


Bona tarda amants casolans! Avui muntarem un telemetre senzill Arduino Pro Mini El dispositiu és capaç de mesurar una distància de 2 a 400 cm. L’error d’aquest dispositiu només arriba a +/- 1-5 cm, depenent de la distància mesurada.
Eines i materials
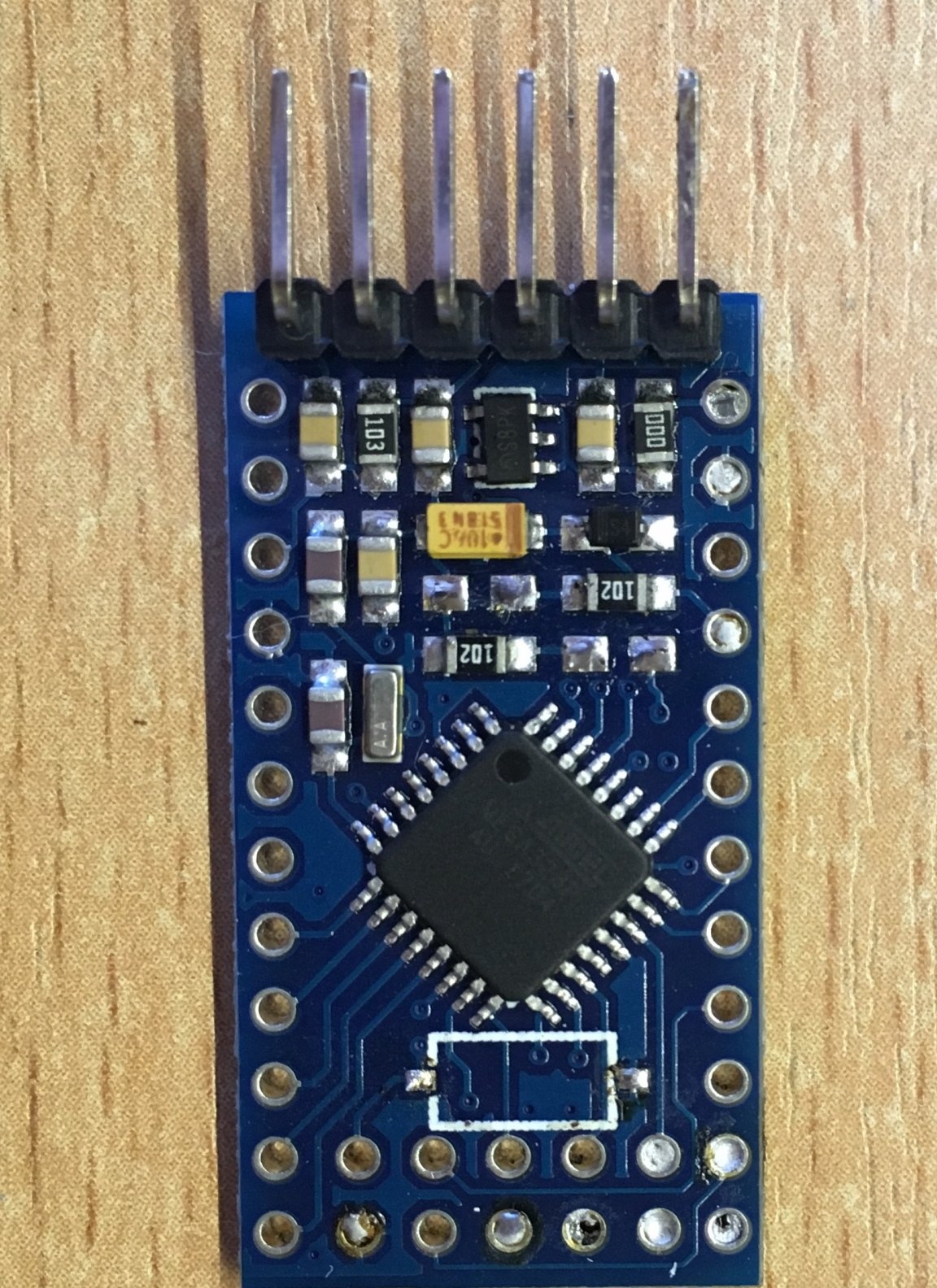
