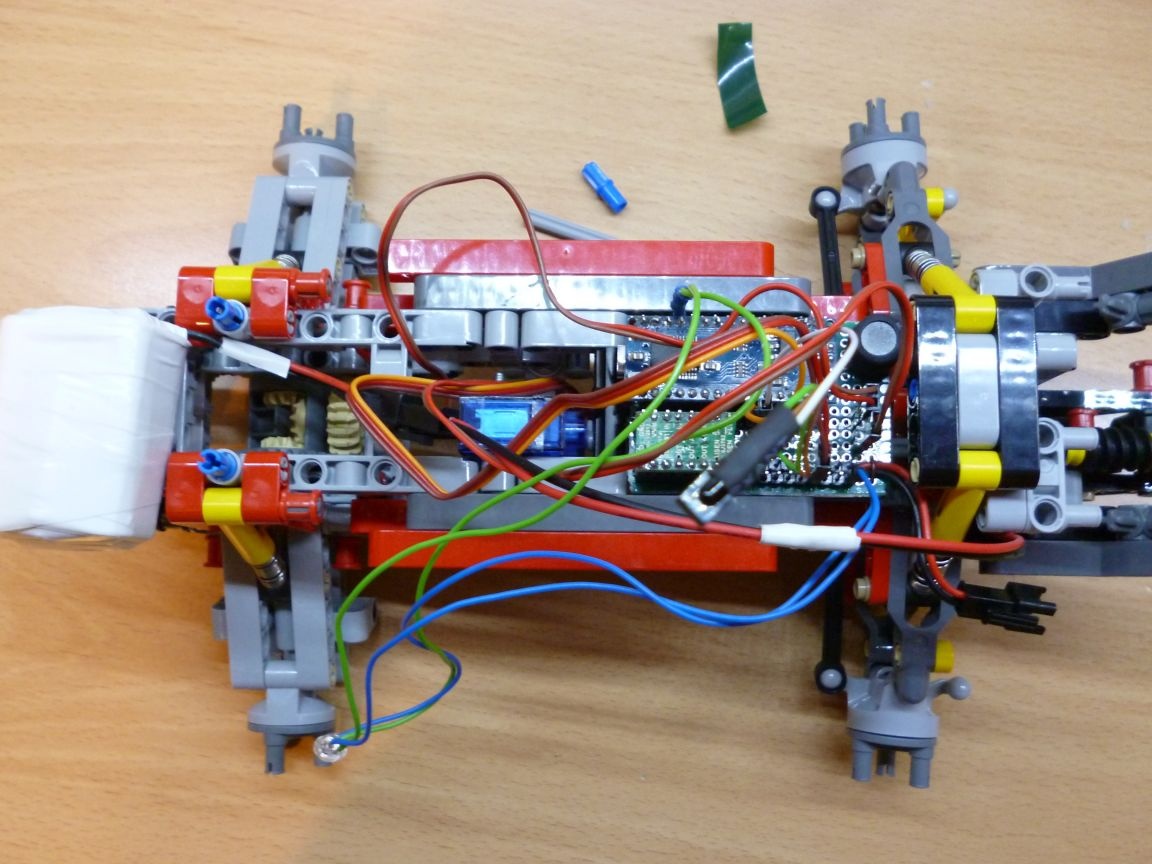
Per controlar utilitzarem receptor Arduino i IR. Agafem una soldadura i muntem el següent a la placa de circuit:
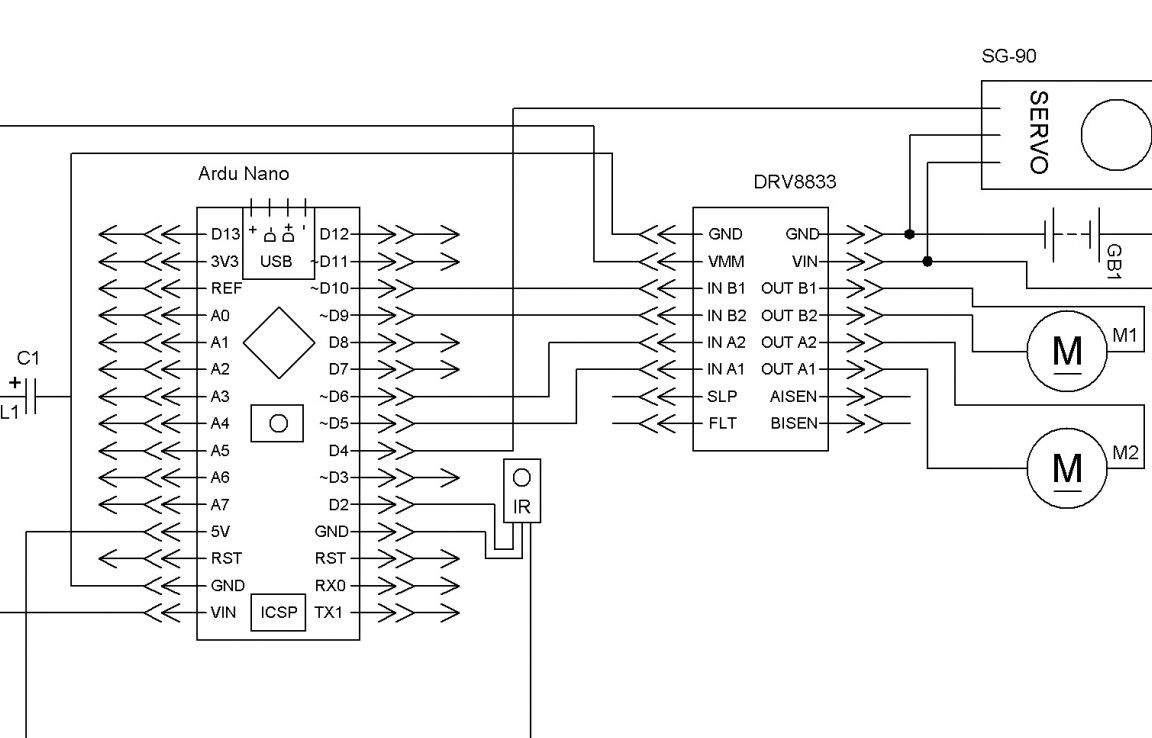
Els explico: qualsevol condensador de poca potència, la bobina d’inductància que també trobareu, necessiteu estabilitzar