

Aquest article tracta sobre la fabricació d'equips de control de ràdio proporcional basats en tauler Arduino. Una característica interessant del projecte és que l'equipament es va concebre com una alternativa a l'equip "adult", però que podeu fer vosaltres mateixos. Hi ha claus de retallada al transmissor, que és important per al control, per exemple models L'avió, el transmissor també està equipat amb una petita pantalla amb LED orgànics, que mostra informació bàsica sobre el funcionament del transmissor. L’equip està dissenyat per a 6 canals, 4 proporcionals i 2 discrets. L'autor també va posar les bases per a la futura addició de dos canals més proporcionals, es van afegir 2 potenciòmetres al cas, però de moment no hi estan implicats. Tot i això, això és suficient per controlar el model d’un avió, un vaixell o un cotxe, i els canals discrets us permetran controlar la càrrega addicional, per exemple, la inclusió de fars, llums de plataforma, llums de navegació o fins i tot llançar petits míssils. L'equip disposa de dos modes de control: lineals i exponencials.
Per al transmissor necessitareu:
1 x Arduino NANO / UNO / ProMini
1 x placa de protecció BMS per a tres llaunes d’ió Li
Conector de 1 x 5,5 x 2,1 mm
1 x Convertidor DC / DC Step Up XL6009
1 x convertidor reduït de LM2596 petit (en parlaré per separat)
3 x 18650:
2 x joysticks JH-D202X (venut a Ali)
2 x commutador de commutació
Pantalla OLED 1 x i2c 0,96 polzades 128X64
1 x mòdul de ràdio NRF24l01 amb amplificador i antena
9 x botó tàctil 6 * 6 * 5 mm
Resistències de sortida (veure diagrama)
Per al receptor necessitareu:
1 x Arduino NANO / UNO / Pro Mini
1 x mòdul de ràdio NRF24l01
1 x regulador de tensió AMS1117 3.3V
30 x pls pintes
1 x panell
Condensador d’1 x 10 uF
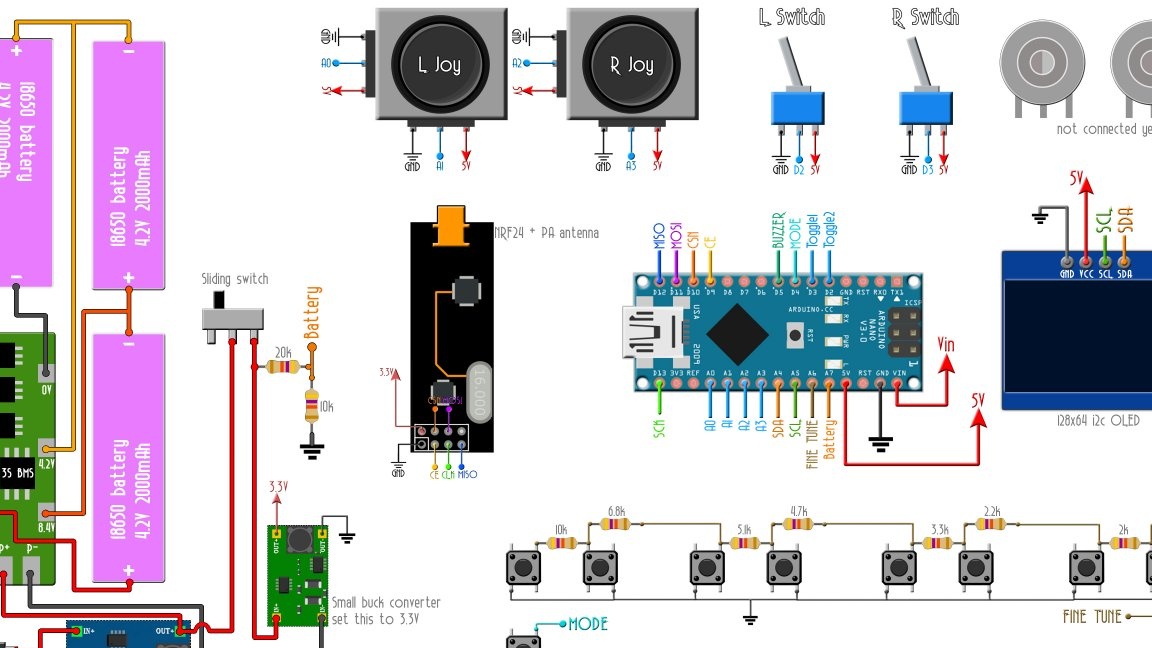
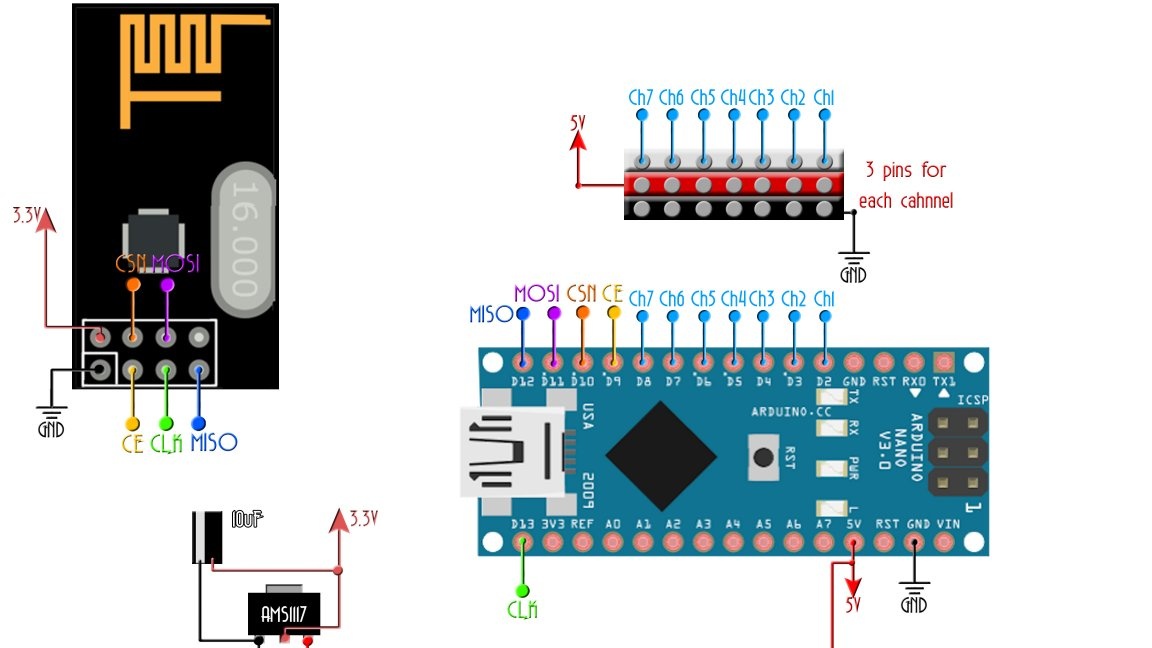
A continuació, podeu veure una imatge gràfica de tots els components i un esquema de la seva connexió. Abans del muntatge, s’han de configurar els convertidors de bucs, XL6009 a 12,6 V (aquest mòdul s’encarrega de la càrrega), LM2596 a 3,3 V (alimentació del mòdul de ràdio). En lloc de LM2596, teòricament és possible utilitzar ASM117, segons el full de dades, la tensió d’entrada màxima d’aquest estabilitzador és de 15 V, però s’aconsella no aplicar-lo superior a 12 V. Aparentment, basant-se en aquestes consideracions, l’autor va utilitzar un altre convertidor de CC / CC. En lloc d'això, també podeu utilitzar un estabilitzador ajustable, per exemple LM317.
Habitatge
El cas consta de dues parts principals: la superior i la inferior. A més, s’imprimeixen 9 botons (8 per a retallar i un botó de mode), 5 còpies de seguretat per a botons, un bisel de la pantalla i un control lliscant d’energia.L’autor va imprimir un PLA amb una goma d’esborrar amb una cobertura del 20%, una tovera de 0,4 mm i una alçada de capa de 0,3 mm. Per cert, ningú no prohibeix l’ús d’un altre estoig, només pots agafar una caixa adequada, enganxar-la tu mateixa o treure una caixa prou gran d’una joguina xinesa, gairebé es venen en bosses en llocs classificats.
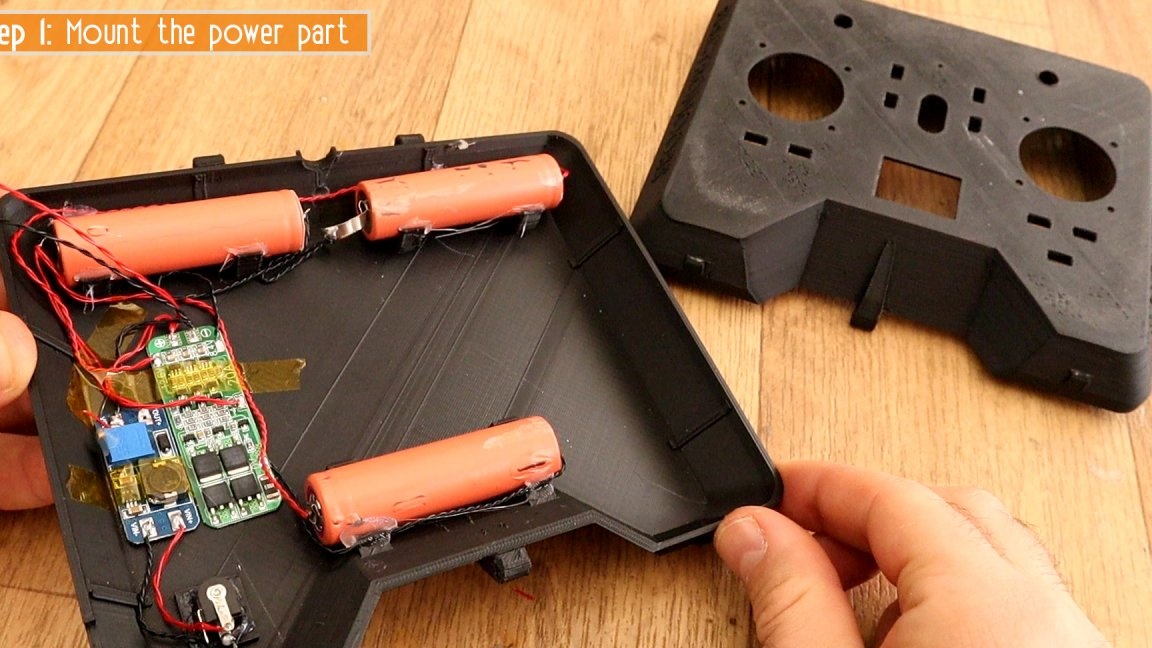
Muntatge del transmissor
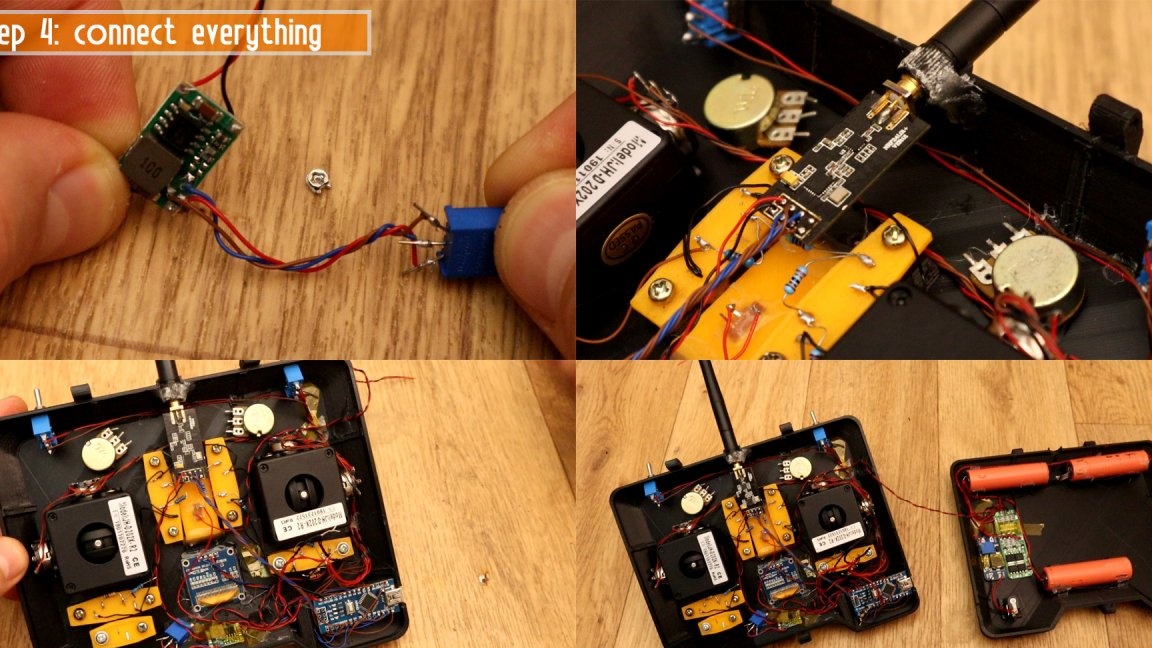
Les bateries es connecten en sèrie. L’autor ho va fer amb soldadura, vull tenir en compte que les llaunes de soldar de 18650 requereixen una mica d’habilitat, així que si no teniu aquesta experiència, compreu piles amb pètals ja soldats i soudeu-les. A més, les bateries d’acord amb l’esquema anterior es solden al mòdul BMS, l’entrada de la qual es subministra amb tensió del convertidor XL6009 (es pot utilitzar en lloc MT3608). El BMS s’encarrega de carregar / descarregar de manera uniforme totes les llaunes i apagar l’alimentació quan s’esgoten les bateries. També es pot controlar la tensió mitjançant la pantalla. Les bateries es carreguen amb una font d'alimentació de 9 V amb una corrent no superior a 3 A (màxim per XL6009). De fet, el corrent de càrrega s’ha de calcular depenent de la capacitat de les bateries i prendre l’alimentació amb un corrent lleugerament inferior o limitar-la. És convenient muntar els mòduls a la carcassa amb l'ajut de cintes de doble cara "automobilístiques".
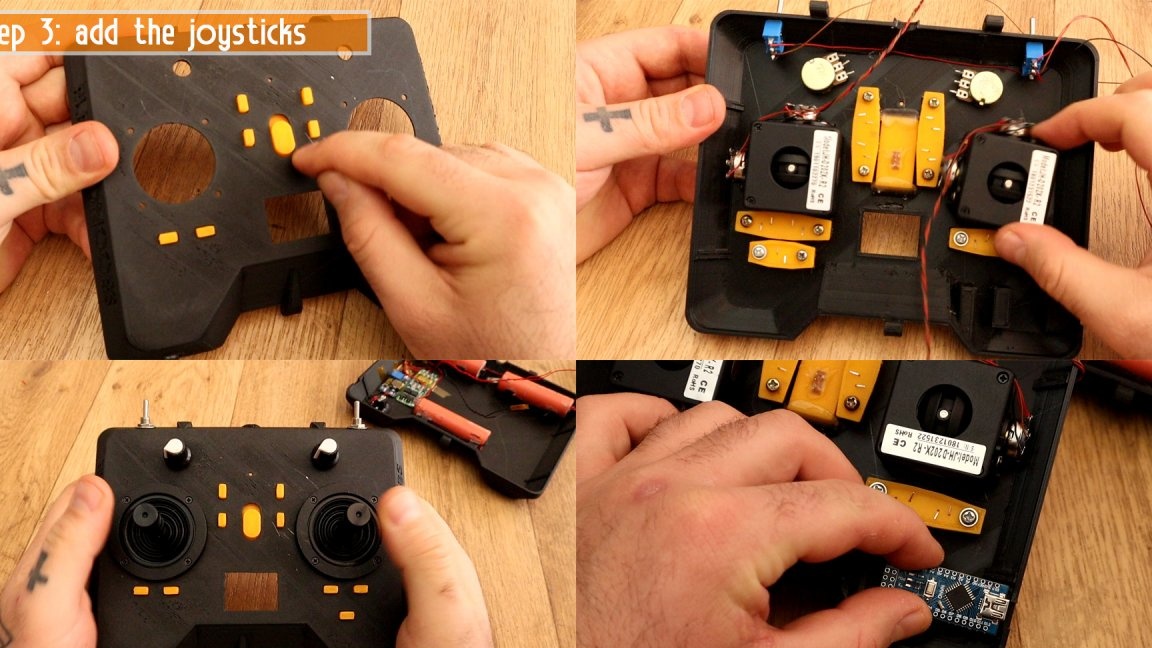
Els botons de rellotge s’instal·len en plataformes especials, després dels quals s’adhereixen amb petits cargols als suports corresponents dins de la caixa. Aquí, de fet, tot està al nivell del dissenyador i s’entén bé a la foto.
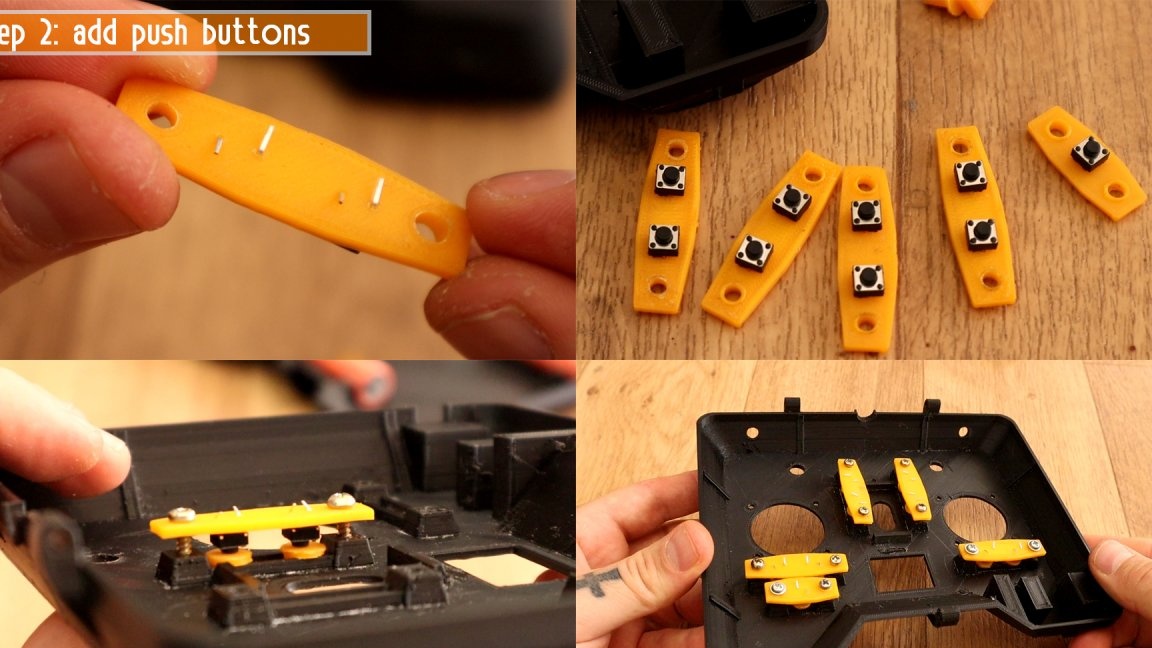
Els botons estan interconnectats per resistències, deixant essencialment un petit teclat resistent, que permet utilitzar només un pin de la placa Arduino. Els cables es solden als potenciòmetres del joystick, els cables extrems es posen a terra i 5 V, la mitjana condueix al corresponent passador Arduino. Tinc plans de repetir aquest esquema, ja he experimentat una mica i puc dir que el codi té la funció d’invertir els canals automàticament segons sigui necessari, però encara no he entès com l’esquema determina aquesta necessitat. És a dir, que la inversió del canal es realitza fonamentalment mitjançant la soldadura de les conclusions extremes a llocs. Aquests joysticks, en el moment d'escriure, es venen a Ali a un preu aproximat de 7 dòlars la peça, tant si depèn de vosaltres com si us correspon o no. En lloc d'això, podeu utilitzar els mòduls joystick per arduino o joysticks dels controladors de joc.
De fet, el joystick funciona com a divisor, desviant el mànec, canviem la tensió a la sortida mitjana del potenciòmetre i, en funció d’aquest voltatge, l’arzino determina la desviació.
[centre] [/ centre]
També es connecten els tumblers. Els interruptors de connexió són necessaris on-off, ja que el canal és discret i només té dos valors, 0 o 1, depenent de si la sortida de l’arduino és atreta a terra o a una font d’alimentació de 5 V. A més, cal que l’interruptor d’encesa sigui necessari, si deixeu la sortida “penjada a l’aire”, què passaria en utilitzar tres posicionals, el controlador no entén què està passant i el valor salta aleatòriament 0 o 1 (segons la meva experiència). No podeu establir potenciòmetres addicionals, en el moment en què no hi estiguin implicats. O bé podeu posar i controlar la pàgina d’origen, potser l’autor publicarà el firmware actualitzat.
De fet, el joystick funciona com a divisor, desviant el mànec, canviem la tensió a la sortida mitjana del potenciòmetre i, en funció d’aquest voltatge, l’arzino determina la desviació.
[centre] [/ centre]
També es connecten els tumblers. Els interruptors de connexió són necessaris on-off, ja que el canal és discret i només té dos valors, 0 o 1, depenent de si la sortida de l’arduino és atreta a terra o a una font d’alimentació de 5 V. A més, cal que l’interruptor d’encesa sigui necessari, si deixeu la sortida “penjada a l’aire”, què passaria en utilitzar tres posicionals, el controlador no entén què està passant i el valor salta aleatòriament 0 o 1 (segons la meva experiència). No podeu establir potenciòmetres addicionals, en el moment en què no hi estiguin implicats. O bé podeu posar i controlar la pàgina d’origen, potser l’autor publicarà el firmware actualitzat.
A continuació, s’instal·la un arduino, un mòdul de ràdio i una placa d’alimentació de mòduls de ràdio. Com s'ha descrit anteriorment, cal establir-hi una tensió de 3,3 volts. És gairebé impossible fer-ho amb una resistència variable estàndard, per la qual cosa l’autor la va vendre i va soldar un retallador multi-torn. A continuació, es munta la pantalla i tots els components es connecten als terminals arduino segons el diagrama.
Firmware
Ja s’ha parlat del firmware d’Arduino 1000 vegades, en aquest moment, la capacitat de fer-ho tot mantenint un projecte arduino és tan important per defecte com la capacitat de mantenir una planxa a les mans mantenint alguna cosa per soldar.El codi per al transmissor, el receptor, les biblioteques necessàries i un fitxer per a la impressió 3D del cas es poden descarregar en un arxiu al final de l'article.
Receptor
Per al receptor, necessitareu una altra placa Arduino, un mòdul de ràdio (sense antena, la telemetria encara no està implementada aquí) i un estabilitzador de 3,3 volts. El receptor es solda al panell. La potència del receptor es realitza de la mateixa manera que la de qualsevol altre receptor de fàbrica, a partir d’una sortida especial del controlador de velocitat.

Pel meu compte, vull afegir que en lloc de l’antena estàndard d’aquest mòdul, és desitjable soldar la mateixa antena que hi ha instal·lada al mòdul amb un amplificador (només sense carcassa). Això no afectarà especialment l’interval de recepció, sinó que afectarà significativament la qualitat de la recepció depenent de la posició del model controlat en diferents plans. Per a receptors i emissors moderns, per a aquest propòsit, hi ha instal·lades fins i tot dues antenes, situades perpendiculars entre elles.
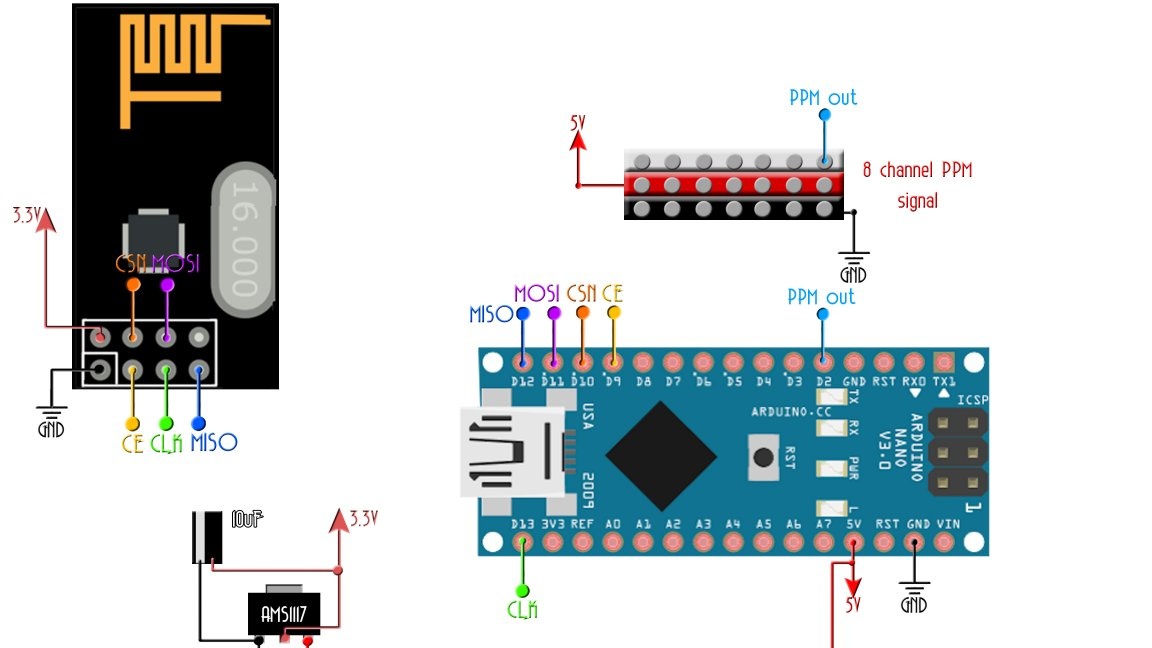
A més, l’autor ha implementat una funció molt important - sortida del senyal del receptor PPM. Esquemàticament, no canvia res, només cal que ompliu un altre firmware, el senyal PPM es produeix de la mateixa manera que a la majoria de receptors de fàbrica, des del primer canal (gas).
Això és tot. Personalment, m’ha agradat molt el projecte i, com ja he dit, preveu repetir-lo en el cas des del comandament a distància d’una joguina infantil. Al menú podeu seleccionar el mode de lineal a exponencial i afinar el valor de cada pal. Tingueu en compte que el valor mitjà de cada canal ha de ser 127.
Podeu descarregar tot el que necessiteu aquí.
Tot l’èxit a l’obra!