


Materials i eines per al muntatge:
- regulador rotatiu;
- intel Edison amb Arduino Taula de separació
- Controlador PWM I2C;
- interrupció del rellotge en temps real;
- mini O2C OLED;
- dos servos;
- Tres servos amb engranatges metàl·lics;
- dos cables per a un servoaccionament de 30 cm de longitud;
- soca de muntatge per endoll;
- commutador de dues posicions;
- pinzell i pasta de dents;
- font d'alimentació per a 5V 3A;
- una xeringa de plàstic;
- femelles i cargols;
- rosca i varilla roscada;
- una peça d’acrílic transparent de 61 cm x 61 cm x 3 mm;
- contraplacat de 91 cm x 61 cm x 6 mm;
- Impressora 3D.
Procés de muntatge del robot:
Primer pas. Part mecànica
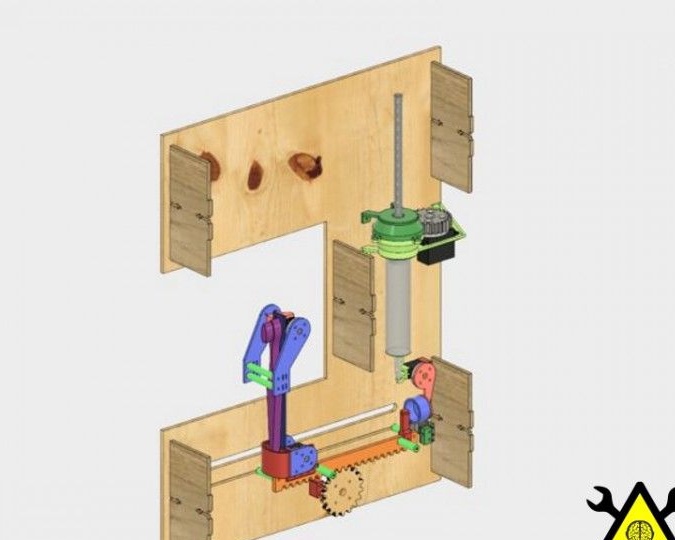
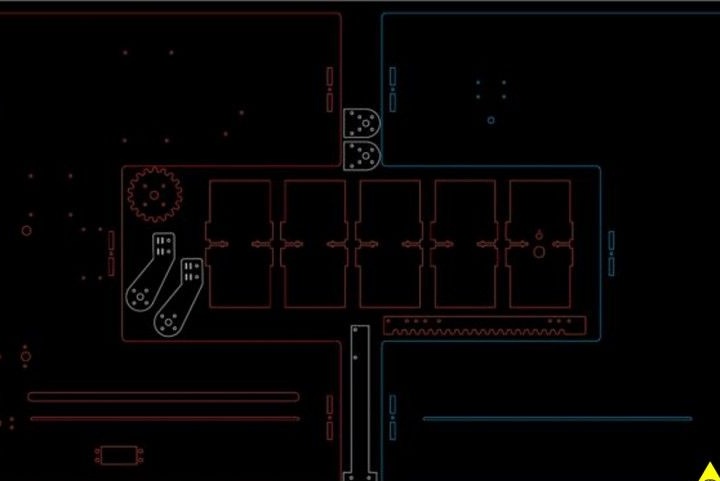
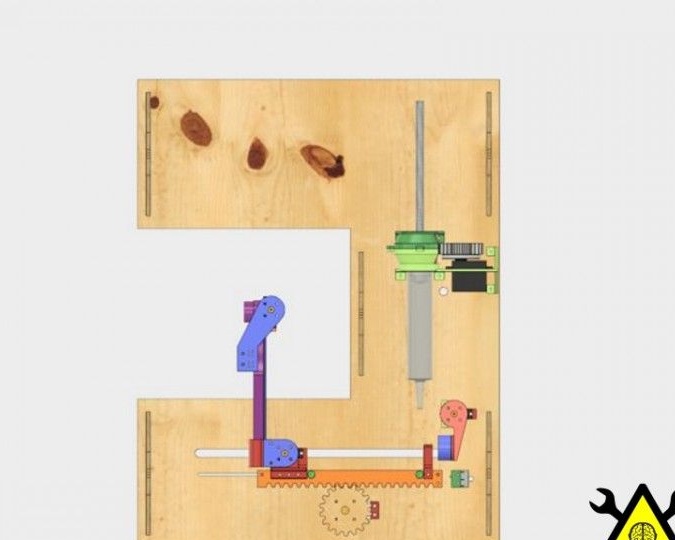
El primer dispositiu es va modelar mitjançant una combinació de Fusion 360 i Illustrator. En el procés, es va crear tota una tecnologia, que inclou la impressió 3D, així com el tall per làser de metall. En total, el sistema es pot dividir en quatre nodes principals. Inclou un transport, un suport per a raspalls de dents, un cos principal i un dispensador.
