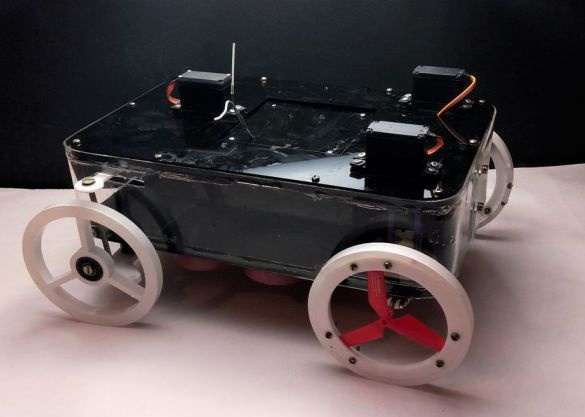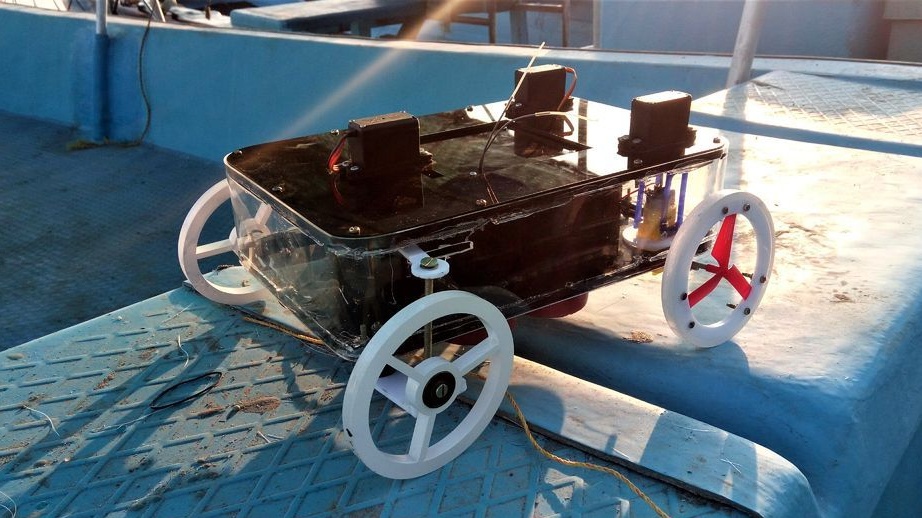



En aquest article, considerarem la fabricació per part d’artesans indis d’un vehicle tot terreny que es desplaça tant per terra com per aigua. Vehicle tot terreny consta d’una plataforma flotant amb rodes i una hèlix. Els mecanismes es controlen mitjançant control remot mitjançant Arduino UNO.
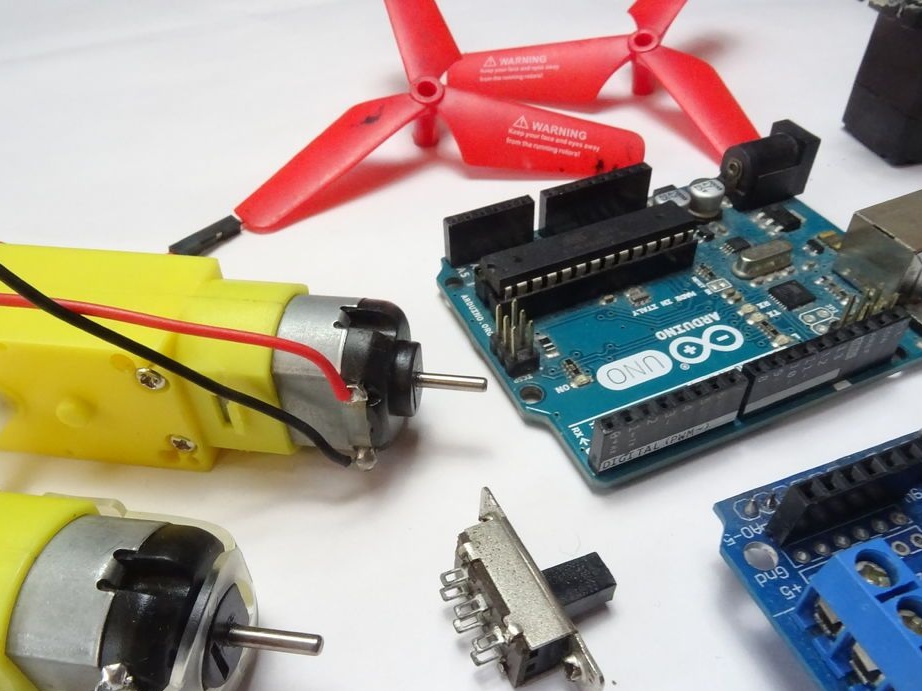
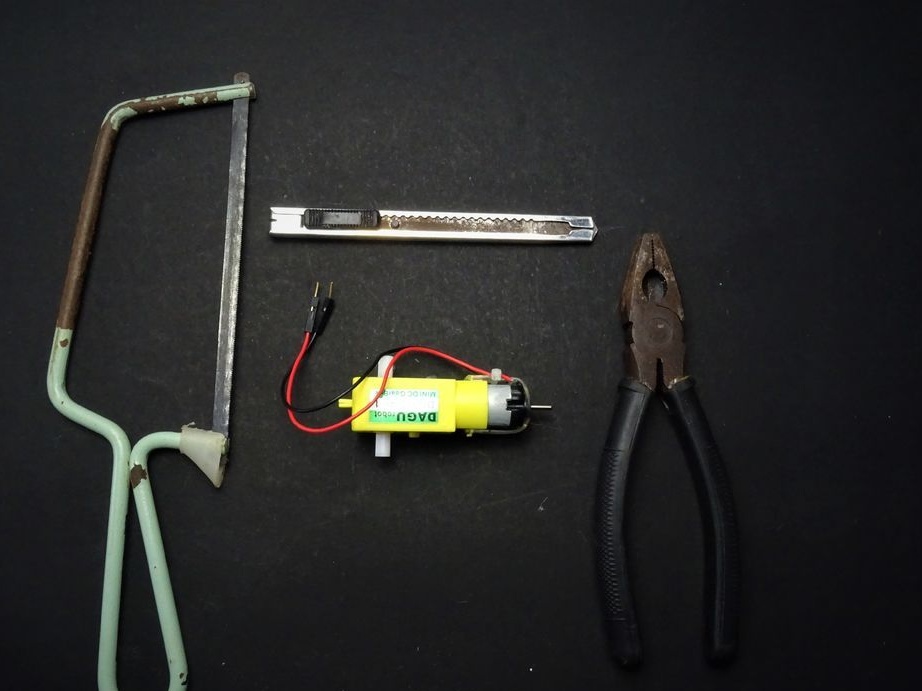
Eines i materials:
-
-AKB 9V;
-Ambuta;
-Acryl;
-Placat;
(per referència, el coixinet és de 8 x 16 x 5 mm, l’autor indica 8 * 22 mm)
-Dues hélices;
-Atxulladors;
-Fulls;
-Pistola de vidre;
-Super cola;
Resina epoxi;
-Soldador de ferro;
-Drill;
-Talla talladora;
-Serra;
- tornavís;
-Drill;
-Soldador de ferro;
-Board;
-Informàtica amb programari;


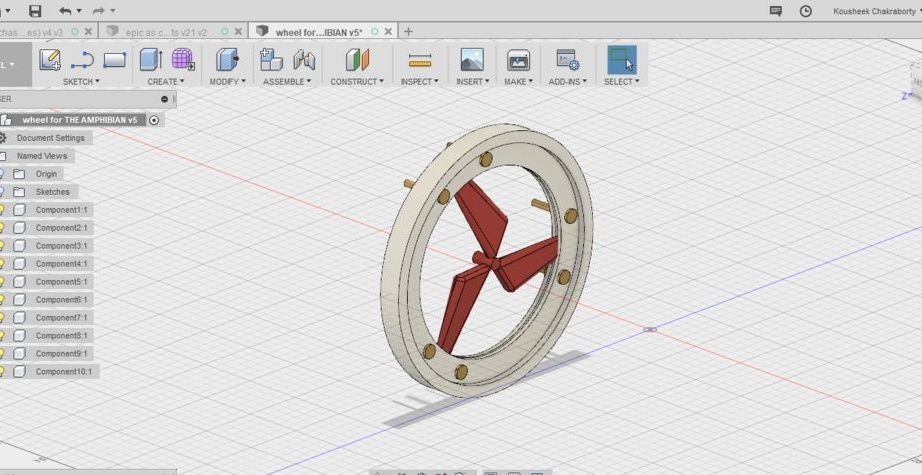
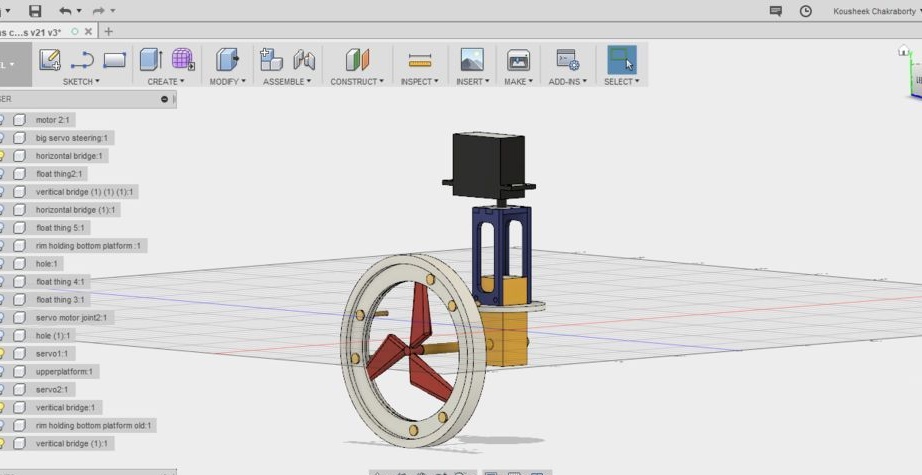
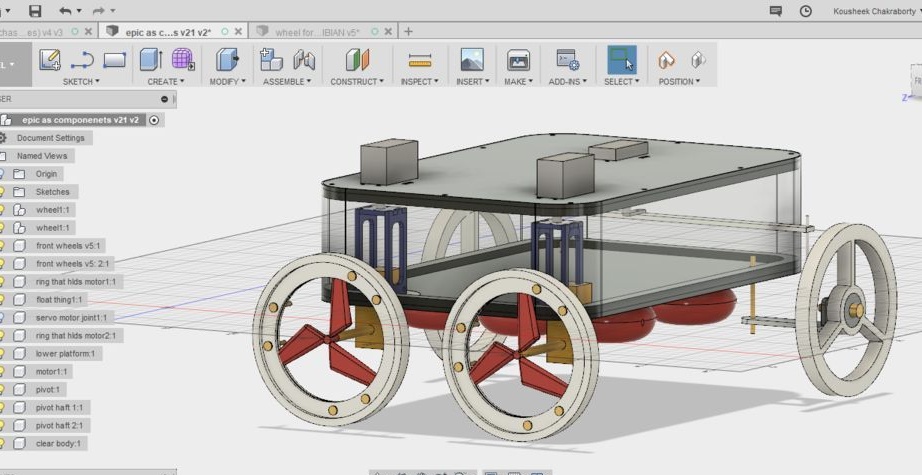
Primer pas: Disseny
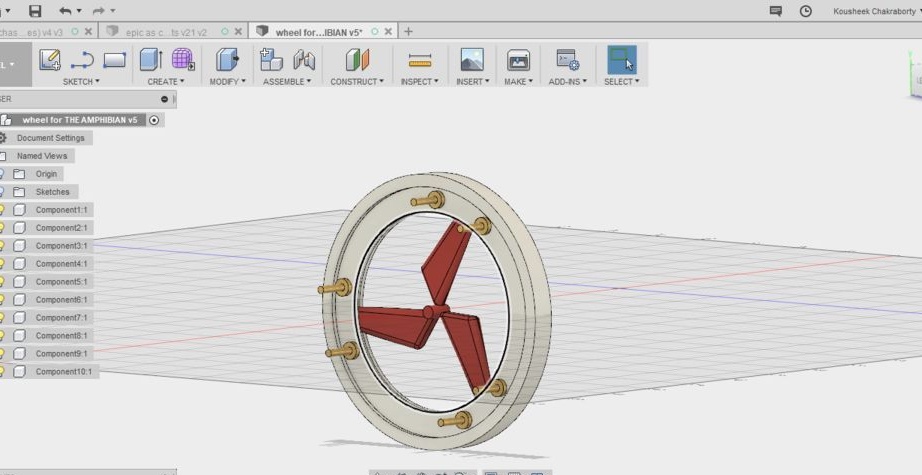
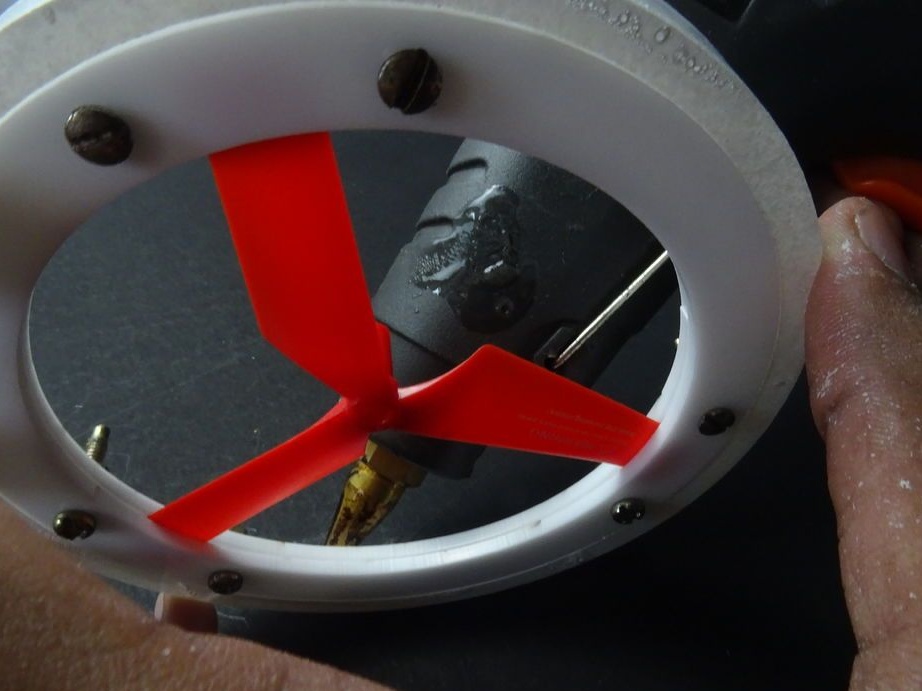
Per crear el projecte, els mestres van utilitzar el programa Fusion 360. Totes les dificultats consistien en combinar el moviment a terra i aigua. A l’hora de dissenyar les rodes, els amos van desenvolupar un sistema en què els cargols s’obrien a l’aigua, però en vista de la complexitat del disseny, simplement integraven les hèlixs de la joguina dels nens dins de la roda. Això permet a les rodes moure el vehicle tot terreny per terra i, quan entren a l’aigua, els cargols s’encenen.
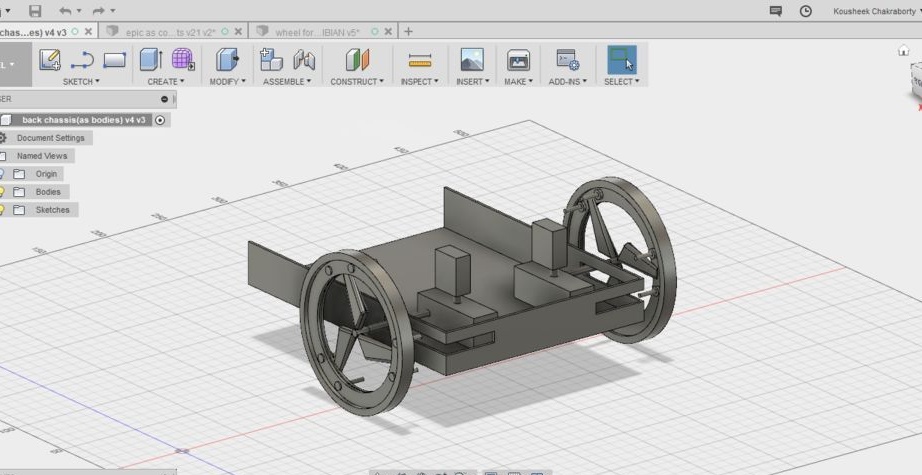
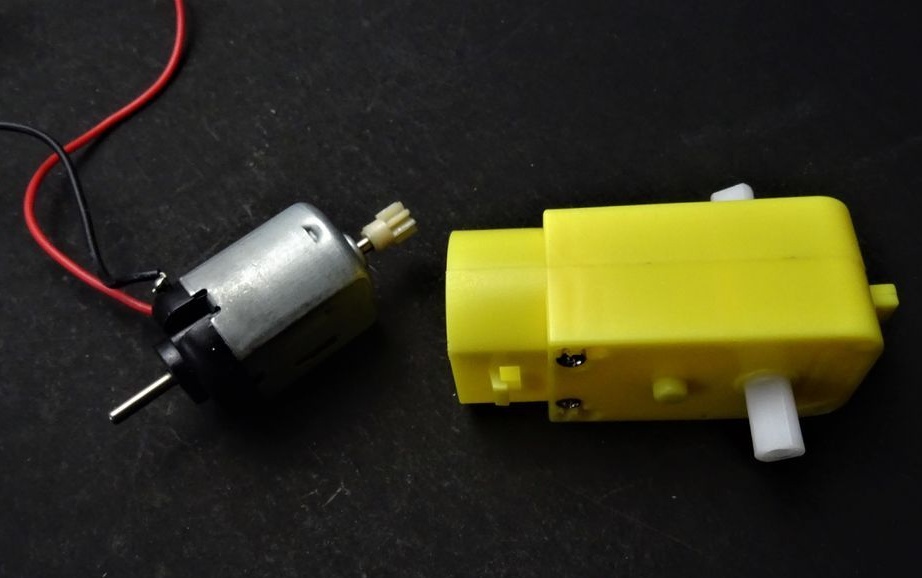
Per aplicar aquesta idea, heu de poder girar les rodes posteriors perpendiculars al vehicle tot terreny en conduir amb aigua. Això va ser possible quan els engranatges del motor es van treure del bastidor. Les caixes de canvi de plàstic i l'aigua que els entra no perjudicaran.
La rotació dels cargols de les rodes es realitzarà mitjançant un servomotor.
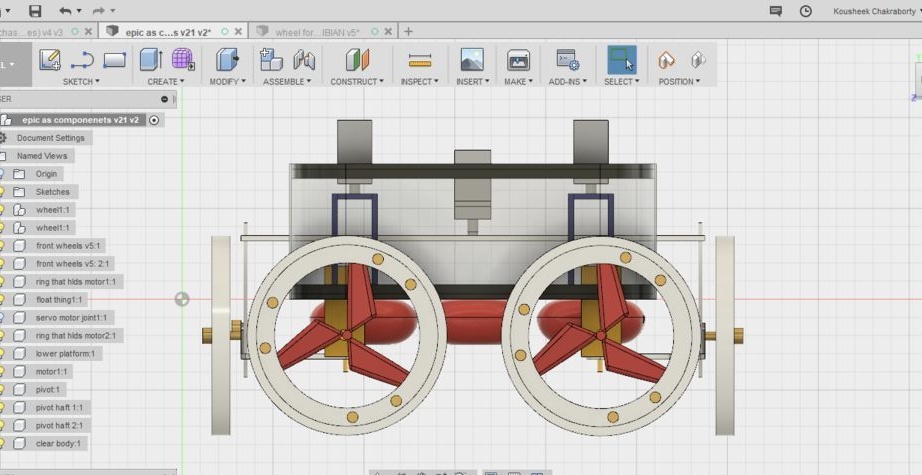
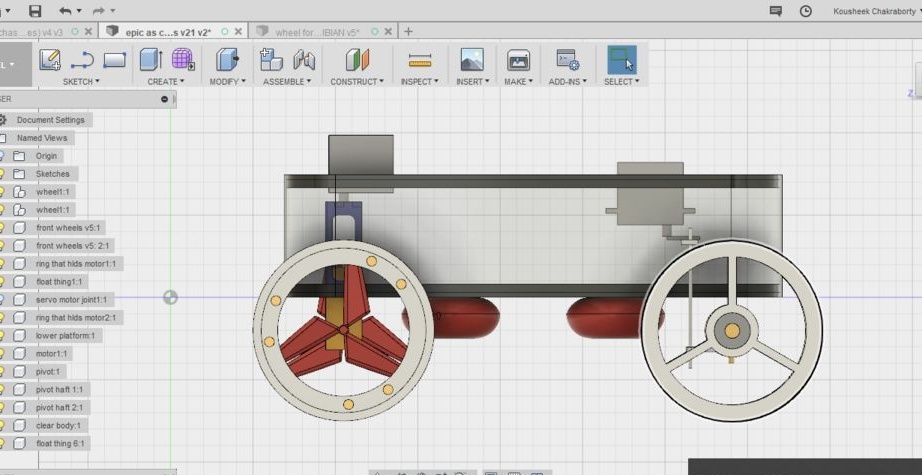
El vehicle tot terreny té dos mecanismes de tornejat. Una per controlar les rodes posteriors de les hélices a l’aigua, i la segona, per conduir a terra, controla les rodes davanteres. L’angle de gir de les rodes davanteres és de 35 graus, cosa que permet fer voltes brusques.
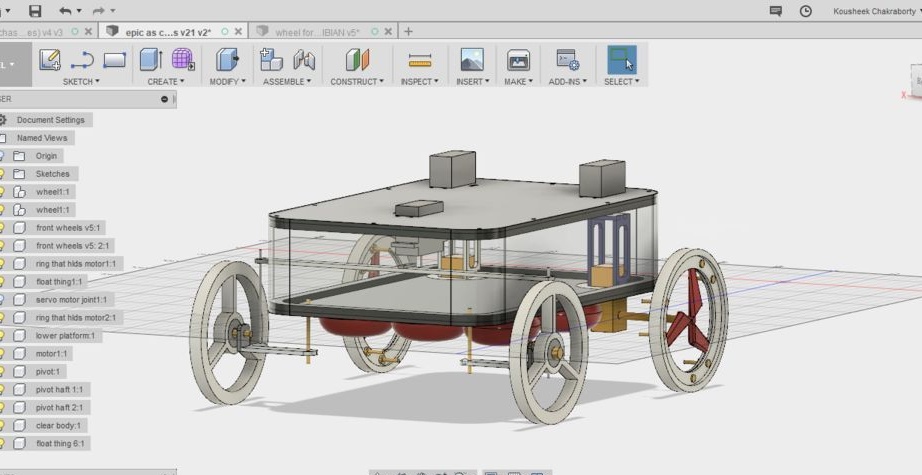
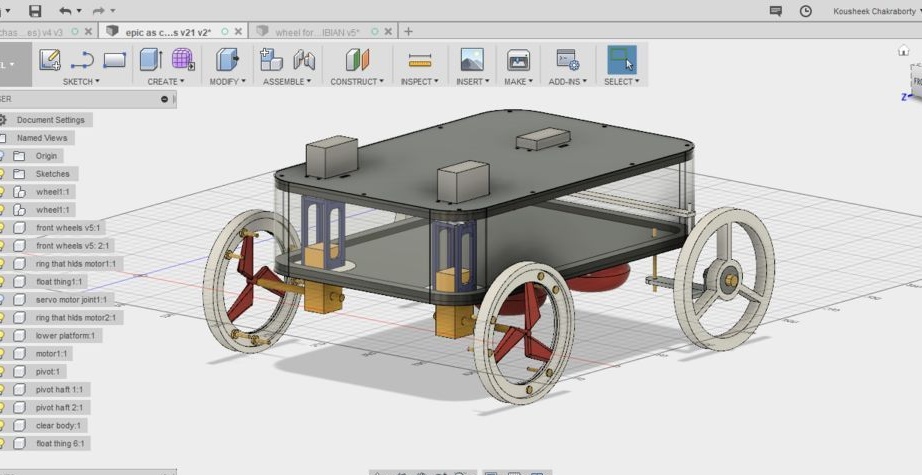
A les imatges de sota es pot veure la transformació del vehicle tot terreny quan es mou per terra i aigua.
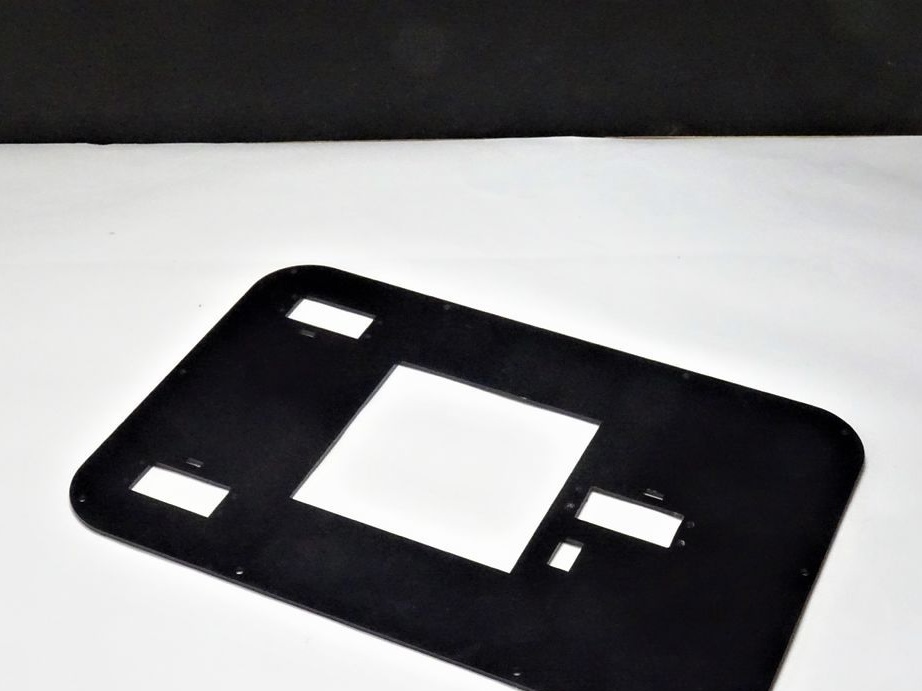
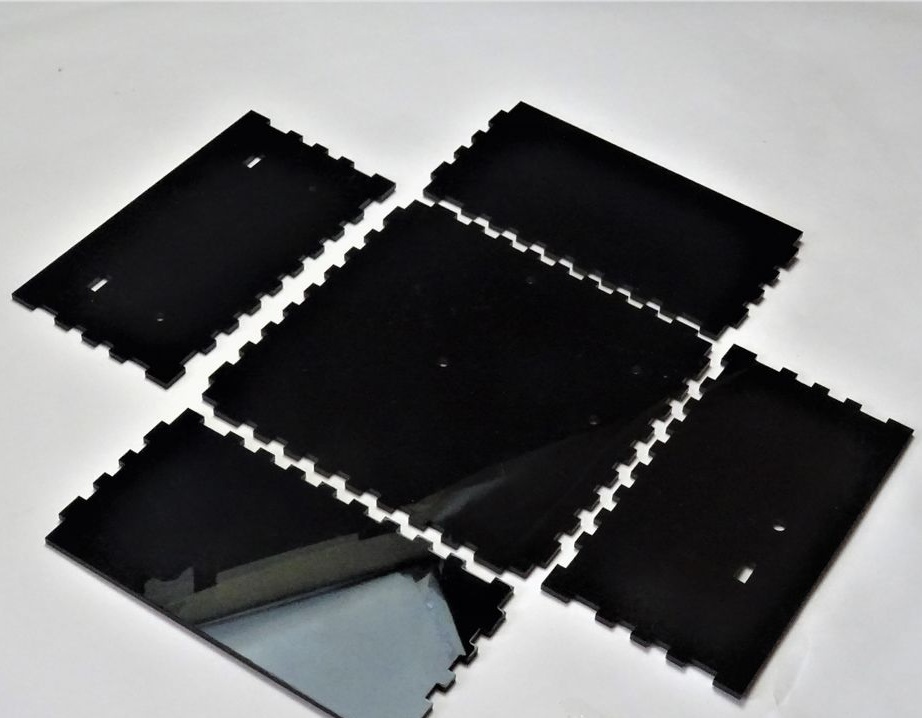
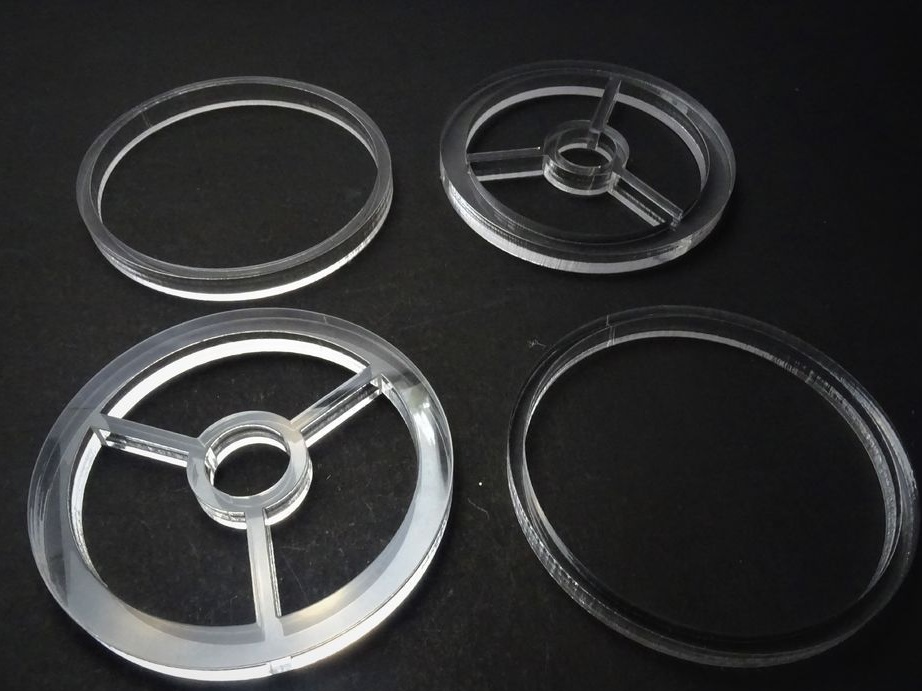
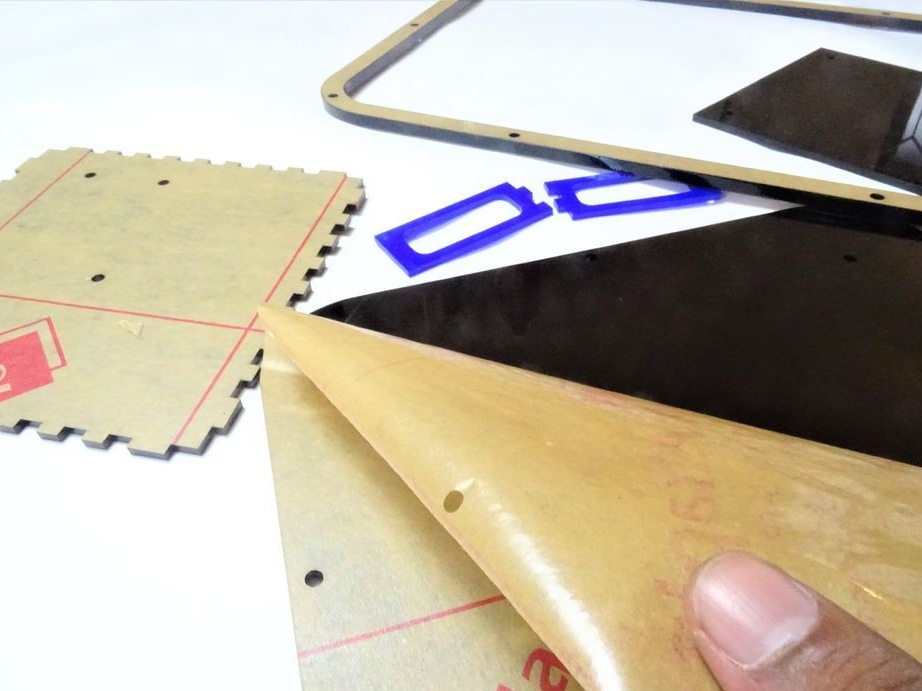
Segon segon: Tall làser
Per al vehicle tot terreny, el mestre va utilitzar acrílic de diferents gruixos i colors.
Abric superior negre 3 mm x 1
Capa inferior negre 3 mm x 1
Marc lateral lateral 5 mm x 2
Paret lateral transparent 2 mm x 1
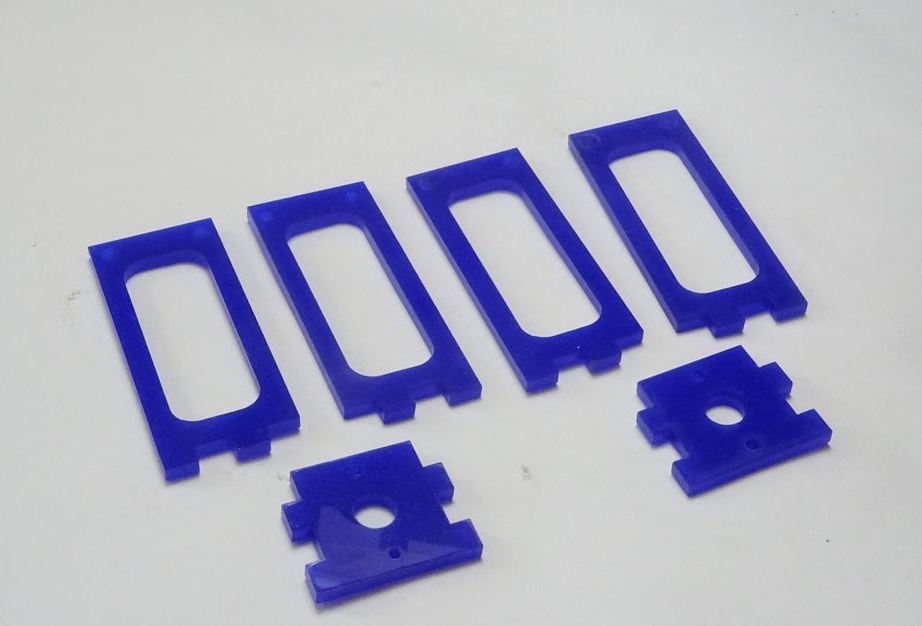
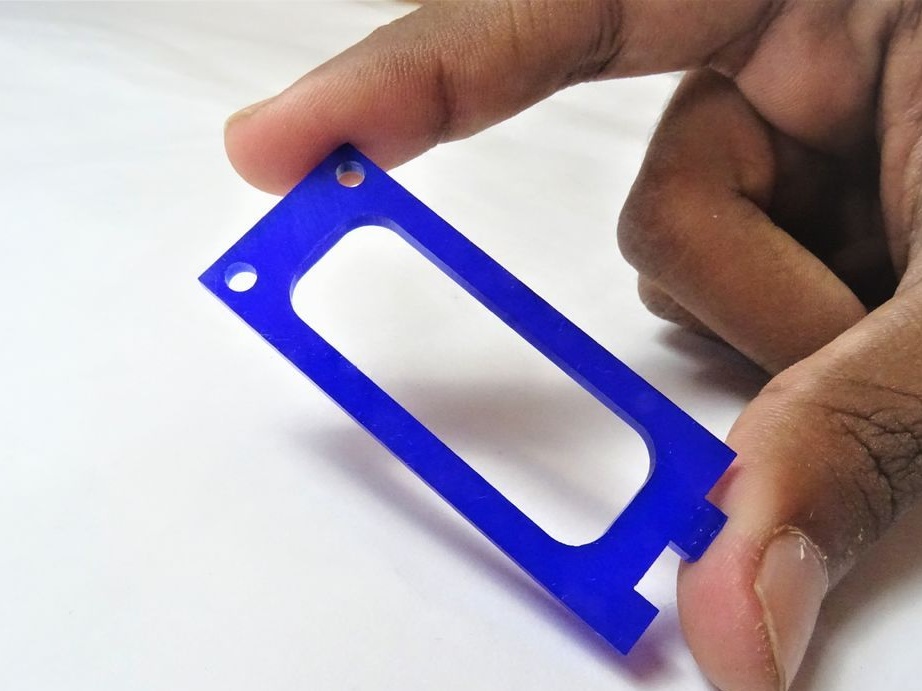
Potència lateral blau 3 mm x 4
Peça superior pont blau 3 mm x 2
Disc del motor Blanc 3 mm x 2
Roda davantera blanca de 10 mm x 2
Llanta interior (roda posterior) Blanc 3 mm x 4
Llanç exterior (roda posterior) Blanc de 10 mm x 2
Blanc de direcció 3 mm x 1
Armari calaix Negre 3 mm x 1
Coberta del compartiment negre 3 mm x 1
Eix del motor posterior Blanc de 3 mm x 2
Panell frontal blanc 5 mm x 2