-Arduino Pro mini
Sensor HC-04
- Indicador a tm1637
-Wire (tinc - MGTF 0.12)
-Programador
-Habitatge plàstic
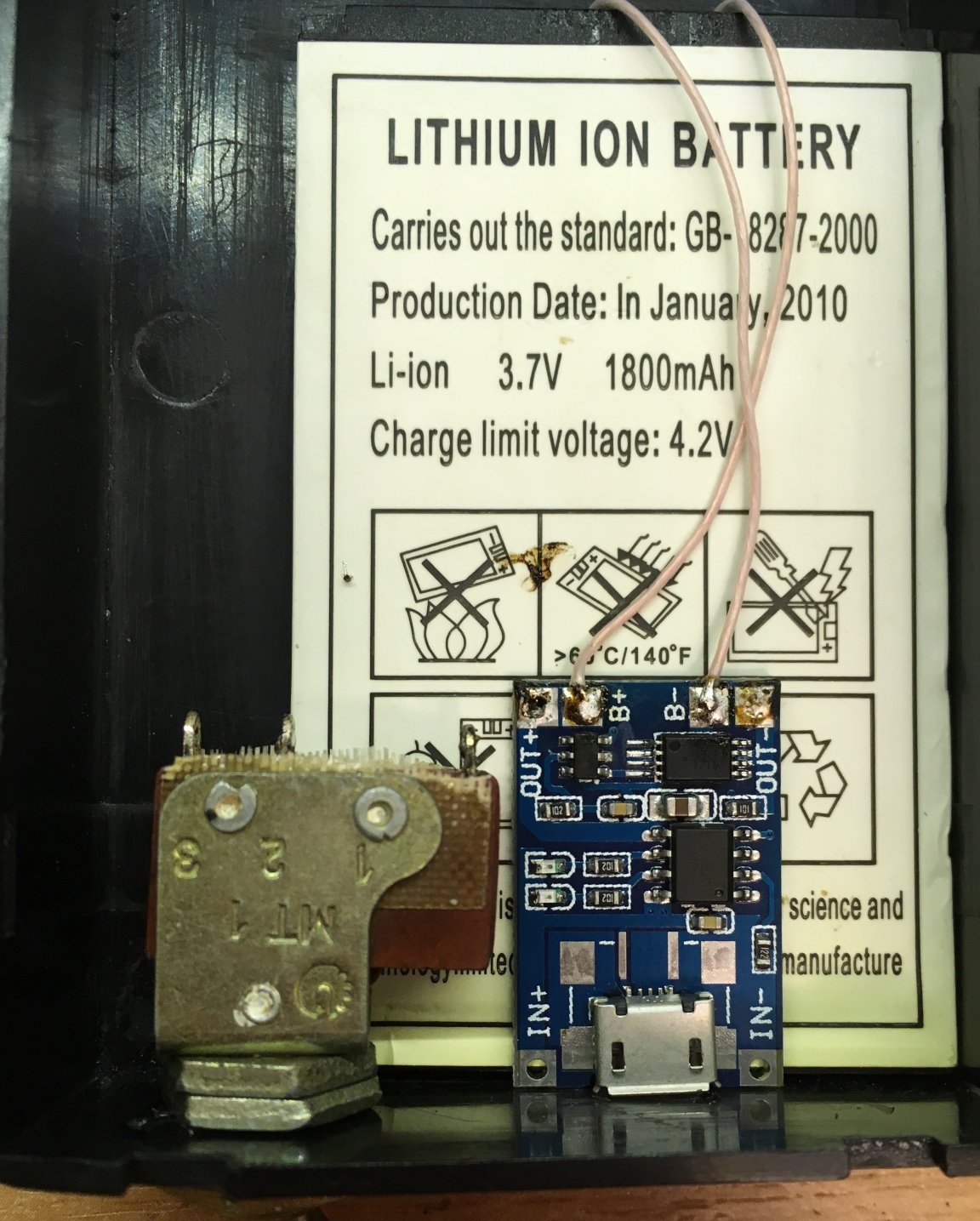
-Bateria en línia
-Pic petit interruptor
- Placa de càrrega a la TP4056
Superglue
-Soldat de ferro
-Solder
Rosin
Broca, perforació, etc.
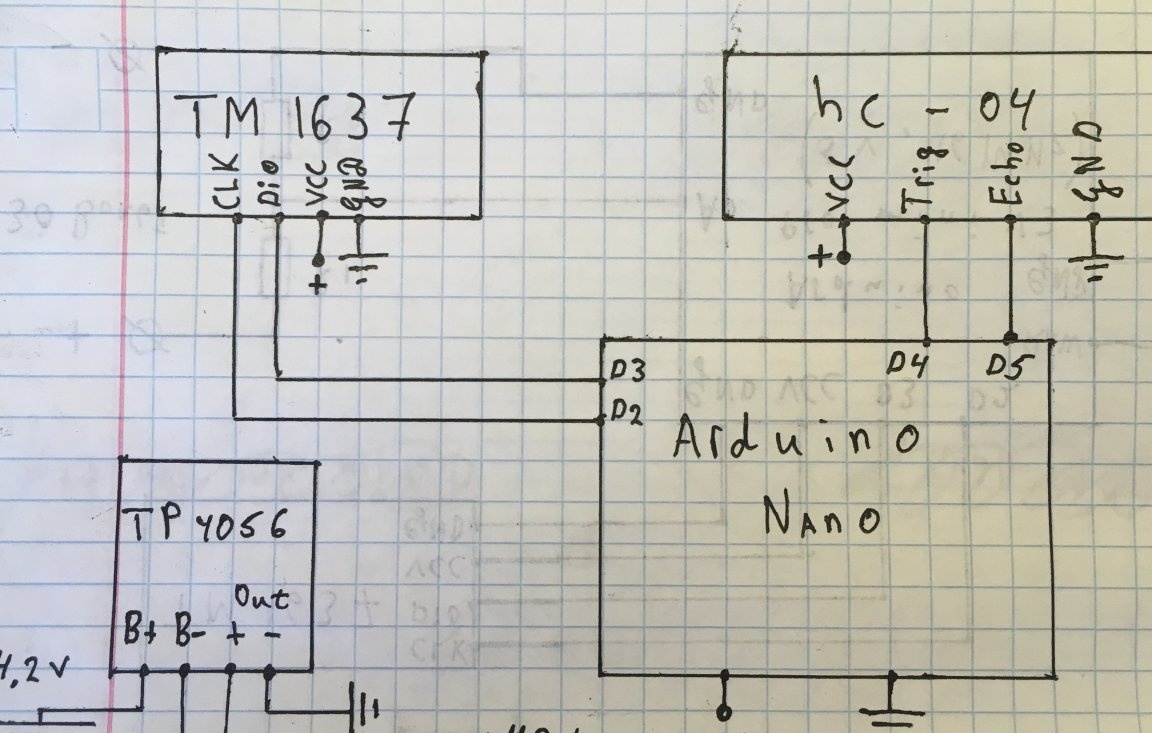
Primer pas. Esquema:
L’esquema és simple, sense addicions.
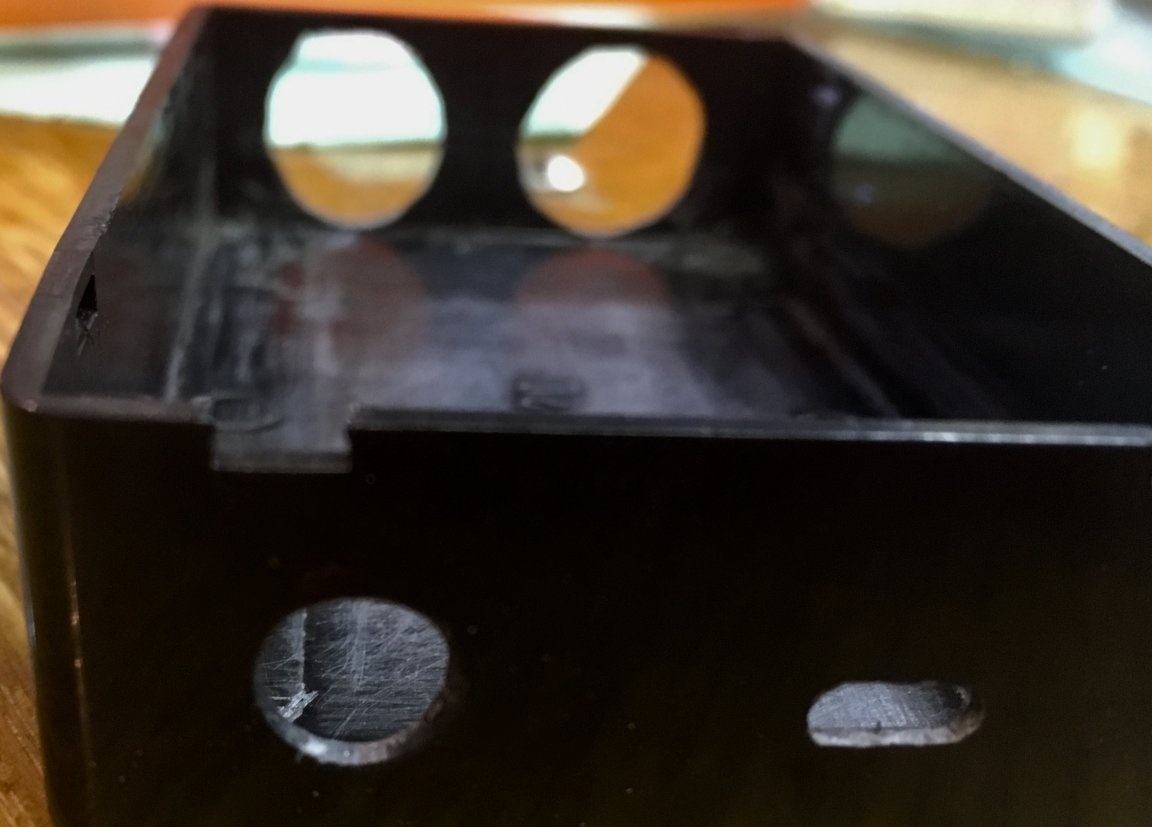
2n pas. Preparació del cas:
Primer provem el sensor i foradem dos forats de 15 mm.

A continuació, feu un forat per a un connector micro-usb amb un trepant de 3-3,5 mm.
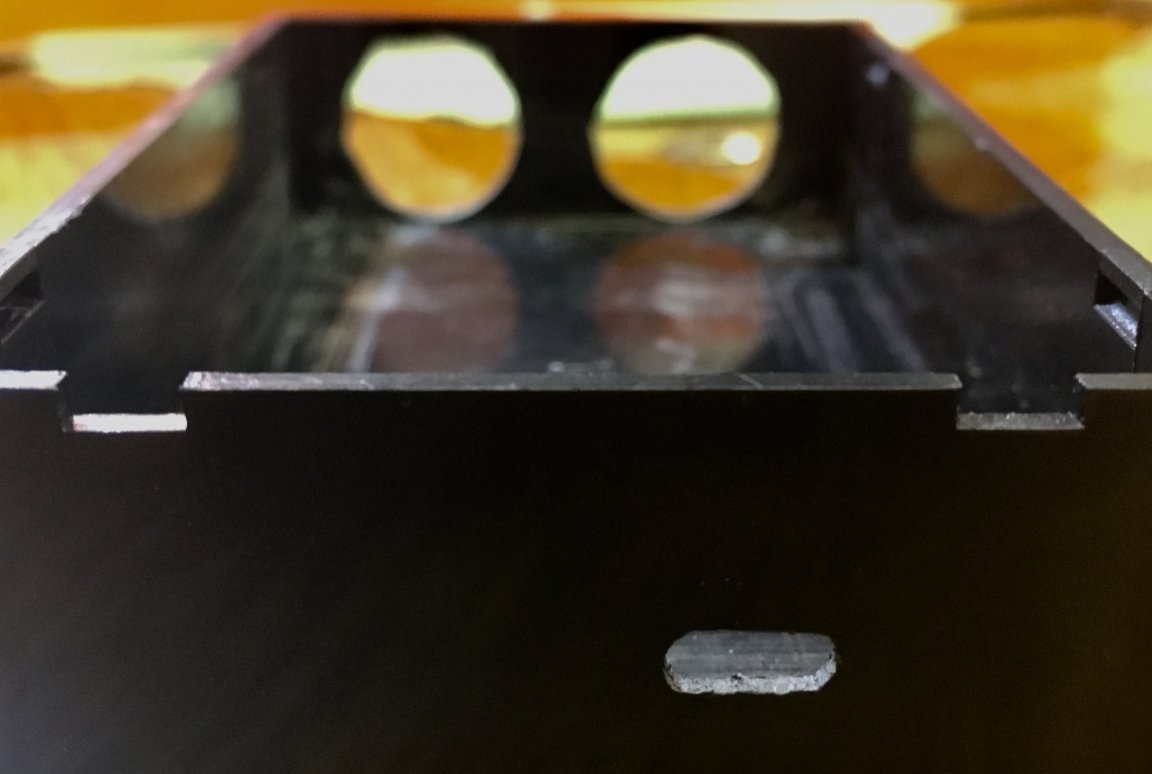
Seleccionem una broca per al diàmetre de l’interruptor i la broca.
A la tapa creem una “finestra” per l’indicador de set segments (a la foto sense processar) i acabem totes les irregularitats amb un fitxer.

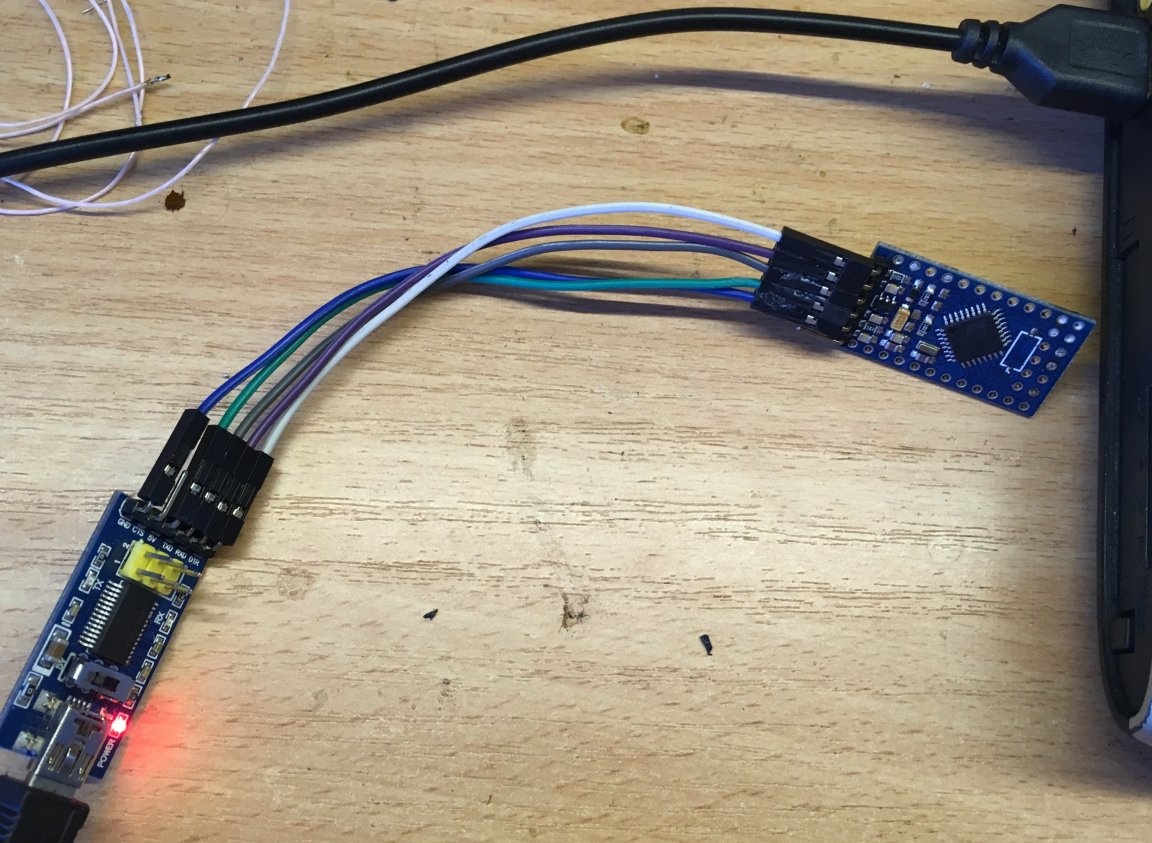
Pas tercer. Firmware:
A l’esbós es destaquen les variables que es poden ajustar per a tu mateix. Tot el codi està comentat.
#include // biblioteques de treball
#incloure
// ------------- Per configurar --------------------------------- --------------------------------