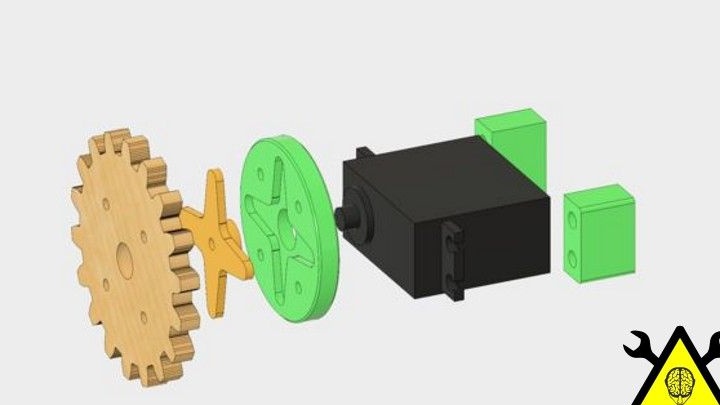
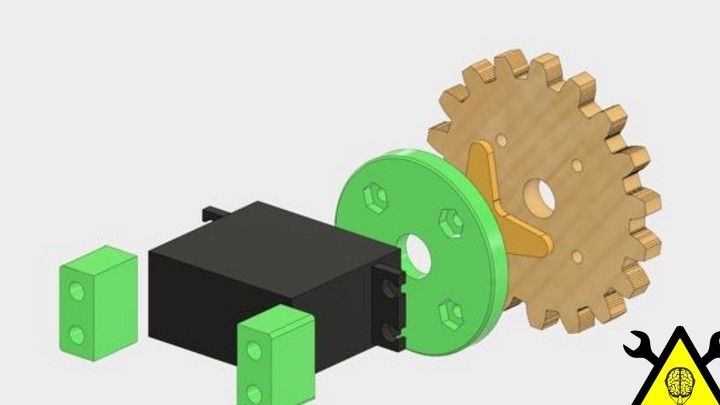
Per tal que els productes casolans s’utilitzessin per a necessitats més àmplies, es va decidir modelar adaptadors d’estàndards i micro-servos. Aquests adaptadors disposen de ranures per fixar eixos estàndards, així com espai per a quatre rosques a la part posterior. Degut al fet que els adaptadors van ser dissenyats per a eixos, s’han d’acoblar a les plaques o a altres objectes.

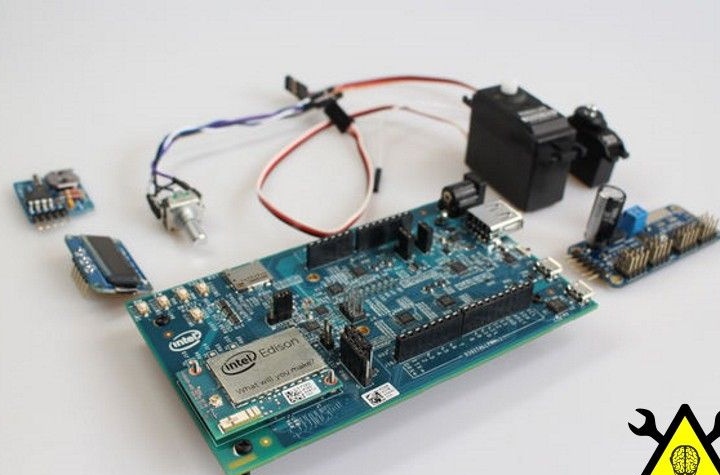
Pas Segon El circuit elèctric del dispositiu
S’utilitza una font de 5V i 3A com a potència. Això és suficient per alimentar un motor. Pel que fa a la placa principal, consumeix uns 500 mA, i les accions del motor, el LED original i el rellotge en temps real consumeixen una petita quantitat de corrent.