Podeu descarregar el fitxer del CNC des de l’enllaç.
Tall de làser Rover Parts.zip
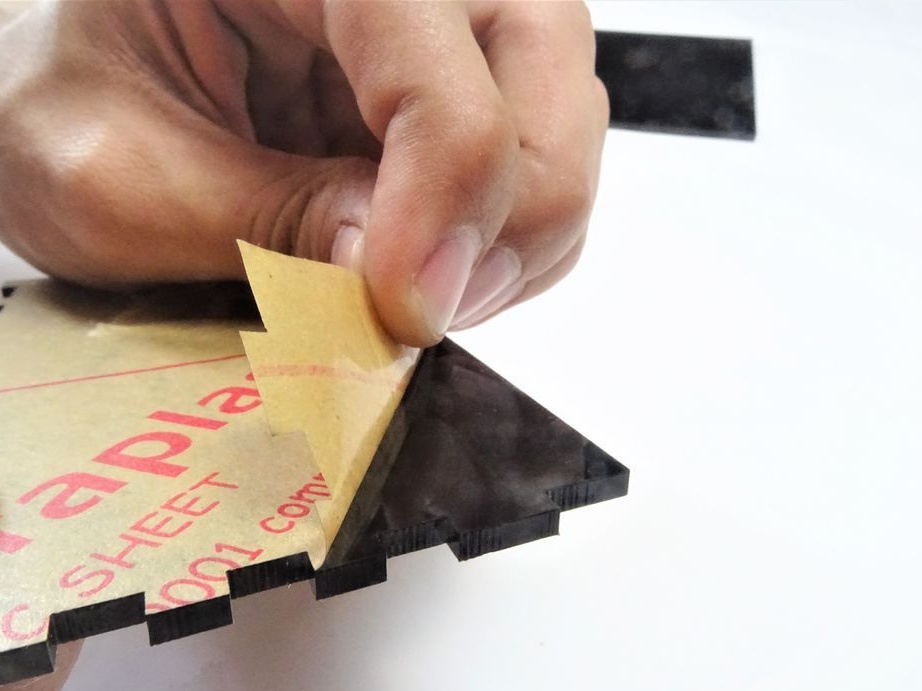
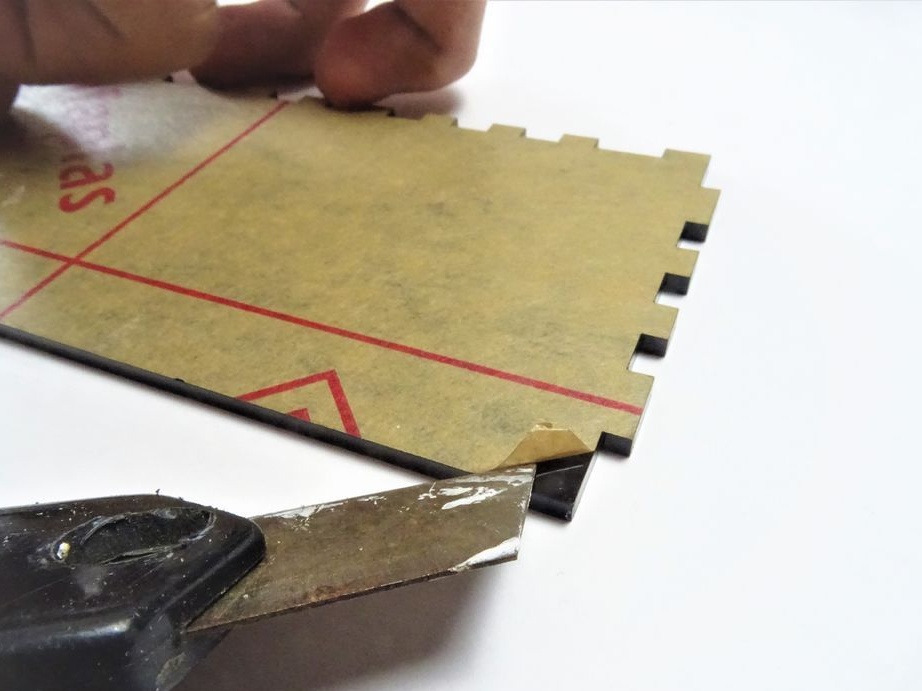
Després de fabricar les peces, traieu-ne la capa protectora.
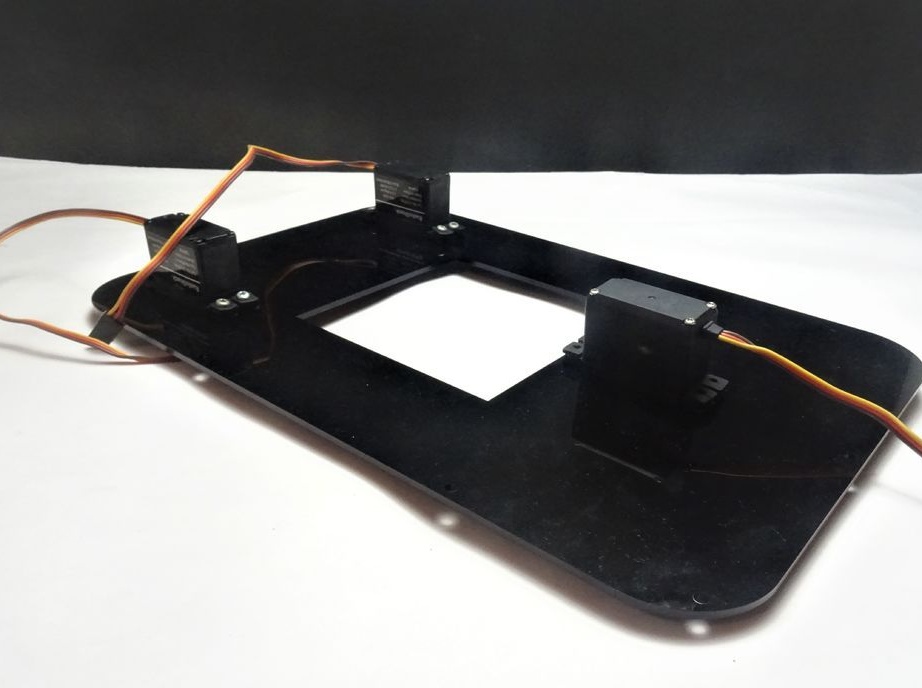
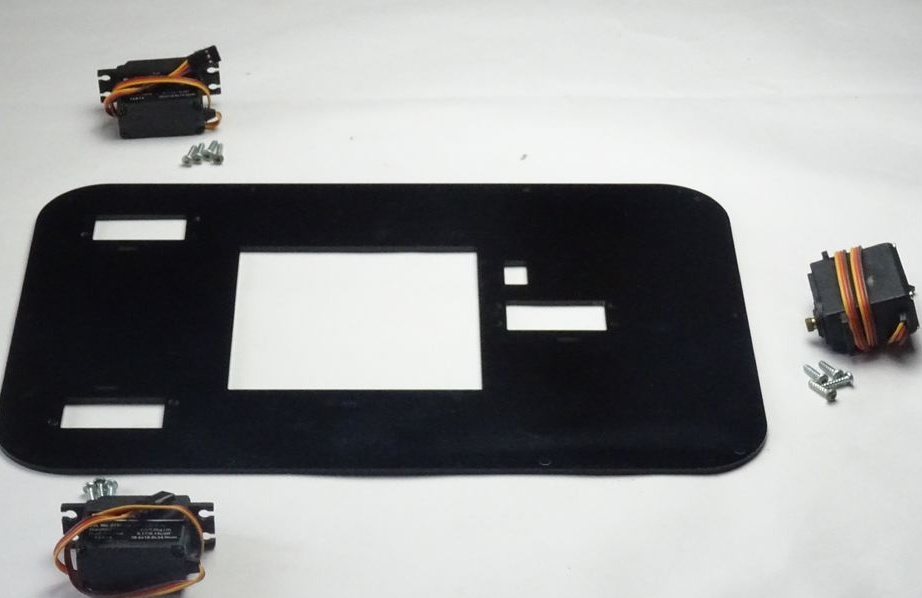
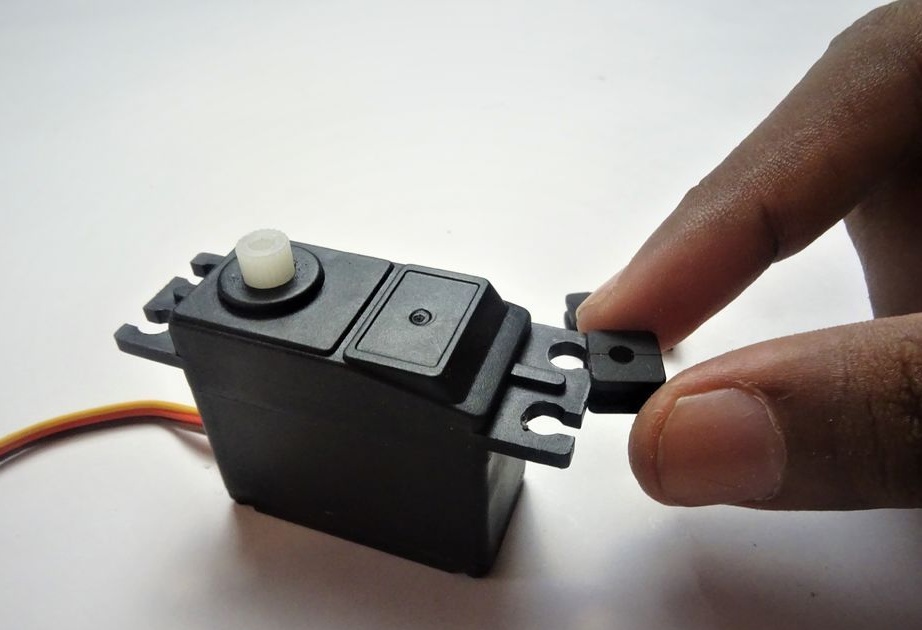
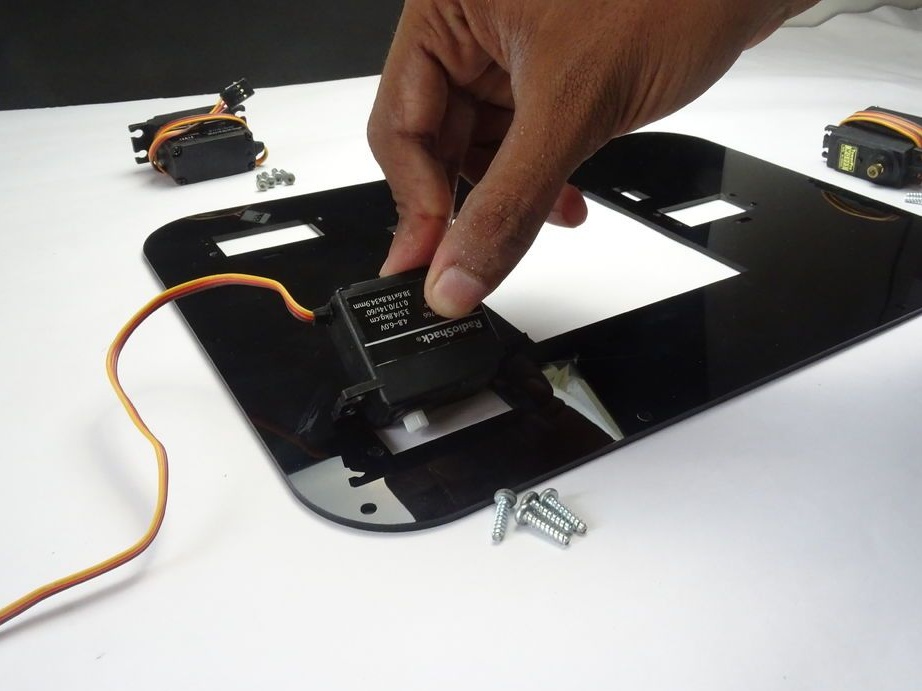
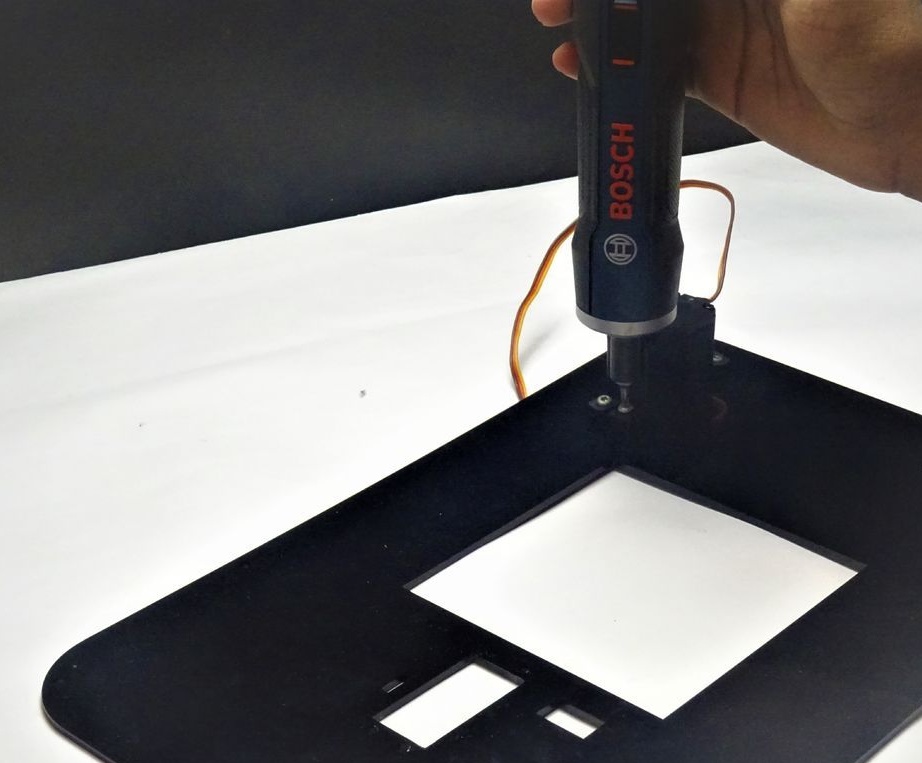
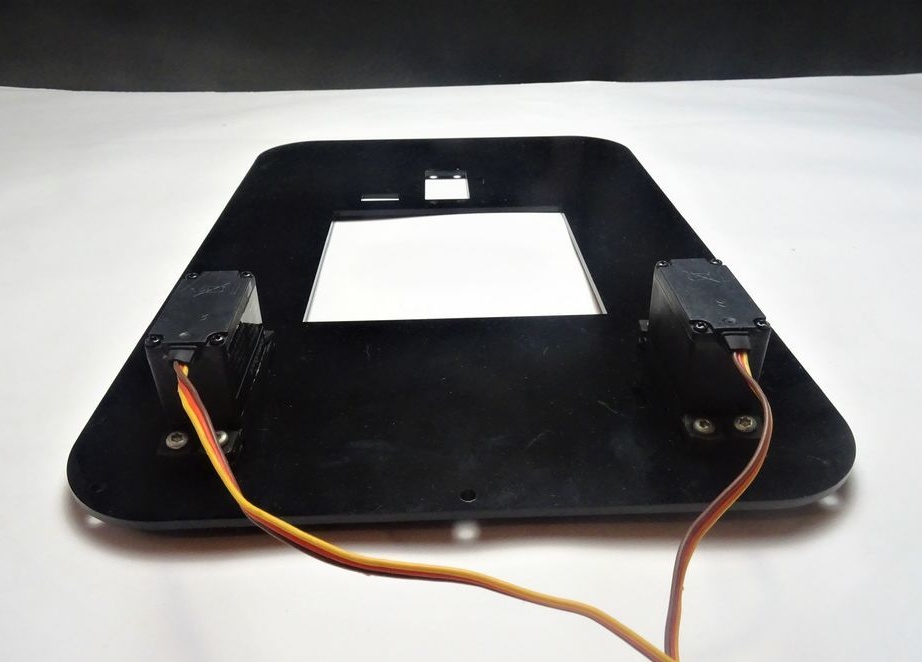
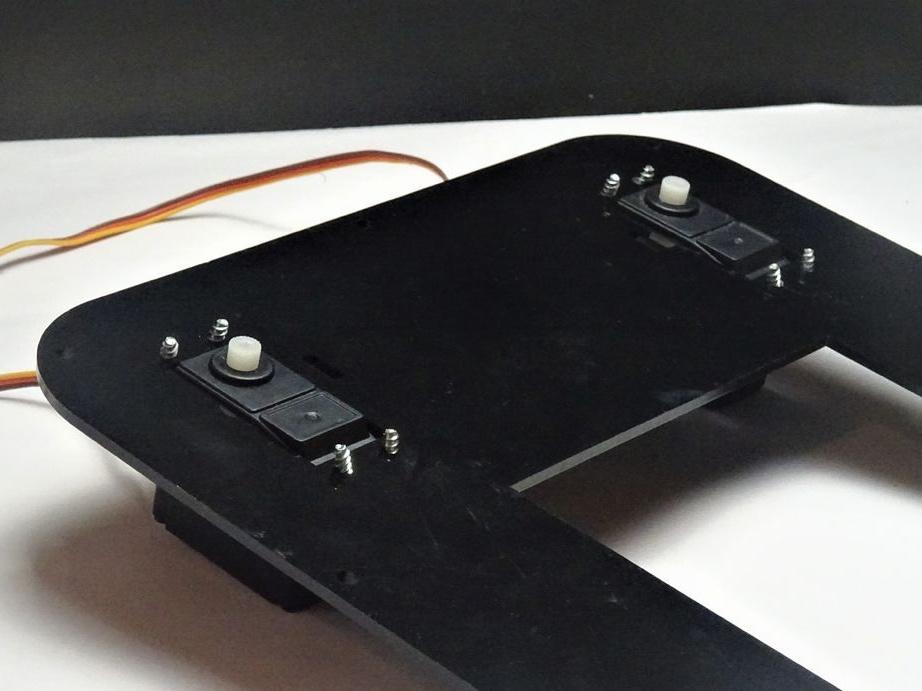
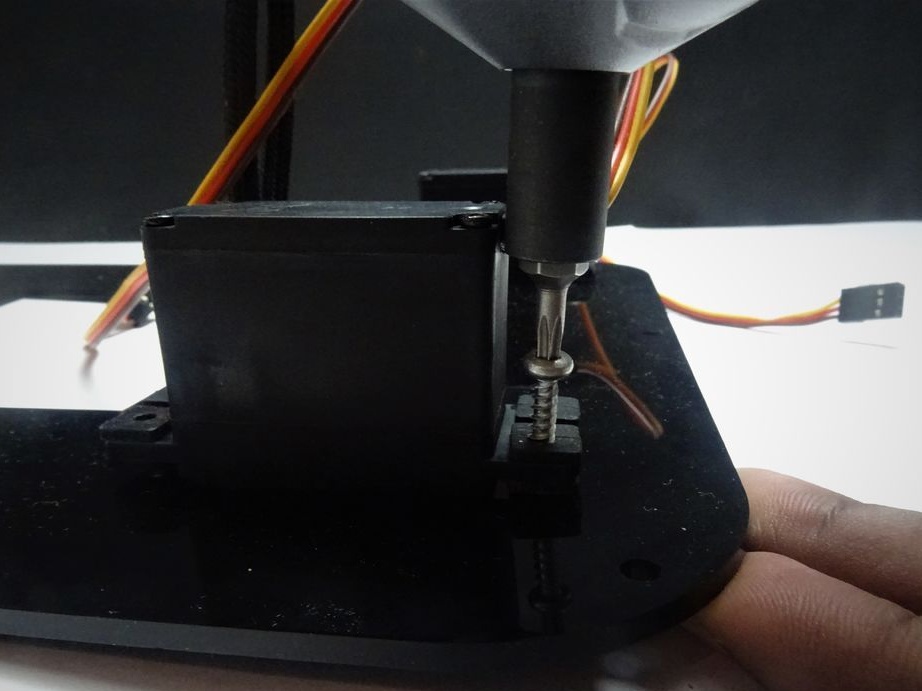
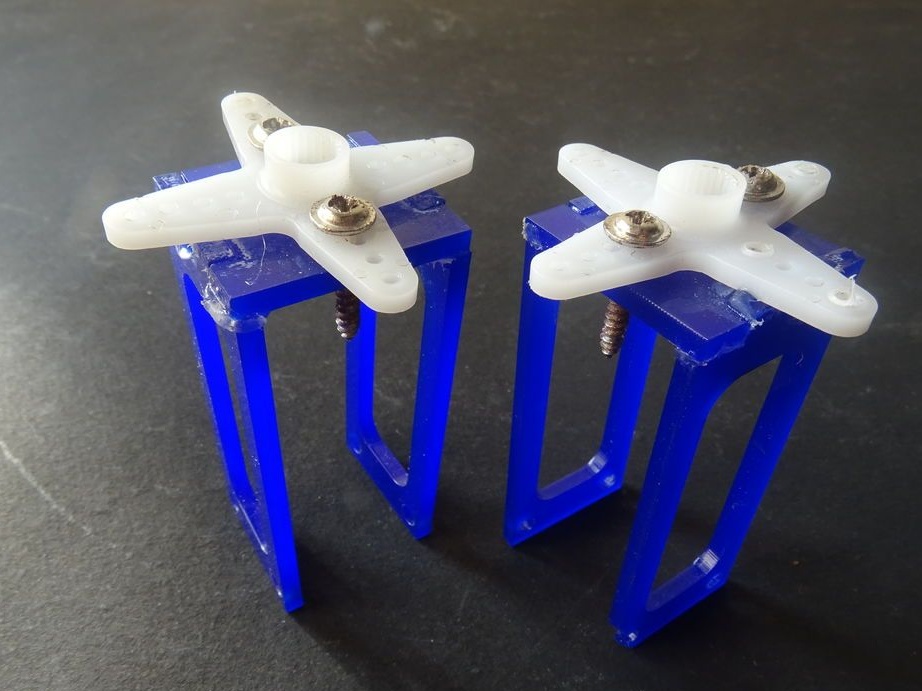
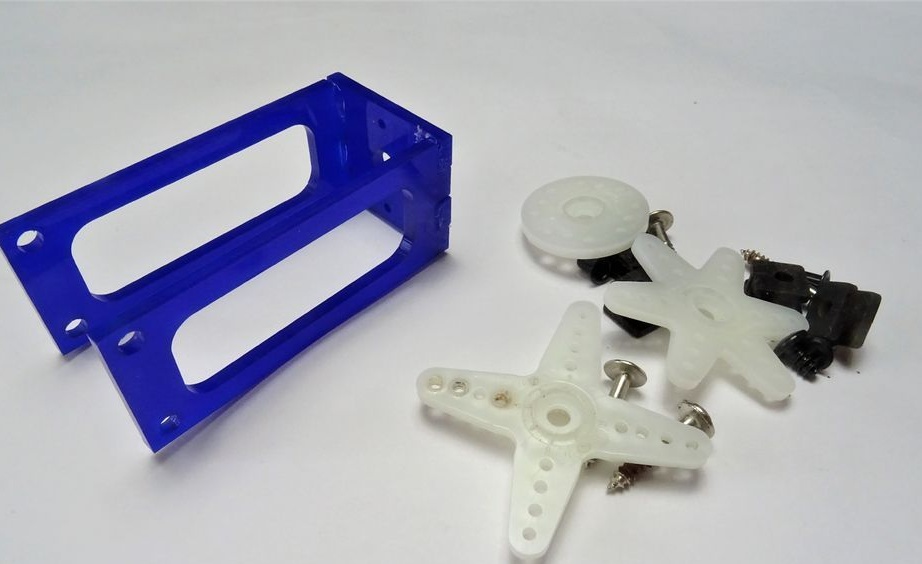
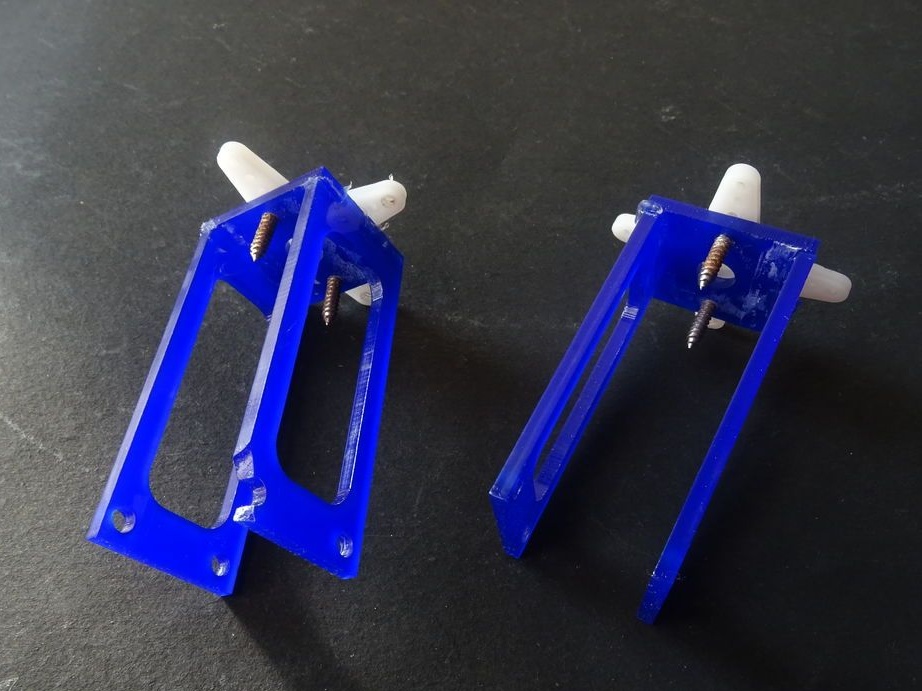
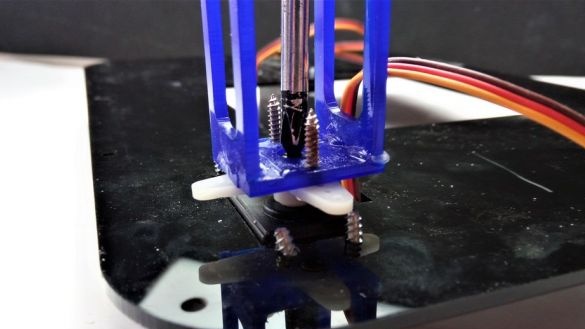
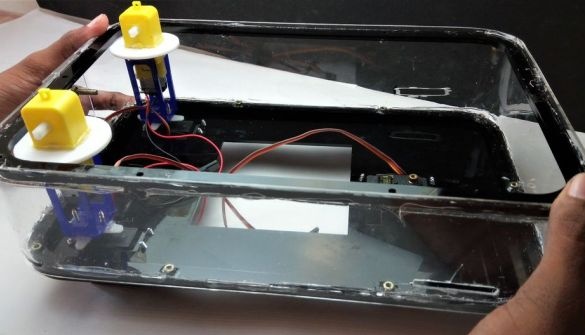
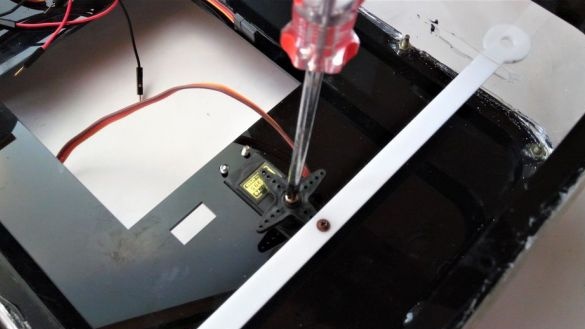
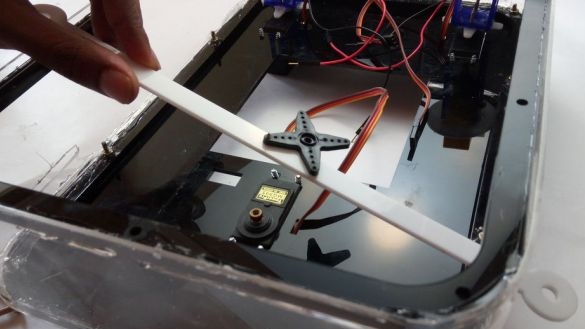
Tercer pas: Instal·leu Servo Motors
Els tres servomotors estan cargats a la plataforma. Dos a la part posterior i un a la part davantera.

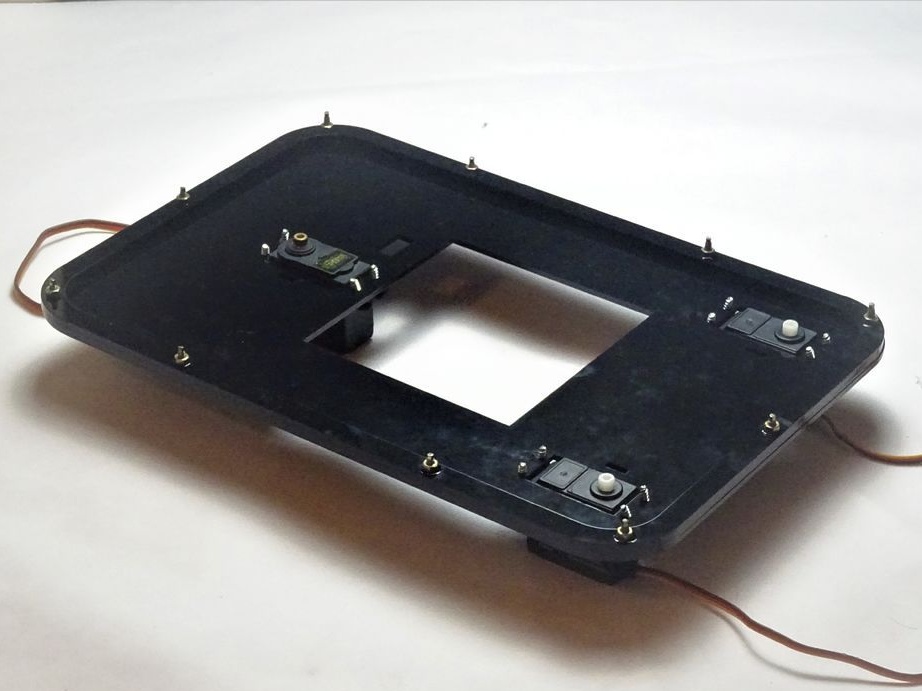
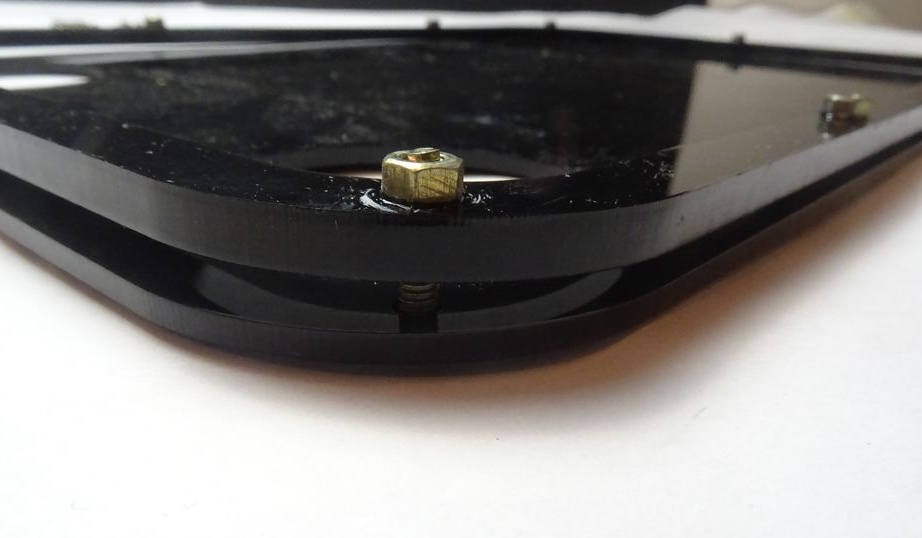
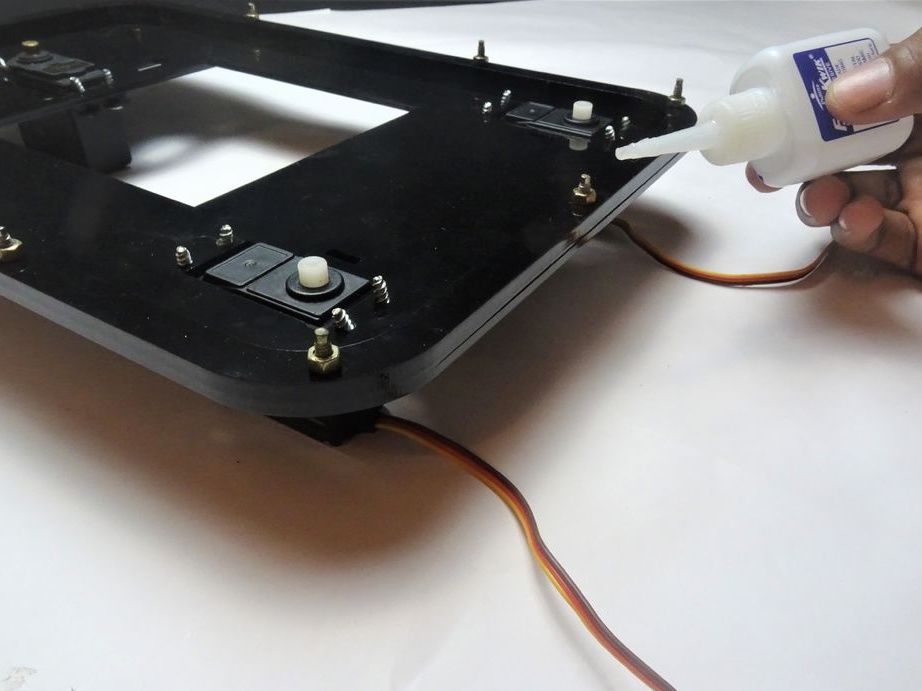
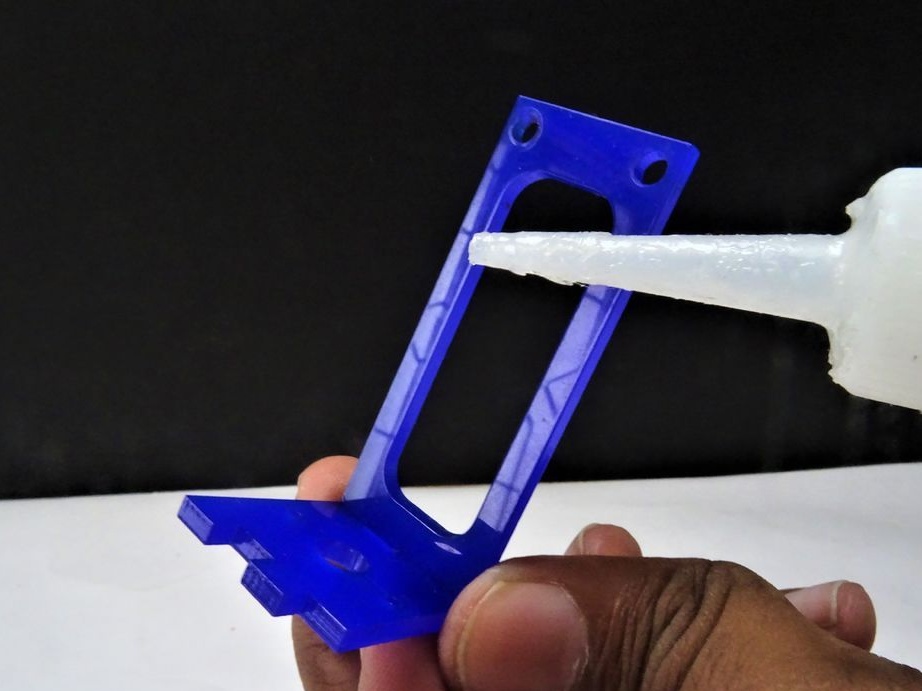
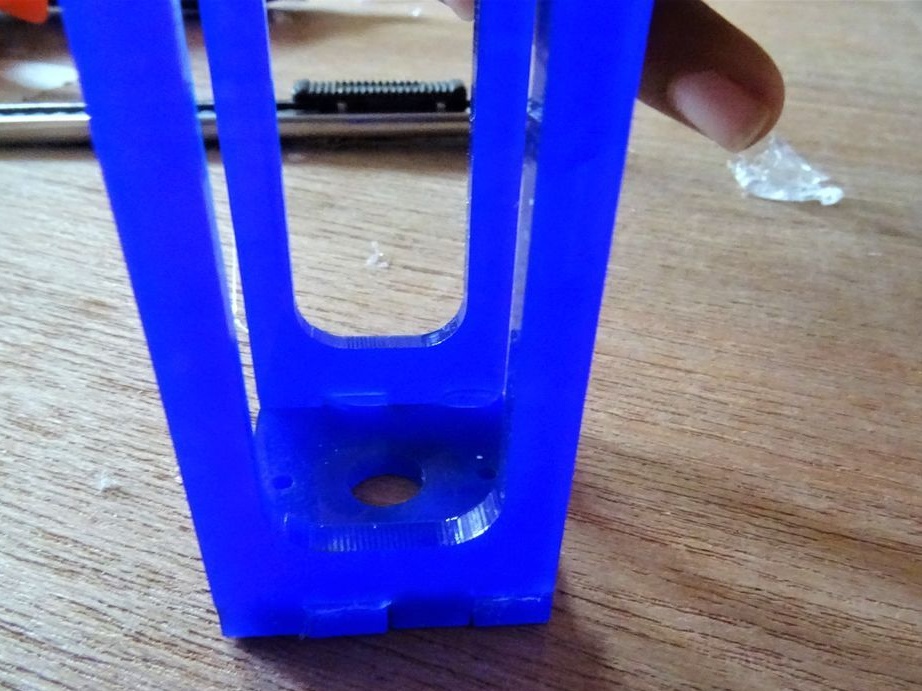
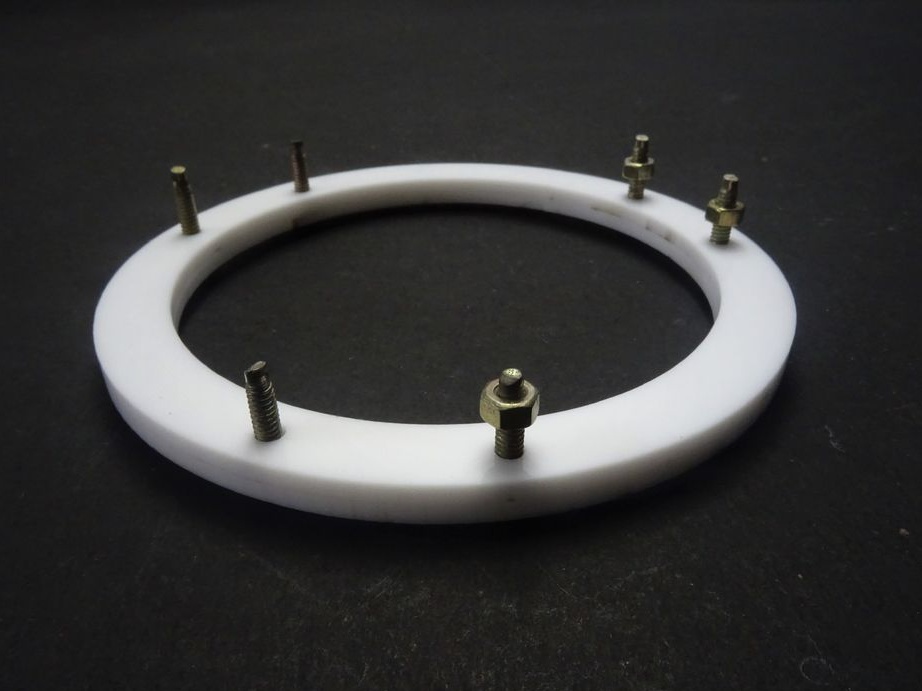
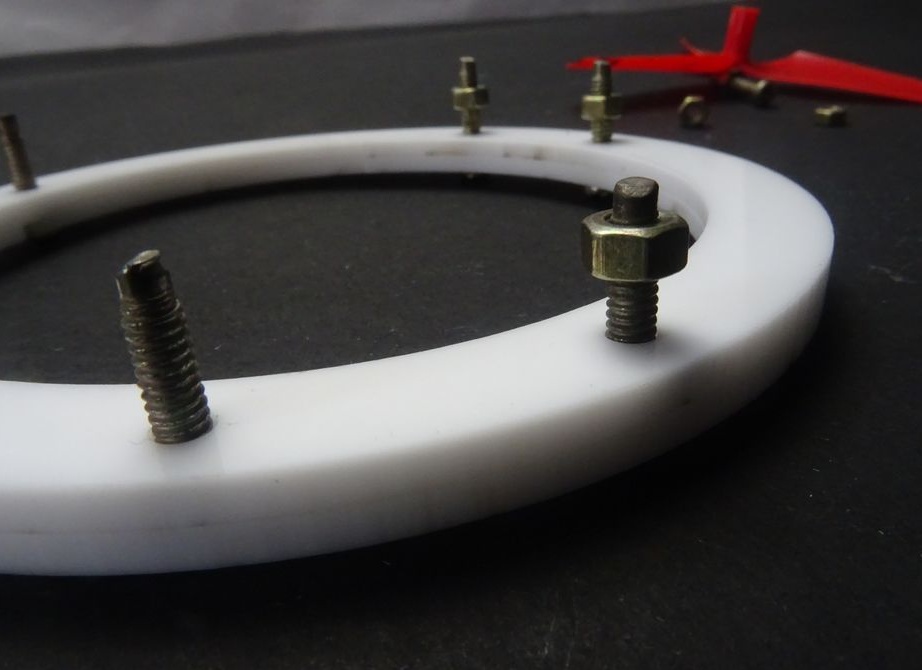
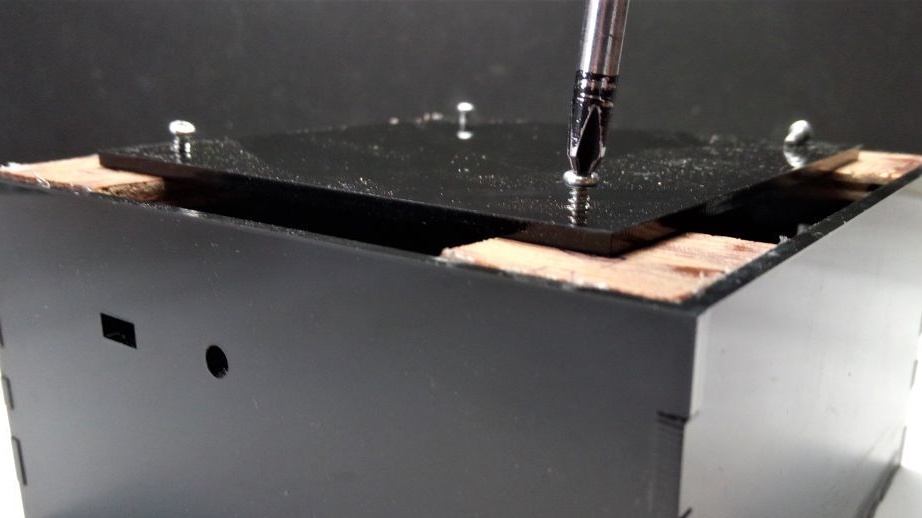
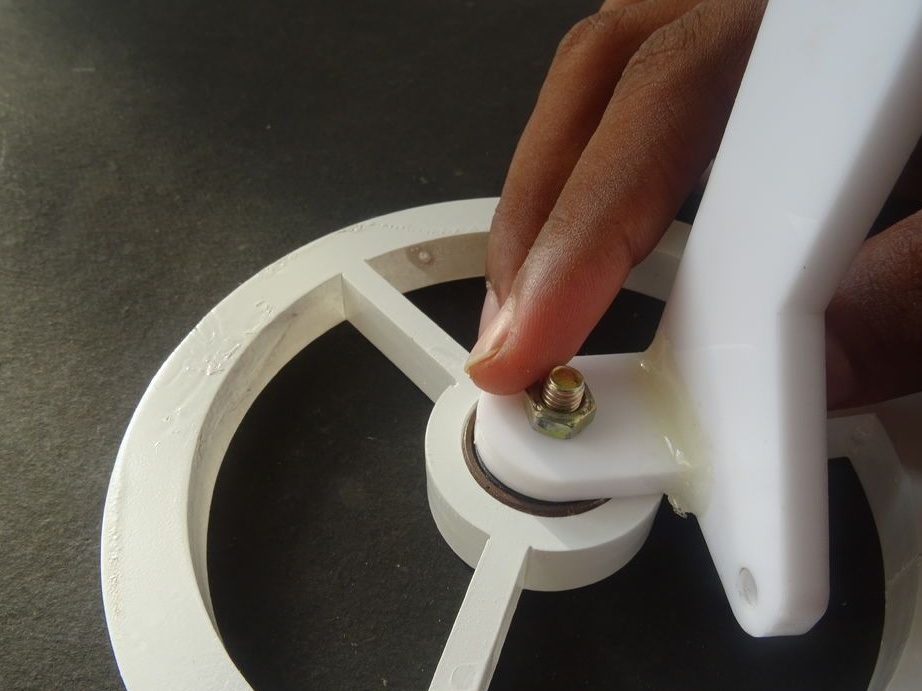
Quatre pas: Nous
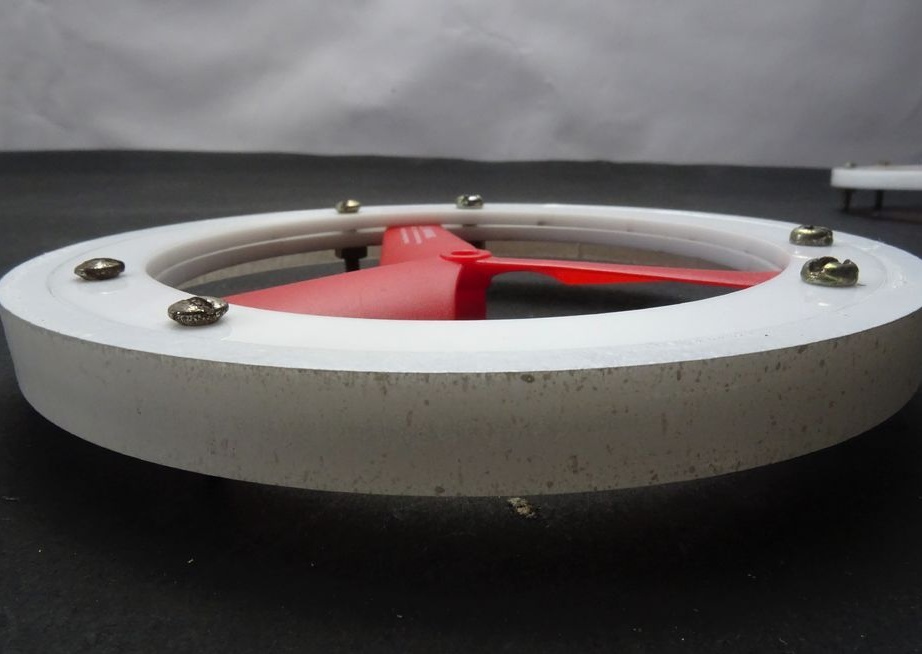
Per accedir als mecanismes, les parts superior i inferior estan enrololades entre si. Enganxeu els fruits secs de la superliga al marc i, després, es reforcen amb epoxi.


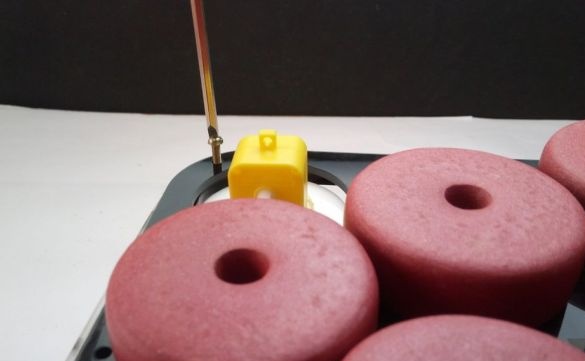
Cinquè Pas: Surenes
La cola sura.



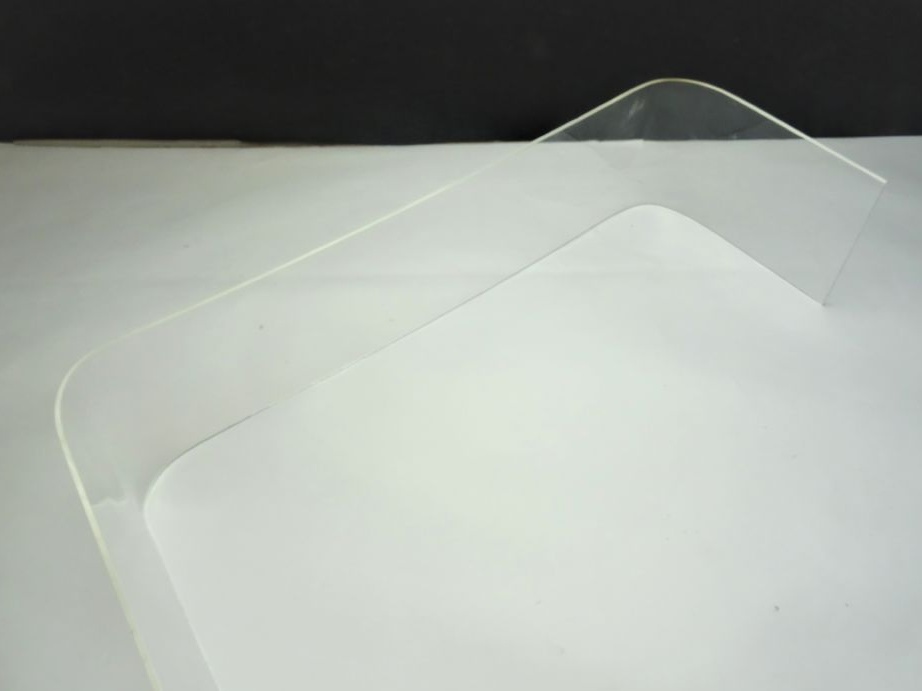
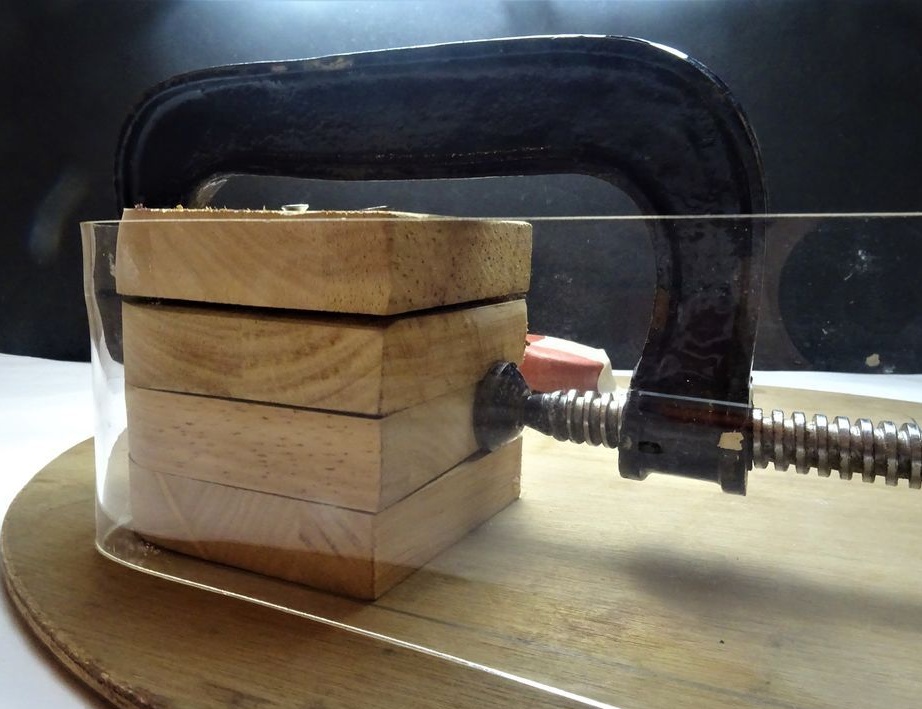
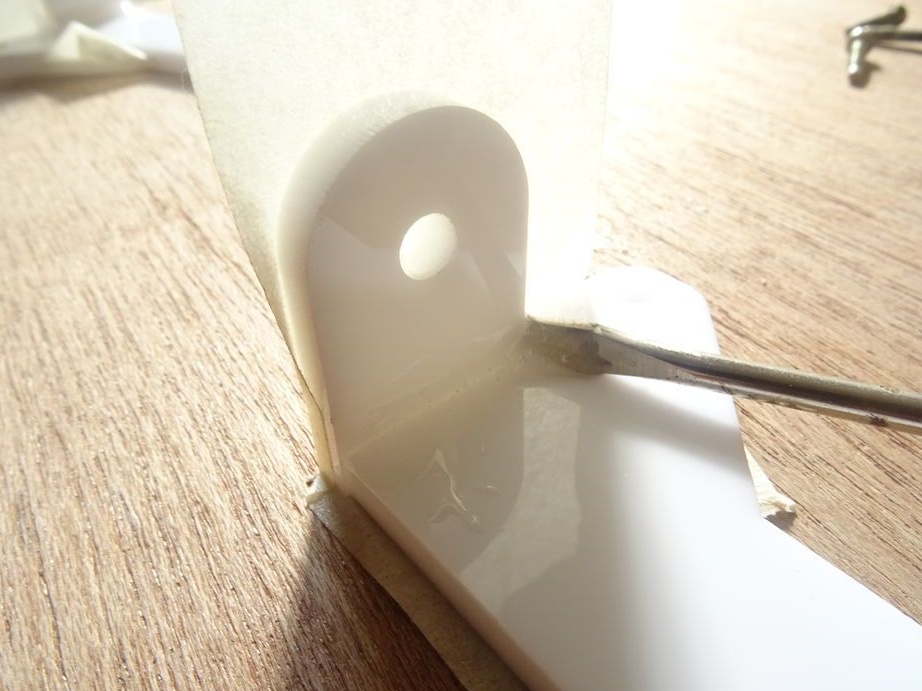
Pas sisè: modelat d’acrílic
Per doblar l’acrílic, un artesà fa una plantilla de fusta.



Agafa la part amb una pinça i, escalfant-la amb un assecador, proporciona a la part la forma desitjada.





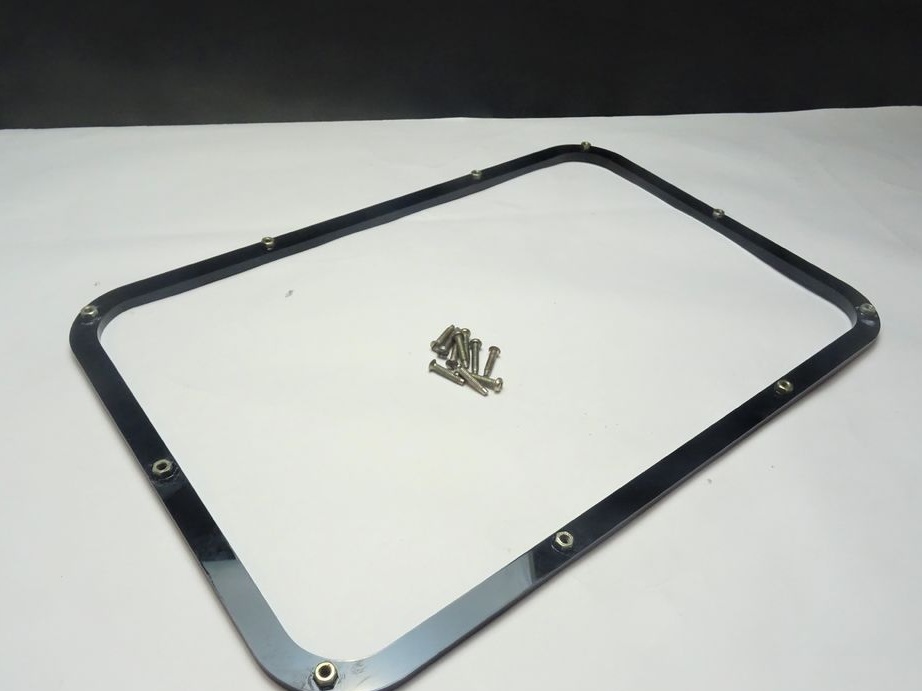
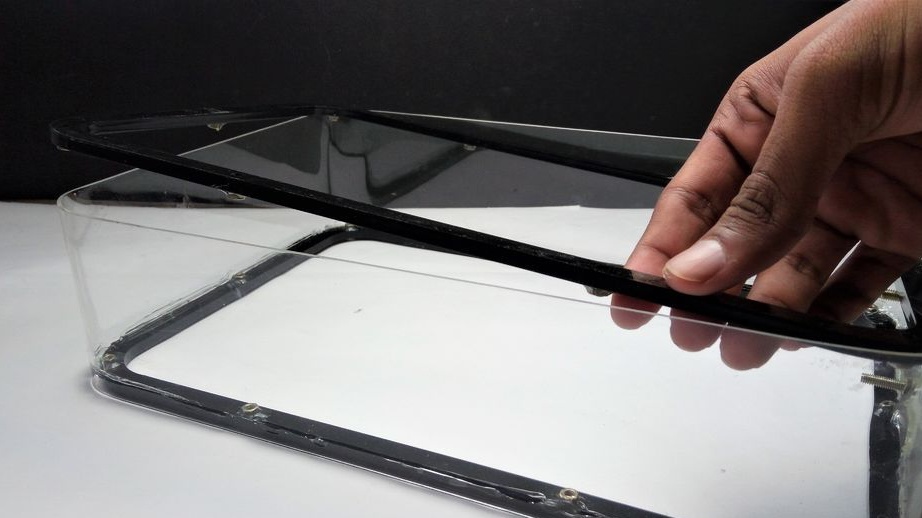
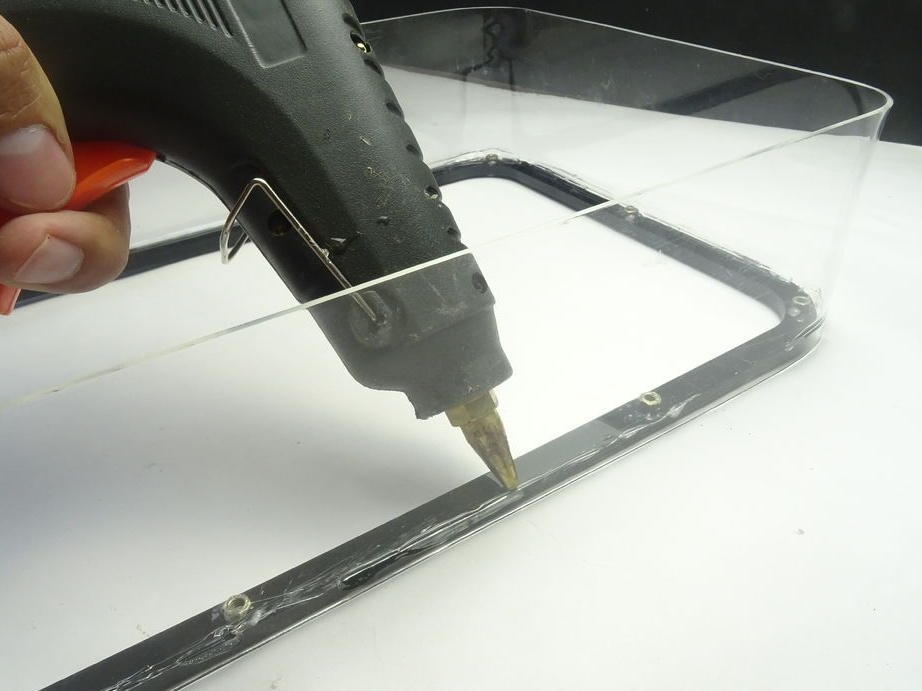
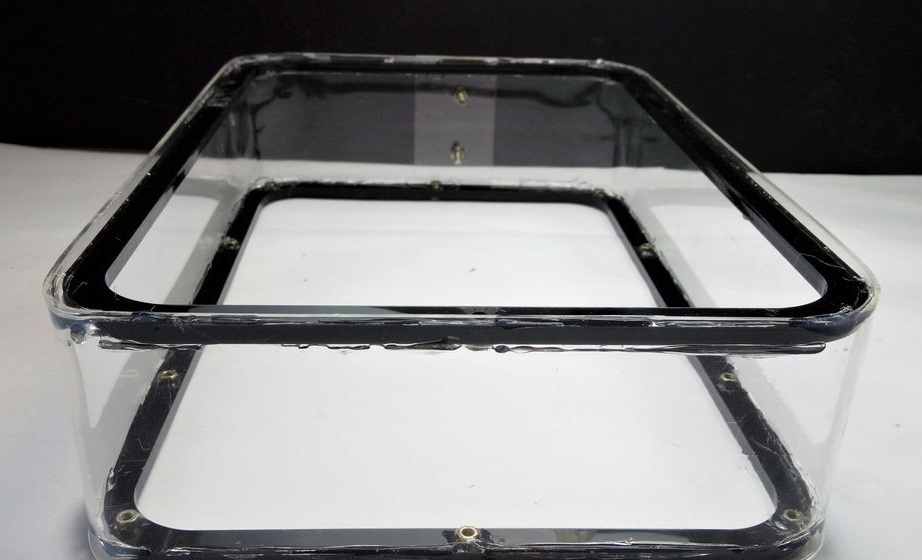
Setè pas: marc
Enganxa els marcs superior i inferior al cos transparent. Les costures estan ben segellades amb cola calenta.







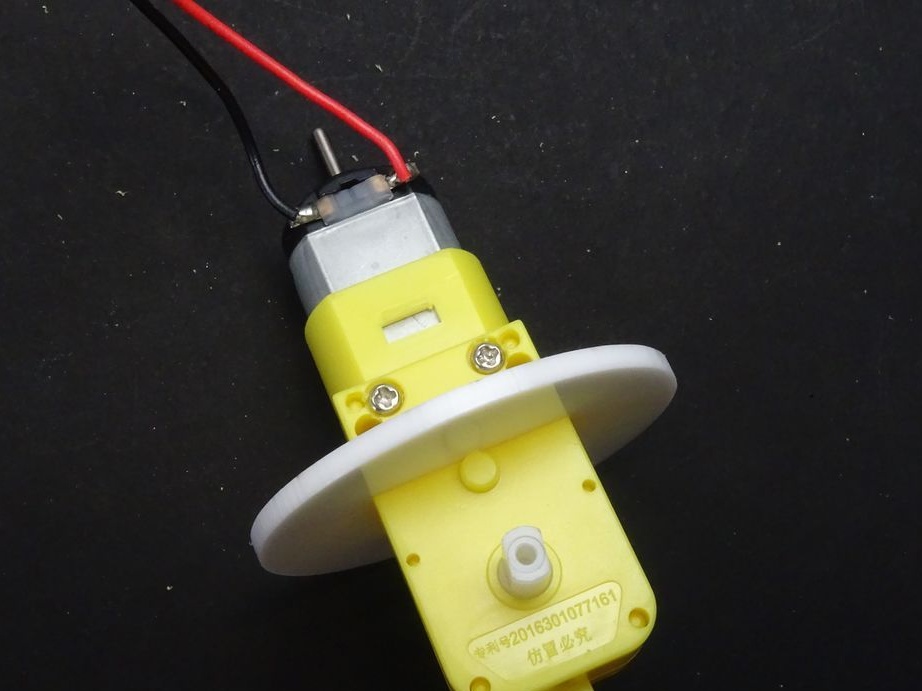
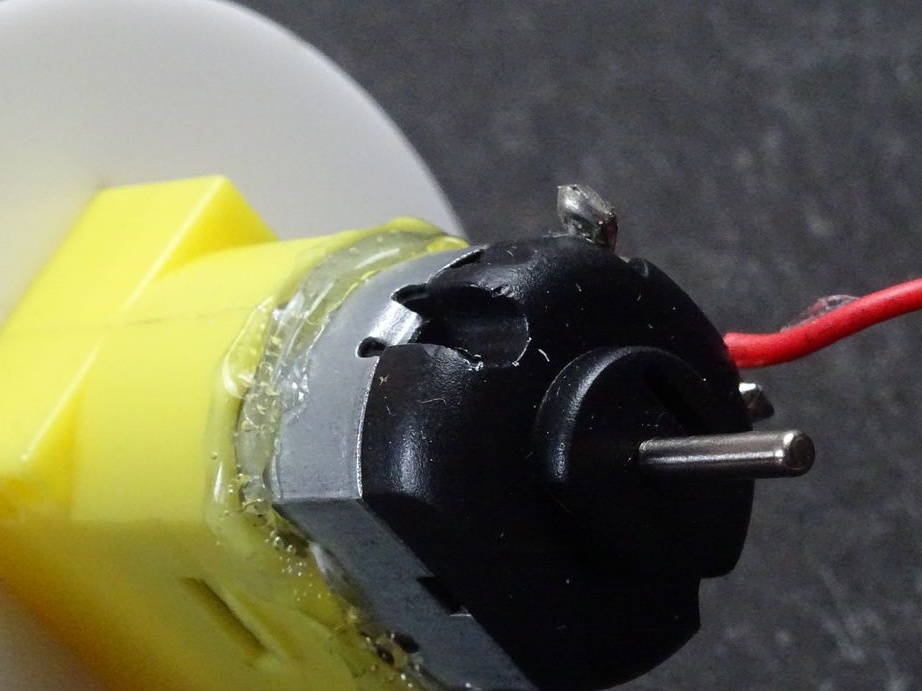
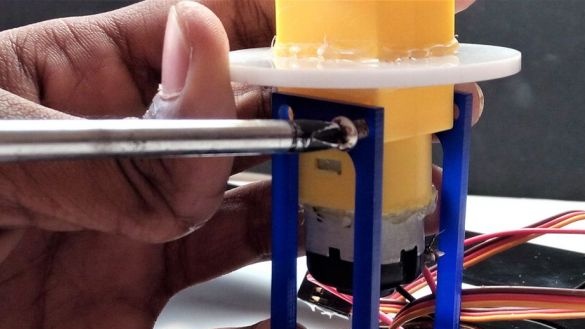
Pas vuit: Sintonització del motor
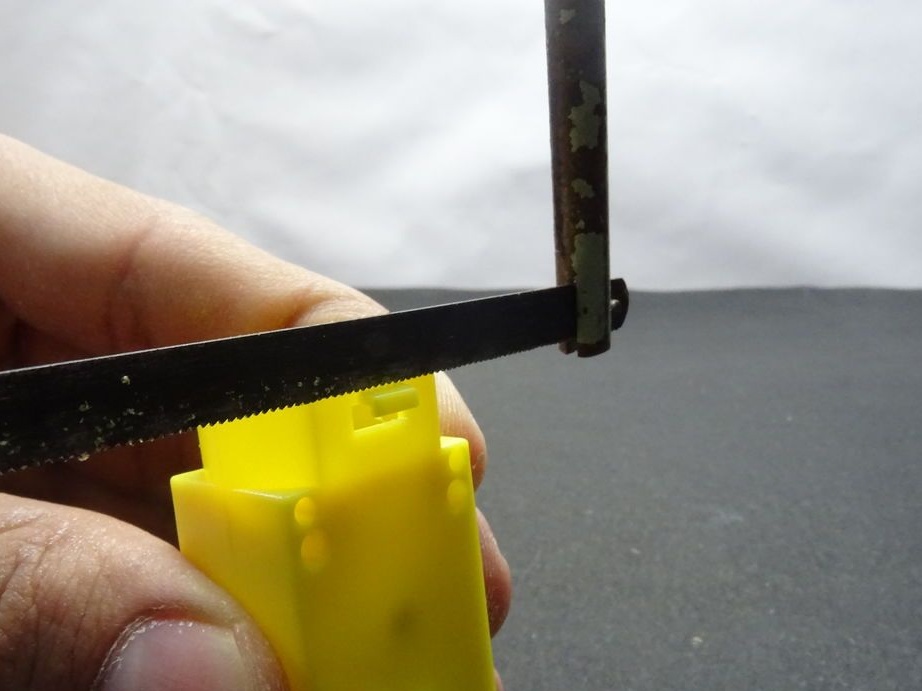
Ara necessiteu processar la carcassa del motor per instal·lar-hi peces.
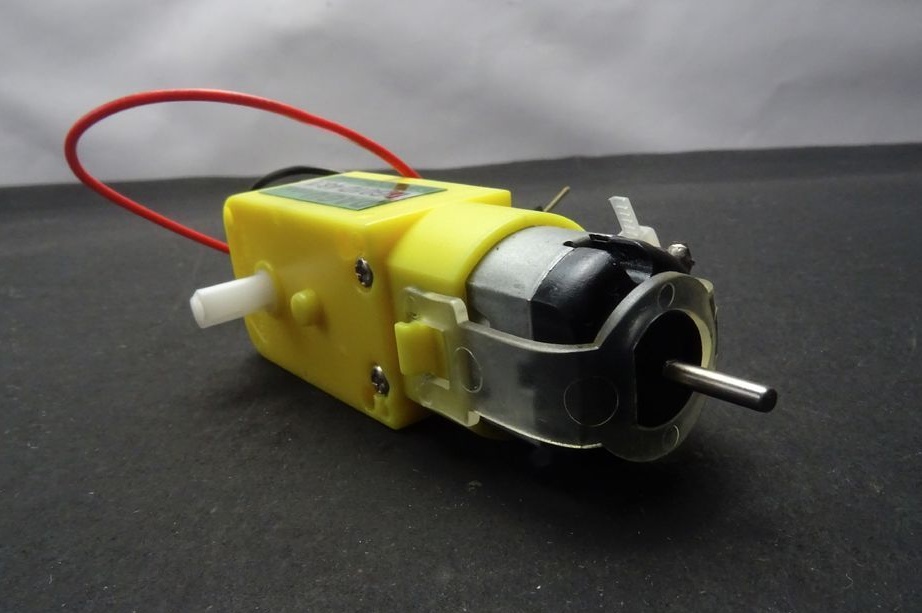
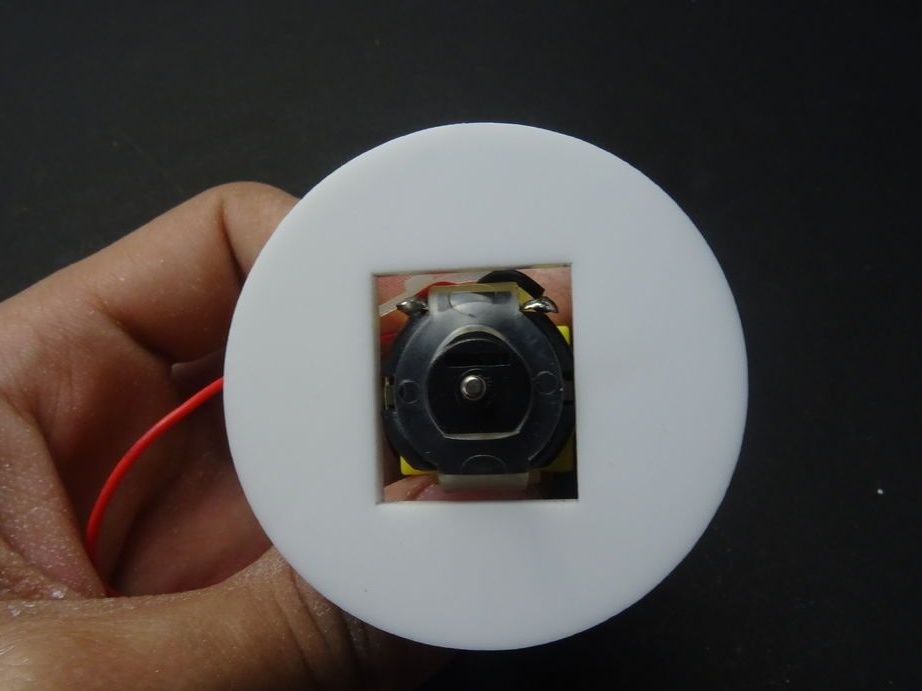
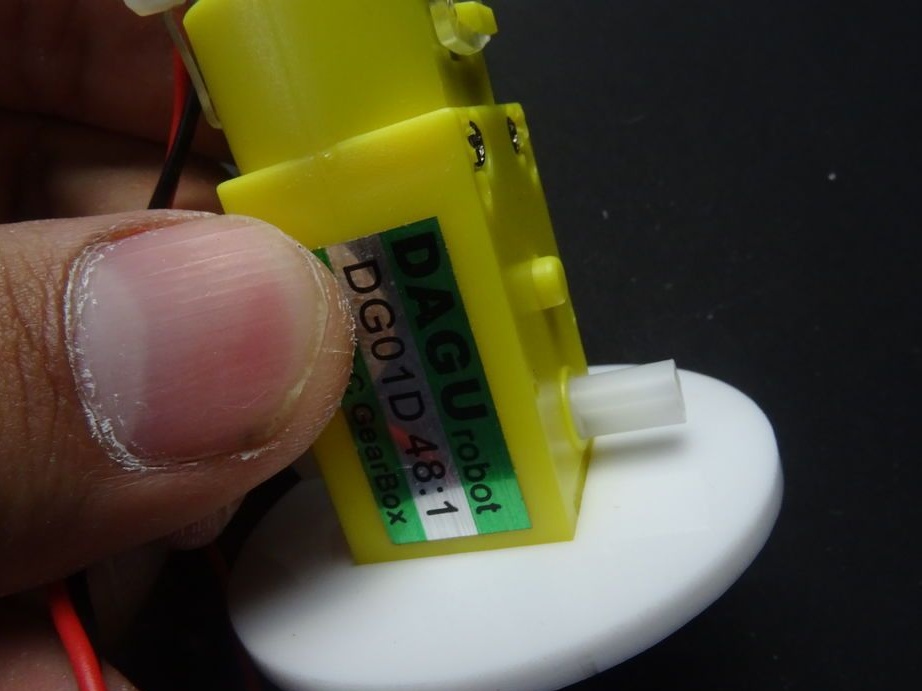

Retalla totes les parts que sobresurten del cos fins a l’adhesiu.
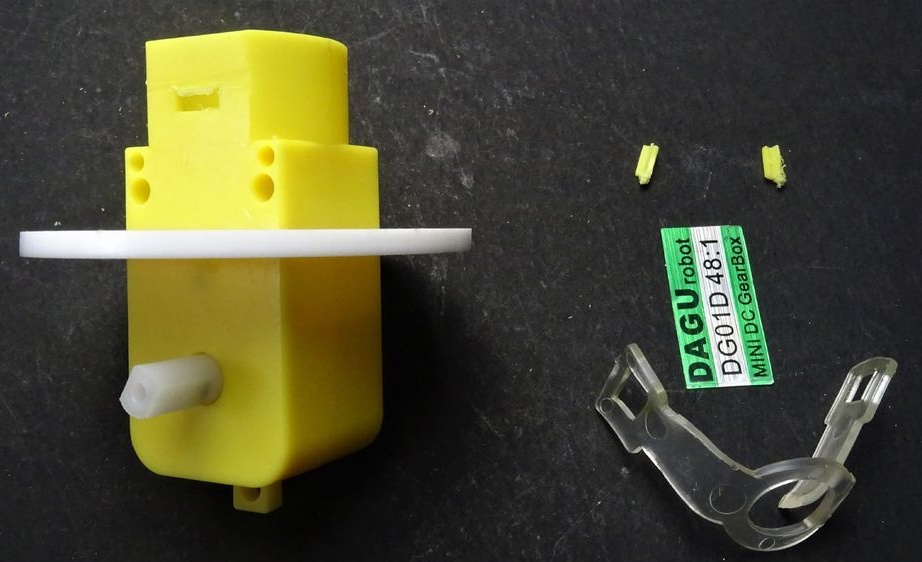

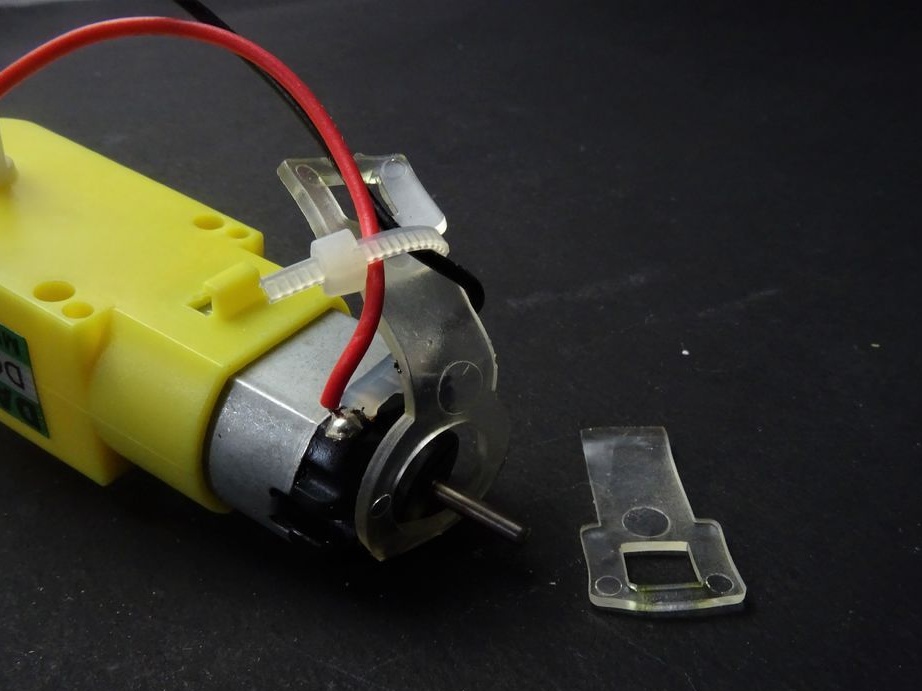


Instal·la la part sobre el cos i la enganxa. Com que era necessari tallar el suport del motor (panys), el motor també es fixa amb cola.

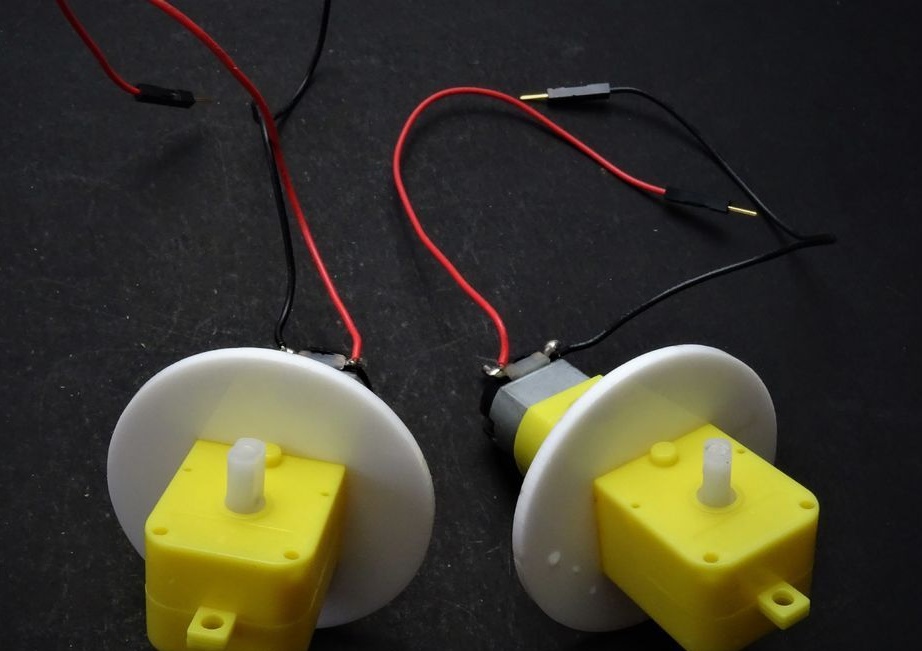

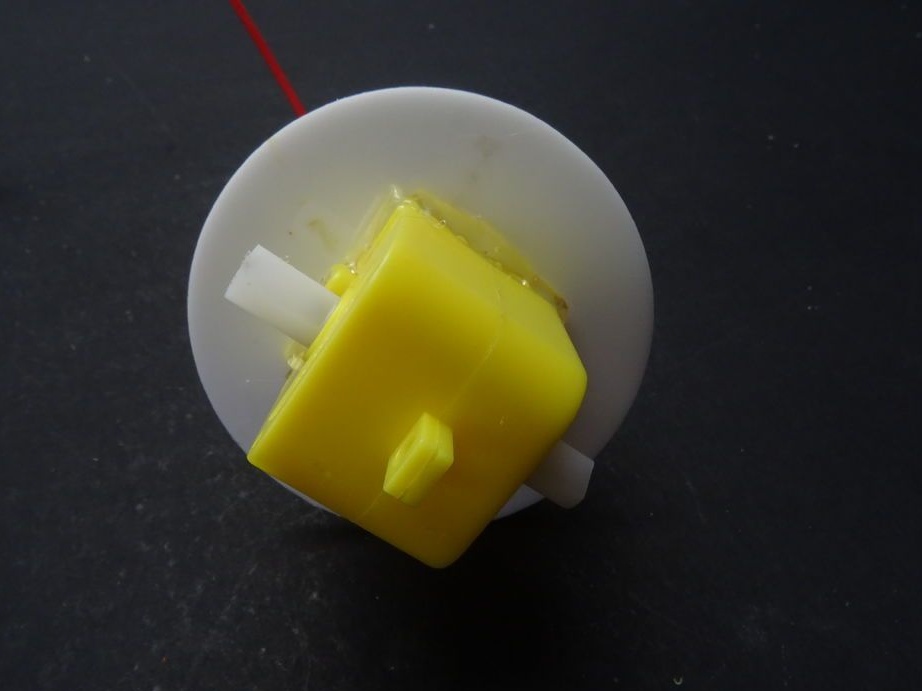
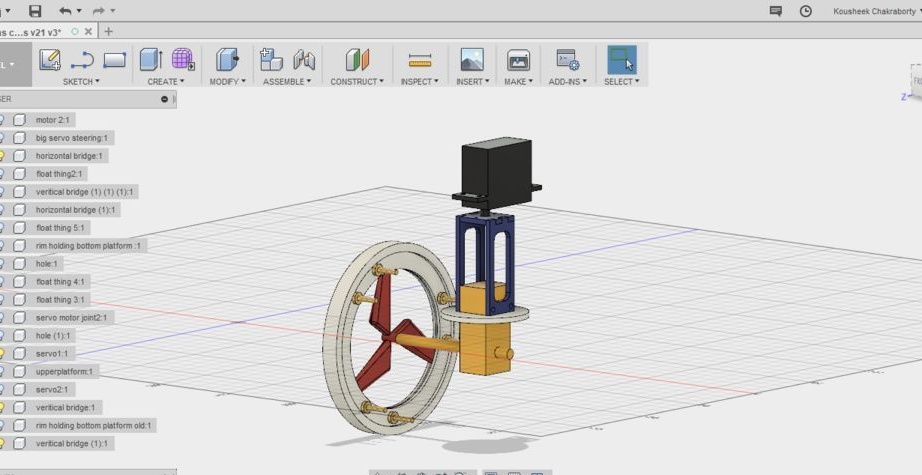
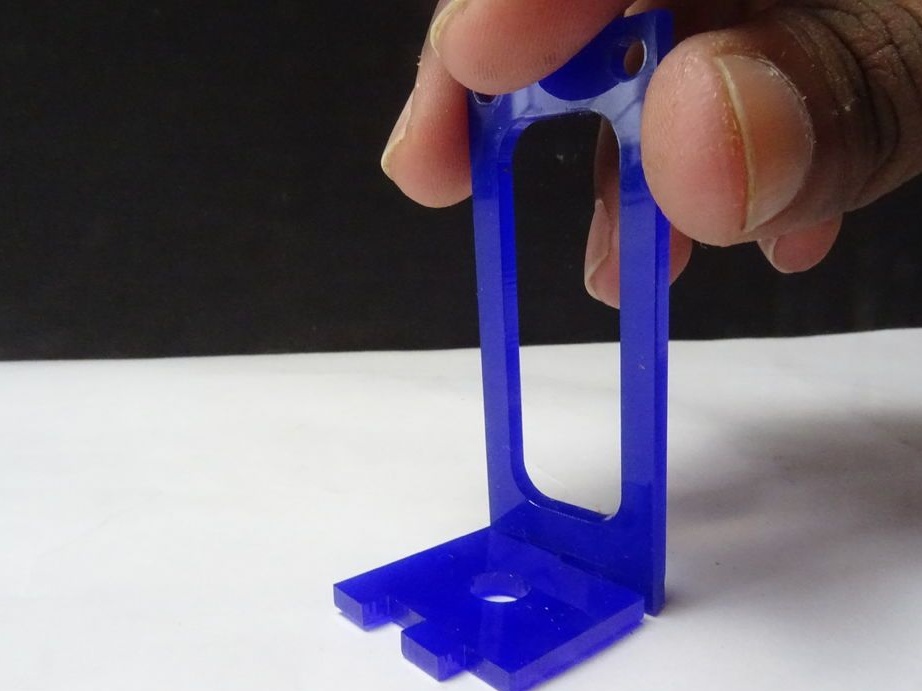
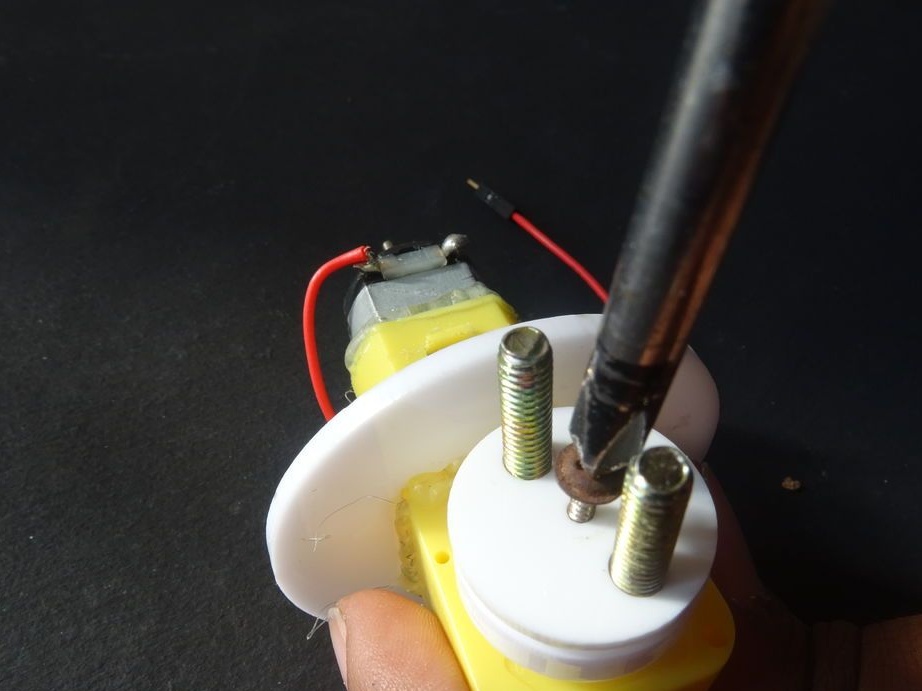
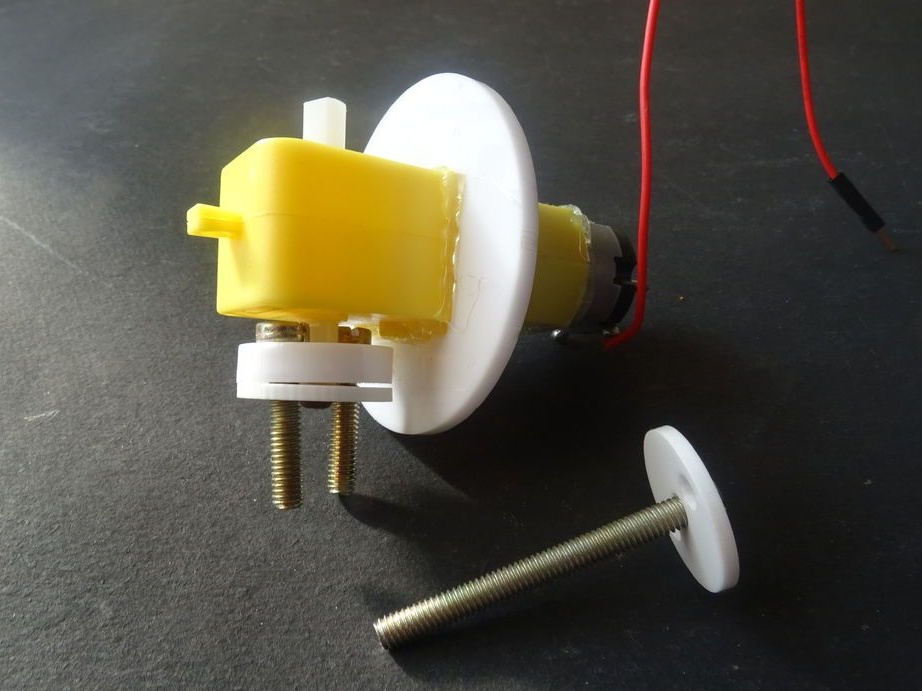
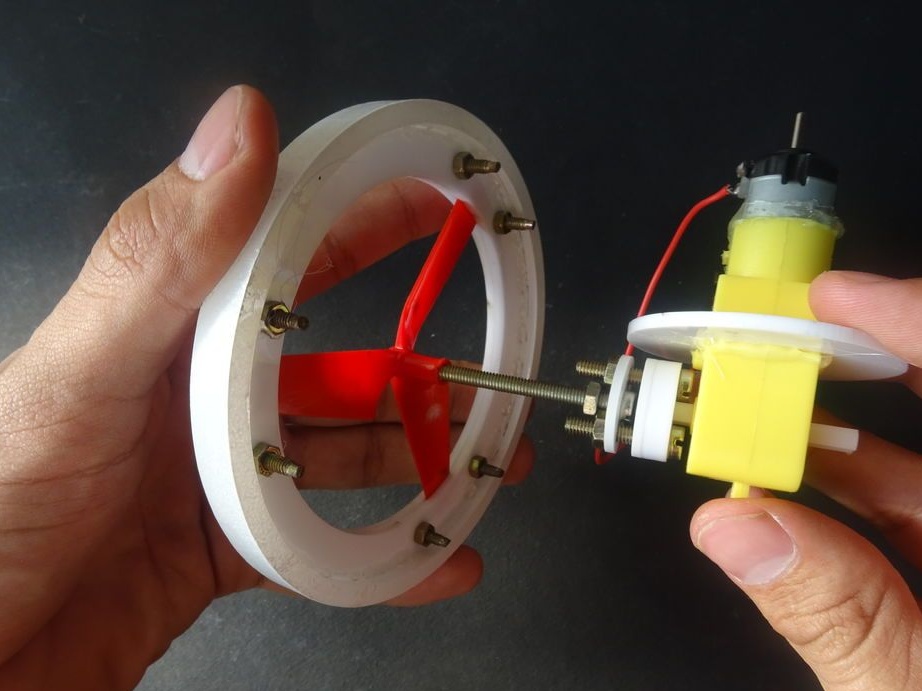
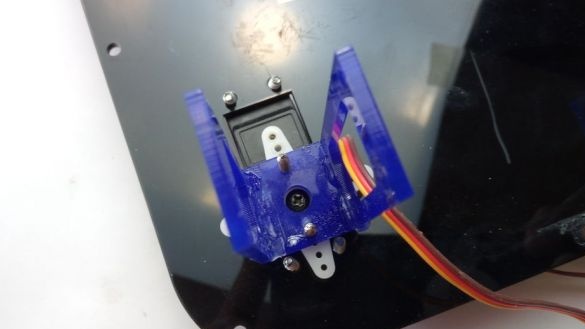
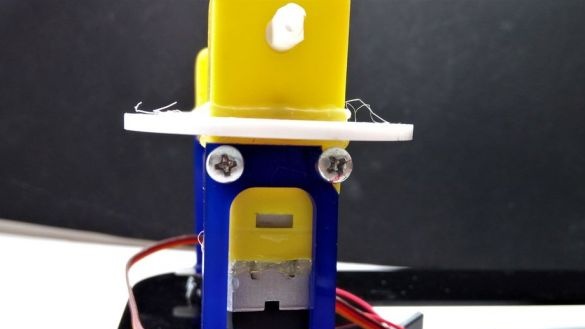
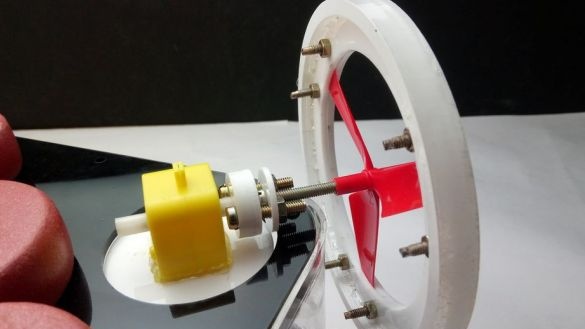
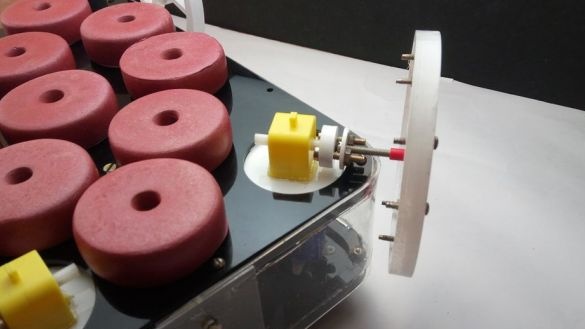
Nou pas: mecanisme giratori
Assembla una carcassa rotativa. S'hi instal·larà un motor i es connectarà al servoaccionament.
Colla el estoig.


Cargols a l’acoblador.


Pas deu: Pintura
Com que el mestre no tenia acrílic blanc del gruix necessari, les rodes i la llanta es van tallar en acrílic transparent i després es van pintar de blanc.




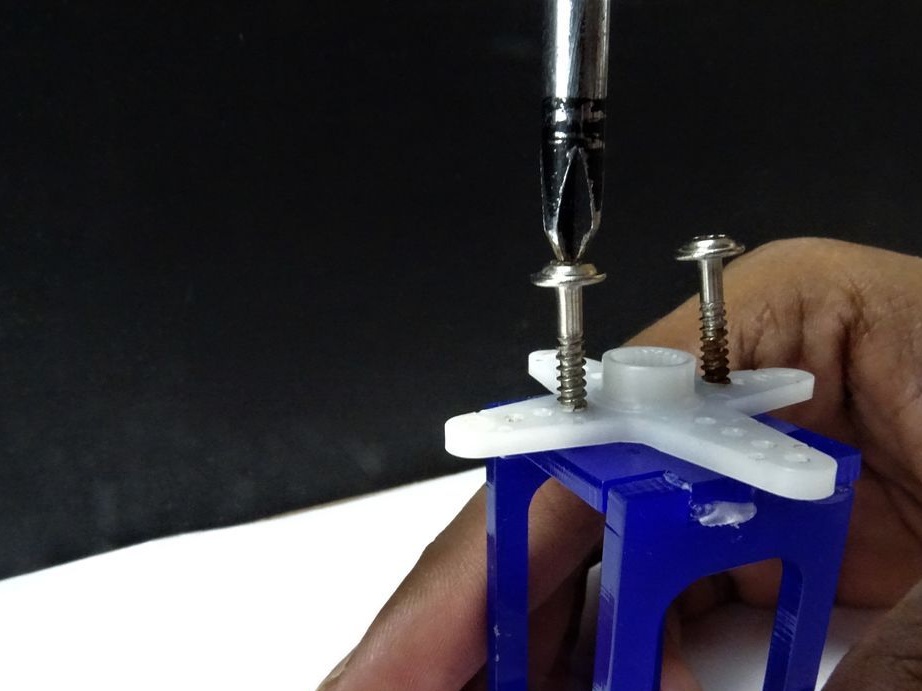
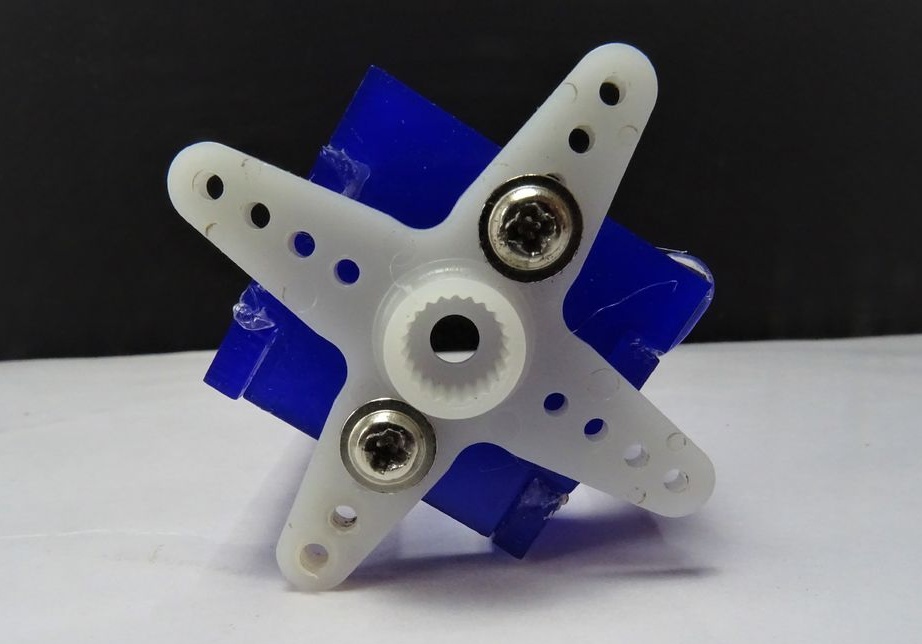
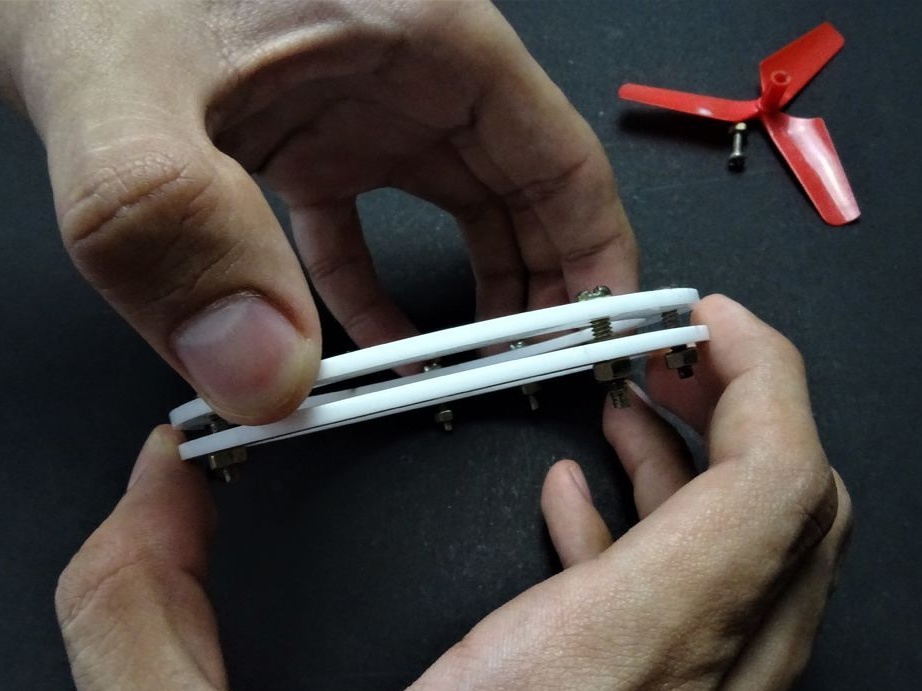
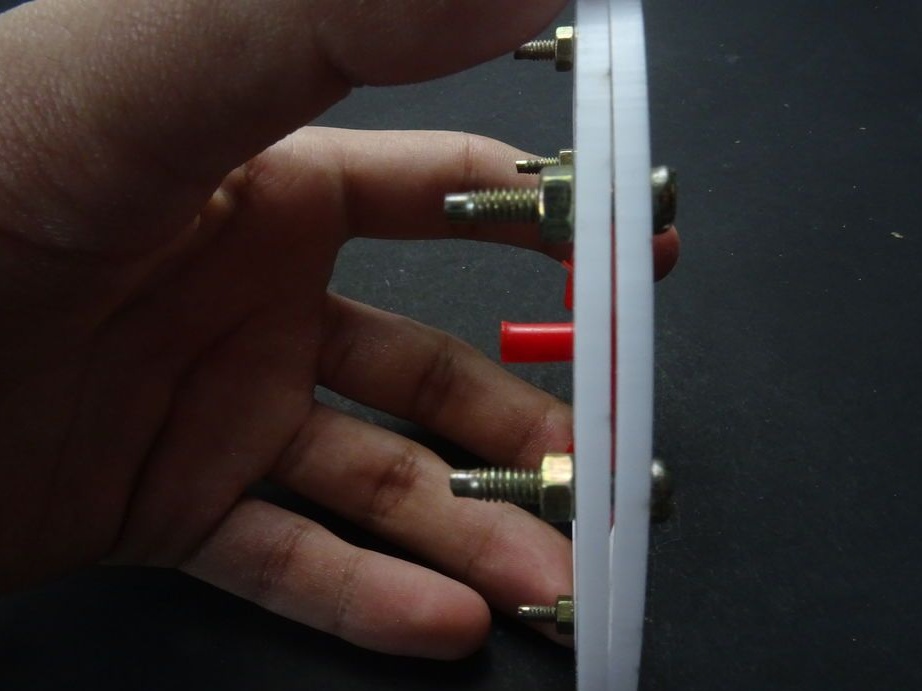
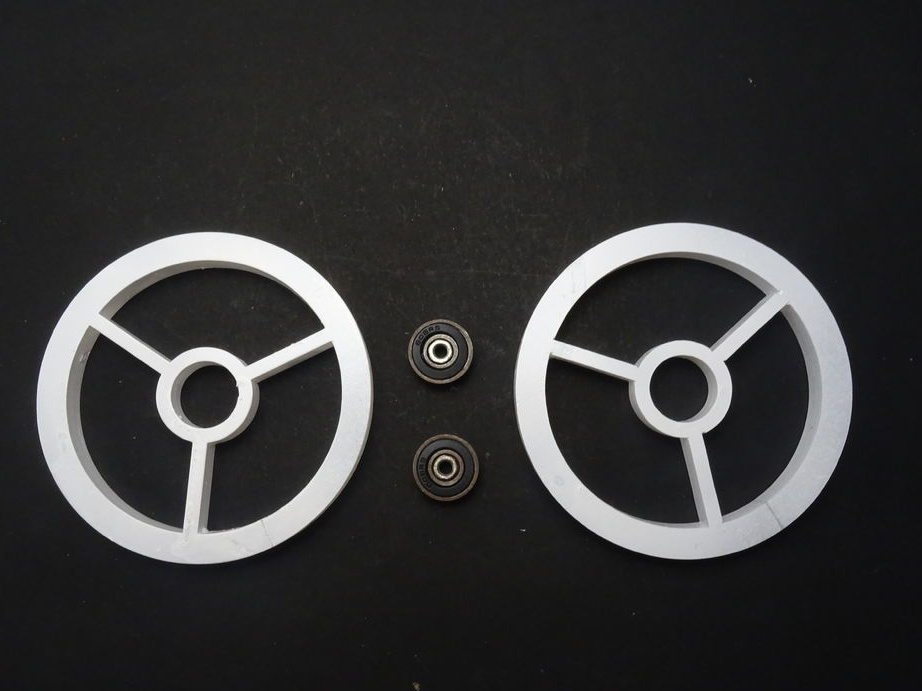
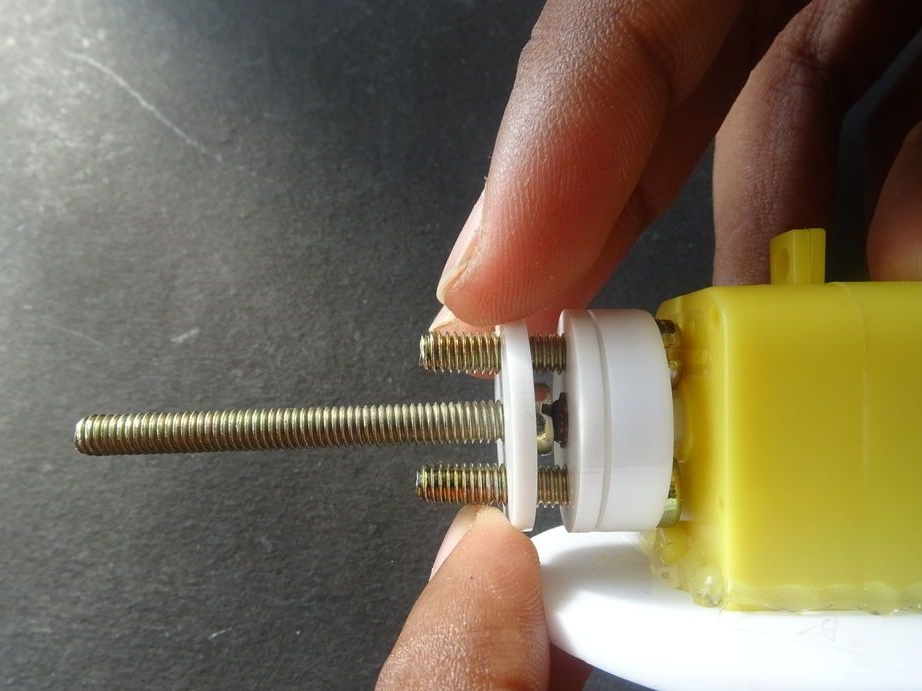
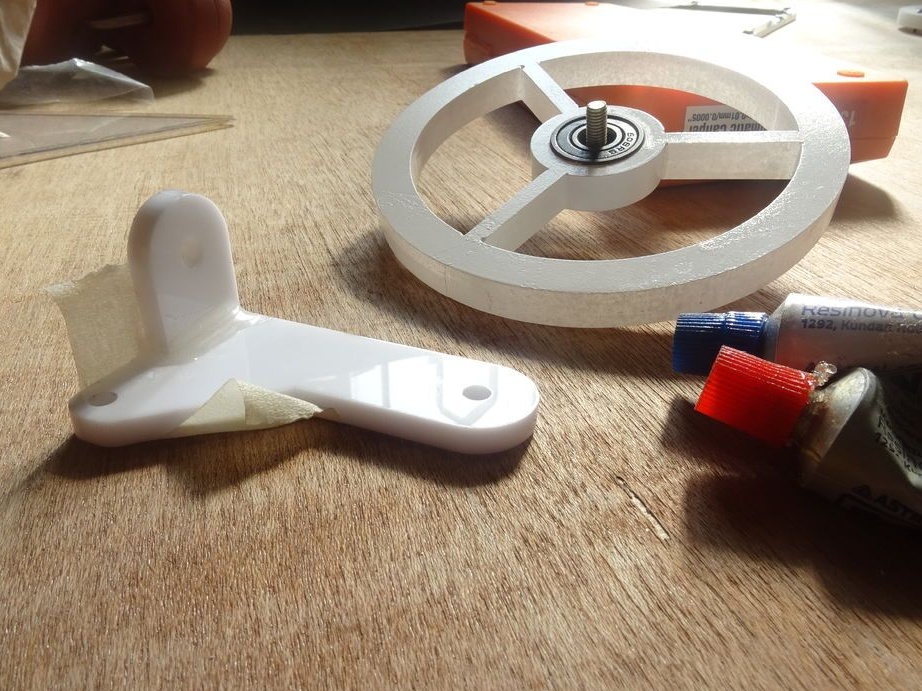
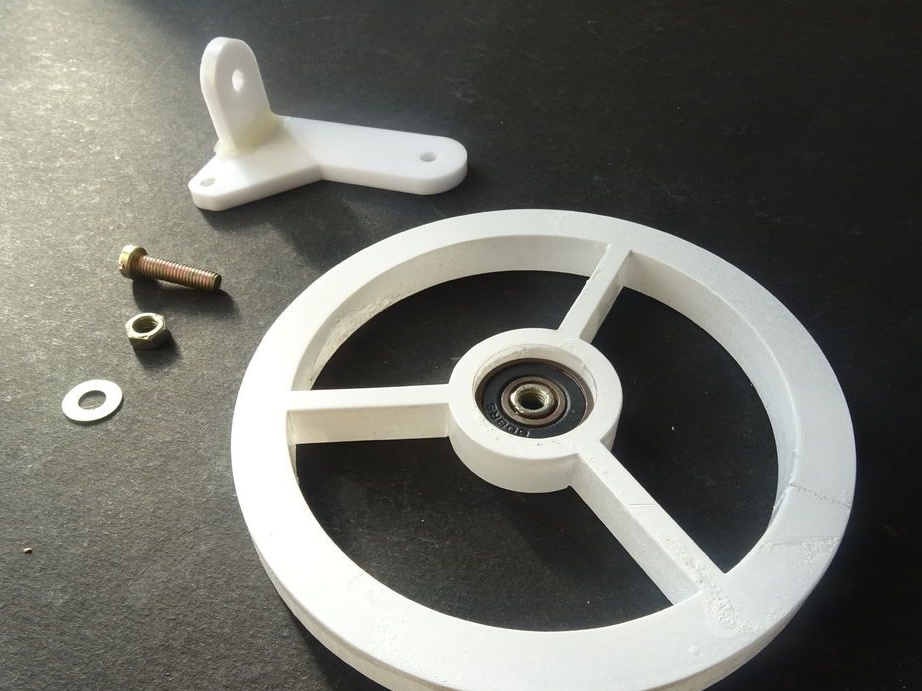
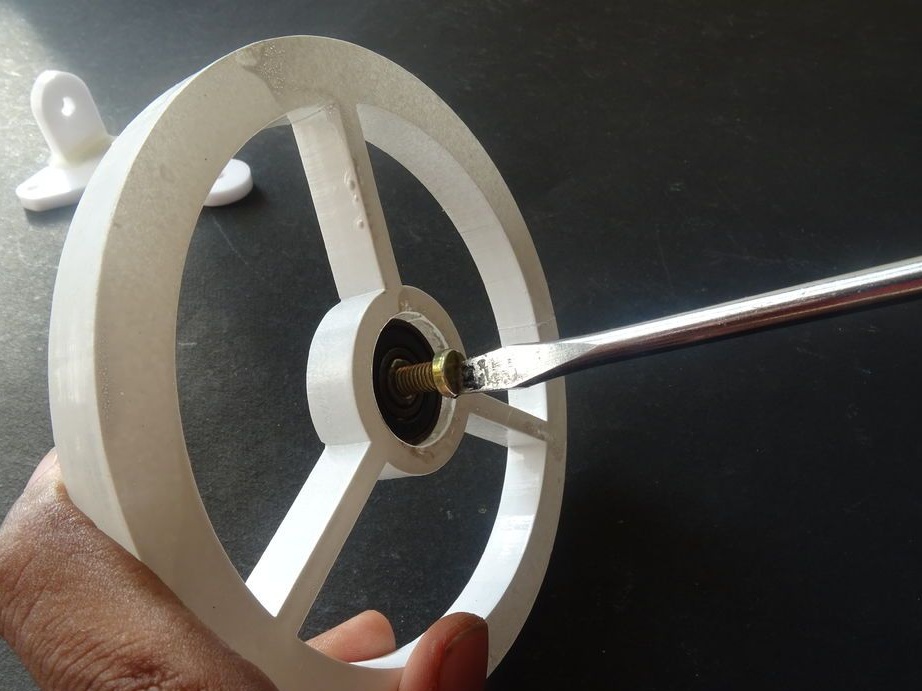
Pas onze: Muntatge de rodes
Sobre cargols recull dues llandes. Els cargols no estan completament ajustats.




Entre els discos s’instal·len cargols i s’aprimen els cargols. En instal·lar el cargol, heu d'utilitzar la plantilla per centrar-la.
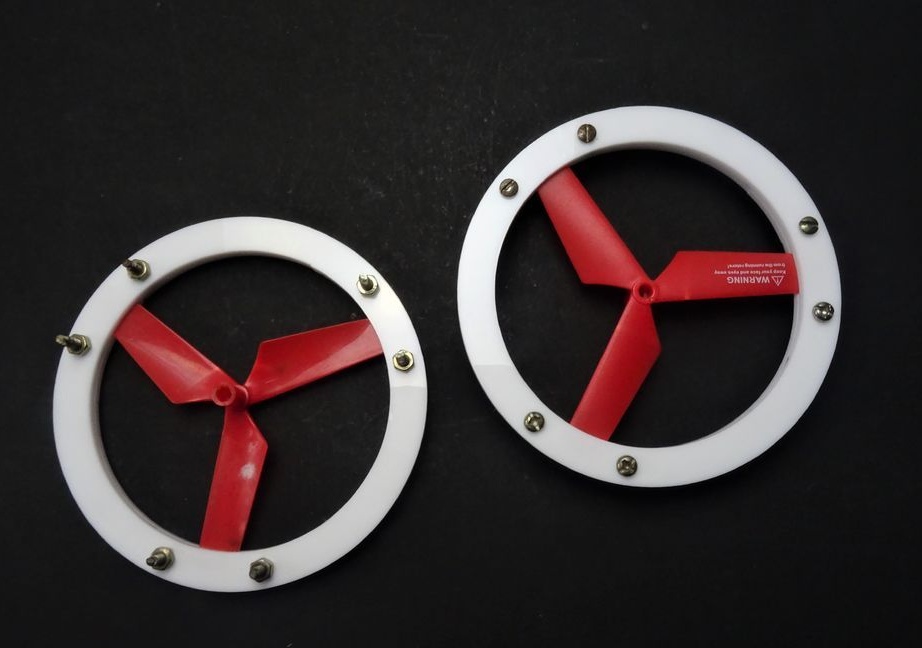
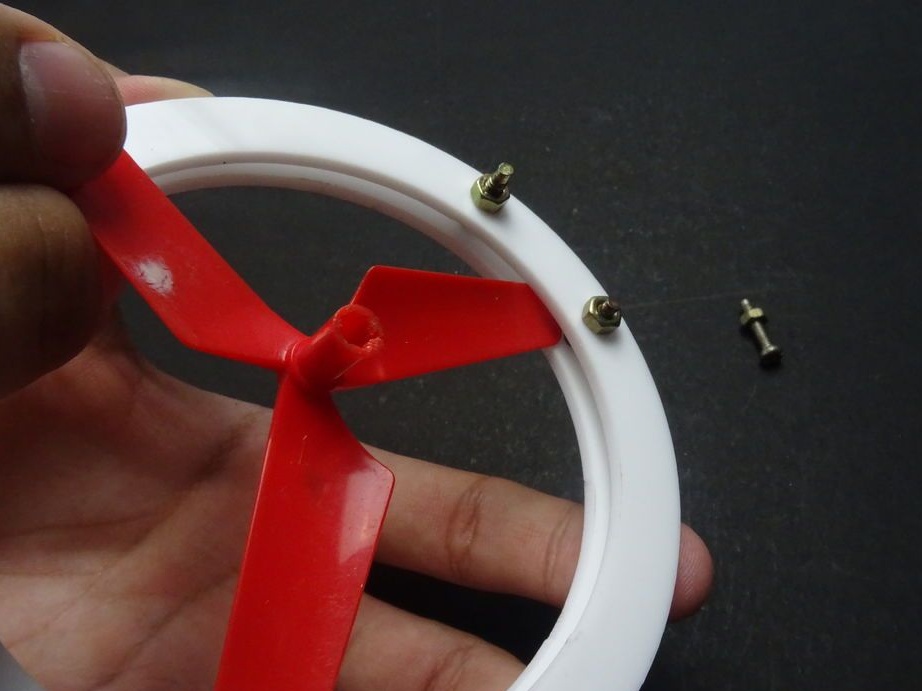
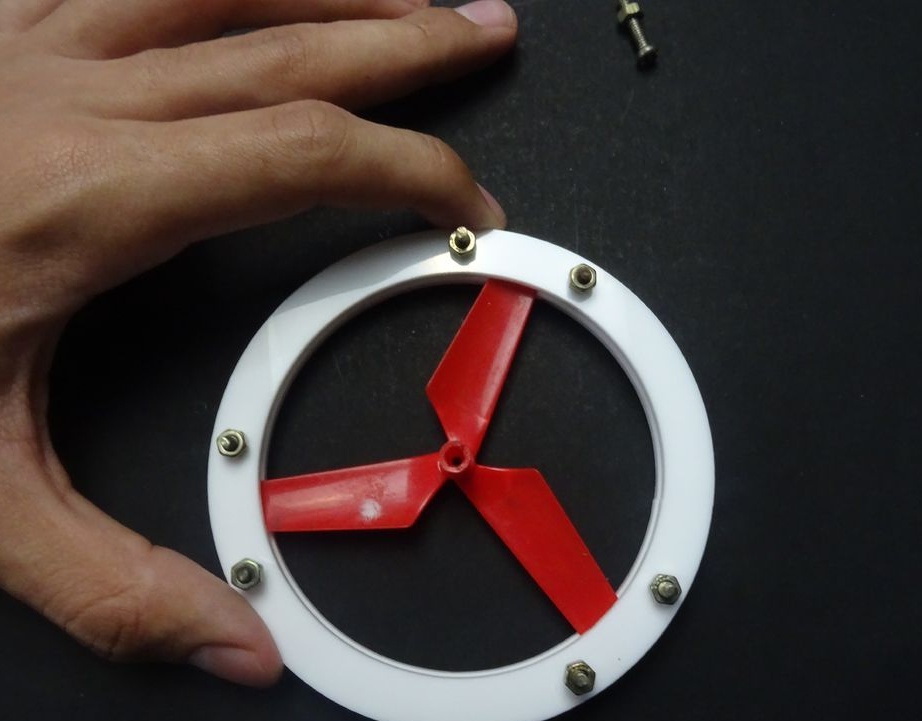

Configura el cantell exterior de la roda. La llanta ha de quedar enrasada amb el disc intern.
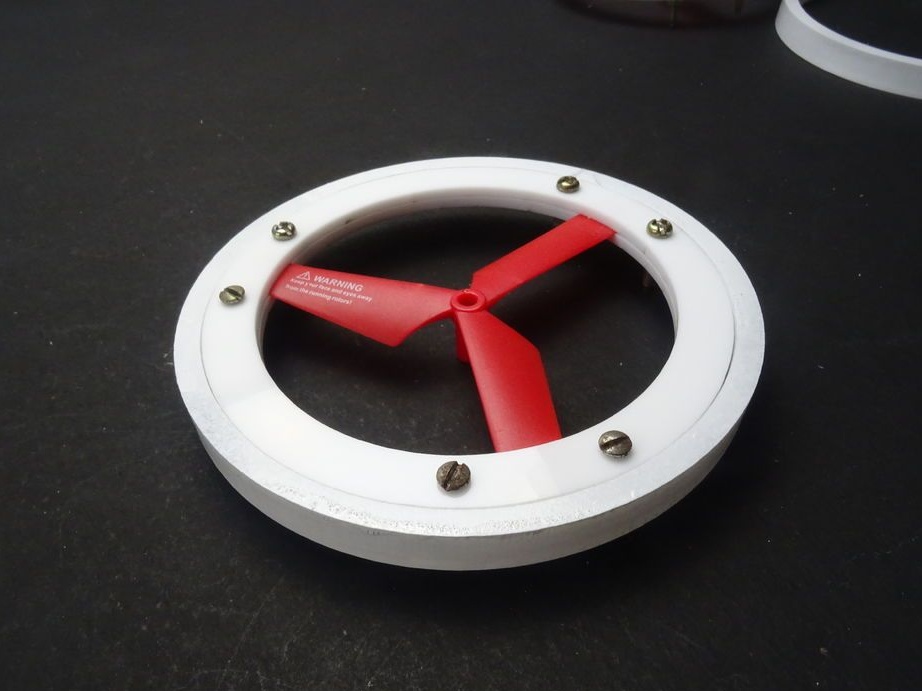

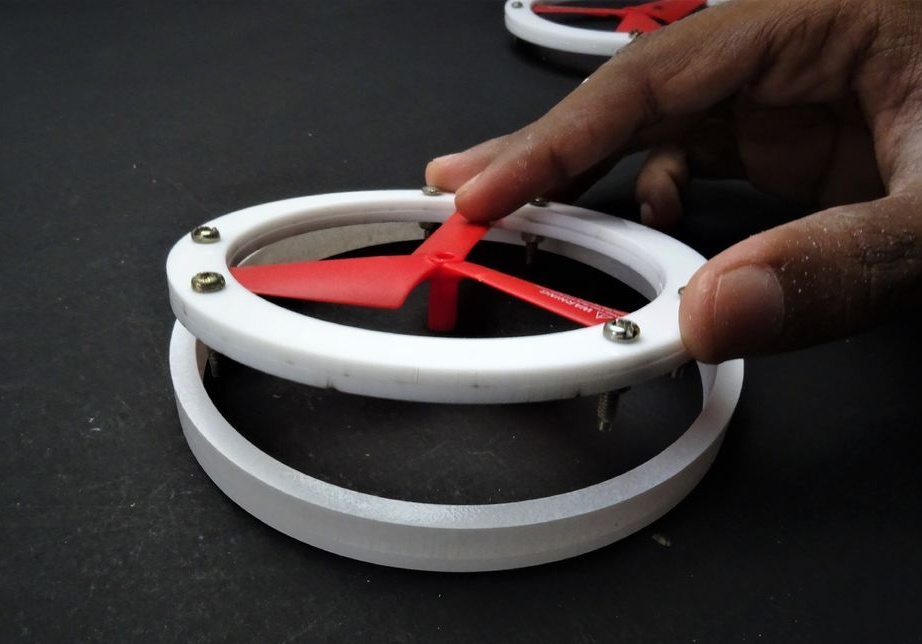

Aplicar cola calenta a l’articulació.


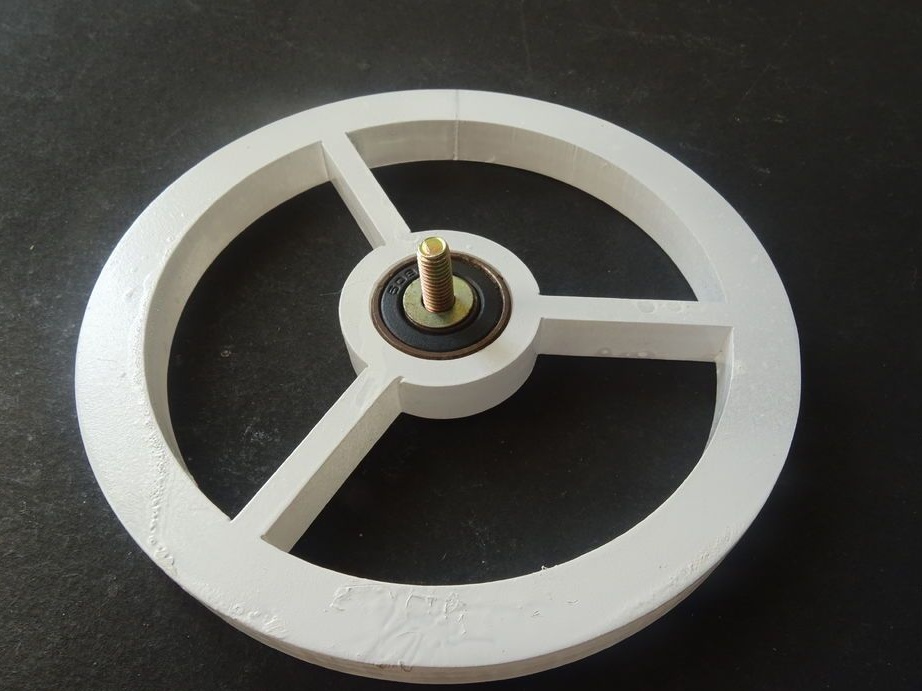
Ara recull les rodes davanteres.
Una femella d’una mida adequada s’enfonsa a la cursa interior del coixinet. Pressa els coixinets a les rodes davanteres.



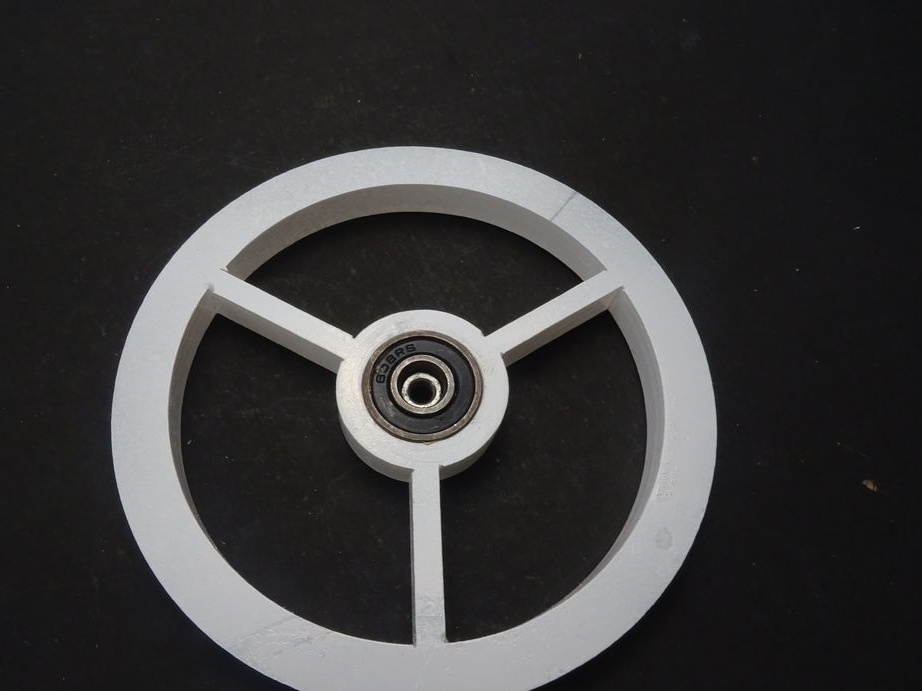
Les rodes estan a punt.

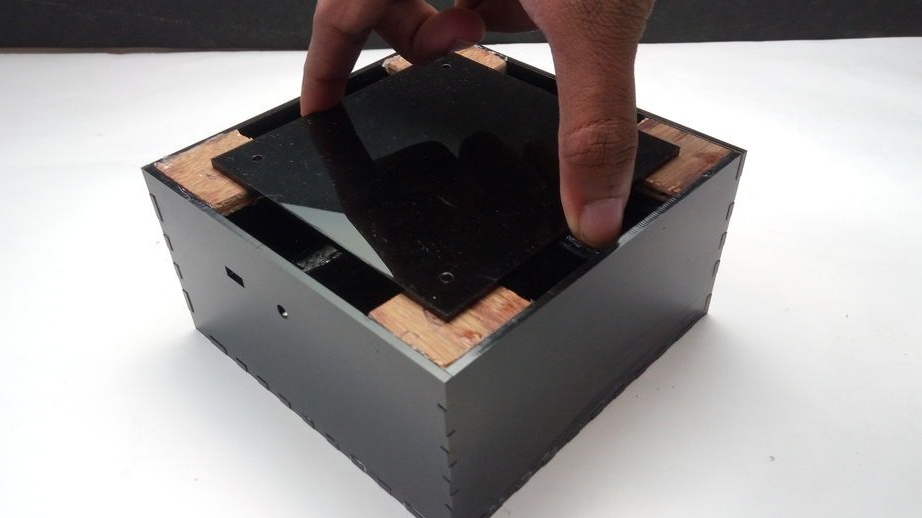
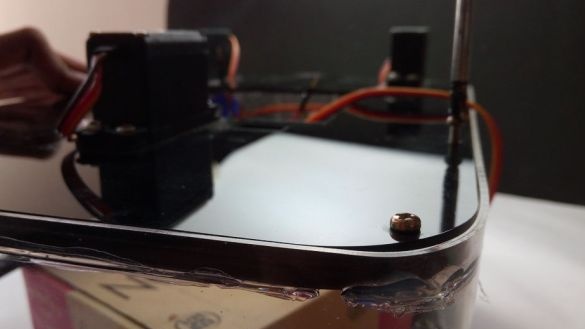
Pas dotze: Recinte electrònic
Enganxa la carcassa de l’electrònica.
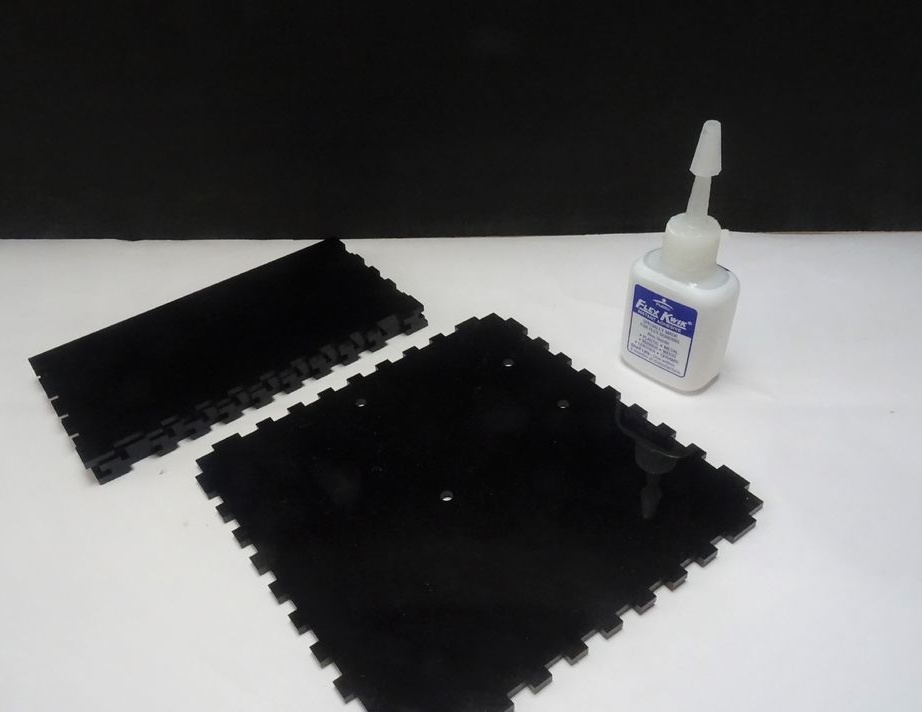
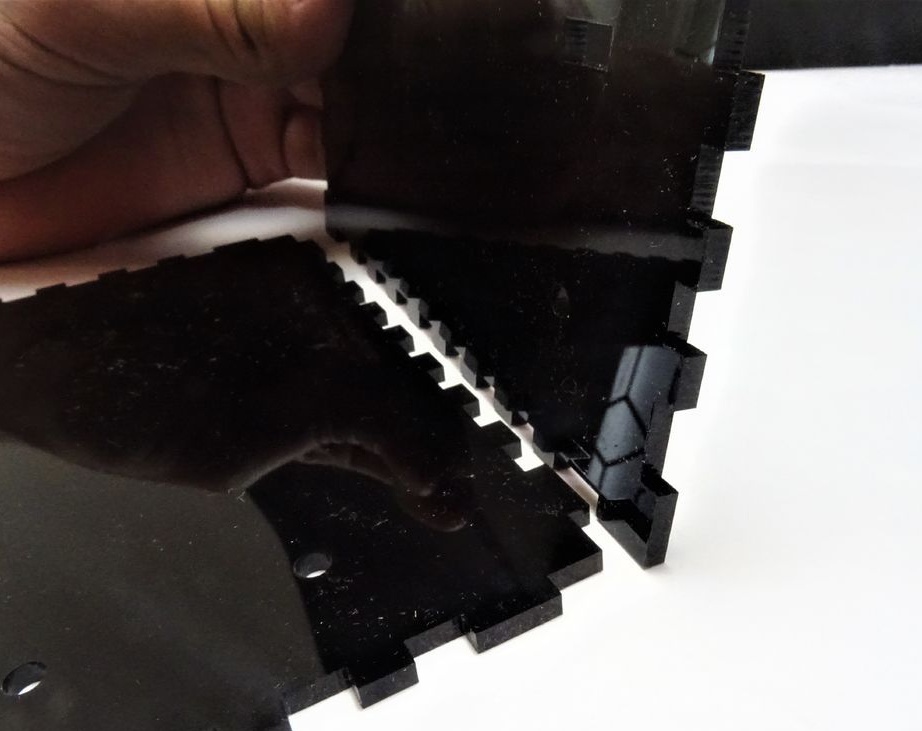

Aquesta caixa contindrà tot electrònica els components, la qual cosa significa que s’ha d’impermeabilitzar al màxim.


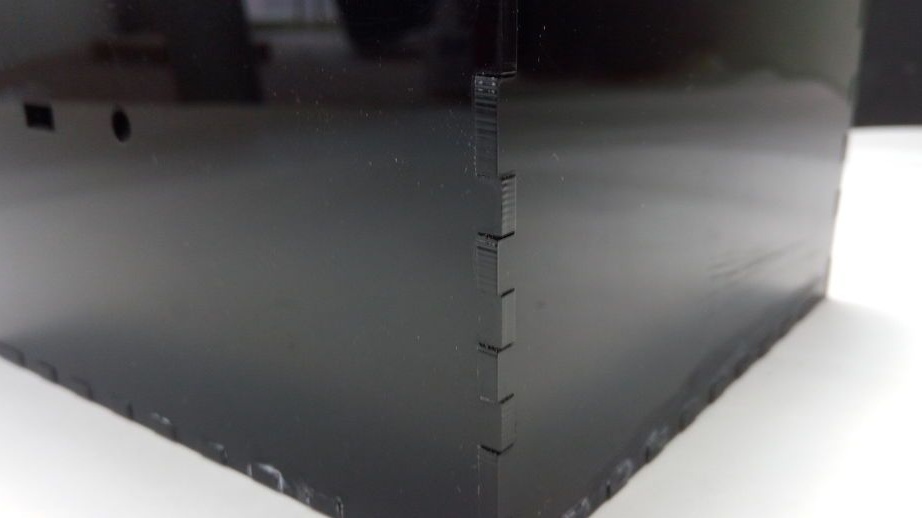
Es tallen quatre quadrats i s’enganxen del tauler a les cantonades de la caixa. S’adjuntarà la tapa de la caixa.



Pas tretze: Muntatge de rodes
Ara necessiteu connectar les rodes i l’engranatge amb un embragatge.





Cargola les rodes del davant per traure.


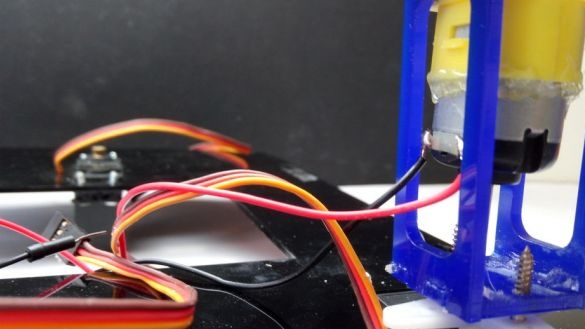
Pas Catorze: Connecta l'electrònica
Segons l’esquema, instal·la peces elèctriques.
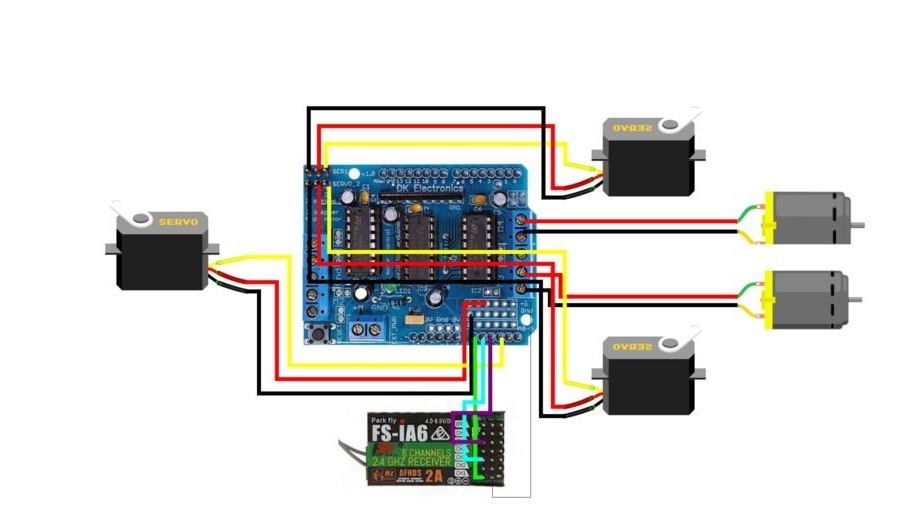

Els cables del motor esquerre a M1, a la dreta a M2. Connecta un controlador de motor. Connecta servos. Instal·la el receptor: gnd del receptor a Gnd Arduino; Receptor de +5 V a +5 V Arduino; pin 3 a A0; pin 1 a A1; passador 5 a A2. Connecta la bateria.
Quinze pas: descarregar el codi
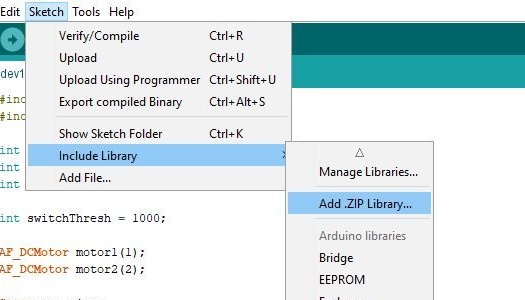
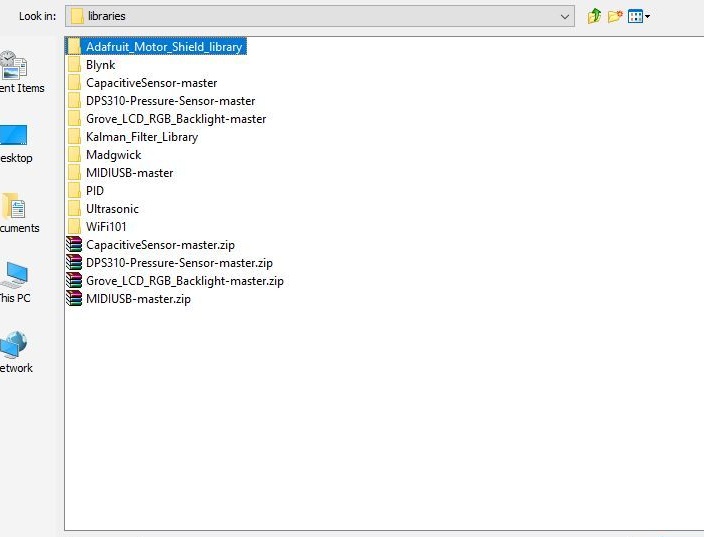
Primer cal descarregar la biblioteca.
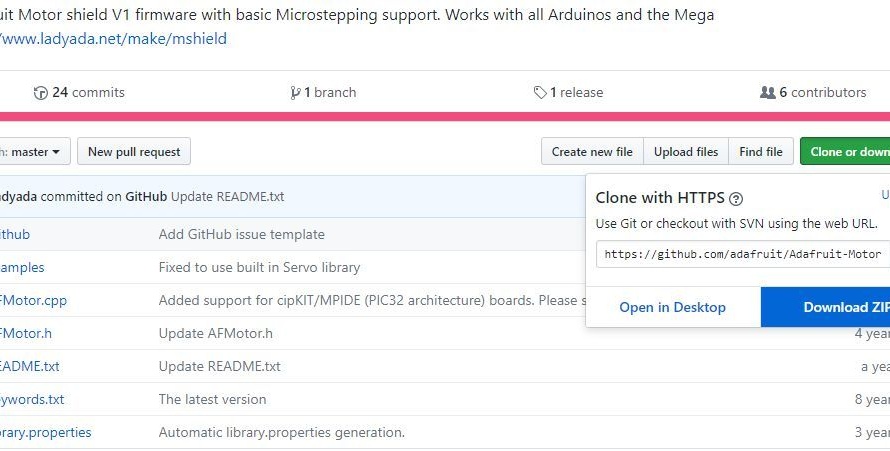
A continuació, descarregueu el codi. Quan es carrega, la bateria s'ha de desconnectar.
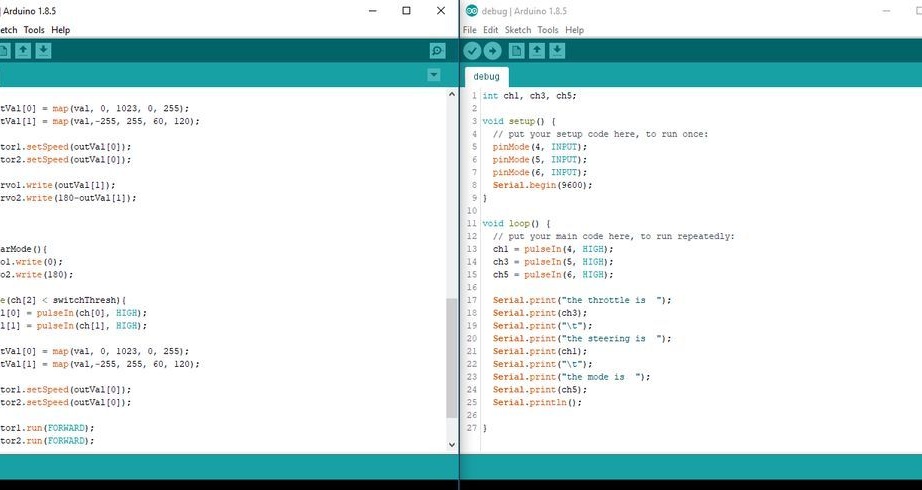
Descarregueu el codi següent.
amphibious_rover_code.ino
Després de descarregar el codi, comprova el funcionament de motors i accionaments.
Setzè pas: muntatge
Ara és hora de muntar el vehicle tot terreny.
[centre[/ centre]
Instal·la servidors. Instal·la motors d’engranatges.

Fixa les rodes. Torna les dues meitats del cos.






Tot està a punt i ara ja podeu provar.