llarga llarga = 0; // 0: mesura la longitud des del sensor
// 1 - mesura la longitud de la paret de la carcassa, que és oposada al sensor
unsigned int corpus = 10; // distància entre el sensor i la paret del cas contrari (en centímetres)
#define CLK 2 // pins per connectar
# definir DIO 3
# definir TRIG 4
#definir ECHO 5
// -------------------------------------------------------- ----------------------------------------------
impuls sense signar = 0; // variables per al càlcul
unsigned int sm = 0;
Disp. GyverTM1637 (CLK, DIO);
void setup () {
pinMode (TRIG, OUTPUT); // estableix com a sortida
pinMode (ECHO, INPUT); // estableix com a entrada
màxima distribució (7); // brillantor 0-7
punt de disp. (0); // apagar el còlon
disp.clear (); // esborreu l’indicador
}
void loop () {
digitalWrite (TRIG, HIGH); // subministra 5 volts
delayMicrosegons (10); // retardar 10 microsegons
digitalWrite (TRIG, BAIX); // servir 0
impuls = impulsIn (ECHO, HIGH); // mesura la longitud del pols
sm = impuls / 58; // convertir a centímetres
if (Long == 1) {// comproveu la configuració
sm = sm + corpus;
}
if (sm <= 2) {// zero valors falsos
sm = 1;
}
if (sm> = 405) {
sm = 1;
}
int enter = sm / 10;
int decimal = sm% 10;
decimal = decimal * 10;
disp.displayClock (nombres enters, decimals); // sortida a indicador
retard (300); // retard 0,3 s. entre la sortida de valor
}
A continuació, connecteu el programador i flash MK.
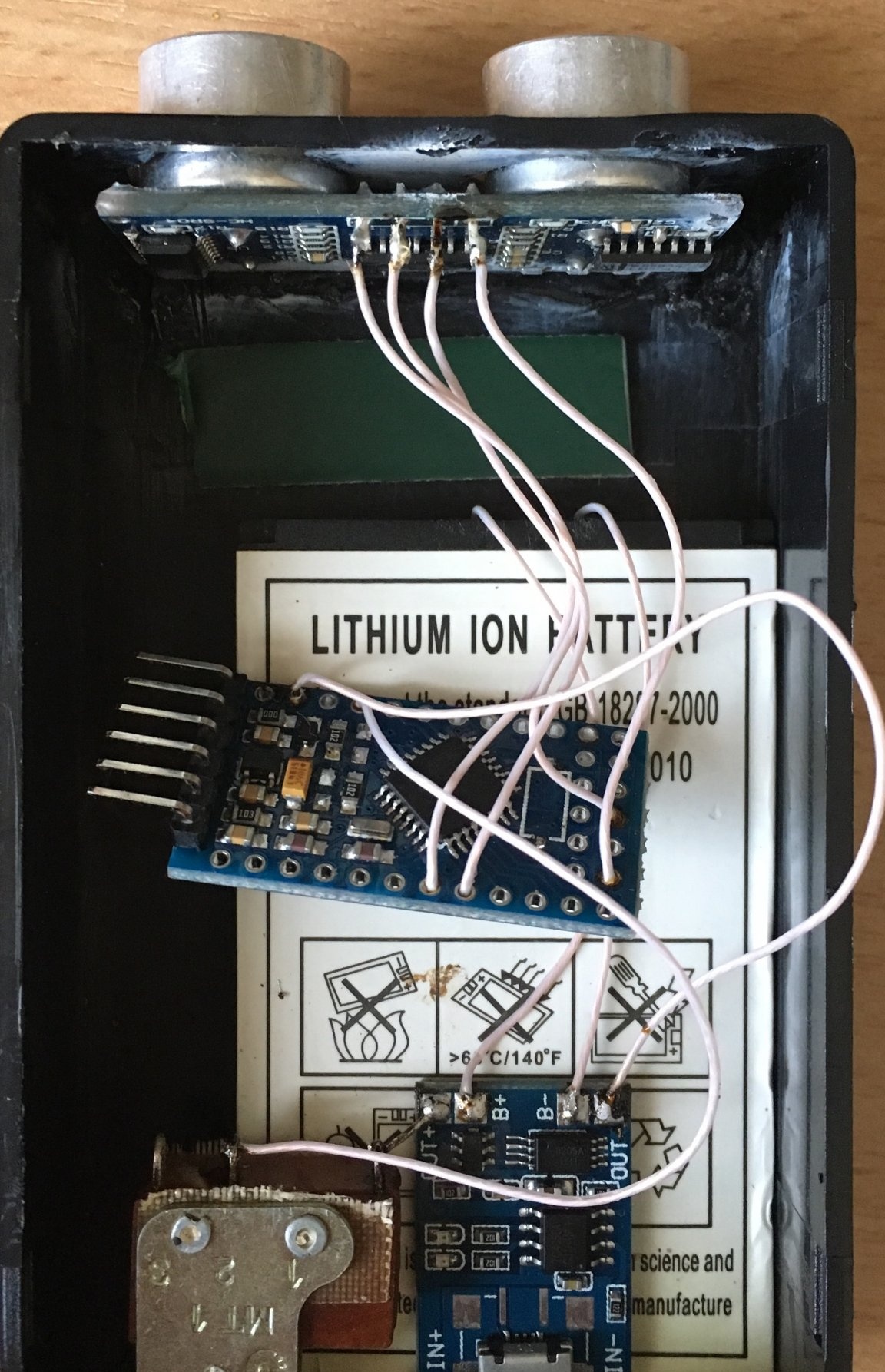
Pas IV. Muntatge:
Com que el dispositiu funciona amb bateria, no necessitem càrregues addicionals. Per tant, a la placa Arduino, vam vendre els LED i el botó de restabliment (per reduir la mida).
Pegueu la bateria al cos en superglue. Colem la placa de càrrega a la bateria, instal·lem l’interruptor i la soldem tot segons l’esquema.
Es va enganxar el sensor a la caixa i ho vam soldar tot segons l’esquema, al principi hi va haver una idea d’enganxar el tauler a la cinta de doble cara, però després es va decidir enganxar-lo a la superglue. L’indicador es pot cargolar o enganxar.
Pas cinquè. Prova:
Nota: el quart segment sempre mostrarà 0. Per assegurar-se que l'últim segment no està buit. Resulta que si la lectura és de 270, això vol dir que la distància és de 27 cm.


Per assegurar-se, el testimoni es pot verificar amb la regla.