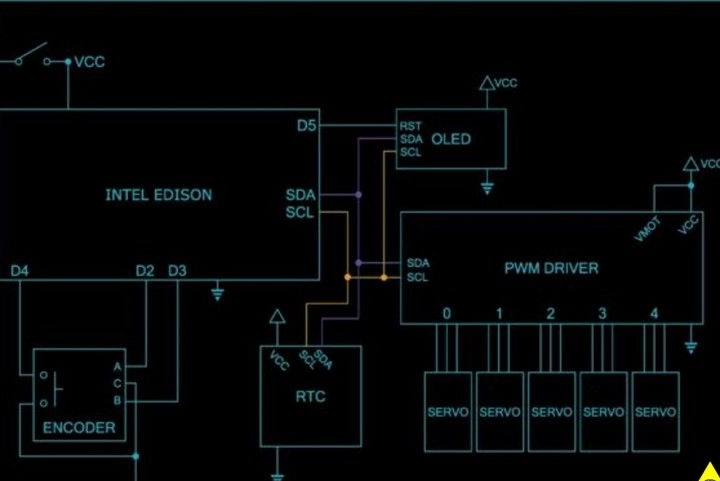
El processador Intel Edison s’utilitza com a controlador principal del sistema. A causa de la separació de les plaques, el processador es pot comunicar fàcilment amb altres components de l'electrònica. La placa es connecta al motor, rellotge i pantalla.
Per controlar els cinc servos, s’utilitza una placa PWM. La potència dels motors es pot controlar mitjançant una font externa, però l’autor va decidir lligar el Vmot al pin VCC.Gràcies a això, tot el sistema funciona amb 5V.
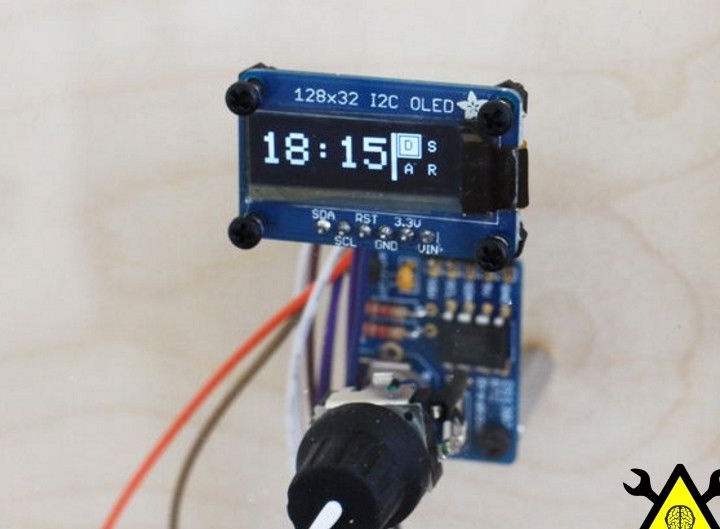
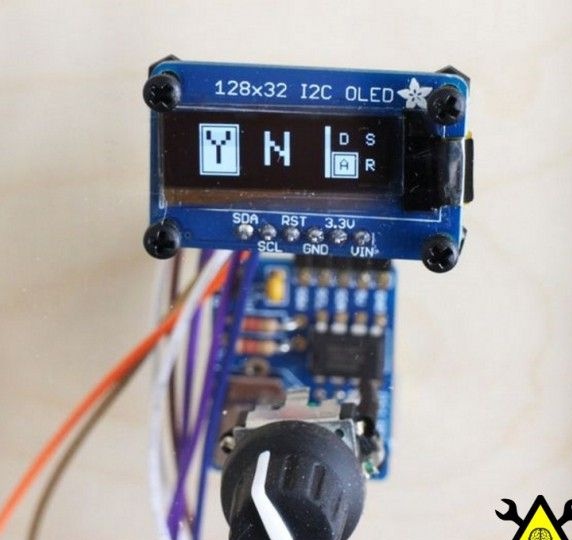
Perquè es pugui controlar el dispositiu, s’utilitza una petita pantalla de 128 x 32. Un sensor rotatiu actua com a entrada principal de l’usuari. Les sortides del sensor es connecten als contactes digitals del processador.
Tercer Pas Muntatge corporal
La part de darrere actua com a suport per a la caixa, està feta de contraplacat amb un gruix de 6 mm. S’utilitzen quatre cargols per assegurar el PWM i el processador. Edison es munta a la part frontal i PWM a la part posterior.
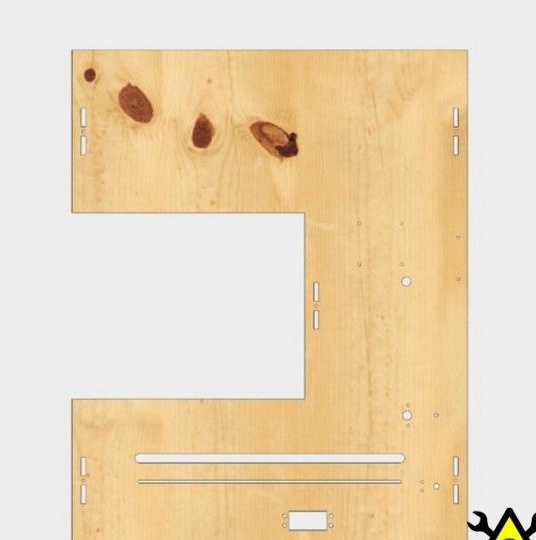
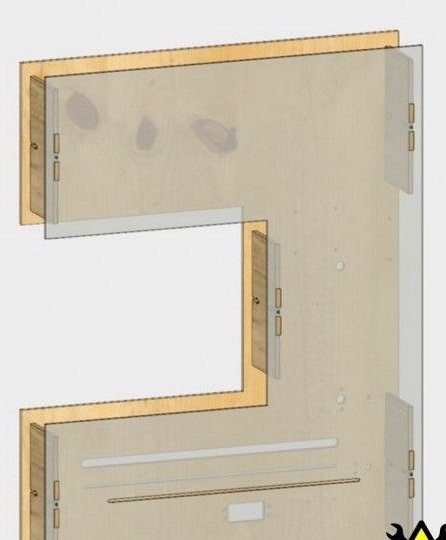
S’utilitzen cinc plaques separadores per connectar els panells frontals i posteriors. Els espaciadors s’uneixen a les plaques amb cargols i femelles adequades. Les plaques són gairebé simètriques, però les protuberàncies en un extrem són més curtes, no s’allarguen cap endavant. L’interruptor, juntament amb el connector d’alimentació, s’uneix al puntal inferior.

