

Benvolguts lectors, abans de tu electrònica espelmes, però aquesta vegada inusuals. El debat sobre el que és millor, AVR o PIC, no va tenir sòl entre 1976 i 1996, tots els vint anys en què PIC ja hi era i AVR no hi era. I llavors va començar, i continua fins als nostres dies. L’autor, amb el sobrenom de Thierry, va decidir participar en aquesta disputa per ambdues parts, fent dispositius amb un propòsit idèntic i de característiques properes a ambdues. Així que, independentment del resultat, va guanyar pel seu compte i es va disputar per ell mateix. Vegem com va passar això.
L’assistent comença seleccionant microcontroladors per a les dues opcions. casolans. De manera que, des del costat Atmel, el xip ATTiny25 entra dins l’anell, i des del costat Microchip - PIC12LF1822. Tots dos són de vuit pins, que no requereixen circuits de cronometratge externs per al generador de rellotge. Ara toca pensar en l'algorisme. El mestre s’atura en això. Un cop detectada la foscor, la vela electrònica surt del mode de repòs i comença a parpellejar, la intensitat del parpelleig canvia cada minut. Després de tres hores, torna a la modalitat de repòs i, després, quan es torna a llum i torna a enfosquir, es repeteix el cicle.
La diferència entre els pinouts dels microcontroladors no va permetre que el circuit de les dues opcions fos igual. A continuació, es mostren dos esquemes en una figura:
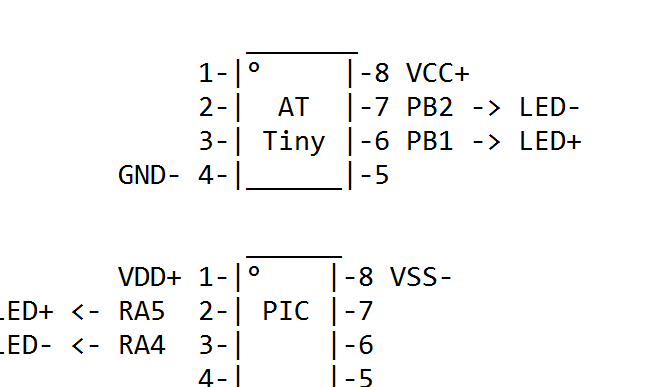
El principi de funcionament dels dos esquemes és el següent. Els LED poden funcionar com a fotodiodos. Per canviar entre el mode LED i el fotodiodi, no és necessària cap reconnexió externa, ja que tots dos microcontroladors poden canviar programàticament les seves sortides tant al mode d'entrada com al mode de sortida. Bé, ara comencen les diferències. El mestre no va aconseguir que ATtiny interactués amb el programador a una freqüència inferior a 500 kHz, i vaig haver de triar-lo. PIC va aconseguir frenar fins a 31 kHz.
En mode de suspensió, l’opció de l’AVR consumeix 4 μA, a la PIC - menys d’1 mA. "Despertar-se", però no carregar-se al LED, respectivament, de 190 i 5 μA, aquí la diferència és enorme. En mode de funcionament i sota càrrega en forma de LED - 2500 i 2300 μA, respectivament. Però la diferència en el nombre de dies que dura la bateria si el dispositiu abandona el mode de suspensió durant tres hores al dia és petita. AVR - 30 dies, PIC - 33.Si, en la versió AVR, la luminositat mitjana es redueix pel PWM, podeu "treure" els mateixos 33 dies.
Al mestre li agradava la capacitat del PIC de consumir només 5 μA, mentre que NO en mode de somni i feia alguns càlculs. En AVR, fins i tot amb una disminució de la freqüència del rellotge fins a 128 kHz, el consum actual es manté força gran - 110 μA. Però aquí podeu aplicar aquesta tècnica: desperteu el microcontrolador des del mode de suspensió, per exemple, cada 100 mil·lisegons per només un pocs per cent del temps.
Per a productes casolans, és adequat qualsevol dels tipus de microcontroladors següents: ATTiny25 / 45/85 o PIC12 (L) F1822 / 1840. El LED és de color groc, com LTL2T3YR6JS, el seu voltatge d’obertura és inferior al del blanc. El codi C es presenta en dos fitxers: i.
A continuació es mostra la part posterior de la placa amb el suport de la bateria original:
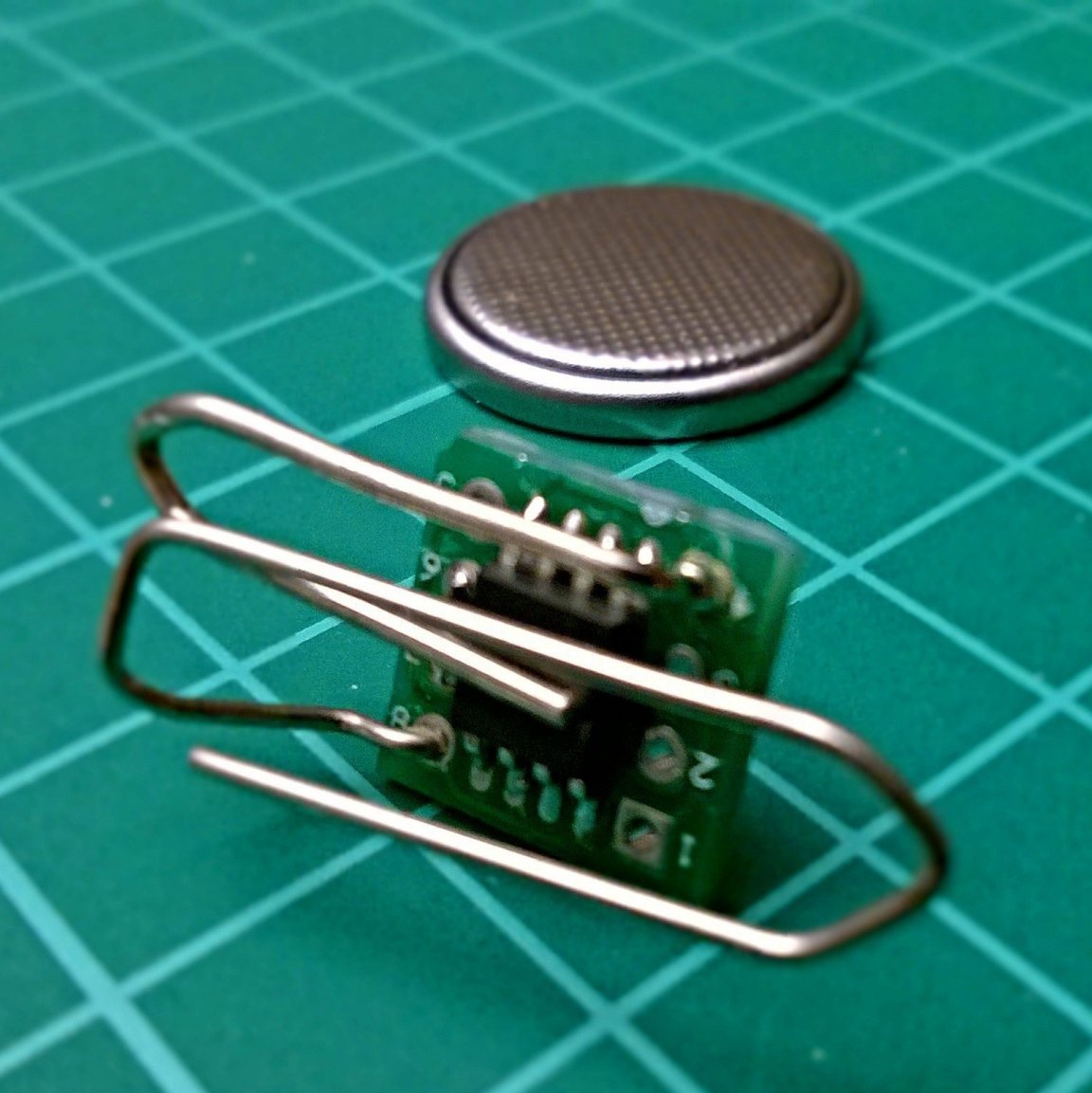
Com podeu veure, el mestre va fer una versió del tauler: a doble cara, amb coixins per als dos tipus de microcontroladors. Ell no aporta la placa base del tauler, però per al disseny de tres peces, inclosa la bateria, no és necessari, podeu accedir-hi amb un tros de la placa del pa com el perfboard.
Ara determina el guanyador. Sense tècniques d’estalvi d’energia addicionals, PIC guanya. Amb ells, podeu obtenir el mateix nombre de dies de treball d’un element, de manera que és un sorteig. Ambdues opcions superen una autèntica espelma de te, que ocupa fins i tot un volum lleugerament més gran, que no podrà brillar durant tant de temps. Però quan s’utilitza per al seu propòsit previst - mantenir el te en un clima escalfat - ja guanya, ja que el substitut electrònic no és capaç d’això.
És bo que el mestre sigui capaç de programar tots dos tipus de microcontroladors. Aquestes persones no tenen temps per als holivars (per descomptat, per còmics, per descomptat), es tornen a estudiar ràpidament amb el que necessiten per treballar directament. Es fan empleats molt valuosos.