
L’assistent va crear un dispositiu que funciona com un nivell digital + regla + protractor + cinta mètrica. El dispositiu és prou petit com per adaptar-se a la butxaca i es pot carregar fàcilment la bateria mitjançant un carregador de telèfon.
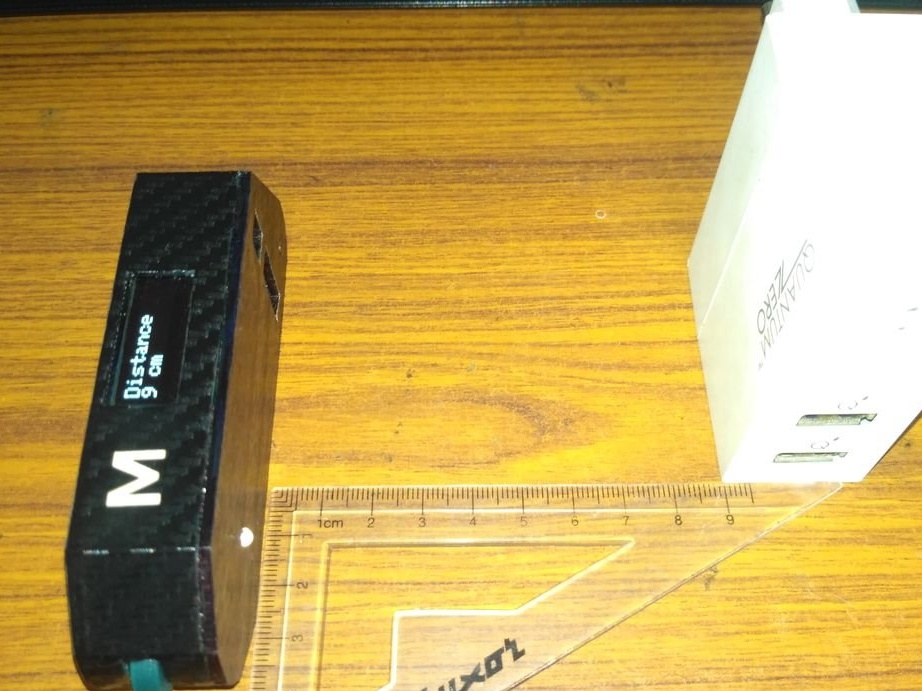
Aquest dispositiu utilitza un acceleròmetre i un sensor de giroscopi per mesurar el nivell i l'angle amb precisió, un sensor IR per a la mesura de contacte no de longitud lineal de 4 a 30 cm, un sensor amb una roda que es pot rodar al llarg d'una superfície corba o una línia corba per mesurar la longitud d'un objecte.
La navegació pels modes i funcions del dispositiu es realitza mitjançant els botons tàctils, designats com M (mode), U (unitat) i 0 (zero).
M: elecció entre diferents tipus de mesures
U: triar entre unitats de mesura mm, cm, polzades i mesurador
0 - Restableix els valors mesurats a 0 després de mesurar la distància o l'angle.
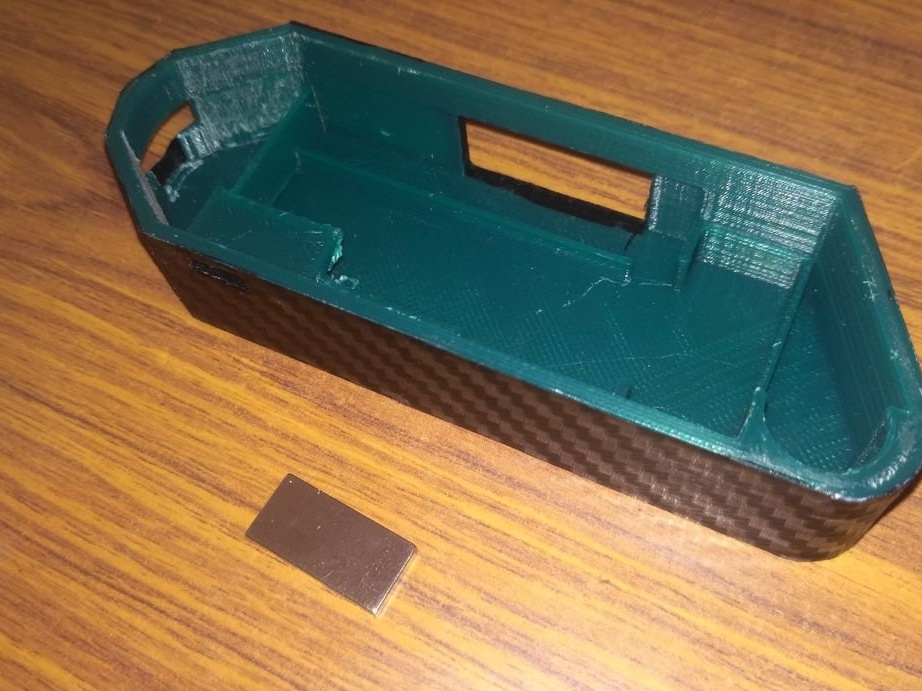
El dispositiu té un imant de neodimi integrat a la base perquè no rellisqui i no rellisqui de la superfície metàl·lica que es mesura.