Pel que fa al panell frontal, es necessita principalment per tal de protegir el dispositiu durant el seu funcionament. Per assegurar la pantalla s’utilitzen quatre cargols, el sensor rotatiu també s’uneix amb femelles.
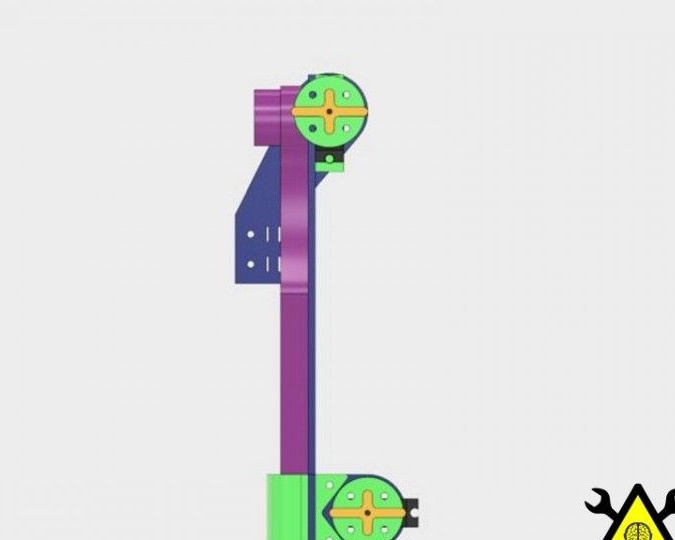
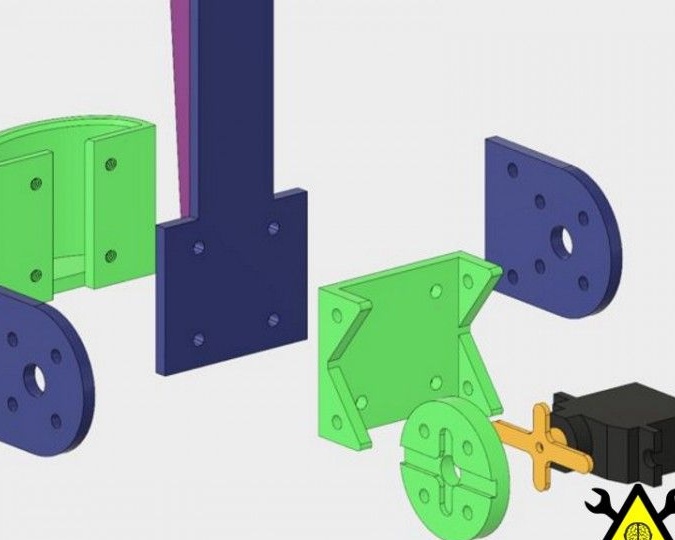
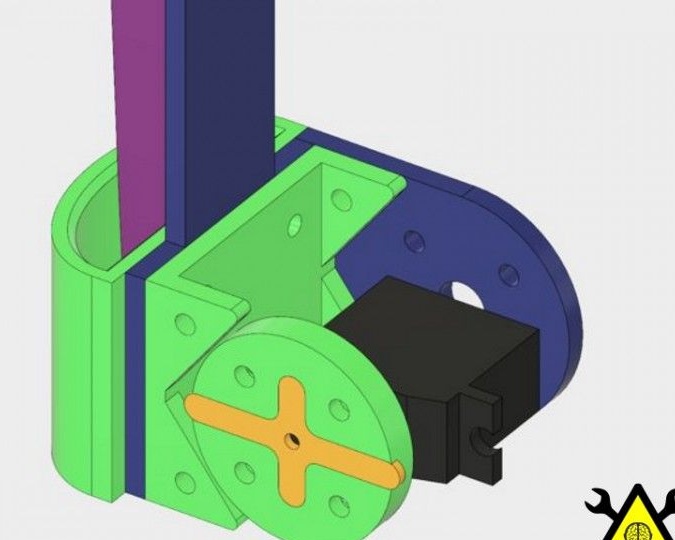
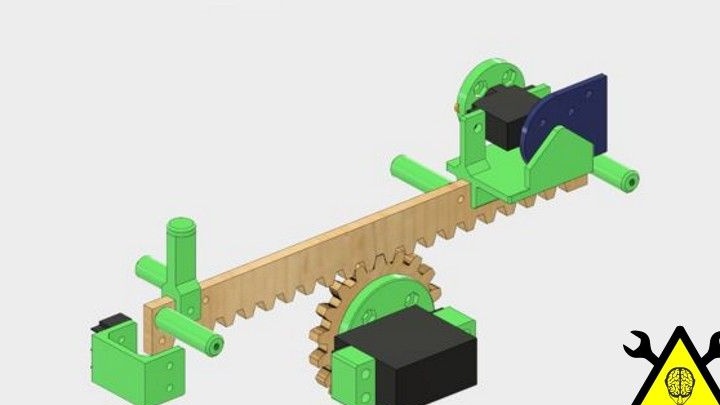
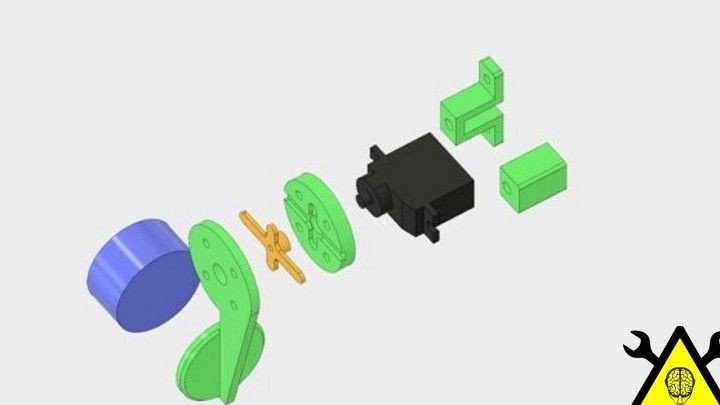
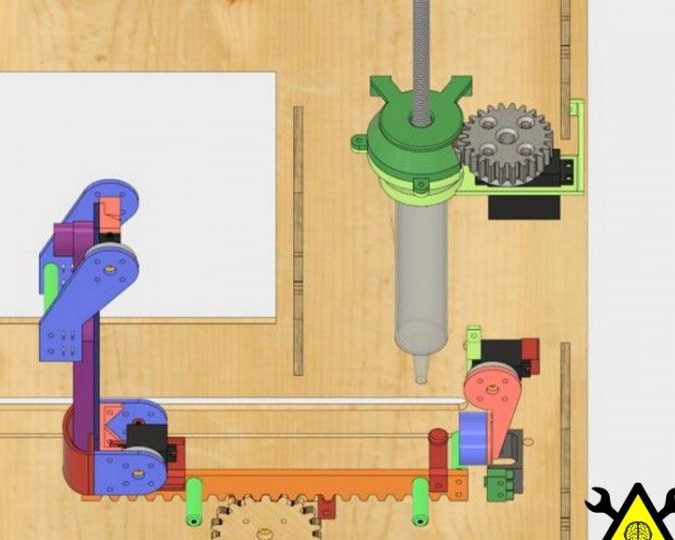
Quatre pas Suport raspall de dents
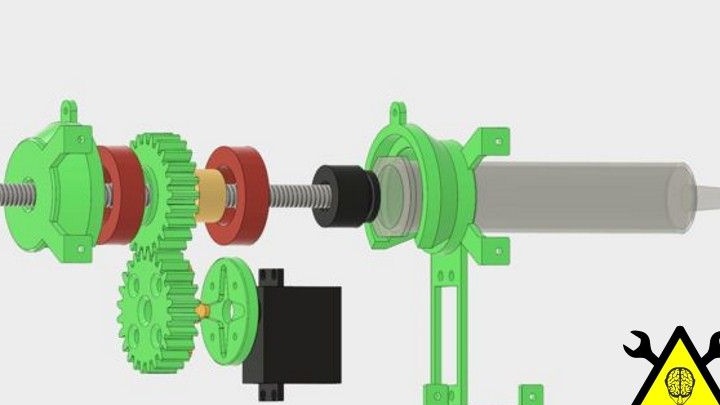
Hi ha dos servos al suport del raspall de dents, impulsats pels components: la base i el "cap". A la imatge podeu veure els elements de color blau i verd. El que es