


Però primer, esbrinem què és i per què es necessita. De fet, el seu nom ens diu el seu propòsit. Es forma a partir del mot llatí curvus, que significa corbat o ondulat. És a dir, un curvímetre és un mesurador de distància de rodes o rodets. Es distingeixen dos tipus de curvímetres: petit (cartogràfic), que s’utilitzen generalment per a mesures en el mapa, i gran (de carretera), que s’utilitzen normalment per mesurar la longitud dels trams corbats de les carreteres ja elevades. Es poden utilitzar en qualsevol lloc incòmode o impossible de mesurar amb ruleta estàndard, per tant, el projecte promet ser interessant.
El primer que cal tenir cura a l’hora de construir el curvímetre és una roda o corró. Ha de ser prou petit perquè la precisió de l’instrument sigui alta, alhora que ha de ser prou gran perquè el valor de les lectures no es vegi afectat molt pel desnivell de la superfície mesurada. En el meu cas, la roda té un diàmetre de 14 centímetres.

Ara cal determinar el material i la mida de l’estructura. Vaig fer servir un arbre.

A les barres vaig fer un marcatge i vaig fer els talls i forats necessaris.

A continuació, vaig muntar les peces mecanitzades amb petits cargols auto-punxants.
Ara ens apartem una mica del propi curvímetre i pensem en com aquesta cosa fins i tot pot determinar la distància? Tot és bastant senzill. Només cal calcular el nombre de revolucions de la roda i multiplicar-ne per la longitud de la seva circumferència exterior, i és encara més fàcil afegir un valor de longitud cada vegada que la roda faci una altra revolució.
Per comptar cada revolució en el cas més senzill, podeu utilitzar el "contacte lliscant". Tot i això, no recomano utilitzar aquest mecanisme de referència. És molt millor utilitzar un interruptor de canya o un sensor Hall.
És hora de provar sobre una roda. Ho subjectaré amb un cargol llarg. Trobem un lloc al marc on la llanta està més a prop possible i marquem amb cops. Al voltant d’aquesta zona, hem d’instal·lar l’interruptor de canya.

Al volant cal instal·lar un petit imant.Assegureu-vos que la seva força serà suficient per tancar els contactes del commutador de canya.
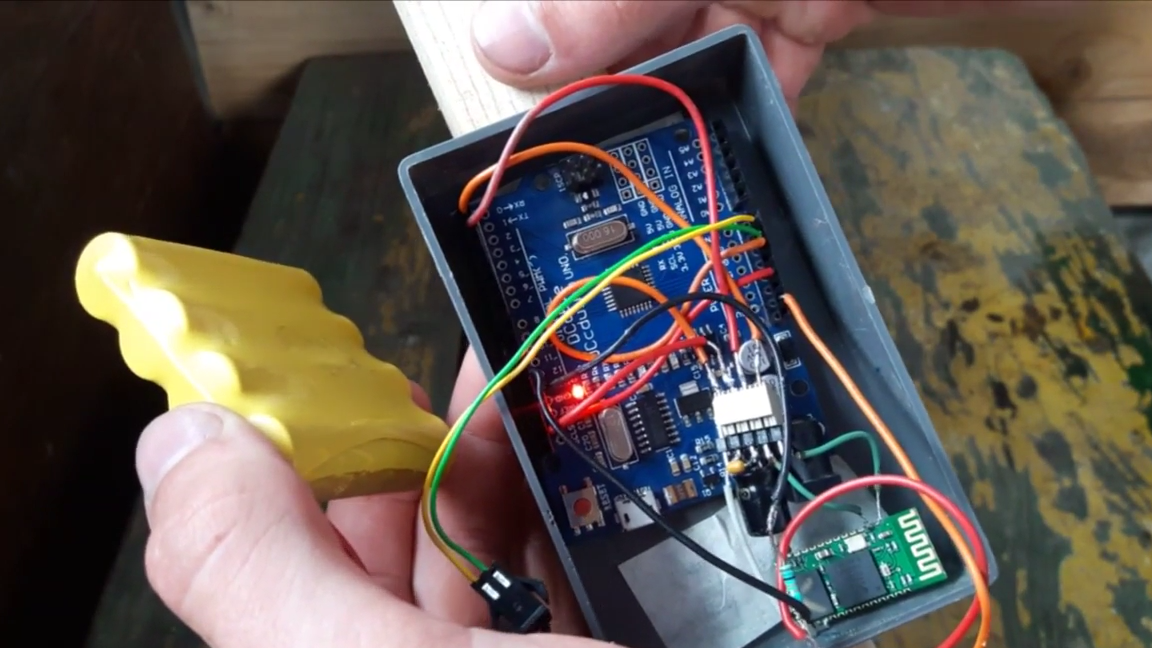
Ara ens dedicarem a "cervells" del sistema. En el meu cas, es tracta d’una tarifa Arduino UNO. Llegirà l'estat de l'interruptor de canya i transmetrà les dades mitjançant connexió Bluetooth, mitjançant el mòdul HC-05, al telèfon. Per cert, el commutador de canya està connectat a la placa com un botó normal. Crec que no hauria d’haver cap problema per connectar el mòdul Bluetooth.
Pel que fa al codi en si, és molt senzill. I vaig intentar comentar-ho perquè tot fos el més clar possible.
int gercon = 12; // va connectar el commutador de canya a 12 pins
doble distància = 0; // va crear una variable doble per emmagatzemar la distància
void setup () {
Serial.begin (9600); // va connectar una connexió en sèrie
}
void loop () {
/ * A continuació es presenta el bucle if. Si el botó de canya està tancat, es farà el següent càlcul de distància. El valor 0.46472 ja és la longitud calculada d’una revolució de la roda. Per evitar dades "addicionals", afegeix un retard de 200 mil·lisegons i mostra les lectures
* /
if (digitalRead (gercon) == HIGH)
{
distància = distància + 0,46472;
retard (200);
Serial.println (distància);
}
} 
Aquí teniu el nostre curvímetre i a punt!
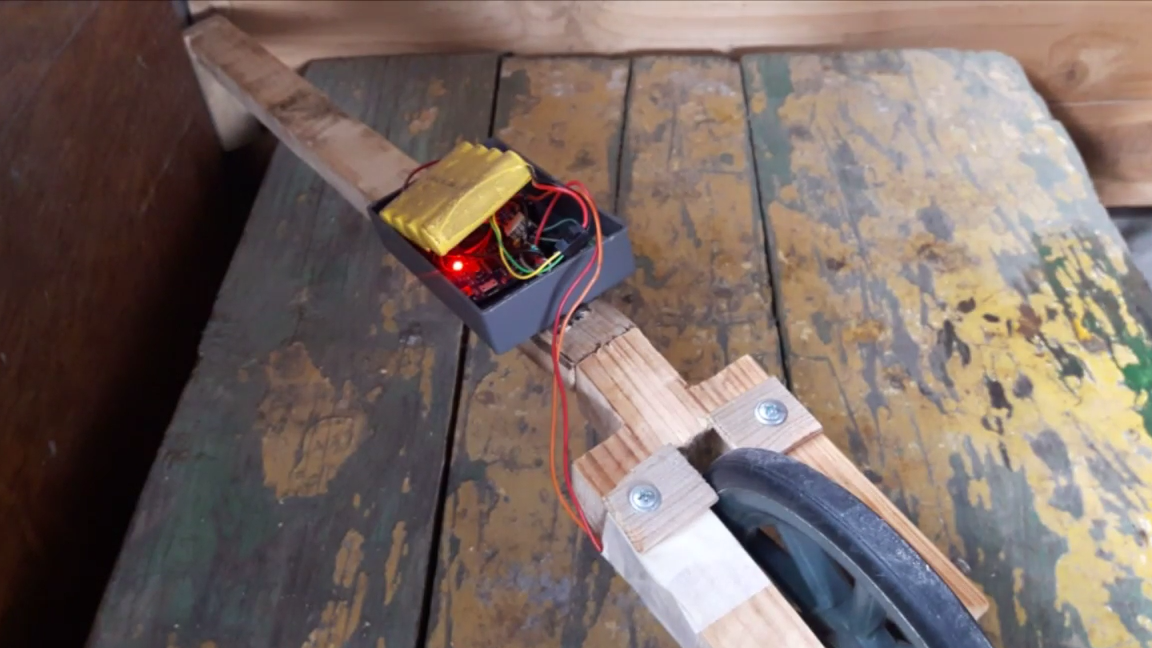
Fem un parell de proves de proves. Tot funciona genial!

Podeu veure un vídeo al muntatge d’aquest dispositiu, potser hi trobareu alguna cosa interessant.
[media = https: //youtu.be/kx_7ztPsLws]
Bona repetició del projecte!