


Així, agafant lego technic del meu fill i a casa Arduino Nano va començar a combinar aquests dissenyadors.
Necessitarem:
- Lego Technic (kits 42029 i 42033)
- Arduino Nano (enllaç a la pissarra)
- DRV 8833
- 2 servomotors SG-90
- Receptor IR
- motor d’engranatges
- 2 LEDs
- 2 resistències 150 ohms
- Capacitor 10v 1000uF
- 2 pintes d'una sola fila PLS-40
- 2 connectors PBS-20
- Inductor de 68mkGn
- 4 piles NI-Mn 1.2v 1000mA
- Connector pare-mare de dos pins a cable
- Homutik
- Cables de diferents colors
- soldadura
- Rosí
- soldadura
- Bolts 3x40 i femelles i rentadores per a ells
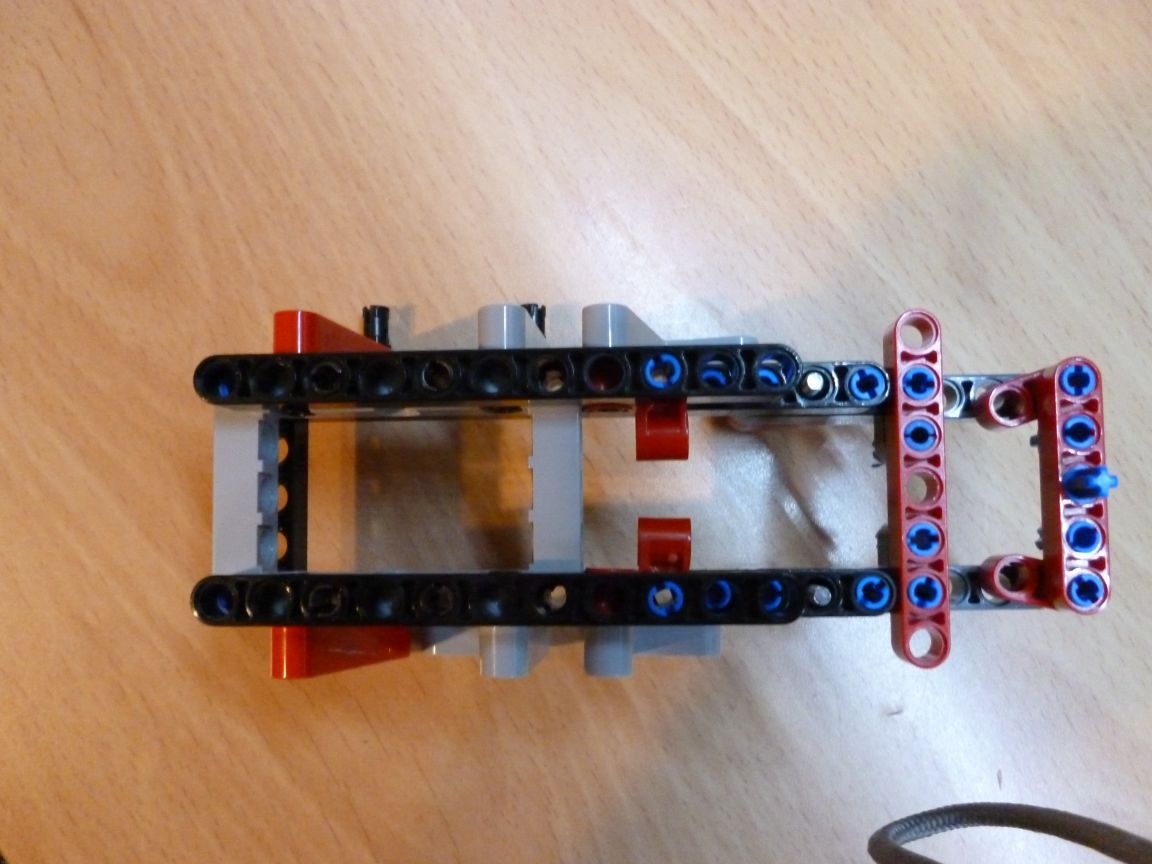
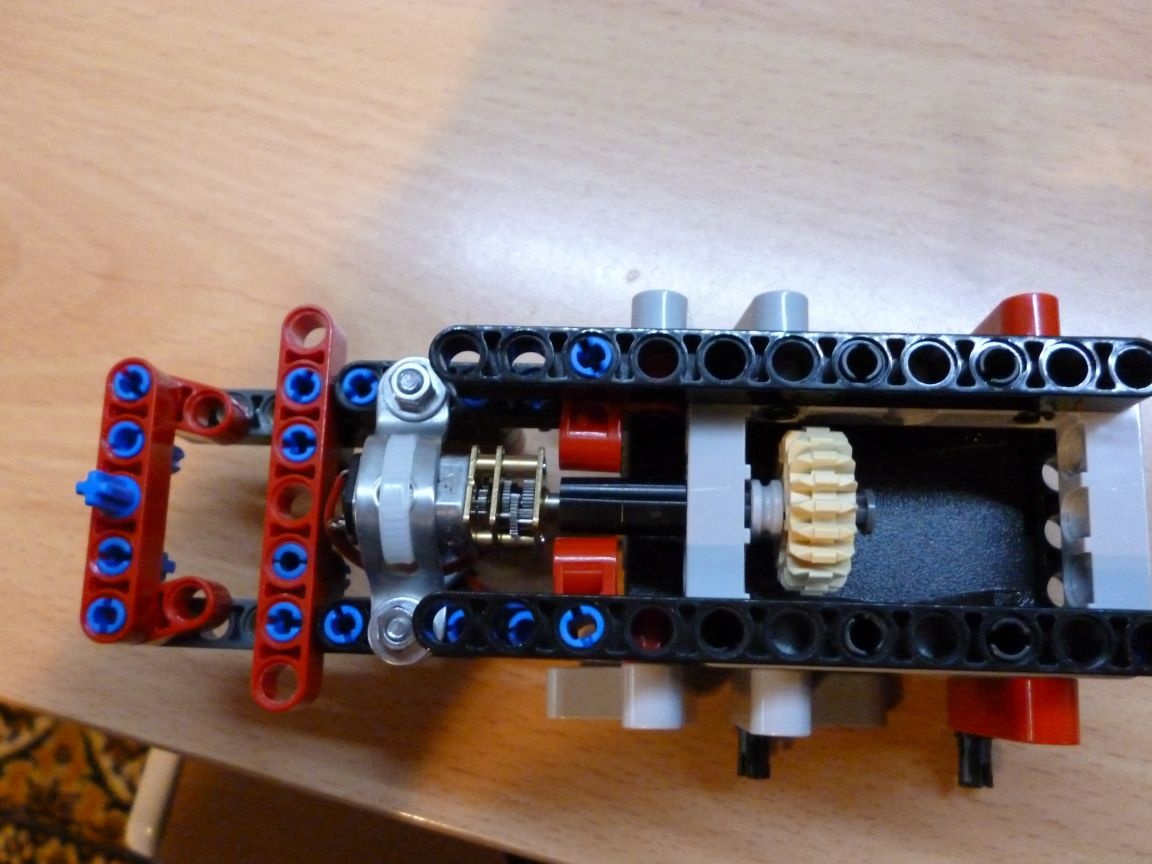
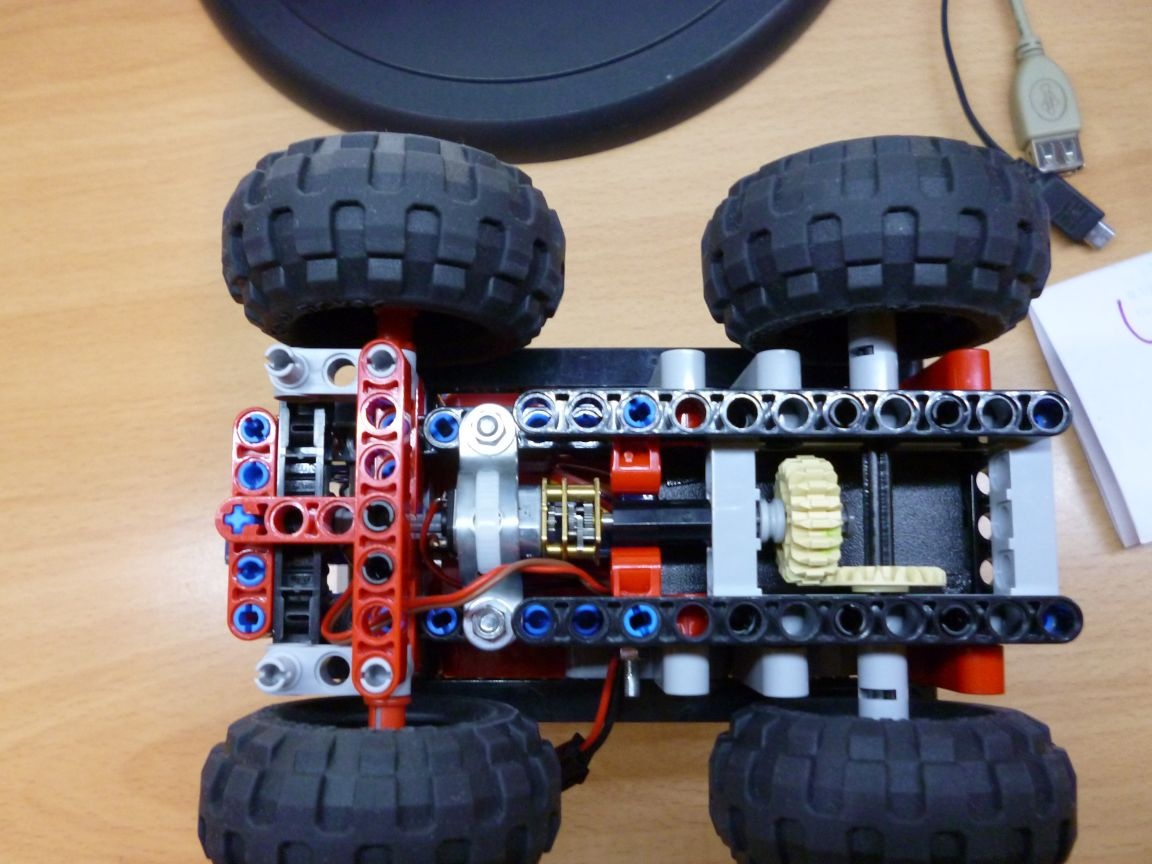
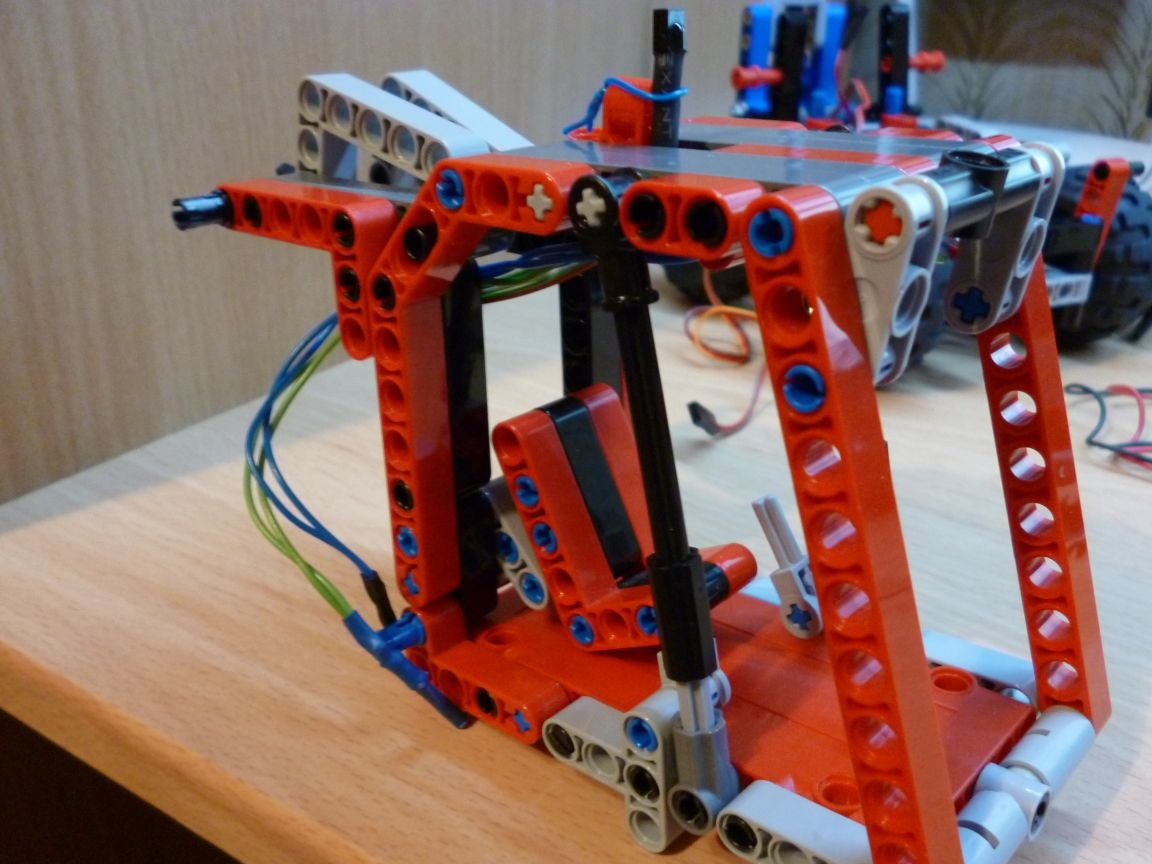
Al primer pas muntem el xassís i l'eix de tracció.
Podeu muntar qualsevol xassís de Technic, de totes maneres, ha resultat així.
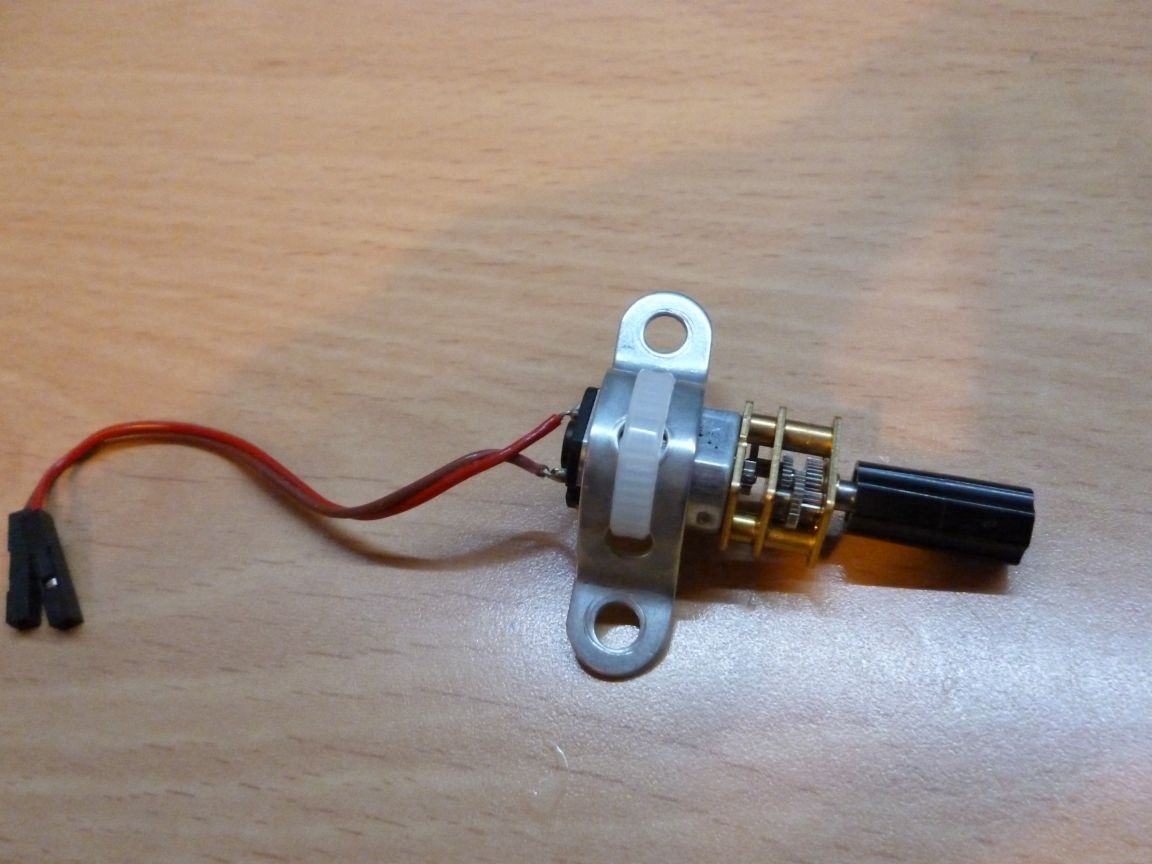
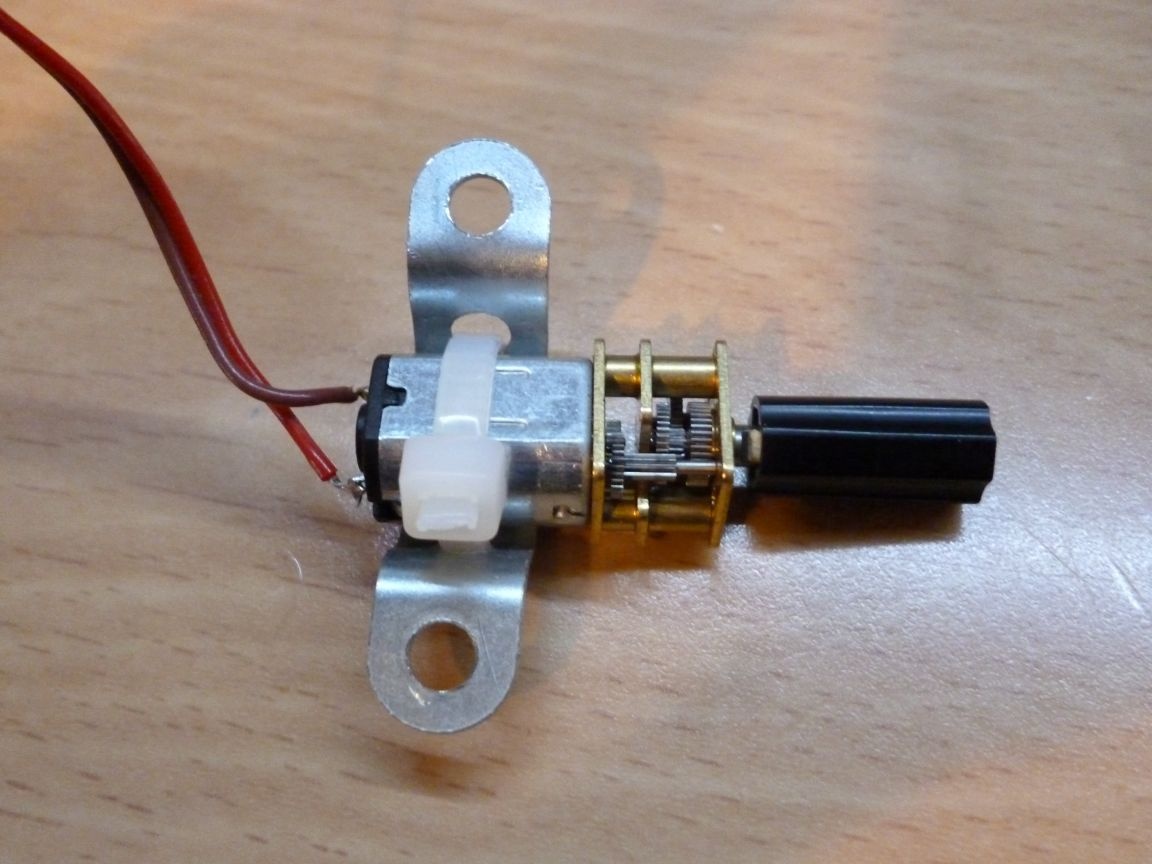
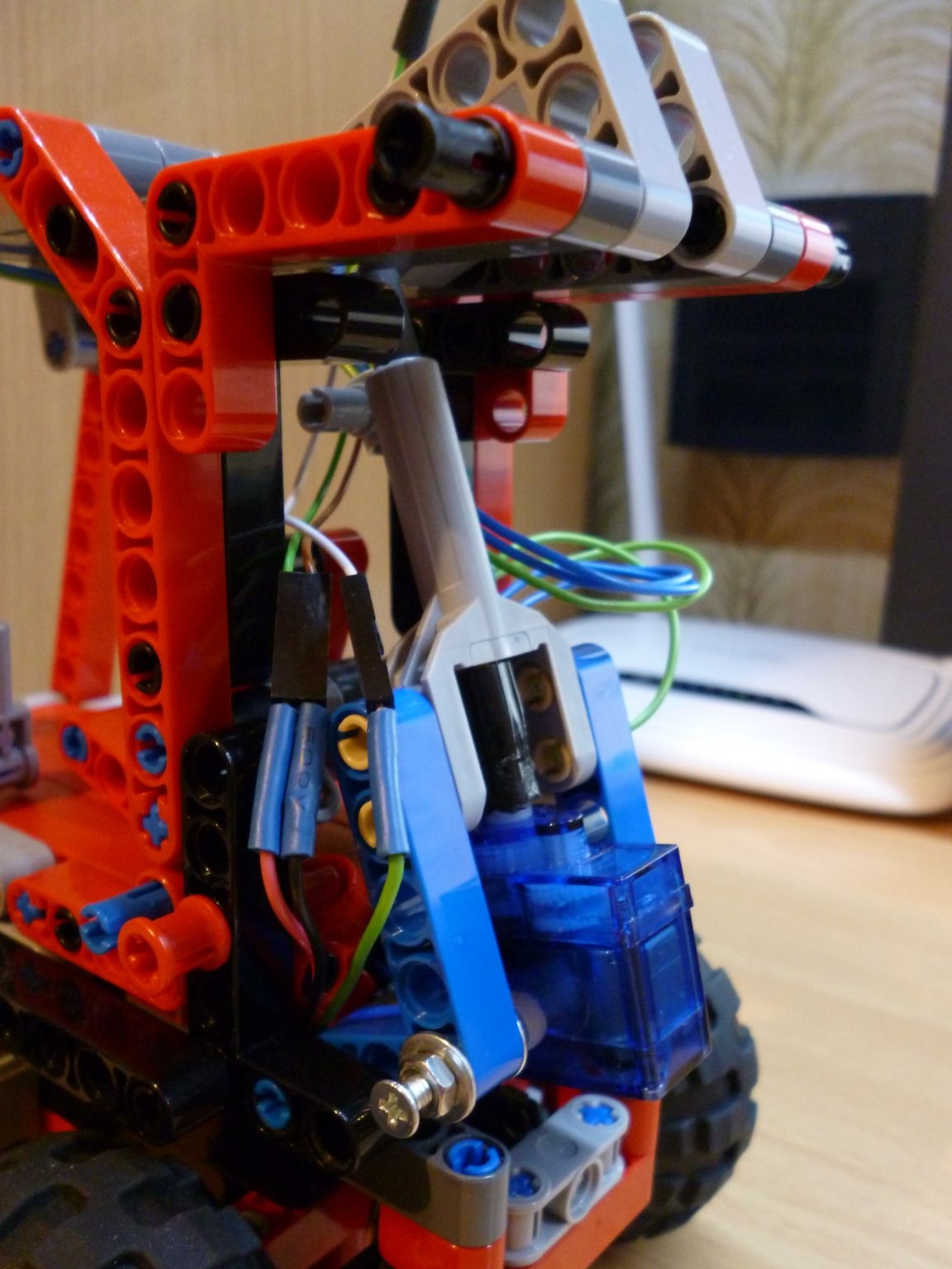