va tallar amb un tallador làser és de color blau i els elements impresos en una impressora 3D són de color verd.

Gràcies al cap, el raspall de dents no cau. Les mans són accionades per un únic servoaccionament, s’uneixen amb dues juntes juntes. Per a fixar el servomotor a la placa principal s’utilitza un adaptador 3D i dos cargols. A la placa hi ha quatre ranures, a través d’elles amb l’ajut de bandes de goma negres s’hi enganxa un raspall de dents.
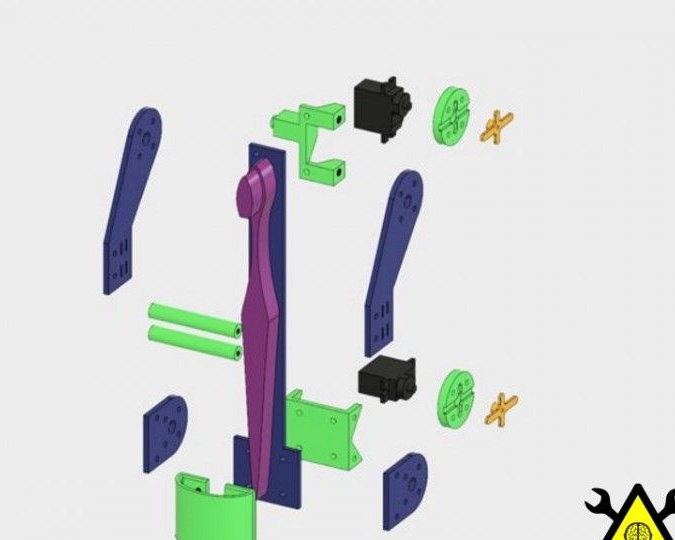
La base és una petita copa 3D, evita que el raspall caigui. Després de carregar el raspall de dents al conjunt, el servoaccionador el manté i es deixa caure. S'utilitzen vuit cargols per connectar les plaques.


