

El robot El bricolatge serà una gran joguina per a nens, també amb ell podreu jugar familiars o amics. L’essència del robot és la següent. És una caixa amb commutador. Tan aviat com algú fa clic al commutador a la caixa, comença a obrir-se una porta, de la qual surt la mà i torna a posar el commutador al seu estat original. Malgrat la senzillesa externa del robot, de fet, tot això sembla bastant divertit.
La base per crear un robot és un circuit Arduino. També hi ha alguns elements mecànics que es parlaran a continuació. Analitzem amb més detall com es pot fes-ho tu mateix muntar aquest robot.
Materials i eines per a la fabricació:
- Placa Arduino, qualsevol cosa amb sortides PWM;
- servomotors, dues peces (adequades el model Futaba - S3003, la potència d’un motor d’aquest tipus és suficient per obrir la porta, el dispositiu produeix fins a 3,2 kg / cm de potència);
- piles;
- commutador tipus SPST o SPTT;
- un commutador per controlar la potència de la bateria;
- necessiteu un botó per reiniciar Arduino;
- cables, saltadors i altres petites coses.

A més, necessitarà addicionalment una caixa de canvis (adequada per a cotxes amb radiocontrol), una placa per a un motor elèctric anomenat protector del motor Arduino, un servo servo RC. Aquests components són necessaris per fer que la caixa es mogui, com l’autor.
Per reduir el nivell de soroll durant el funcionament del dispositiu, cal un condensador electrolític amb un valor nominal de 10mF, una resistència de 10K i un inversor de 74HC04.
El procés de fabricació del robot:
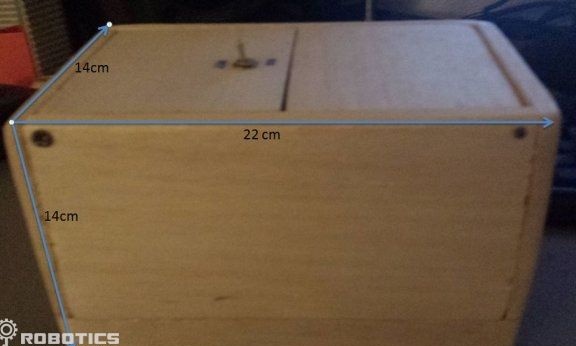
Primer pas. Com fer una caixa
Per crear una caixa, és a dir, un cos robot, cal trobar contraplacat o suro. A més, necessiteu una cola potent per enganxar la fusta. És important comprendre que com més pesi l’estructura, més energia es consumirà. Pel que fa a la mida de la caixa, és de 22cm x 14cm x 14cm.
Pas Segon Diagrama esquemàtic e parts
La part superior del robot inclou una placa principal Arduino, dos servos i un interruptor. Pel que fa al circuit, que és responsable de la quantitat de soroll, es pot substituir per una resistència ordinària.
Les unitats de servomotor s’alimenten a través del cinquè passador de la placa Arduino. Pel que fa als cables de senyal, es connecten als contactes 9 i 10. Gràcies a aquests contactes PWM, es controla l’angle de rotació dels servomotors. Aquest és un angle de 0 a 180 graus.
Per reiniciar Arduino es necessita el botó vermell.
A la part inferior del circuit hi ha la placa de blindatge del motor Arduino.Al tauler es poden veure dos canals, A i B, gràcies a ells, si es vol, es poden connectar dos motors alhora. La tasca principal d’aquest tauler és que amb ella podeu configurar programàticament la velocitat de rotació, la direcció, les pauses per a qualsevol canal dels motors. Si mireu el diagrama, s'utilitza el canal B, mentre que el contacte 13 determina la direcció, el contacte 11 és la velocitat i el contacte 8 s'utilitza per controlar els frens.
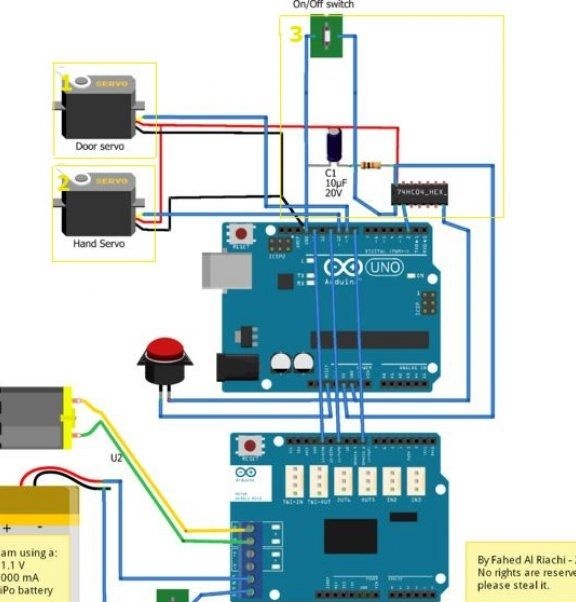
La font d’energia és una bateria d’11,1 / 1000 mA, es connecta a la placa d’escut del motor Arduino. Si no s’utilitzarà, la bateria està directament connectada a la placa principal.
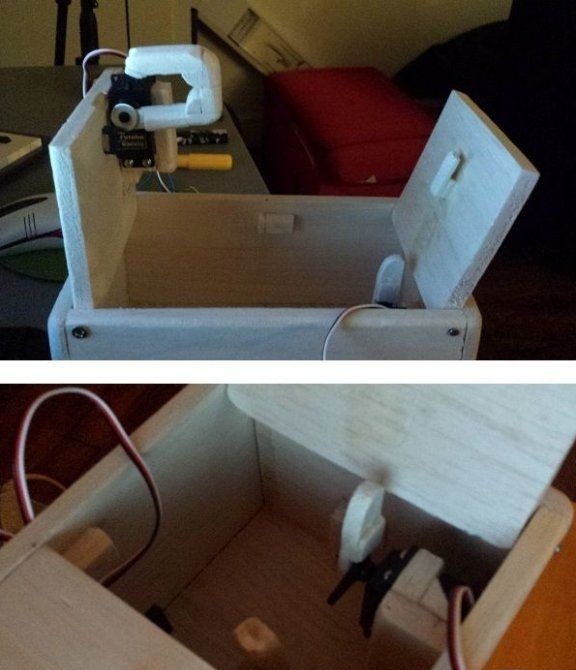
Tercer Pas Instal·lació del motor
El servoaccionament i les mans estan instal·lades de forma experimental, heu de comprovar si la mecànica funciona correctament. Per comprovar el radi de desviació dels motors, podeu utilitzar el programa IDE Arduino.
Per a la fabricació de fusta de mà de qualsevol tipus. El més important és que sigui lleuger, ja que en cas contrari augmentarà el consum d'energia. Pel que fa a la mida de la mà, s’ajusta durant la instal·lació, escollint la longitud desitjada, s’aconsegueix l’efecte desitjat.
El polsador i la mà de la coberta estan muntats de manera que no toquin el servomotor durant el funcionament.
Quatre pas Connectem el servomotor i passem a Arduino
Utilitzant cables i jumpers, heu de connectar tots els elements electrònics entre si d’acord amb l’esquema especificat. Els cables s’han de posar de manera que no interfereixin amb els elements en moviment del robot.
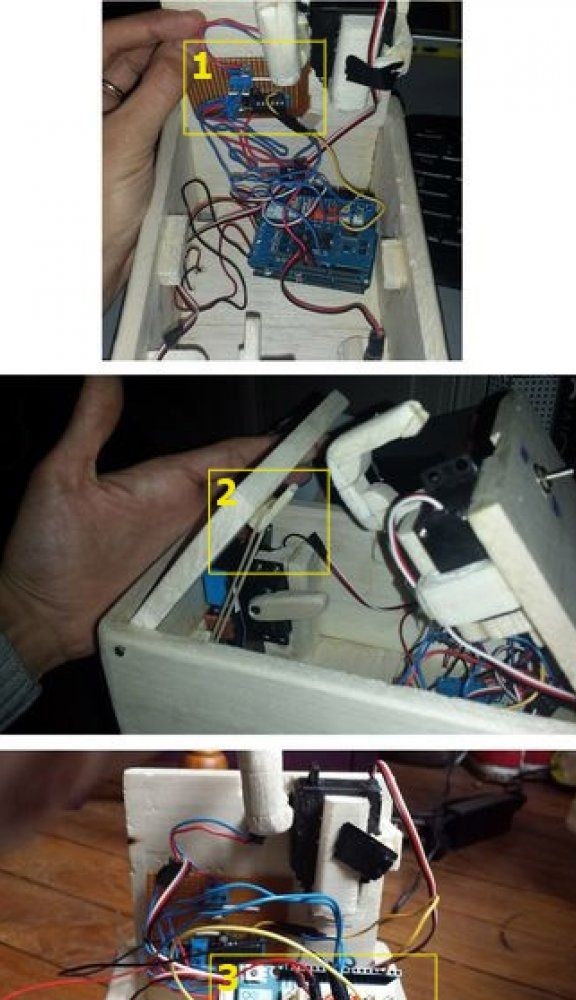
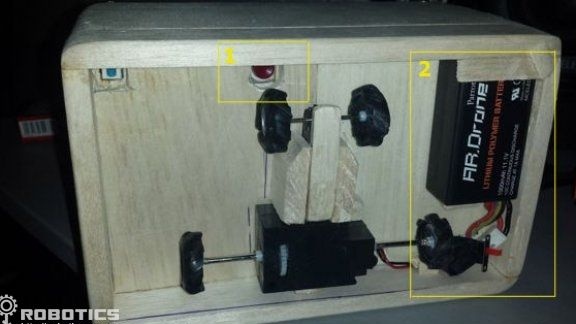
Sota el número 1, podeu veure com es connecta i on es troba el circuit de commutació. El número 2 marca un element com una banda elàstica, per tal que la porta s'obri amb certa tensió. Bé, el número 3 indica l'escut del motor instal·lat a l'Arduino.
Cinquè pas Instal·lació de la part mecànica per moure la caixa
A la part inferior de la caixa hi ha una bateria, un motor amb rodes, una caixa de canvis, un botó de restabliment i un commutador de commutació per controlar la potència del robot. Abans d’acoblar els elements, cal calcular el saldo del pes de la caixa. Perquè el robot sigui estable, a més de l’eix principal se n’instal·la un altre de més.
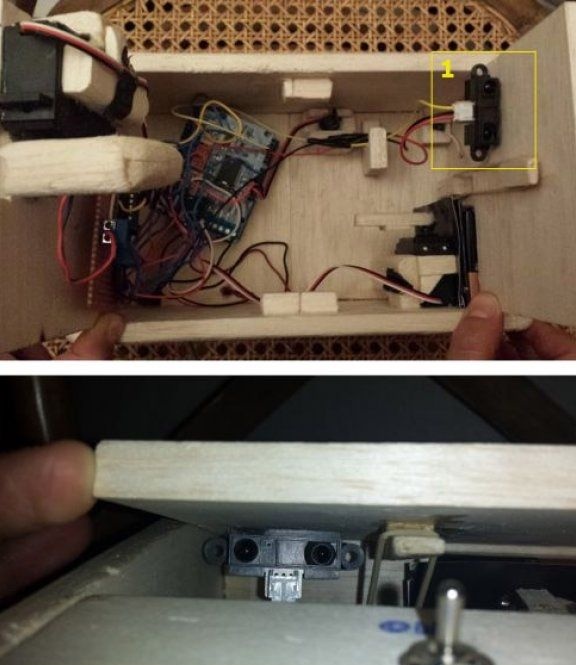
Pas sisè Una altra funció addicional
Per tal que el robot determini la direcció del moviment, es pot equipar amb un sensor d’IR. Al mateix temps, quan algú intenta tocar l’interruptor de commutació, la caixa es desplaçarà cap a la dreta i a l’esquerra. Per a aquests propòsits, el sensor GP2Y0A21 és adequat, té tres cables. El groc s’ha de connectar al tercer passador d’Arduino, el vermell al pin 5 i el negre a terra.
Tot això, un robot senzill i alhora divertit està a punt. Aquesta joguina aportarà alegria no només al nen, sinó que també sorprendrà a molts adults.
Firmware: