




L’autor de Instructables sota el sobrenom de Ikkalebob en va fer força casolans amb moviments globus oculars falsos. I va decidir fer un joystick de manera que es poguessin controlar tots els seus moviments amb una sola mà. Així com el suau moviment de les parpelles i un parpelleig agut. Vegem què va fer.
L’assistent estableix els fitxers necessaris per a repetir el disseny aquí. Al cor del dispositiu hi ha un joystick preparat, sovint inclòs en kits com ara "tot el que necessiteu per dominar Arduino Ara mateix. "Funciona bastant bé, però si necessiteu un millor control de comandament, podeu utilitzar l'empresa Parallax per utilitzar-los amb els seus microcontroladors Propeller. Hi ha altres controls: un botó (per parpellejar bruscament) i una resistència variable de 10 kΩ (per suavitzar fàcilment) mou les parpelles.) Per descomptat, si utilitzeu el joystick en un projecte no relacionat amb els globus oculars falsos (videojoc, el robot, sistema de so surround, etc.), per a aquests controls podeu pensar en un altre propòsit.
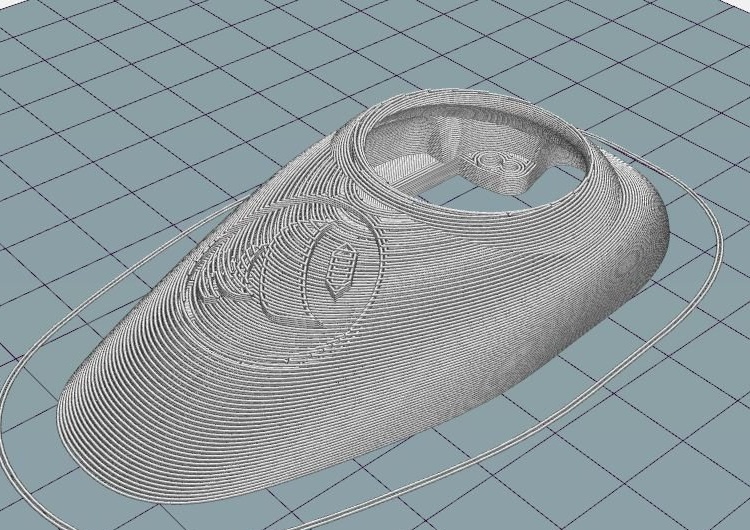
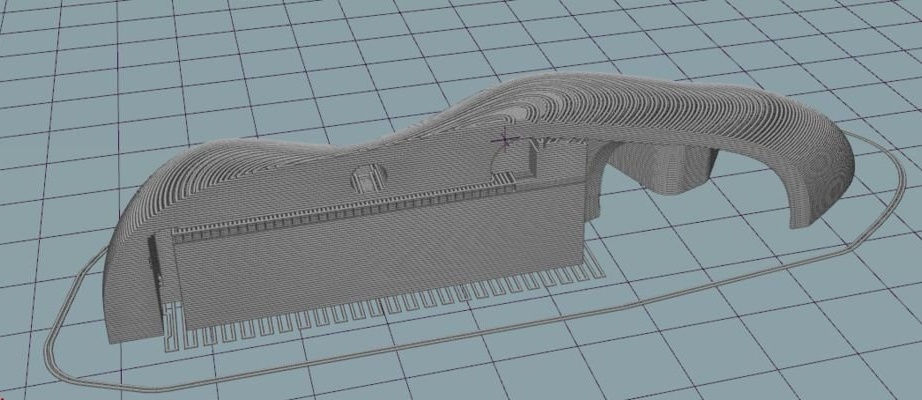
El mestre imprimeix tots els detalls del cas a partir de PLA en dues versions: el prototip - amb un gruix de capa de 0,3 mm, i després - la versió final amb un gruix de capa de 0,2 mm. En ambdós casos, el casc es va muntar sense cap problema. Cal imprimir amb el costat pla cap avall, només es requereix suport sobre els elements de les parts del cos penjats a un angle inferior a 10 °. Si el ventilador de la impressora 3D no és prou potent, pot ser que es requereixi més suport.