la tensió del microcontrolador. Les resistències estan seleccionades per als LED utilitzats. El receptor d’IR o TSOP es pot agafar d’una joguina antiga o comprar en una botiga de ràdio. Si hi ha interferències fortes, afegiu un condensador al circuit d’alimentació del receptor IR.
Com a resultat, obtenim:
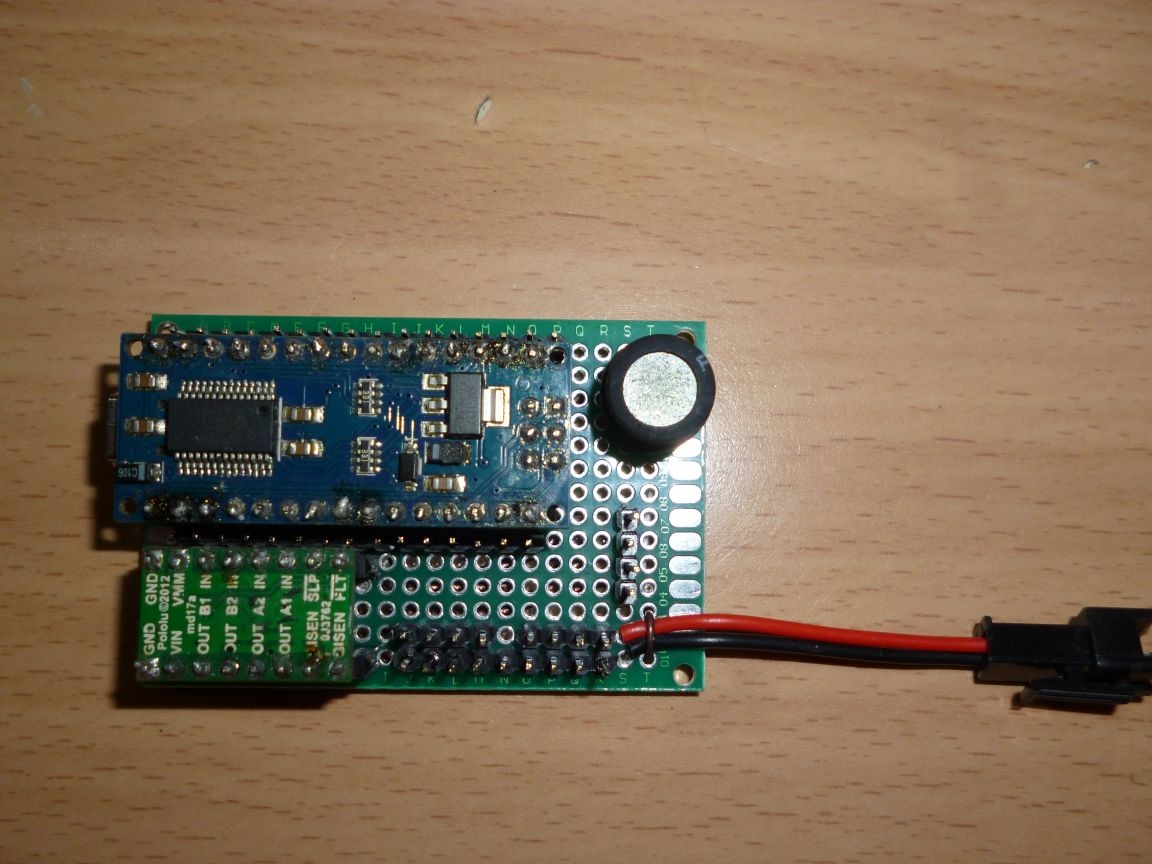
Instal·lem Arduino Nano i DRV 8833 als seus llocs:
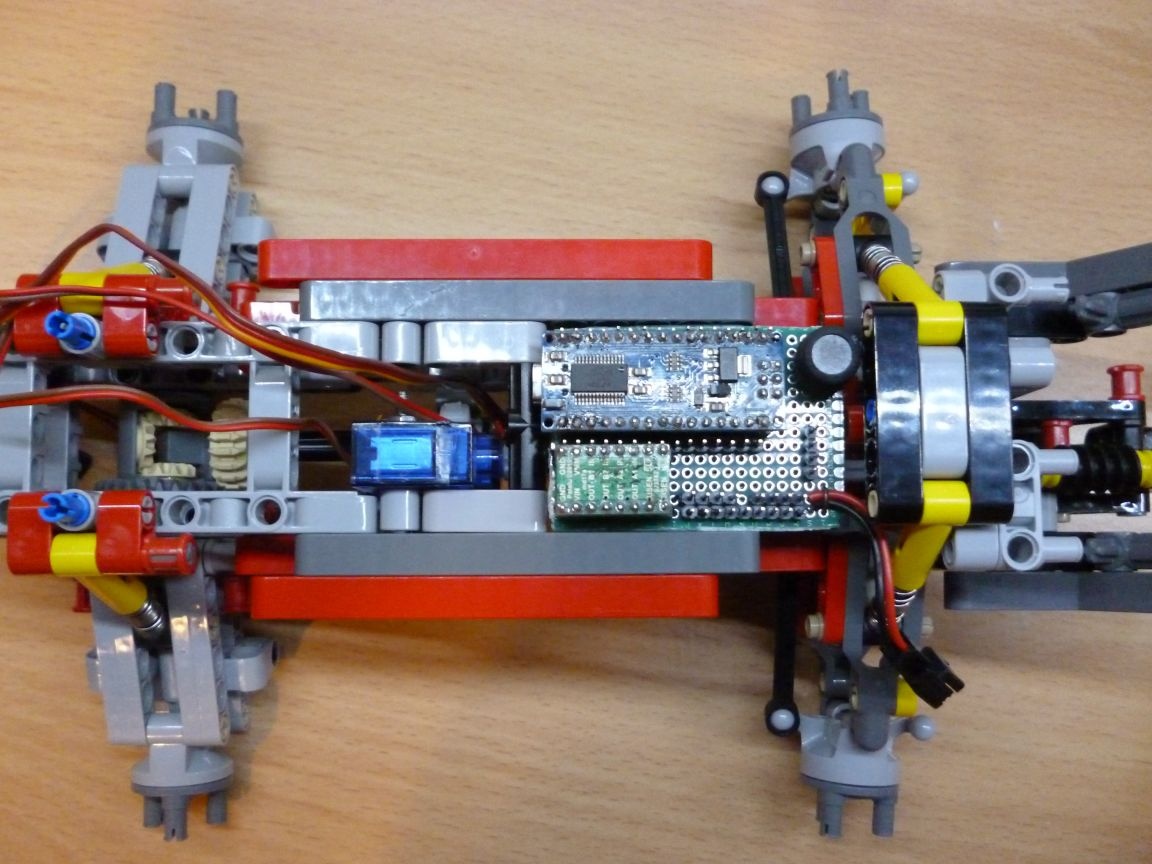
I poseu el tauler al xassís:
Alimentació: 6 piles Ni-Mn 1.2v 1000mA. Cal soldar-les en sèrie i enrotllar-les amb cinta elèctrica. Cola sobre cinta de doble cara a la part posterior del xassís.
Connectem tota l’estructura:
Pas 5 Cabina
La cabina és personalment la meva improvisació, no hi ha instruccions preparades, per tant, heu de recollir fotografies.



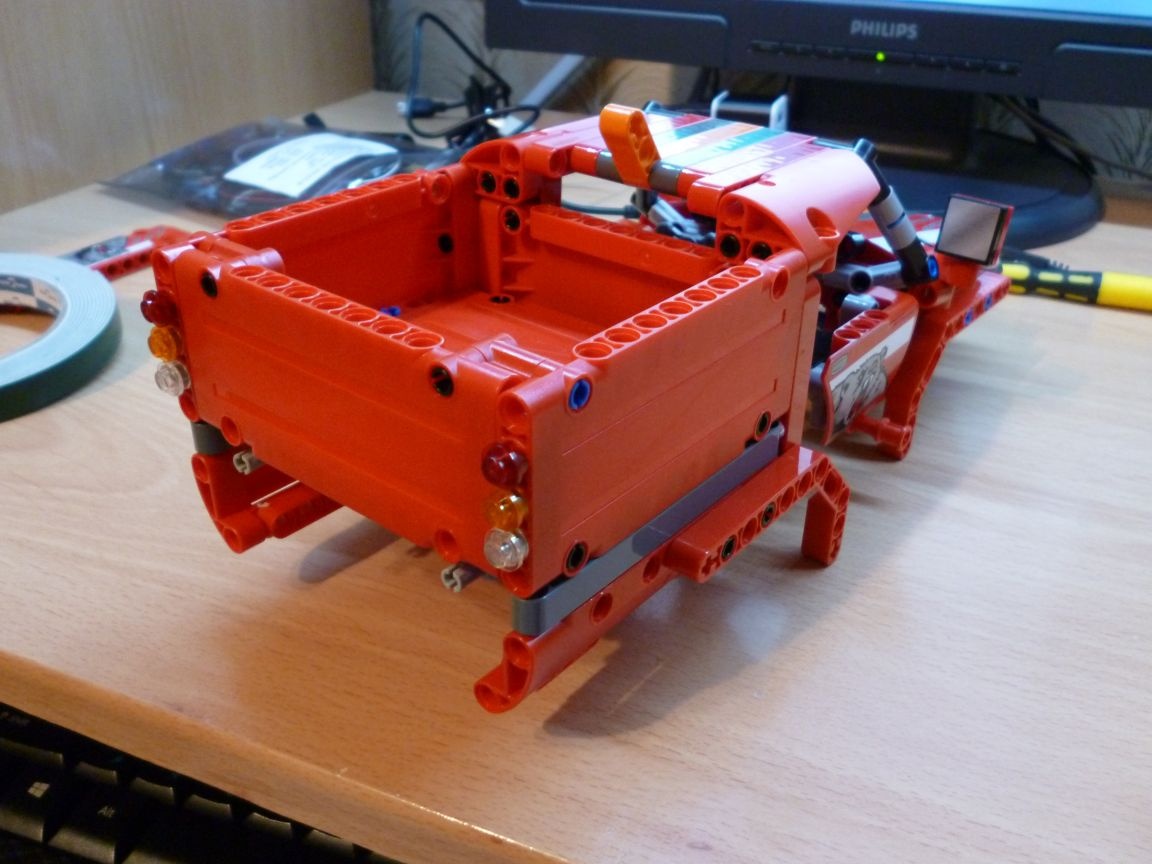
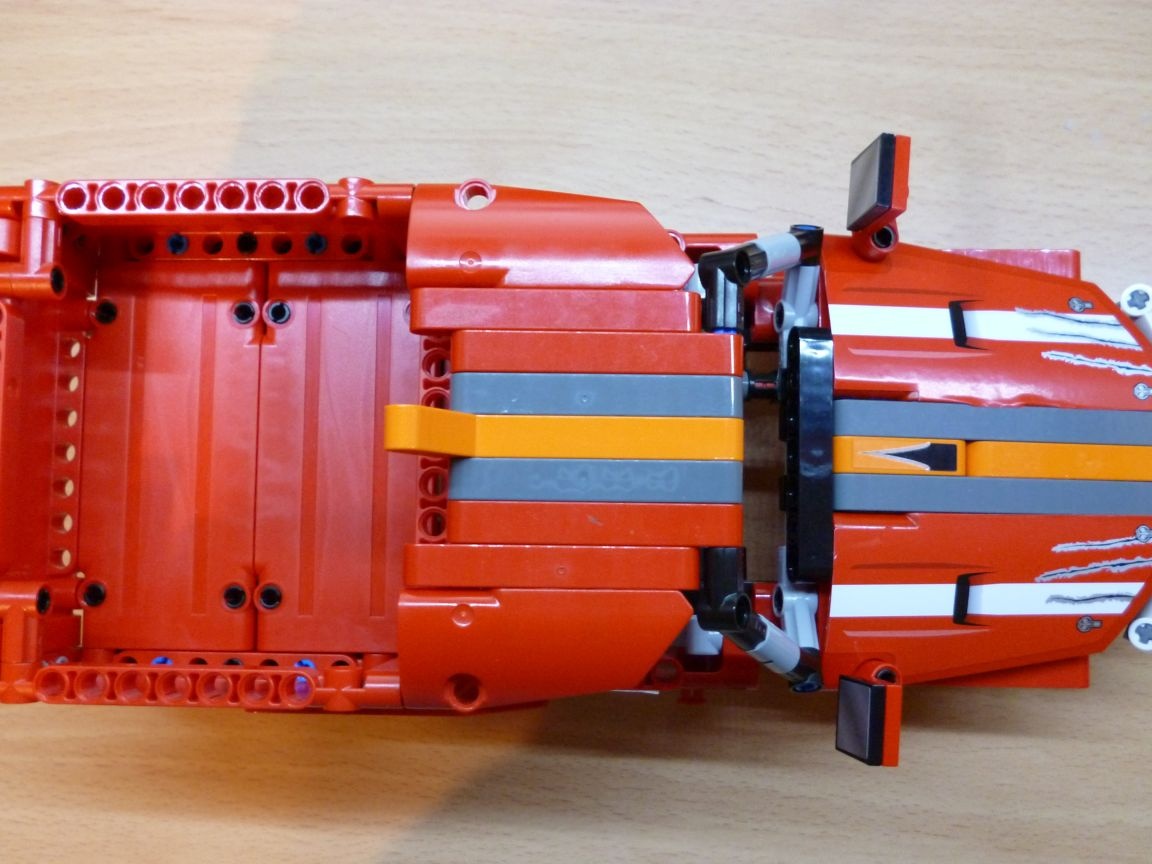
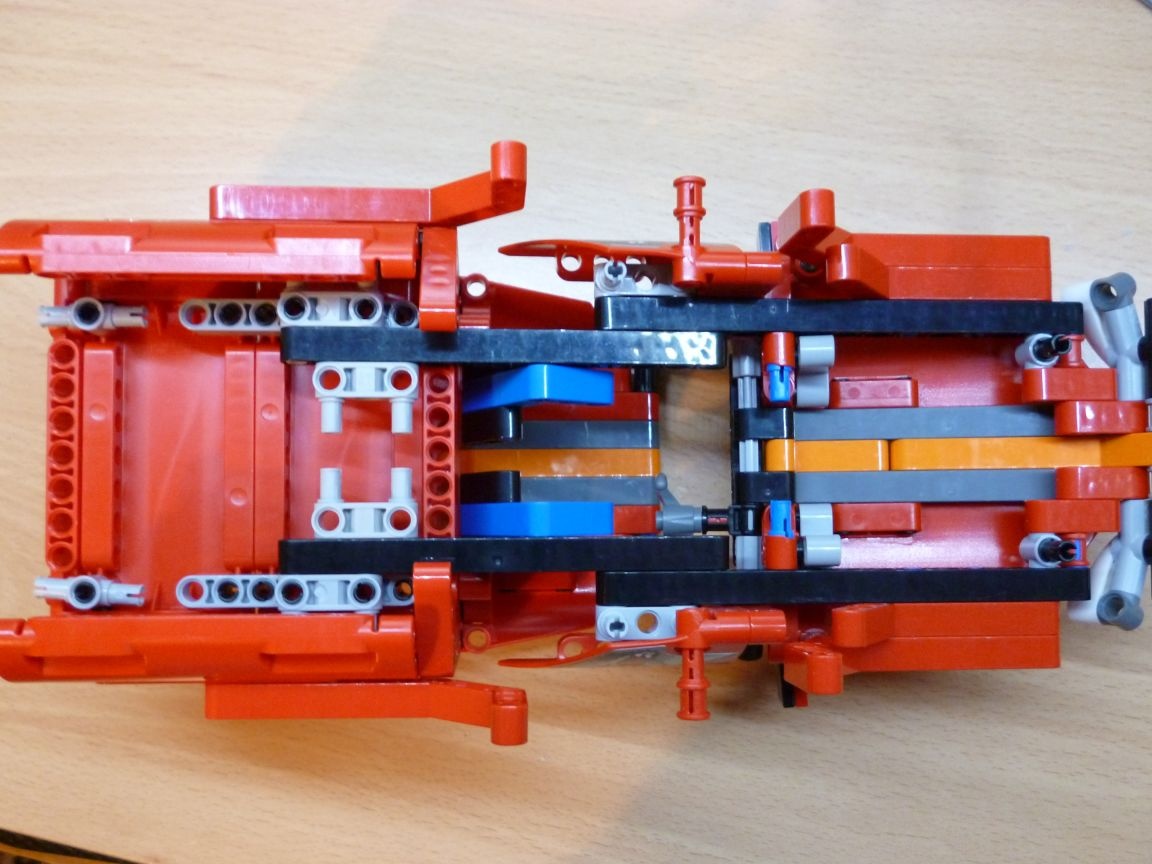
Podeu muntar la vostra pròpia versió, només cal que la pugueu dins del xassís. El més important aquí és fer coincidir el muntatge amb el xassís. N’hi ha quatre i es veuen clarament a la foto de la part inferior de la cabina.
Firmware del pas 6.
Avui, però, com sempre, programa a l’IDE Arduino. Primer heu d'emplenar el firmware i, a través del terminal, mireu els codis de control remot que utilitzeu. Podeu