Només hi ha el problema de connectar el motor d’engranatges amb les peces del dissenyador. Vaig decidir-ho de la manera següent: posar a l’eix del motor d’engranatges una funda de connexió i he inserit una ferralla d’un llumí per a la seva fixació. Per al muntatge del motor d’engranatges s’utilitza plàstic metàl·lic d’un dissenyador de ferro i una abraçadora. Va resultar el següent:
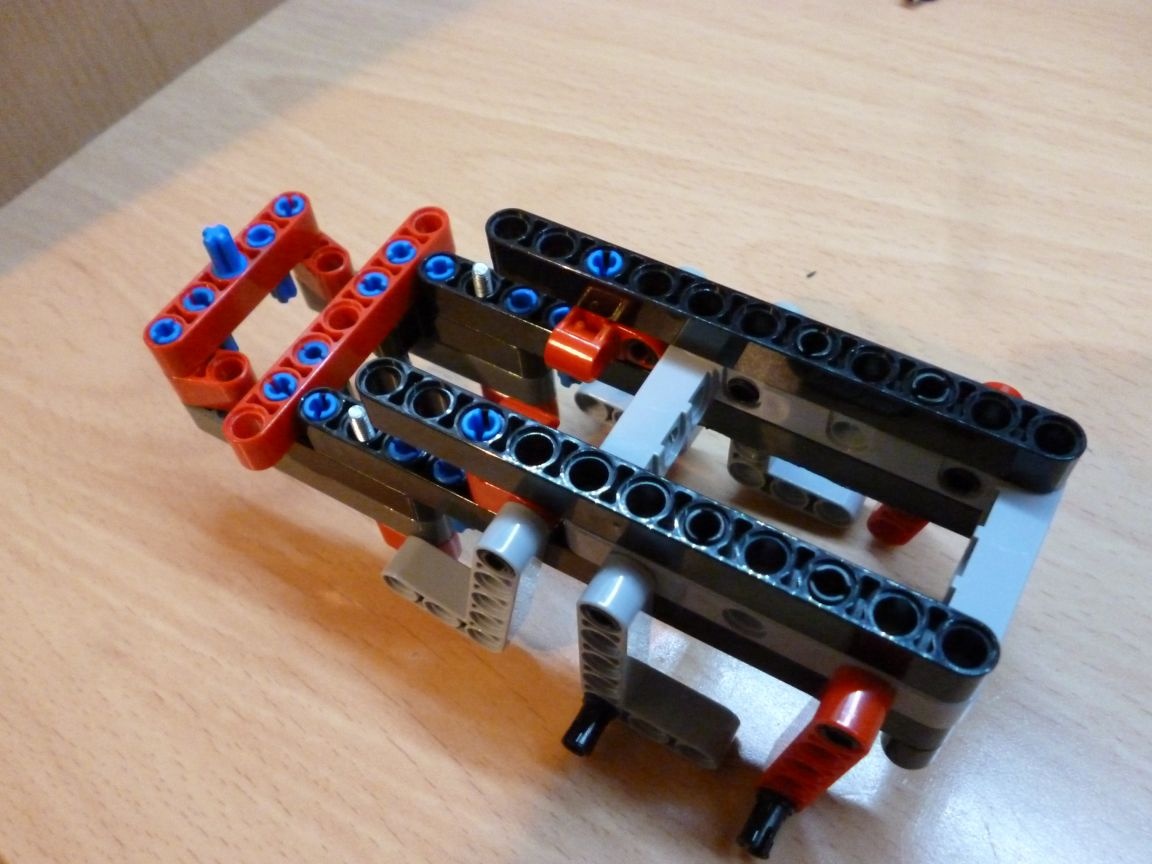
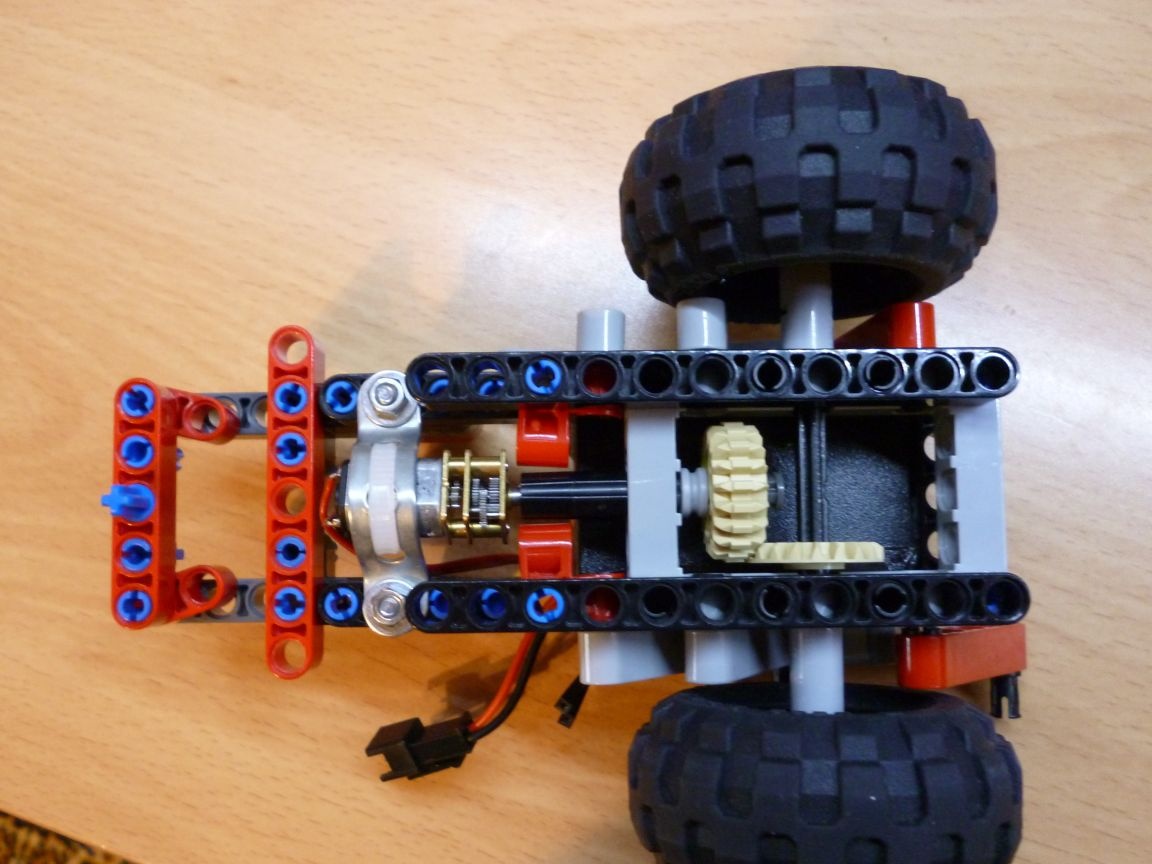
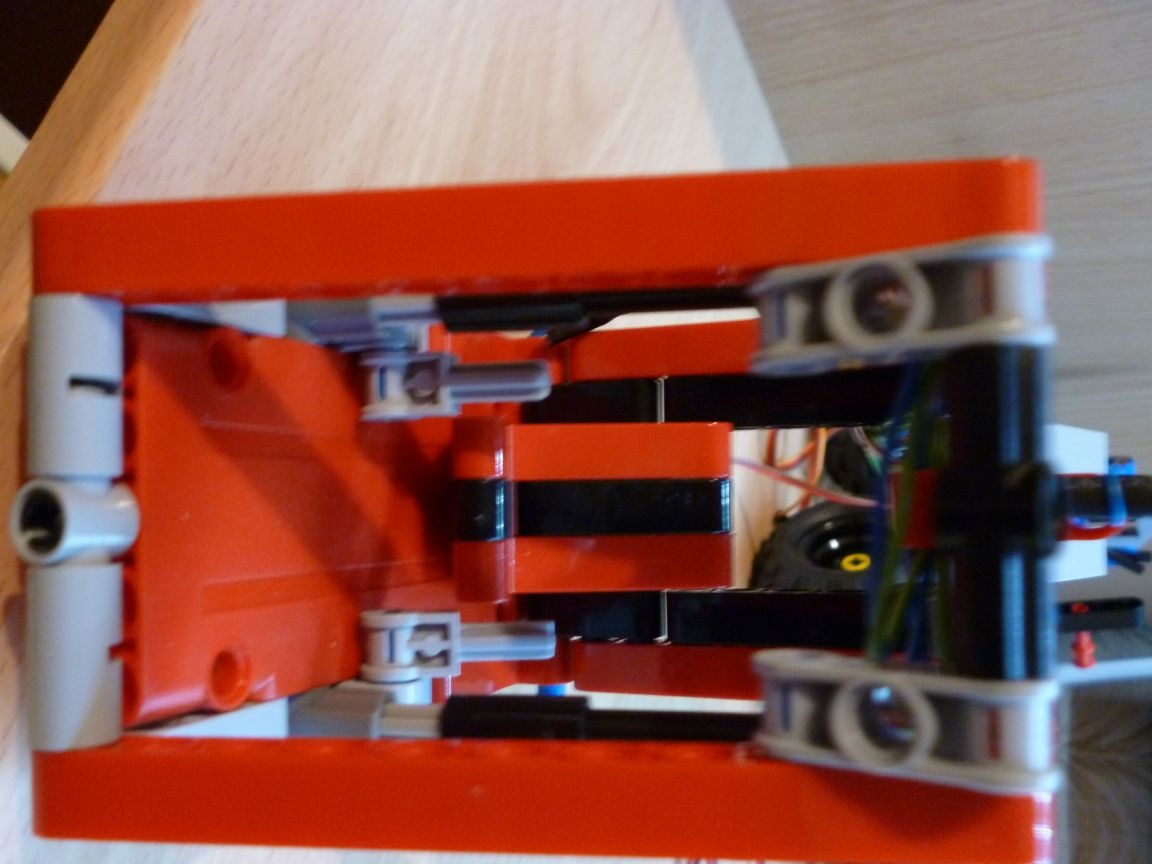