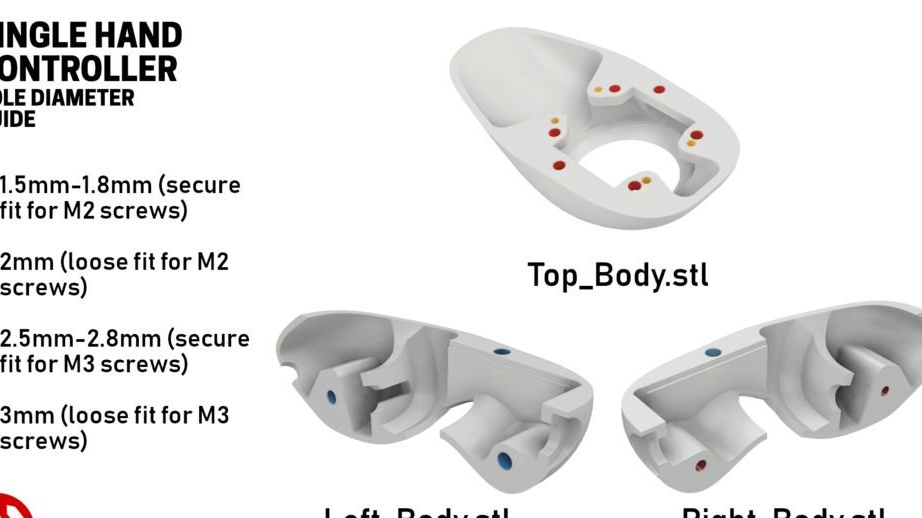
Els forats dels cargols es fan de diversos diàmetres reduïts de manera que es mantenen bé després de cargolar. Les imprecisions en la impressió poden provocar la necessitat de foradar lleugerament alguns forats. A continuació es mostra la ubicació dels cargols i els seus paràmetres:
L’únic que requereix una gran fidelitat requereix poliment és el forat del mànec del joystick. Però els perfeccionistes poden tractar ella i altres superfícies de les parts del cos, que semblen massa desiguals.
El joystick està connectat a un dispositiu extern amb un cable de sis fils. Quan s'utilitza Arduino Uno, el diagrama de connexió pot ser, per exemple, aquest:
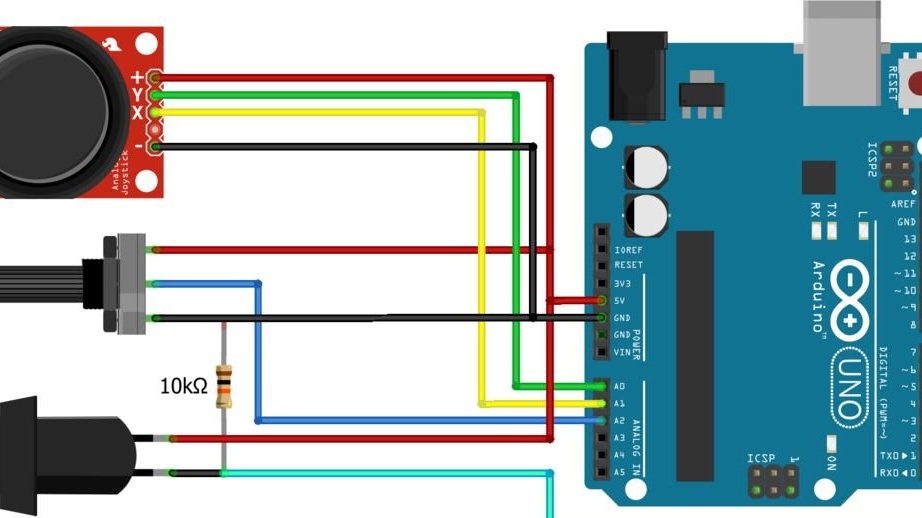
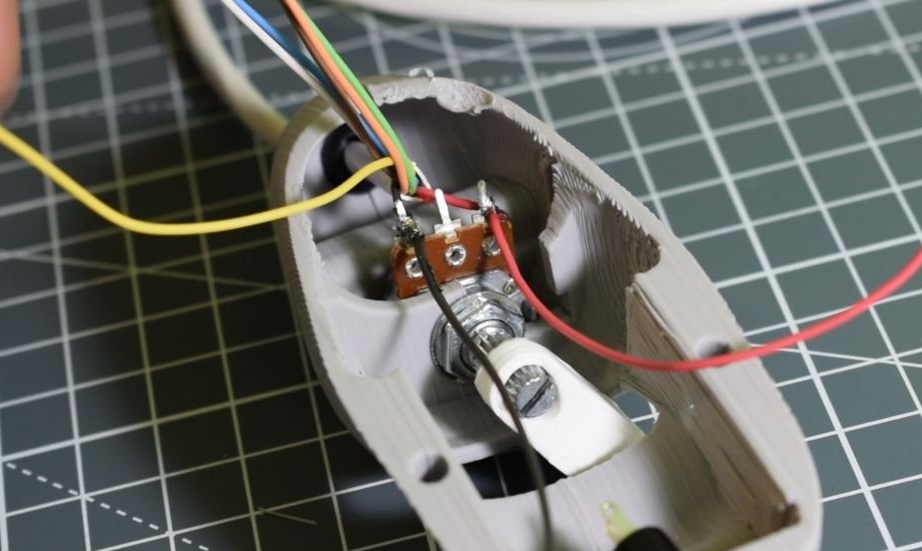
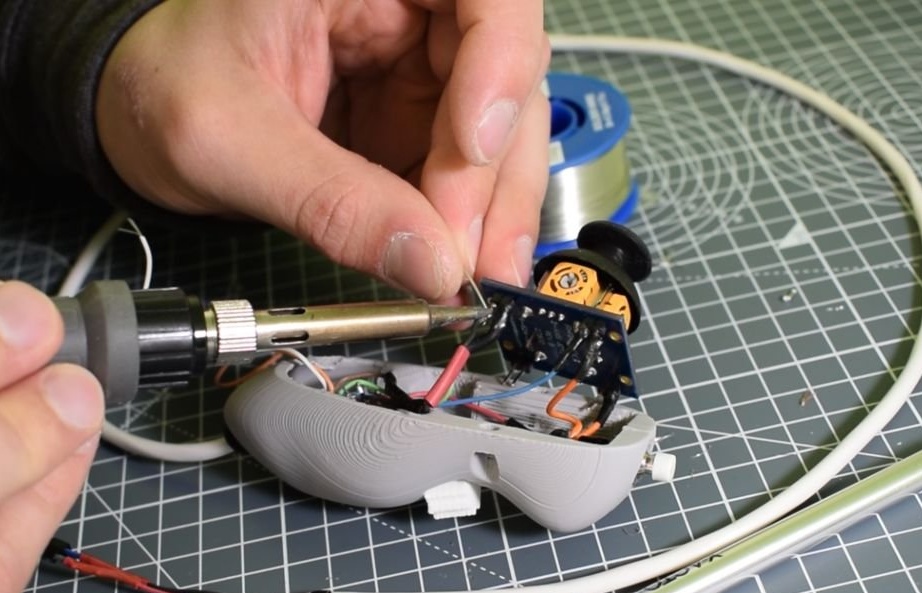
Per descomptat, podeu seleccionar altres entrades del tauler i tornar a fer el circuit i el programa en conseqüència. El resistent de tracció del botó està situat en el joystick. El mestre tot just comença a recollir-lo:

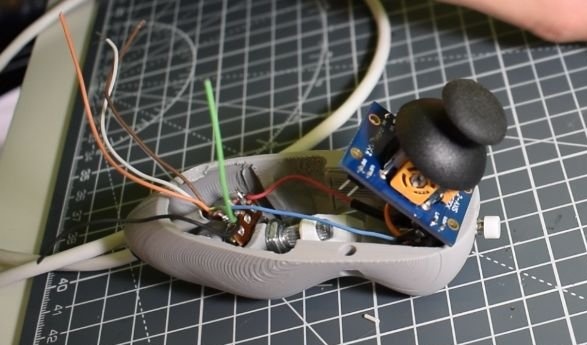
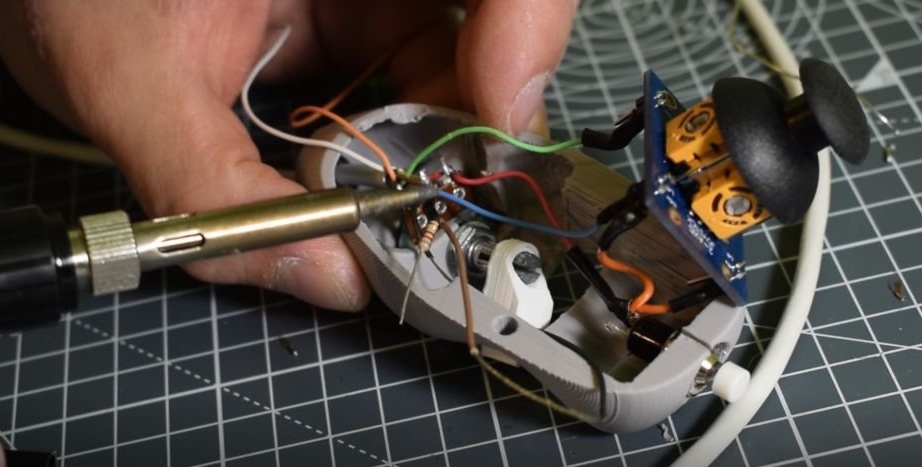

El joystick està a punt. Utilitzar-lo amb una sola mà, com veiem, és molt convenient:
Si augmenteu el nombre de botons a quatre i elimineu la resistència variable, podeu fer palanca de comandaments "d'un sol braç" per a NES. Existeixen esbossos per convertir senyals de botons a els requerits per aquesta consola. Qui serà el primer a intentar jugar, per exemple, a Contra per als dos jugadors alhora?