agafar qualsevol comandament a distància IR, per exemple des d’un televisor, reproductor de DVD o muntar el vostre propi (tinc un comandament a distància des del joystick Sega). Al prémer un botó, al terminal veurem el codi del botó prement, escriure'l sobre un tros de paper. Ho fem amb tots els botons en els quals volem programar les accions. A continuació, editeu l'esbós. Anotem els nostres codis per a les accions necessàries i tornem a fer flash. Aquest firmware està configurat al control remot de comandament Sega. En el procés de joc amb la màquina, vaig notar alguns matisos o inconvenients. És difícil aconseguir una recepció fiable de comandes IR durant el moviment. I passa així: premeu la fletxa cap endavant, la màquina va rebre un ordre de marxar i es va precipitar cap endavant, va alliberar la fletxa, però no va rebre un comandament de parada, i continua conduint fins que s’estavelli o s’enganxi, està plena d’avaries. Parcialment, aquest problema es pot solucionar augmentant el nombre de reintents d’enviament d’una ordre, però, això només és possible si s’utilitza el comandament a distància. Però escolliré una solució més cardinal - passaré a utilitzar un receptor de 433MHz - receptor. Escriuré això sobre el següent article.
El pas 7 posa les rodes.
Així doncs, només hem de posar la cabina al xassís, posar-nos les rodes i comprovar en actiu el nostre tot terreny.

