
Materials i eines:
- microcontrolador Arduino (en aquest casolans aplica Arduino Uno Rev 3);
- Dos servos de Parallax;
- joystick (també de Parallax);
- placa de circuit) petit);
- connectors per a connexió;
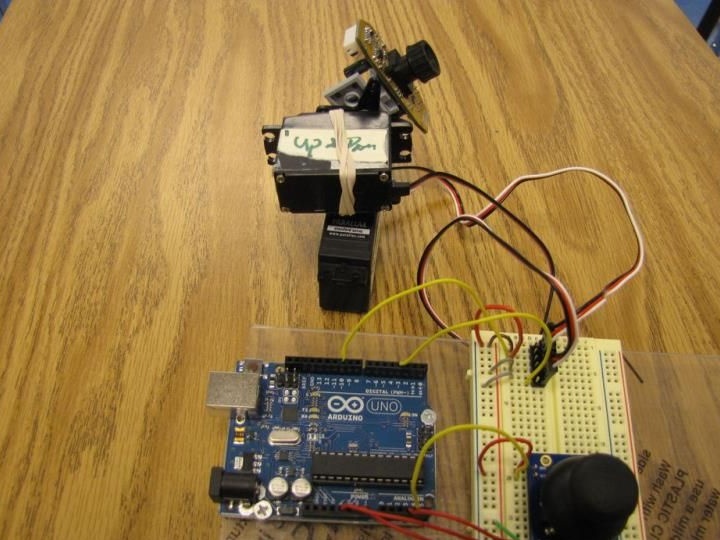
- Un dispositiu per al seguiment del moviment dels servomotors (s’utilitza una càmera web trencada i cubs lego).
Procés de muntatge casolà:
Primer pas. Connectem servomotors
El procés de muntatge casolà comença amb la connexió dels servomotors. Per muntar una disposició prèvia, s’utilitza una placa de circuit. Aleshores serà possible fer un escut separat. A la figura es pot veure com es connecta exactament tot.
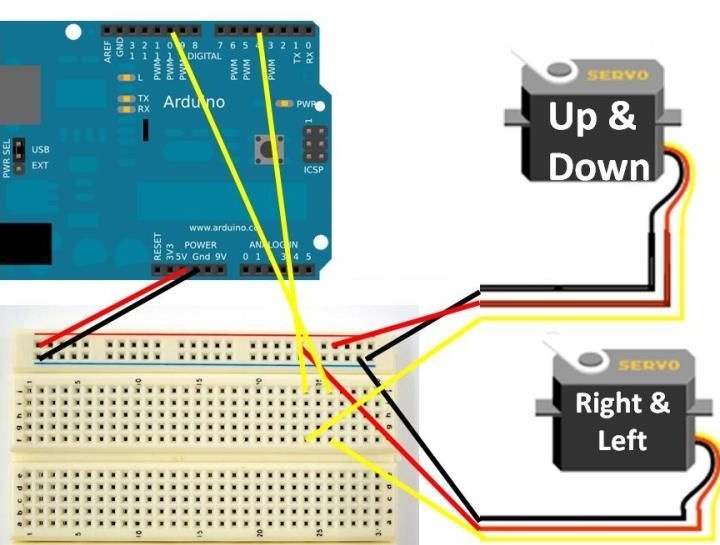
El cable vermell és l’alimentació, es connecta al pin 5V del controlador Arduino.
El fil negre és menys (terra), es connecta a la sortida Arduino anomenada GND.
El cable groc del servomotor Dret i esquerre s'ha de connectar al pin 11. En alguns models, pot ser blanc.
S'ha de connectar un cable similar amunt i avall de color groc al pin 4. També pot ser blanc en alguns models de motor.
És important recordar que els connectors de senyal utilitzats per controlar el motor provenen de les sortides PWM.
Pas Segon Connecteu el joystick
Com es connecta el joystick es pot veure a la imatge. Al principi, l’esquema pot semblar força complicat, però de fet no hi ha res complicat. Com passa amb els motors, aquí s’utilitza una placa de cablejat.
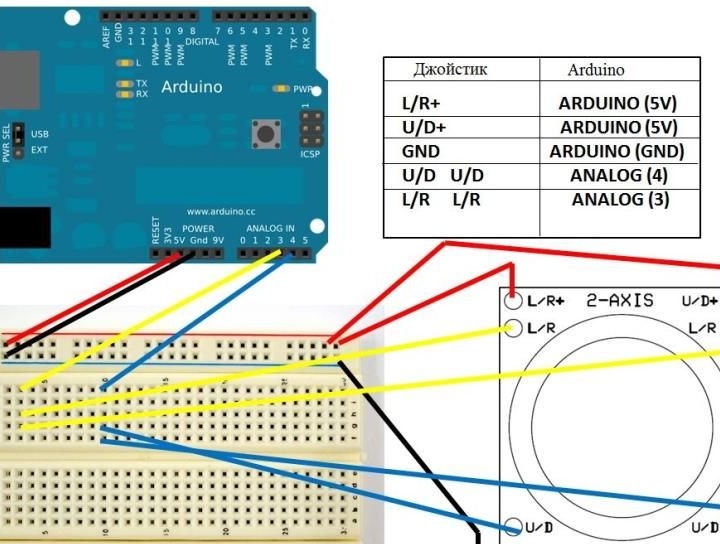
1. Al mòdul del joystick, podeu trobar les sortides U / R + i L / R +. Mitjançant aquestes sortides, es connecta energia. En conseqüència, haureu d'aplicar un voltatge de 5V del pin corresponent a l'Arduino.
2. També hi ha dos connectors sota el joystick anomenats L / R i dos connectors U / D. Han de connectar-se a les sortides analògiques A3 i A4.
3. En conclusió, la terra del joystick ha d'estar connectada a la terra de l'Arduino.
Després del muntatge, la connexió s'ha de comprovar dues vegades. És a causa dels errors de connexió que en la majoria dels casos es plantegen problemes. Això és especialment cert quan s’utilitza una placa de circuit i hi ha moltes connexions.
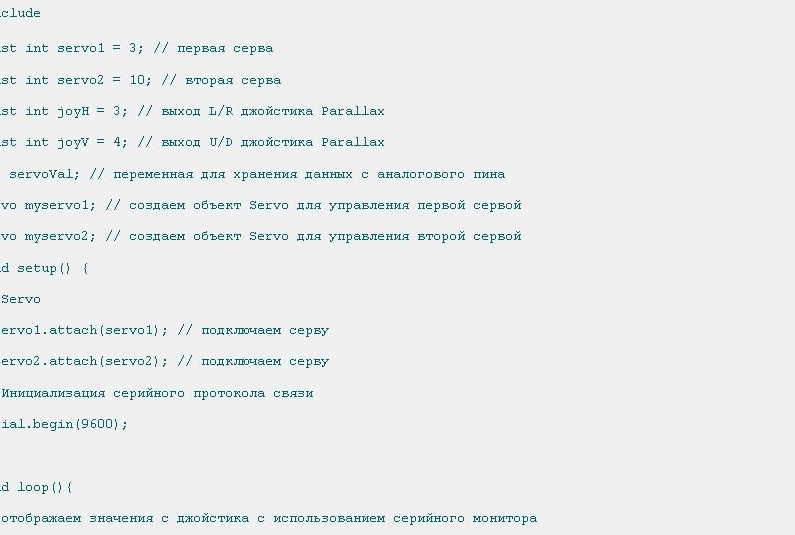
Tercer PasEsbós per Arduino
El codi és molt senzill i conté comentaris detallats. El codi anterior només ha de ser copiat a l’ID Arduino. Una vegada carregat el codi, els motors no s’han de moure. Només haurien de començar a moure's quan es prem el botó de la palanca de control.
Problemes que poden sorgir i com solucionar-los
1. Si els motors no s’encenen, comproveu dos cops la connexió. Les sortides PWM s'utilitzen per connectar motors, i les sortides analògiques s'utilitzen per connectar joysticks.
2. Es produeix que immediatament després de carregar el codi, els motors comencen a vibrar. Això passa si connecteu de forma incorrecta els pins U / D + L / R +. Cal comprovar la connexió amb cura. Per no cremar el tauler durant la prova, s’ha de desconnectar de l’ordinador.
3. Si es torna a comprovar tot, però els motors encara no volen funcionar, podeu intentar tornar a connectar el joystick. S'ha de treure de la placa de circuit i, després, instal·lar-la amb esforç. Els connectors del joystick haurien d’entrar bé en el disseny.
Si tot ha acabat, ja podeu començar a crear articles casolans amb control a través del joystick. Per exemple, podeu crear un robot que es pugui controlar amb un joystick, i molt més.