A continuació, instal·lem el disseny resultant en el xassís mitjançant cargols de 3x40:
I poseu-vos les rodes:
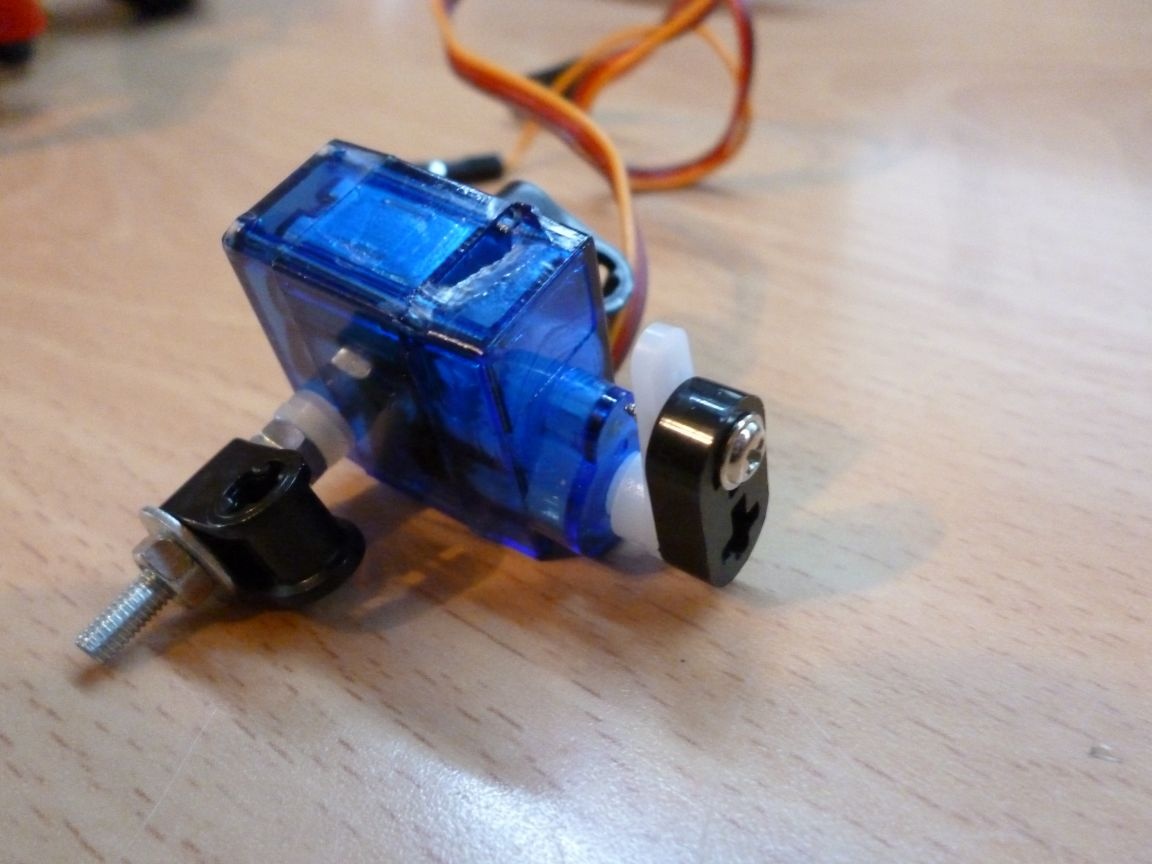
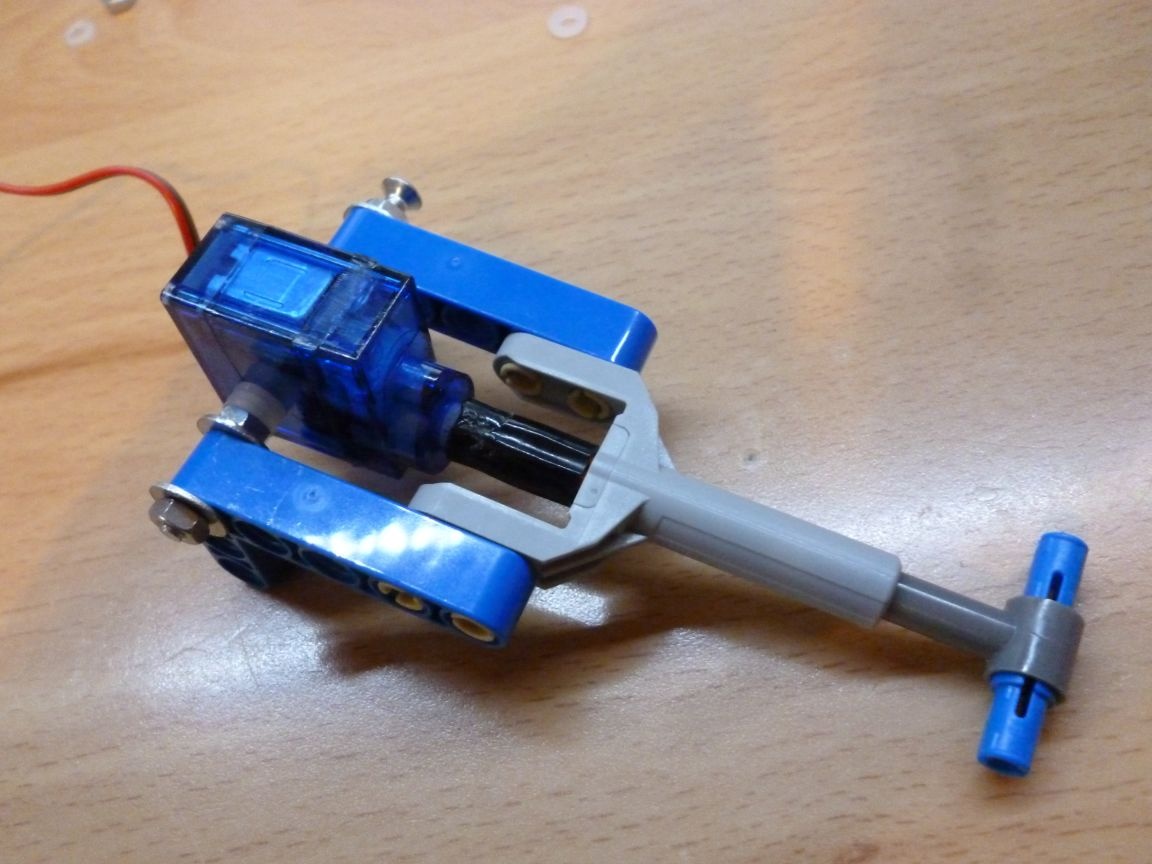
Pas 2 rodes giratòries
Per dur a terme la rotació es va prendre el servo SG-90. Cal perforar amb cura, per no tocar les parts internes, un forat de pas amb un diàmetre de 3,2 mm o simplement tallar-lo amb un ganivet de papereria.

Inserim un forrellat al forat fet i les cantonades al llarg de les vores i les fixem amb femelles:

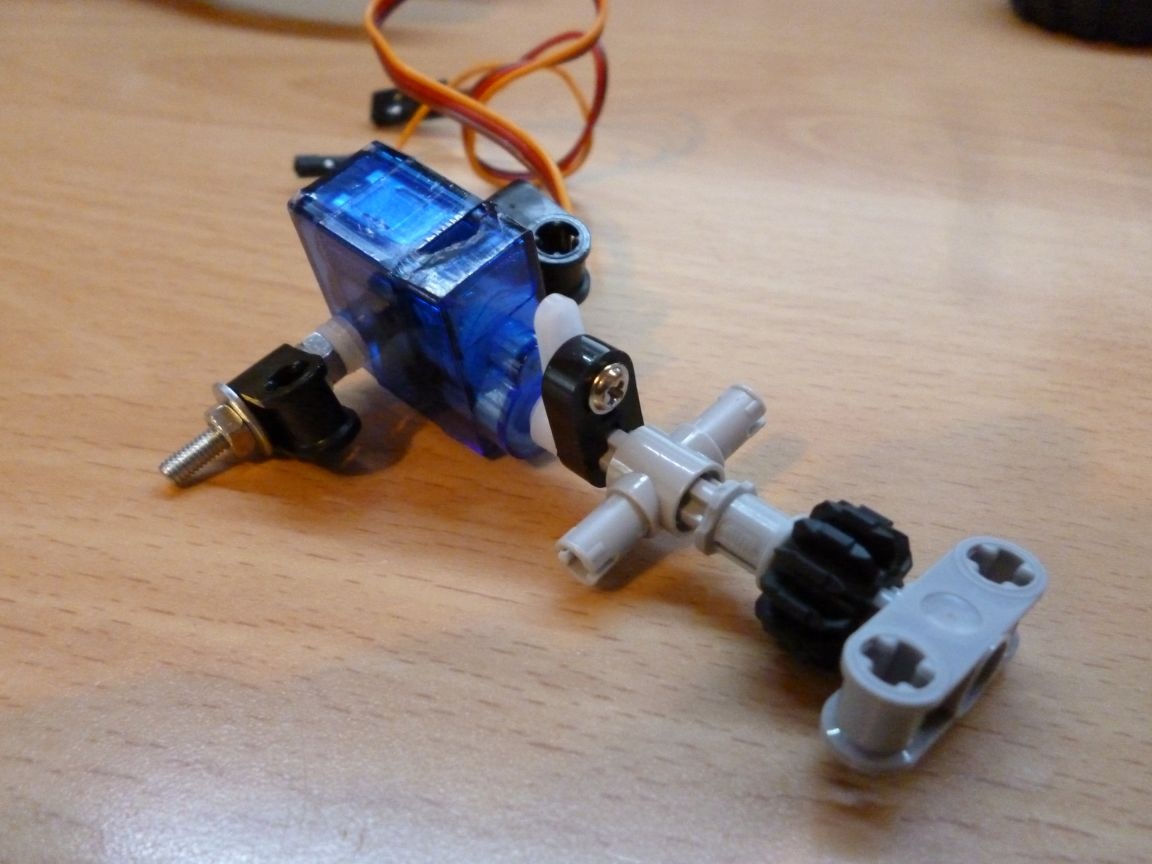
A l’eix servo posem una palanca amb una part cargolada de lego:
I finalment el muntatge giratori:
Posem el xassís:

Poseu-vos les rodes:
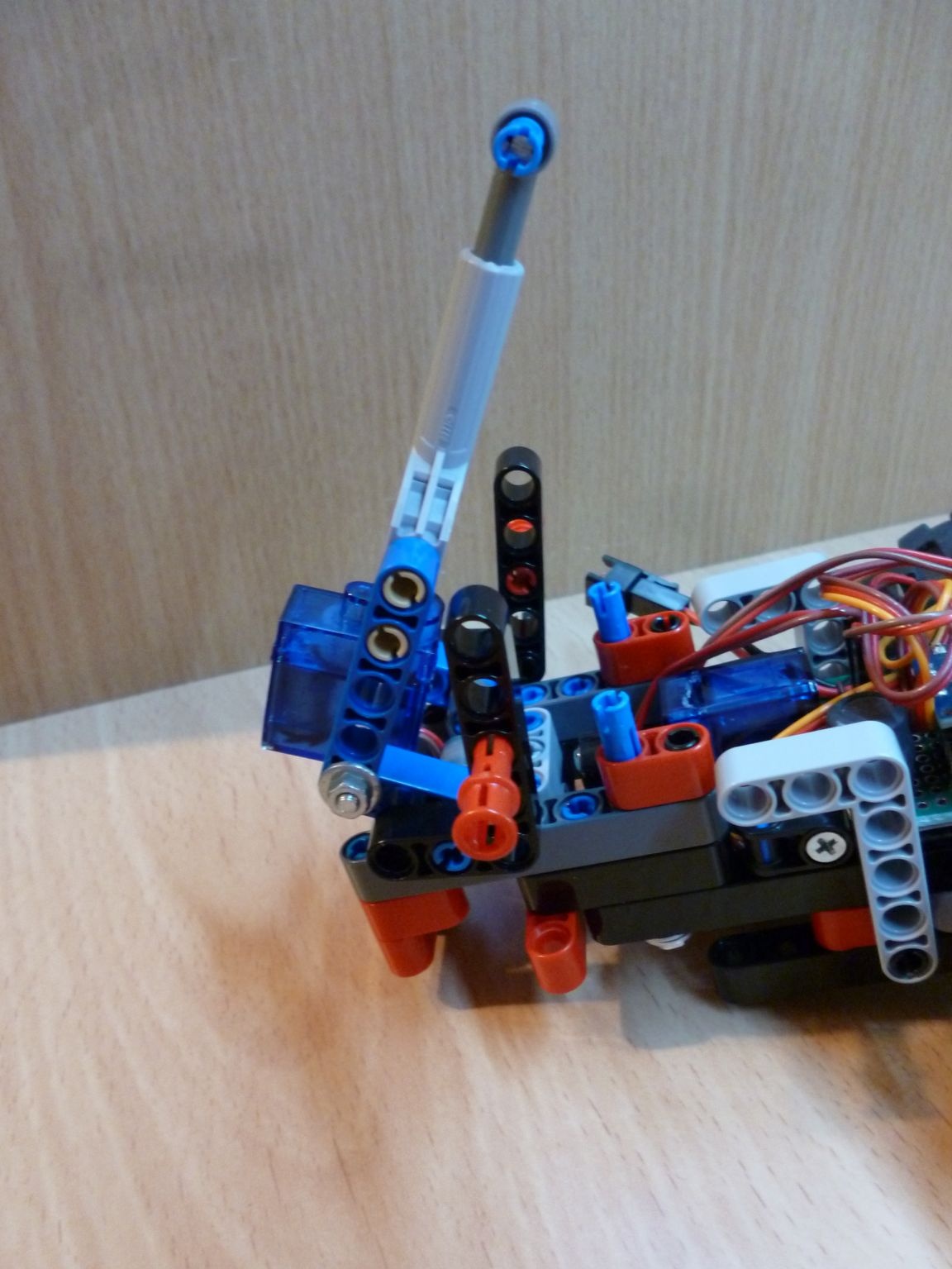
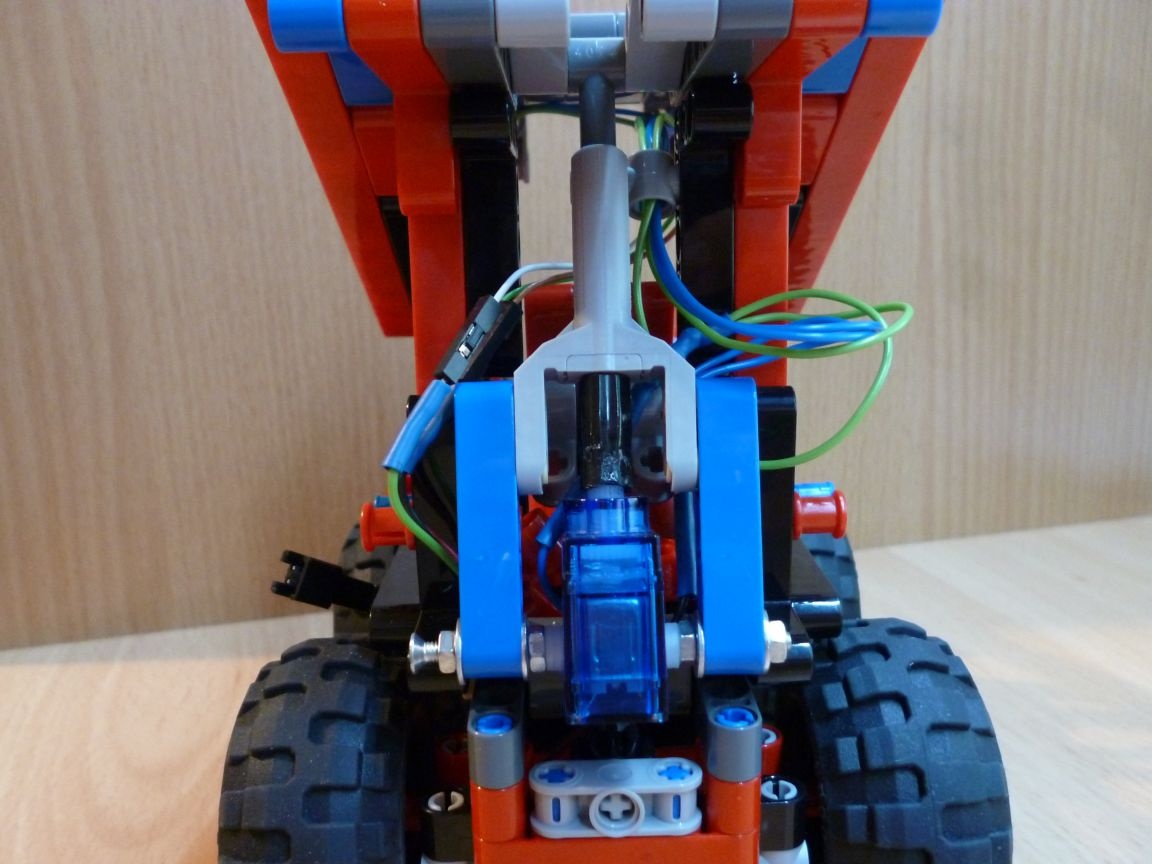
Pas d'elevació del pas 3
Per aixecar la galleda es va necessitar un servo modificat SG-90. La totalitat de la seva modificació és treure el controlador intern i soldar els cables directament al motor per tal que un motor d’engranatges surti del servoaccionament, és a dir, que pugui girar completament. Així com en el primer servo, heu de fer un forat de pas per muntar:
Instal·leu en el xassís:
Pas 4 cabina.
Cal muntar una cabina de lego technic a partir de fotografies:

El pas 5 és electricista.
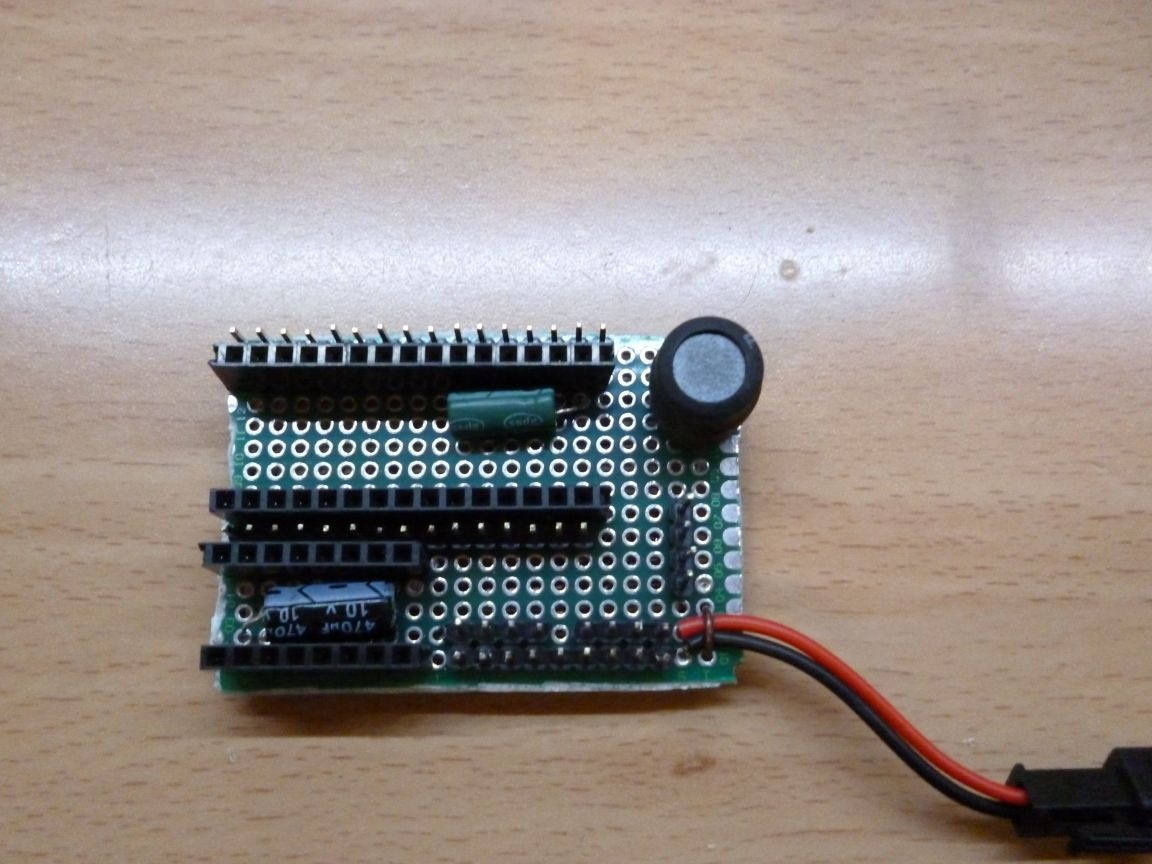
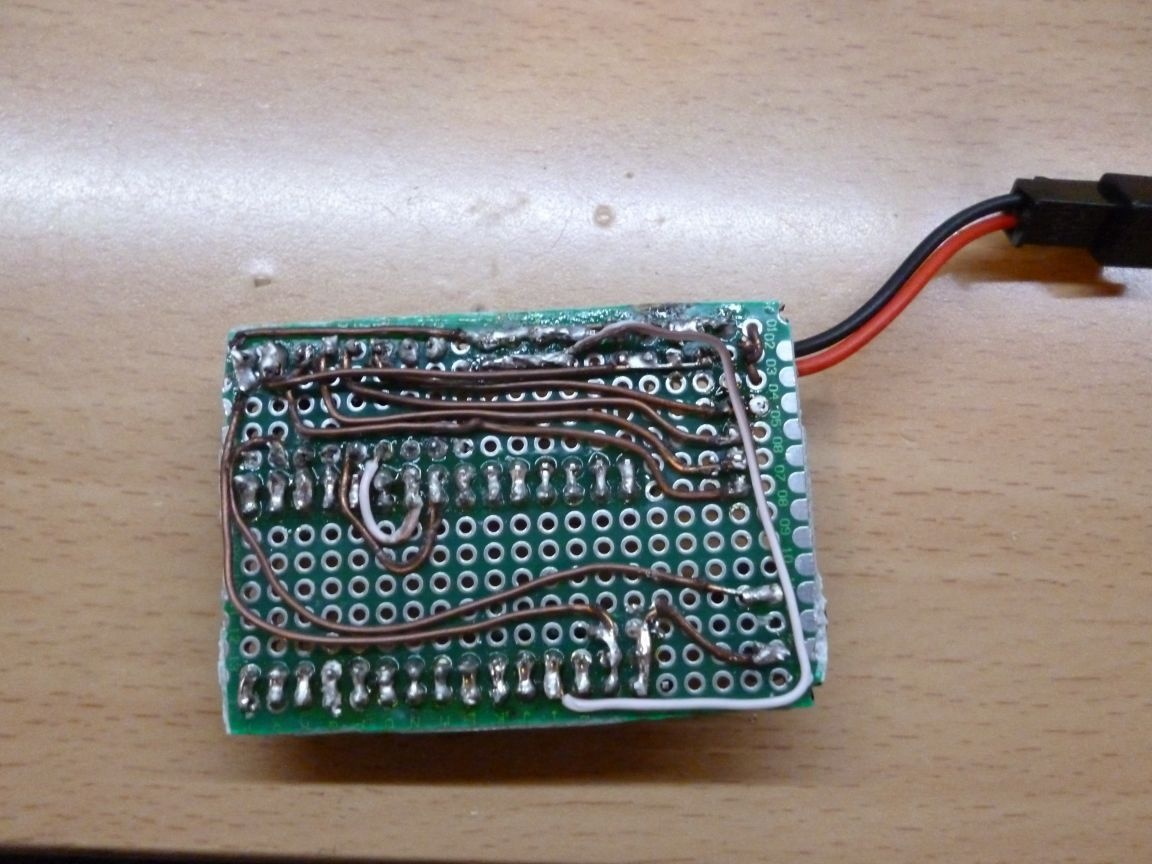
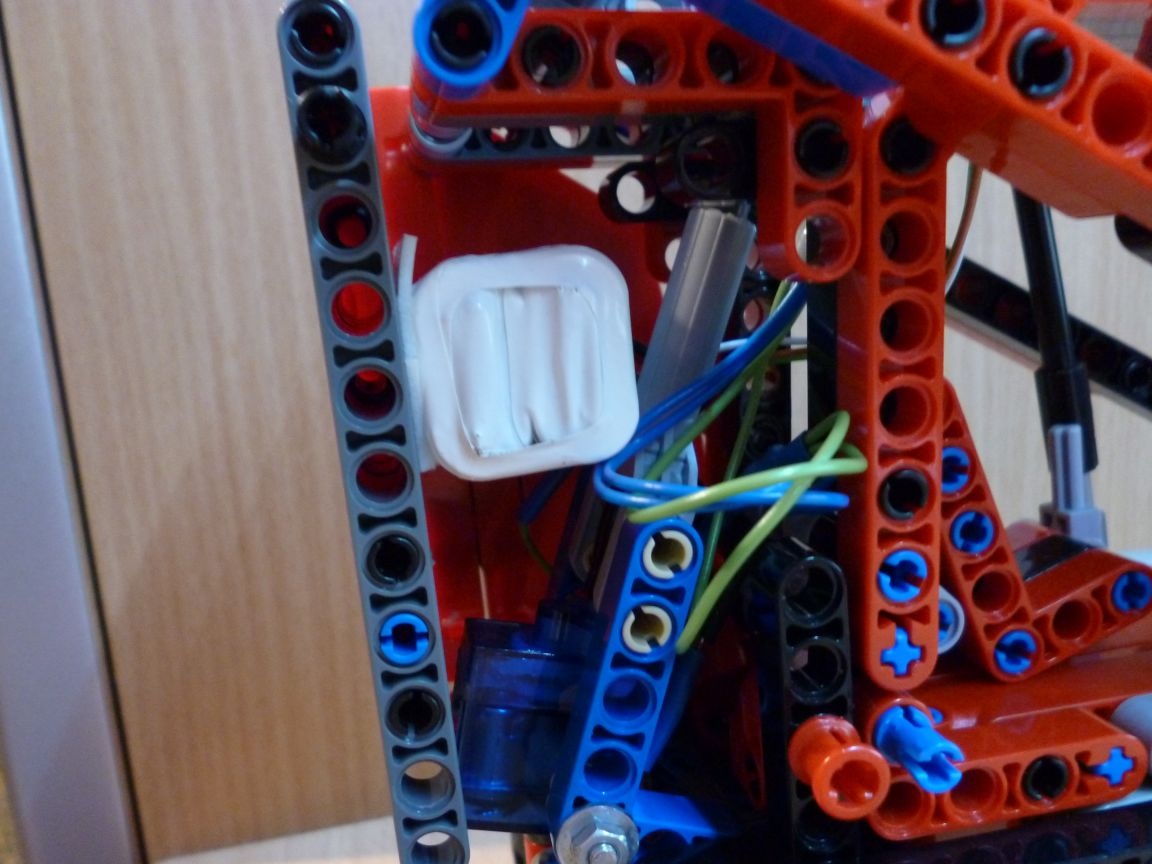
Aquí heu d’agafar una soldadura. Per obtenir comoditat, heu de vendre tot a la placa de circuit segons el següent diagrama:
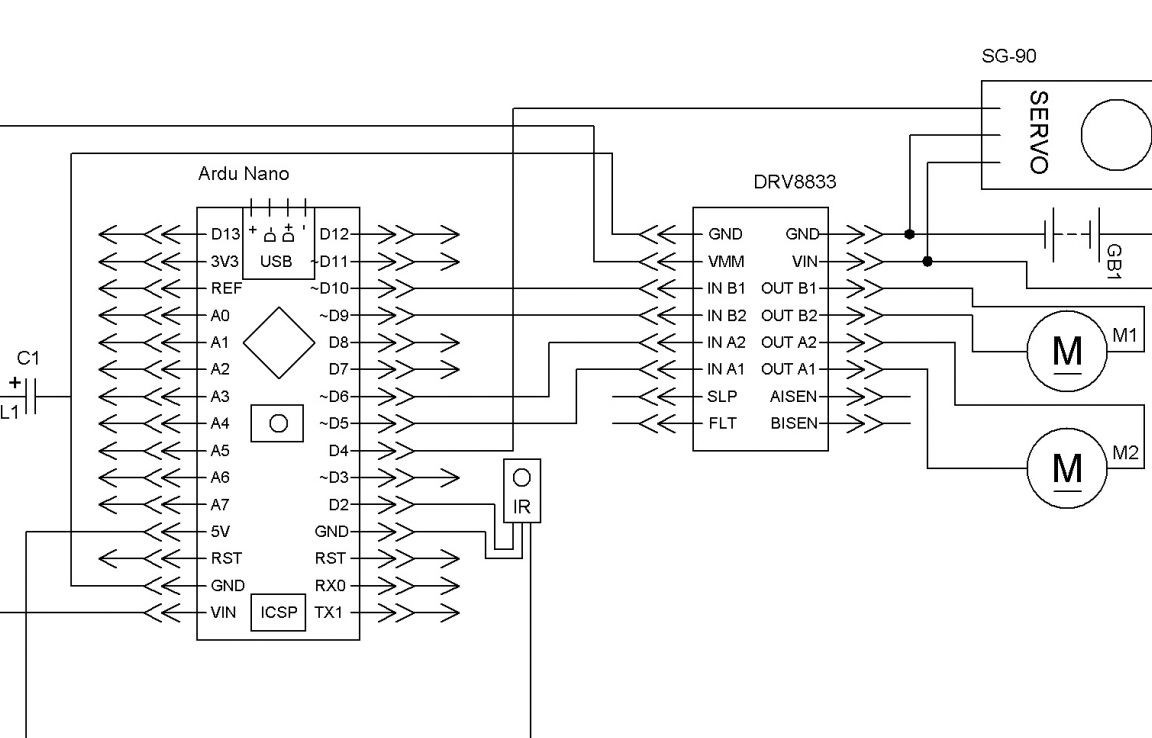
Crec que val la pena explicar-ho una mica: pots agafar qualsevol condensador de poca potència, també pots trobar un inductor de qualsevol tipus, això és necessari per estabilitzar la tensió del microcontrolador. Cal seleccionar resistències per als LED utilitzats. Vaig agafar un receptor d’IR d’una joguina antiga, però el podeu comprar a una botiga de ràdio. Si hi ha interferències fortes, afegiu un condensador al circuit d’alimentació del receptor IR.
Ho tinc:
Instal·lem Arduino Nano i DRV 8833 als seus llocs:
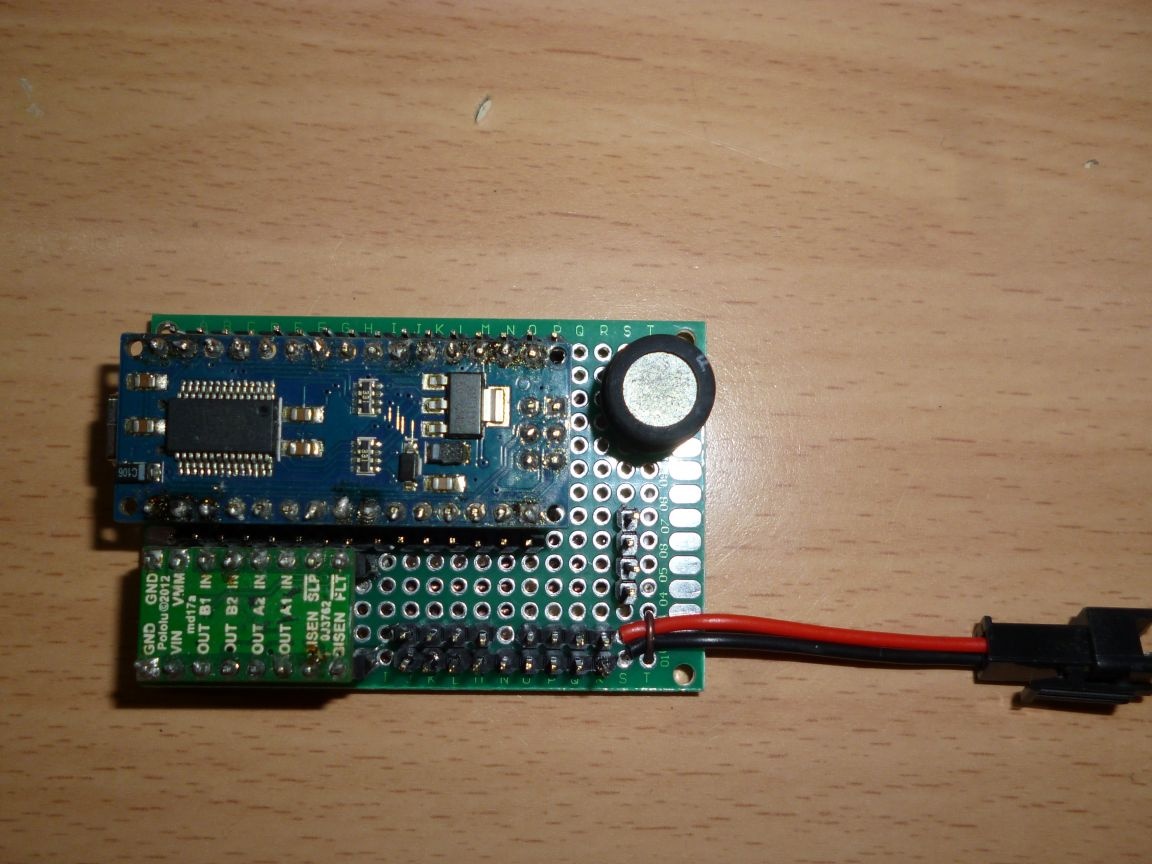
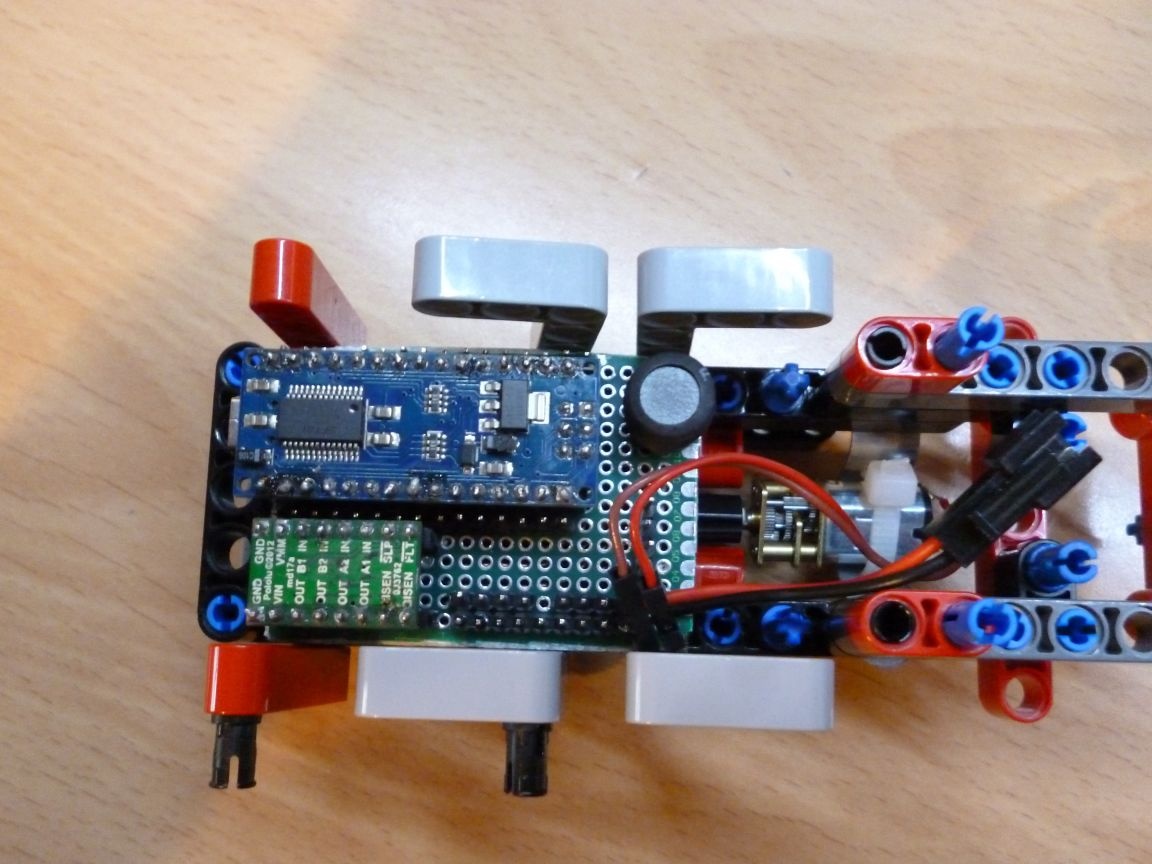
I ara posem el tauler al xassís (hem tret les rodes per comoditat):
Per energia, he utilitzat 4 piles Ni-Mn 1.2v 1000mA connectades en sèrie i enrotllades amb cinta elèctrica. Els vaig enganxar a cinta de doble cara sota la tapa de la cabina posterior.
Instal·lació de la cabina pas 6
Connectem el receptor IR, motors i díodes segons el diagrama, posem la cabina a sobre del xassís, fixem la cubeta (es pot fer qualsevol cub):

Firmware del pas 7
Estic programant en un IDE d'Arduino. Primer heu d'emplenar el firmware i, a través del terminal, mireu els codis de control remot que utilitzeu. Podeu prendre qualsevol control remot IR, per exemple, des d'un televisor o reproductor de DVD. Fent clic en un botó del terminal veurem el codi del botó prement, anotarem-lo en un tros de paper. Ho fem amb tots els botons sobre els quals volem programar les accions del carregador. A continuació, editeu l'esbós. Anotem els codis que vam registrar per a les accions necessàries i ho tornem a fer flash.
Firmware
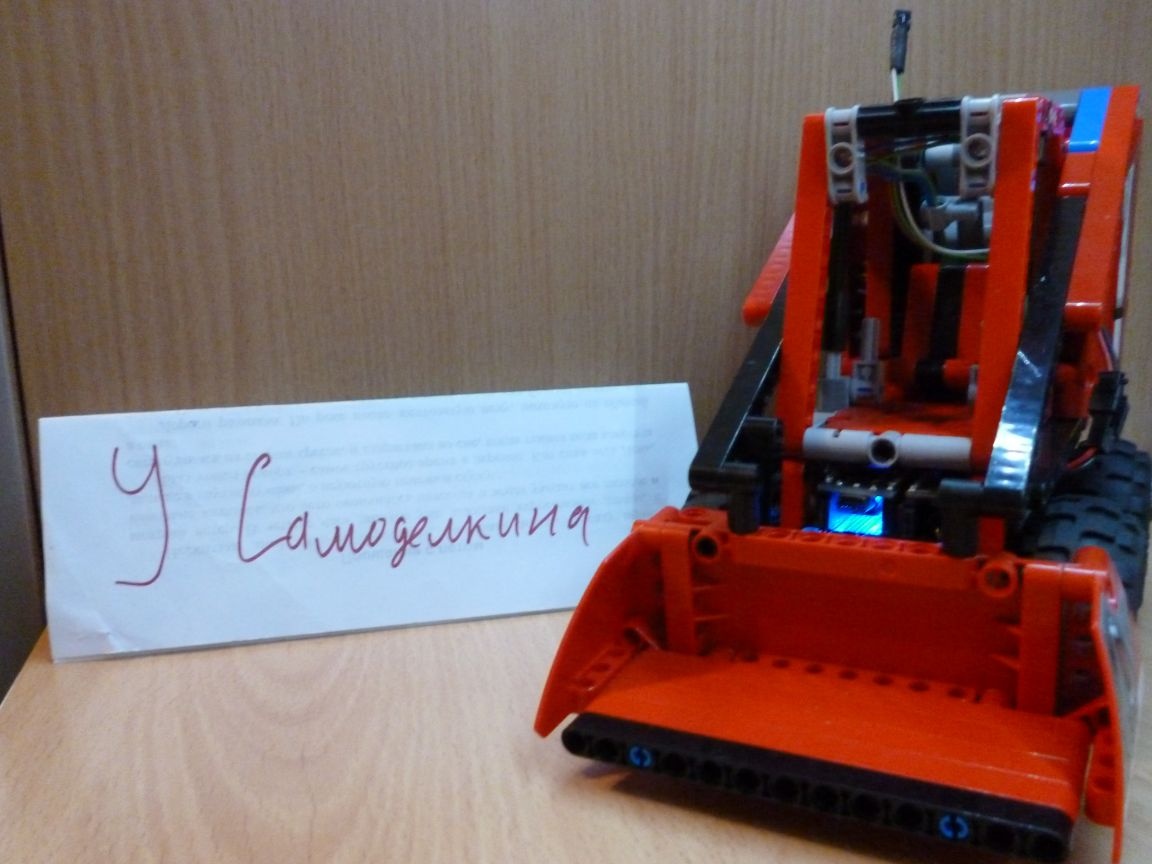
Carregador de vídeo: