


El controlador PWM està dissenyat per controlar la velocitat de gir del motor polar, la brillantor de la bombeta o la potència de l'element calefactor.
Avantatges:
1 facilitat de fabricació
2 Disponibilitat de components (el cost no excedeix de 2 dòlars)
3 Ús generalitzat
4 Per als principiants, torna a practicar i plau-te a si mateix =)
Una vegada vaig necessitar un "dispositiu" per ajustar la velocitat de gir del refrigerador. Per què no me'n recordo exactament? Des del principi vaig provar mitjançant una resistència variable normal, feia molta calor i això no era acceptable per a mi. Com a resultat, escorrent a Internet vaig trobar un circuit al ja familiar xip NE555. Es tractava d’un esquema d’un controlador PWM convencional amb un cicle de durada (durada) de polsos igual o inferior al 50% (donaré gràfics de com funciona després). El circuit va resultar ser molt senzill i no va requerir ajust, el principal era no embolicar-se amb la connexió de díodes i un transistor. La primera vegada que el va muntar en un tauler de pa i el va provar, va funcionar durant mitja volta. Més tard ja vaig separar una petita placa de circuit imprès i tot semblava més correcte =) Doncs ara, mirem el circuit en sí.
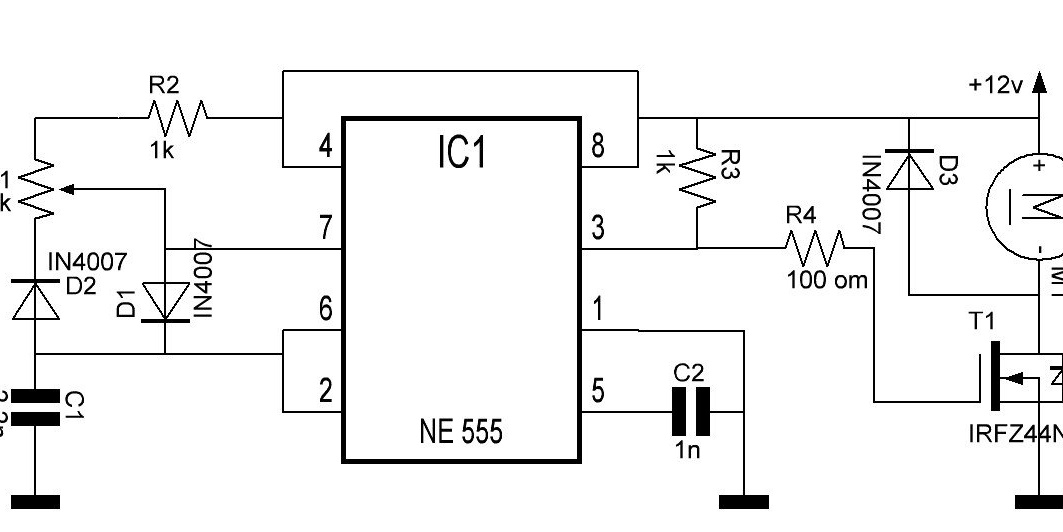
Circuit de controlador PWM
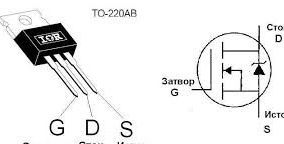
Veiem que es tracta d’un generador normal amb un controlador de cicle de treball muntat segons l’esquema d’un full de dades. I canviem aquest cicle de treball per la resistència R1, la resistència R2 serveix de protecció contra curtcircuit, ja que el 4 pins del microcircuit està connectat a terra mitjançant la clau interna del temporitzador i quan es troba en la posició extrema R1, només es tanca. R3 és una resistència de tracció. C2 és un condensador de regulació de freqüència. L’IRFZ44N és un mosfet del canal N. D3 és un díode protector que evita la fallada del camp durant el trencament de la càrrega. Ara una mica sobre el cicle de treball dels polsos. La velocitat d’impuls és la relació del seu període de repetició (repetició) amb la durada de l’impuls, és a dir, després d’un determinat període de temps, hi haurà una transició de (aproximadament parlant) més a menys, o més bé d’una unitat lògica a zero lògic. Per tant, aquest interval de temps entre polsos és el mateix cicle de treball.
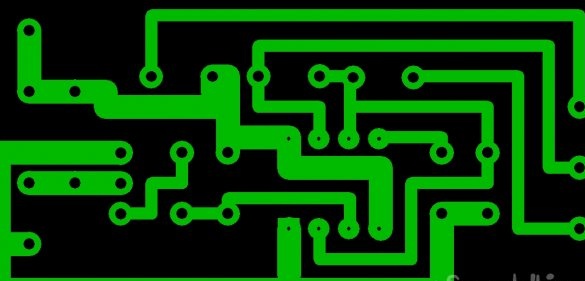
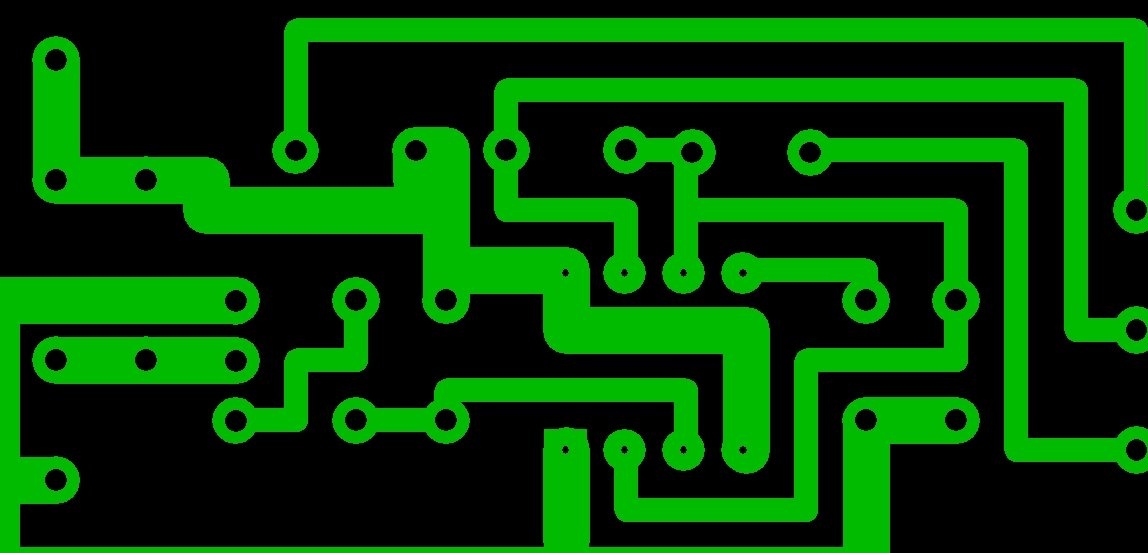
A continuació es mostra una placa de circuit imprès amb la ubicació de les peces i sense elles
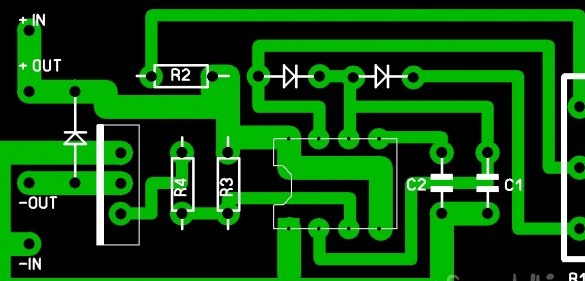
Ara una mica sobre els detalls i la seva aparença.El xip està fabricat en un paquet DIP-8, condensadors ceràmics de mida petita, amb resistències de 0,125-0,25 watts. Diodes de rectificació regular a 1A (el més assequible és a 1N4007 a granel a tot arreu). A més, el xip es pot instal·lar a la presa si en el futur voleu utilitzar-lo en altres projectes i no tornar-lo a soldar. A continuació, es mostren les fotos dels detalls.




P.S: La qualificació del condensador pot variar des de 2,2 nanofarads fins a 4,7 nanofarads. La resistència de la resistència R4 és de 47-180 ohms.
P.P.S: He utilitzat aquest controlador PWM per controlar: velocitat del motor, brillantor de la bombeta i temperatura de l’element calefactor.
Us desitjo tot l’èxit creatiu. Gràcies per la vostra atenció!
Veiem que es tracta d’un generador normal amb un controlador de cicle de treball muntat segons l’esquema d’un full de dades. I canviem aquest cicle de treball per la resistència R1, la resistència R2 serveix de protecció contra curtcircuit, ja que el 4 pins del microcircuit està connectat a terra mitjançant la clau interna del temporitzador i quan es troba en la posició extrema R1, només es tanca. R3 és una resistència de tracció. C2 és un condensador de regulació de freqüència. L’IRFZ44N és un mosfet del canal N. D3 és un díode protector que evita la fallada del camp durant el trencament de la càrrega. Ara una mica sobre el cicle de treball dels polsos. La velocitat d’impuls és la relació del seu període de repetició (repetició) amb la durada de l’impuls, és a dir, després d’un determinat període de temps, hi haurà una transició de (aproximadament parlant) més a menys, o més bé d’una unitat lògica a zero lògic. Per tant, aquest interval de temps entre polsos és el mateix cicle de treball.
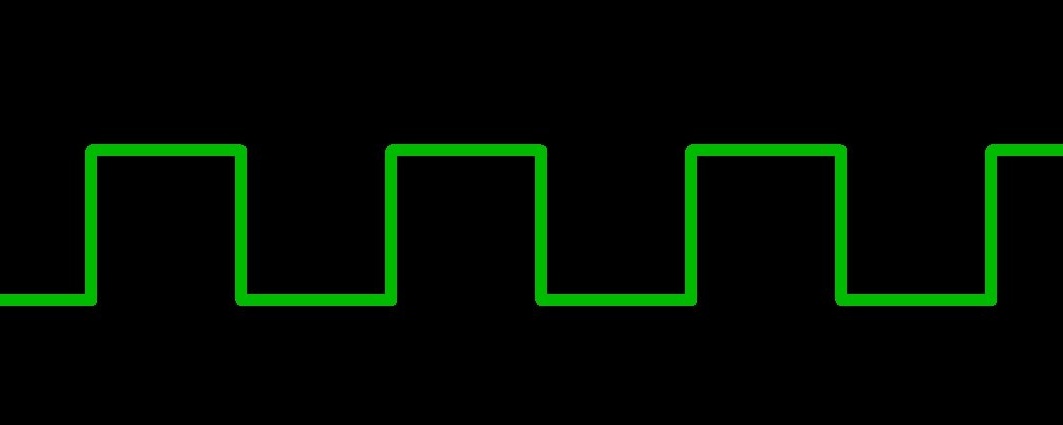
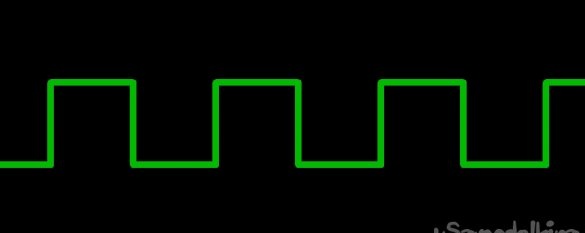
Relació de treball en posició mitjana R1
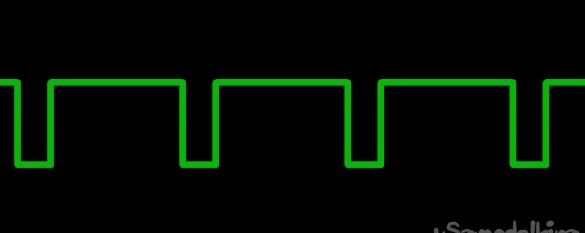
Relació de treball a la posició més esquerra R1
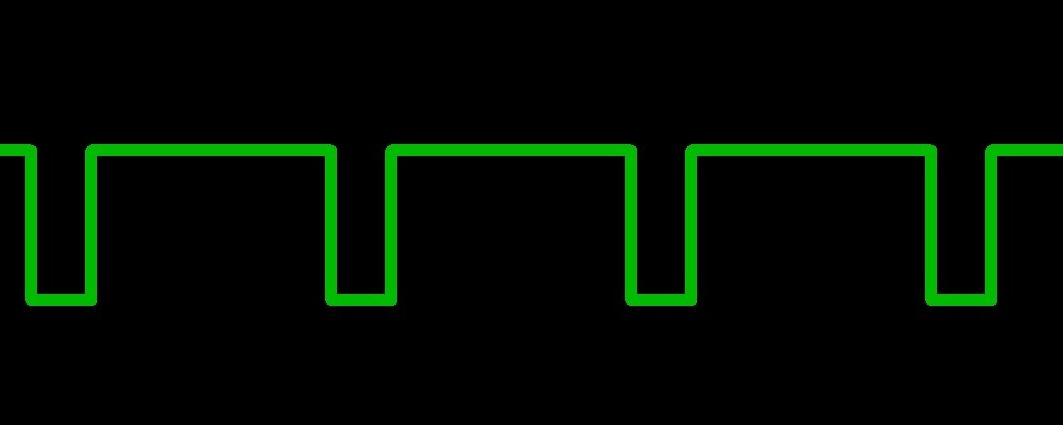
Relació de treball en posició d'extrema dreta R
A continuació es mostra una placa de circuit imprès amb la ubicació de les peces i sense elles
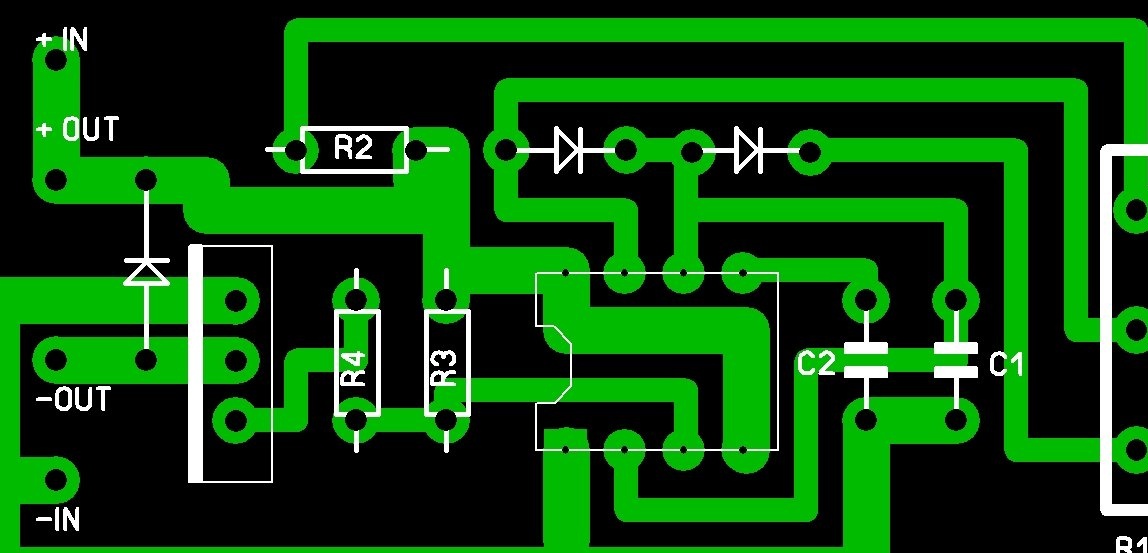
Ara una mica sobre els detalls i la seva aparença.El xip està fabricat en un paquet DIP-8, condensadors ceràmics de mida petita, amb resistències de 0,125-0,25 watts. Diodes de rectificació regular a 1A (el més assequible és a 1N4007 a granel a tot arreu). A més, el xip es pot instal·lar a la presa si en el futur voleu utilitzar-lo en altres projectes i no tornar-lo a soldar. A continuació, es mostren les fotos dels detalls.
P.S: La qualificació del condensador pot variar des de 2,2 nanofarads fins a 4,7 nanofarads. La resistència de la resistència R4 és de 47-180 ohms.
P.P.S: He utilitzat aquest controlador PWM per controlar: velocitat del motor, brillantor de la bombeta i temperatura de l’element calefactor.
Us desitjo tot l’èxit creatiu. Gràcies per la vostra atenció!