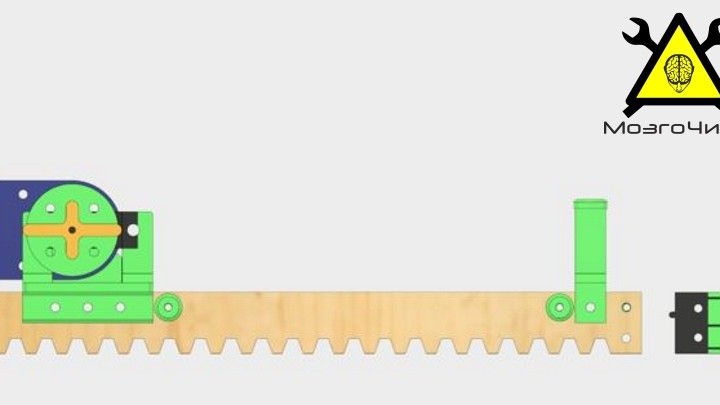
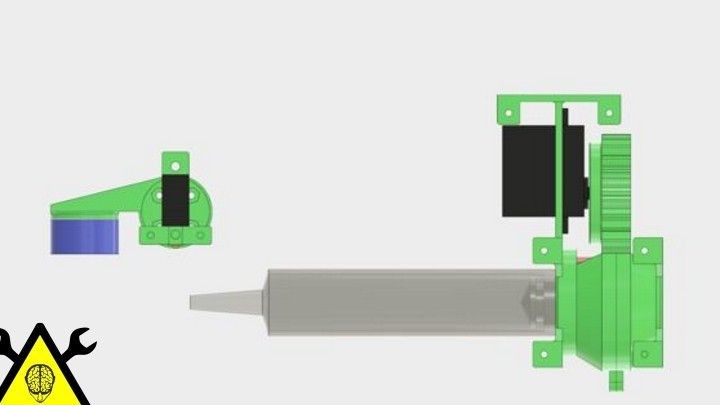
Cinquè pas Muntatge ferroviari
El bastidor consta de tres parts úniques, es tracta d'un reposacaps, carruatge i cordons. Amb el carro, es fixa el porta-bastidor. El carro en si està unit amb tres cargols. El reposacaps és necessari per tal de reduir la càrrega del portaevento principal, es munta més al carro del bastidor.
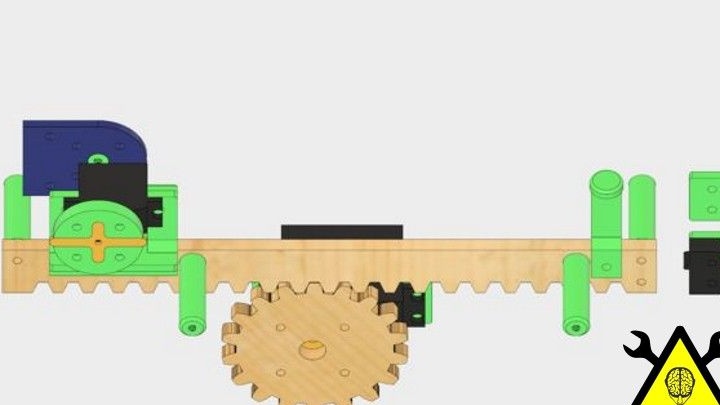
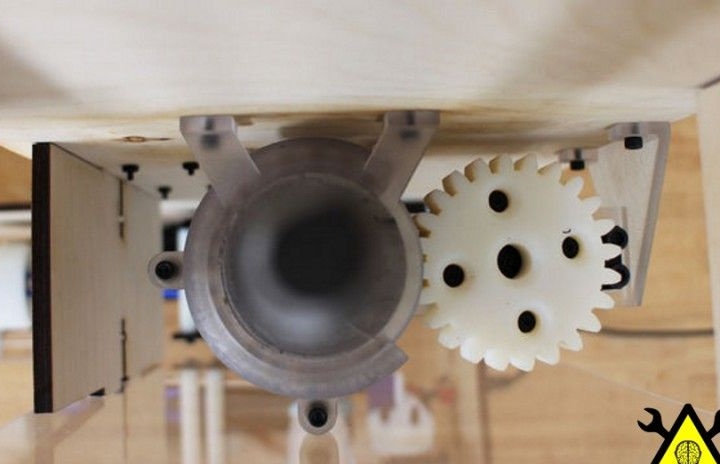
L’engranatge està muntat per sota del bastidor. Es talla de fusta contraplacada de 6 mm de gruix i s'uneix a un eix servo estàndard. El servoaccionador en si es troba lleugerament compensat de la placa base, en relació amb això hi ha unes puntes rectangulars idèntiques. El servomotor propi es fixa a la base amb quatre cargols.
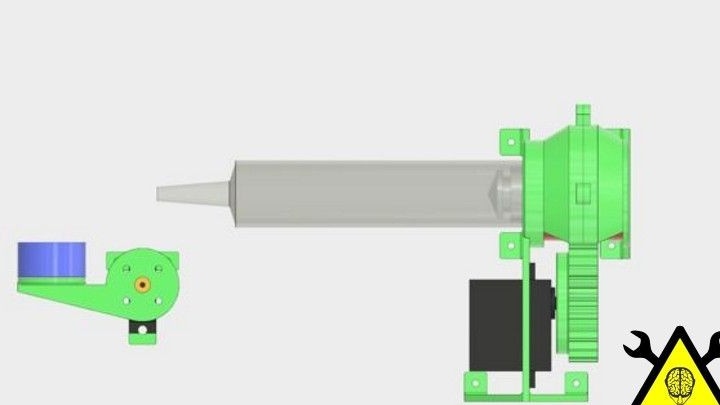
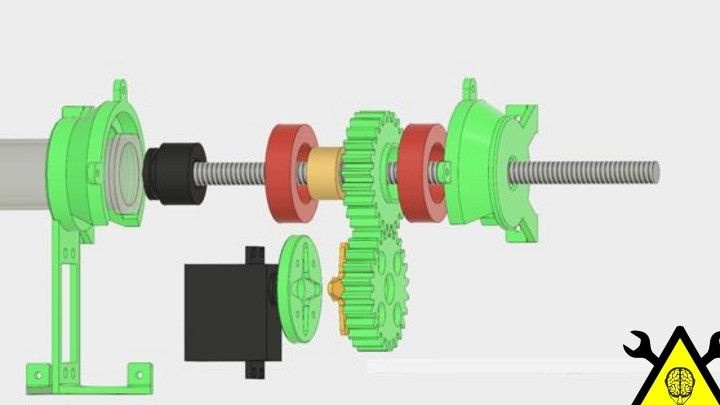
Pas sisè Muntatge del distribuïdor
El mecanisme més complex del dispositiu és una unitat lineal. Gràcies a ell, es produeix la dosificació de la pasta. El nucli del dispositiu és una vareta roscada i una femella, amb aquest ajut, el tub es comprimeix. S’utilitzen sis cargols per assegurar l’accionament.
Setè pas. Programari
En total, el programa té tres funcions: configurar l’hora, configurar l’alarma i també la funció d’arrencar el dispositiu.
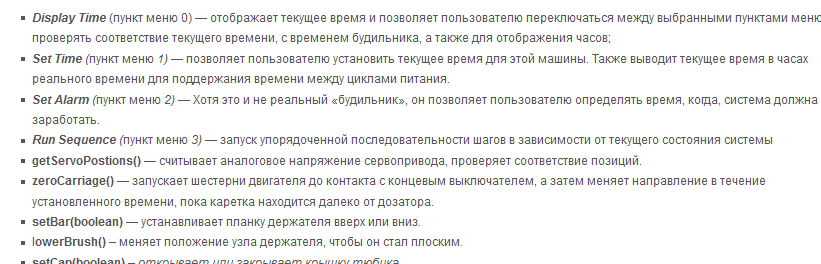
Tot això, després de parpellejar i configurar el dispositiu ja està a punt per al seu ús.