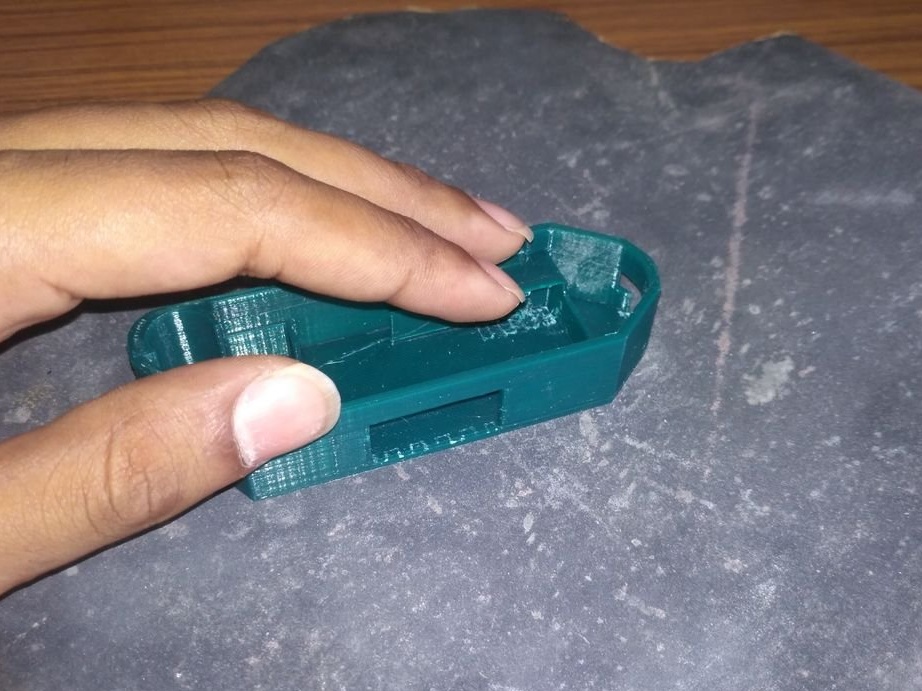
El estoig està dissenyat perquè el dispositiu sigui el més compacte possible.
Vegem un vídeo amb exemples de funcionament del dispositiu.
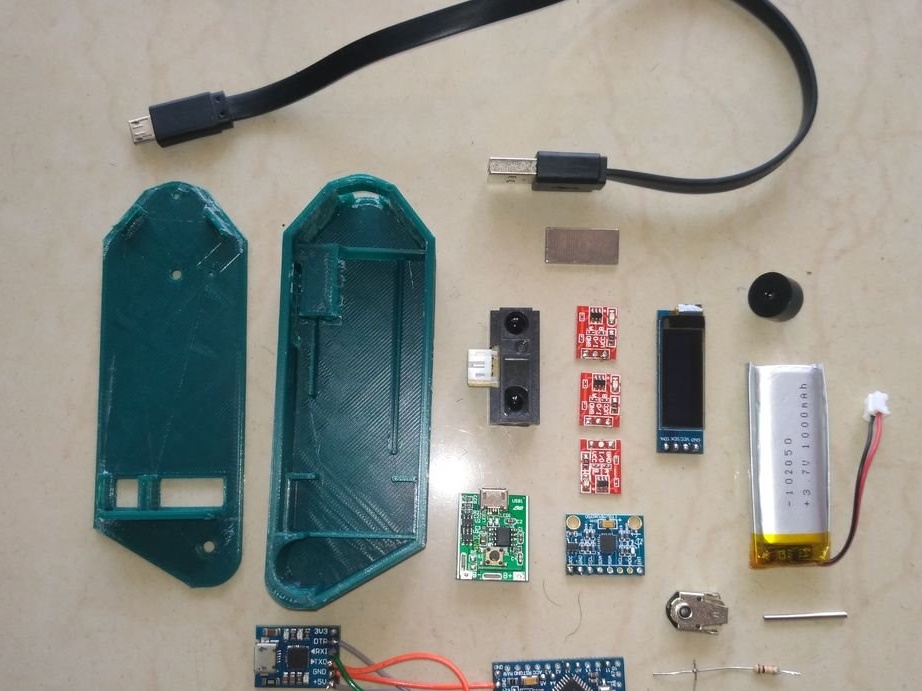
Eines i materials:
-Sensor de distància Sharp GP2Y0A41SK0F;
- Mòdul acceleròmetre / giroscopi MPU6050;
-Mòdul de càrrega;
Codificador
-128 X 32 pantalla OLED;
-Arduino pro mini ATMEGA328 5 V / 16 MHz;
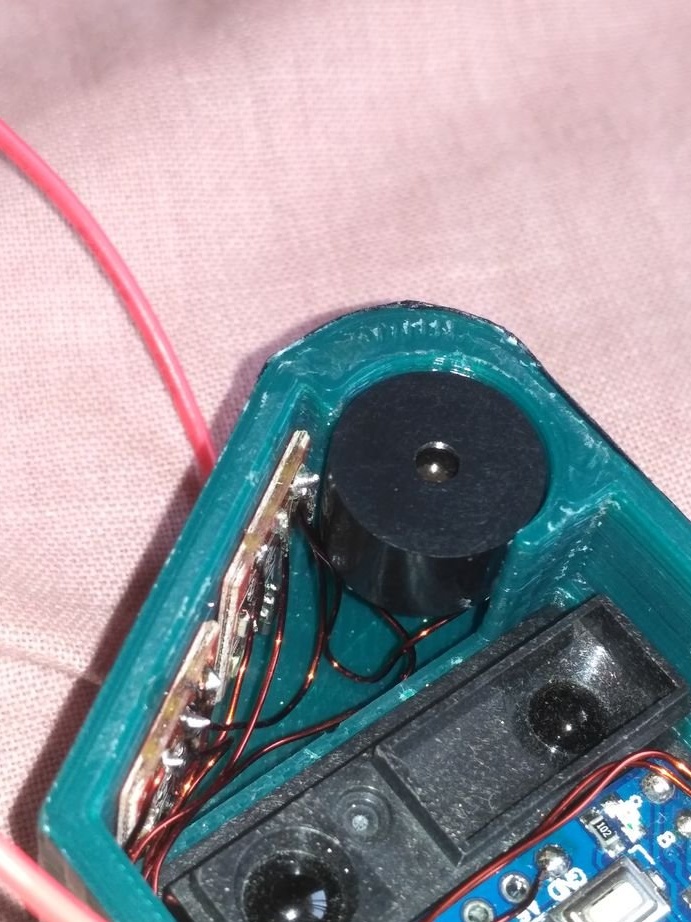
-12 mm de timbre;
-3,7 V, bateria de polímer de liti de 1000 mAh;
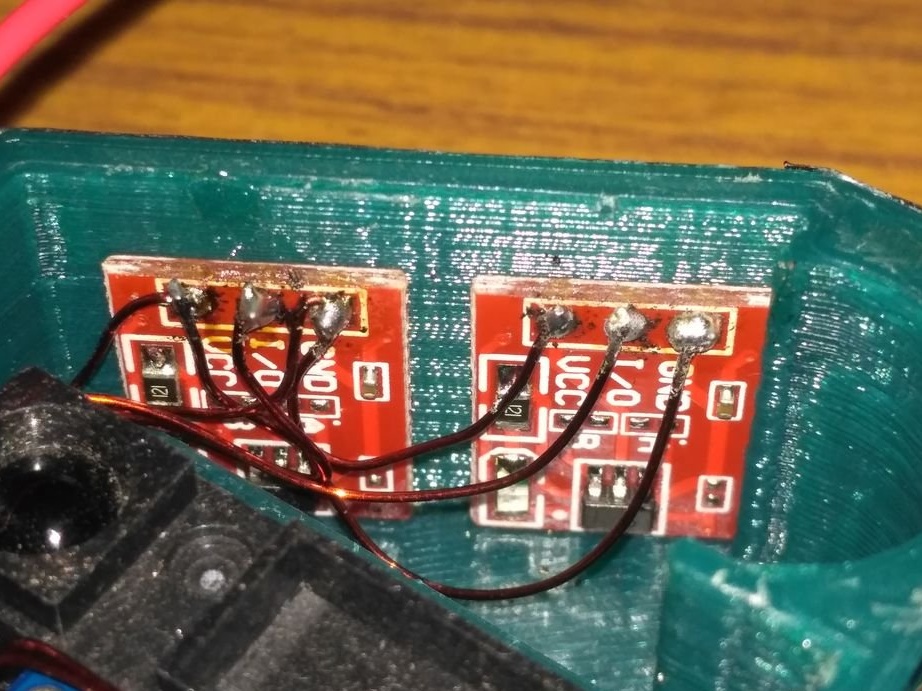
- Mòdul de botons tàctils TTP223 - 3 peces;
- Imant de neodim 20x10x2 mm;
-Interfície de conversor CP2102;
Fil de coure esmaltat;
-Resistors 10K - 2 unitats;
- Vareta d’acer de 19 mm de llarg amb un diàmetre de 2 mm;
-LED LED;
-Vinil film;
- Cable micro USB;
- tisores;
-Noix;
- pinces;
-Pistola de vidre;
-Super-cola;
-Accessoris de venda;
-Talla talladora;
- Impressora 3D;
-Nippers;
-Residu de paper;

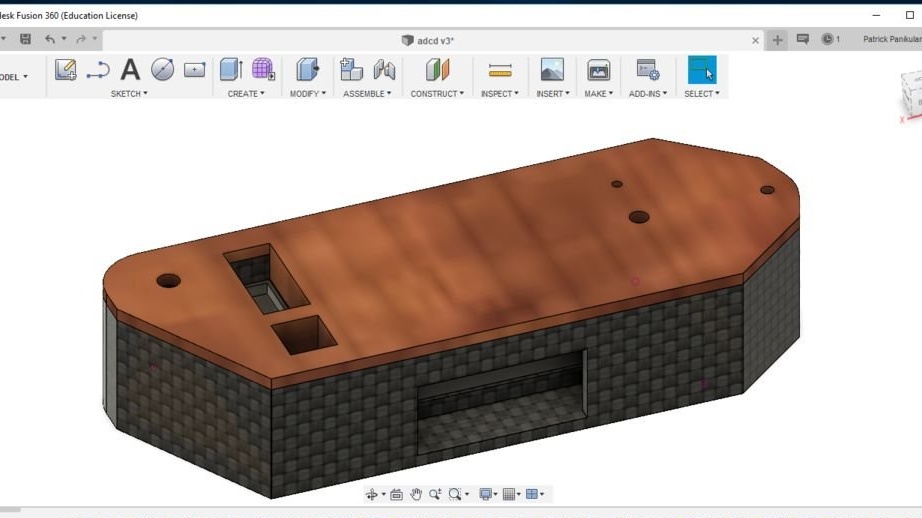
Primer pas: El cas
Primer, l'assistent imprimeix un cas en una impressora 3D. A continuació, es poden descarregar els fitxers per imprimir.
CORP.stl
Lid.stl
roda.stl
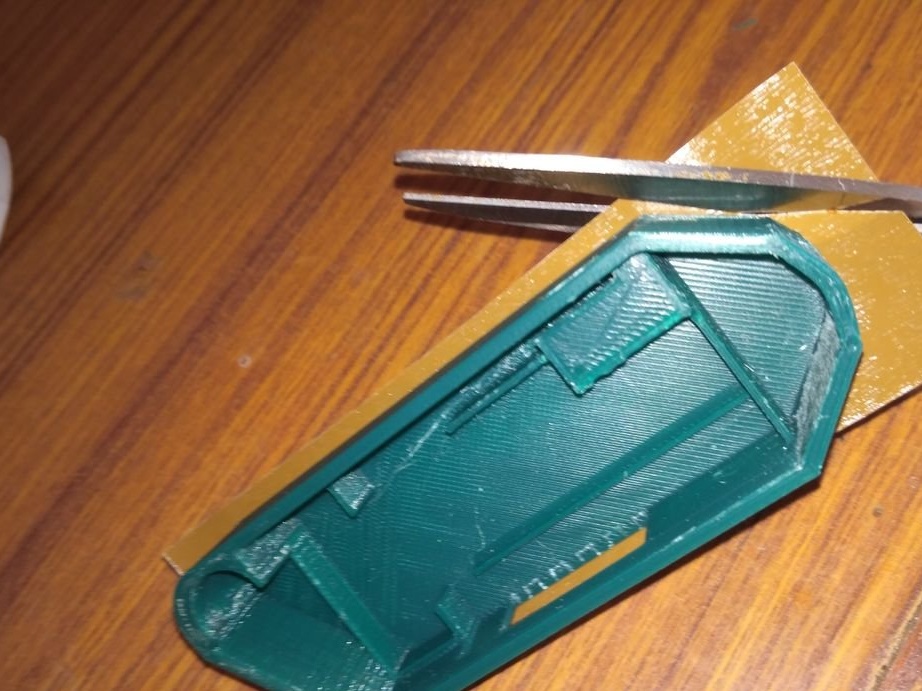
Es pega el estoig amb film de vinil, prèviament poliment de la seva superfície.







Segon segon: Esquema
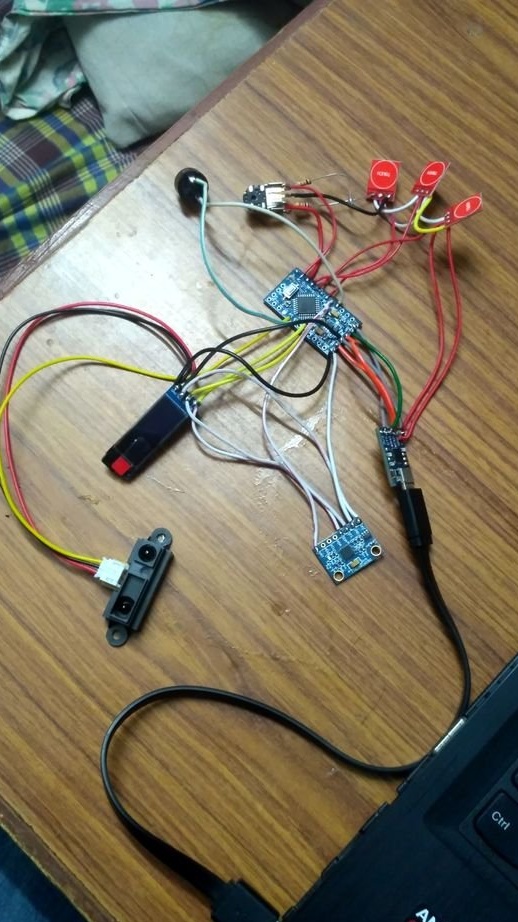
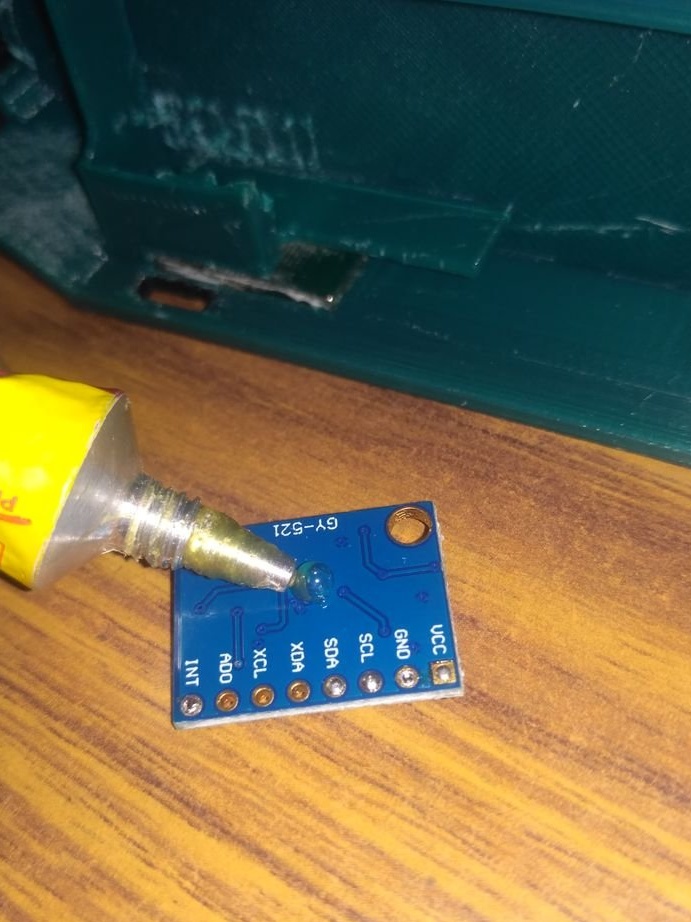
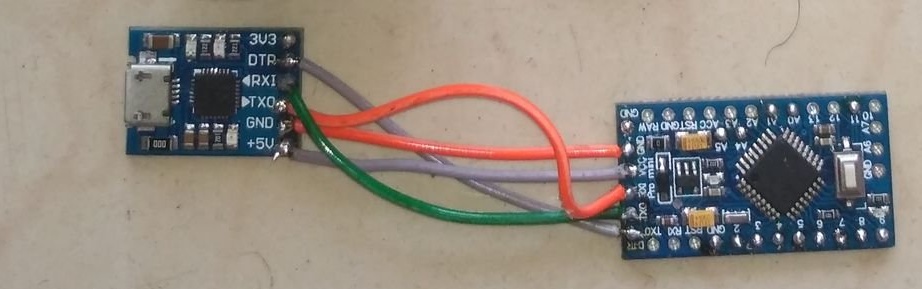
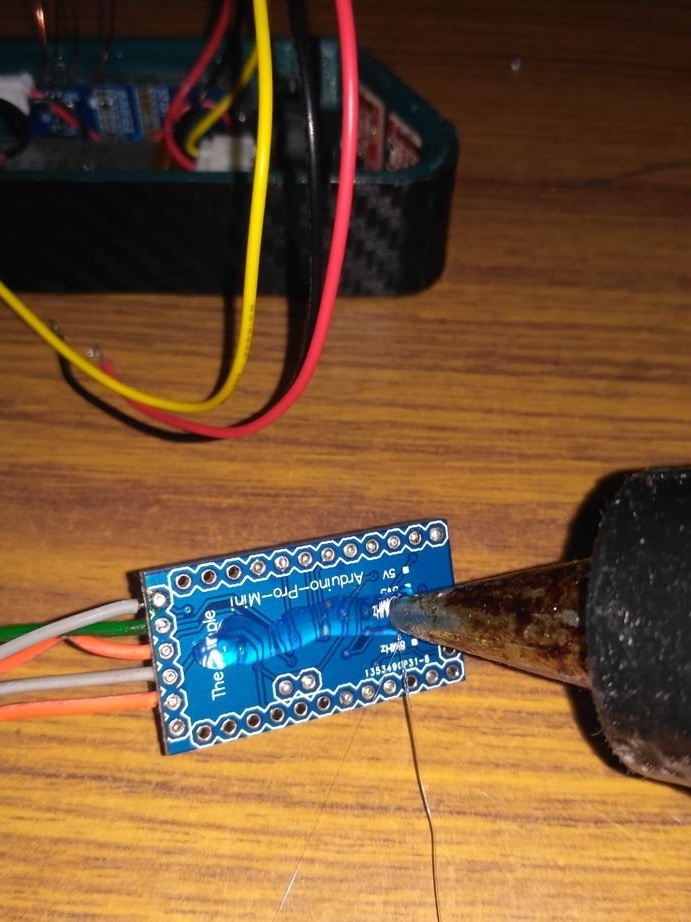
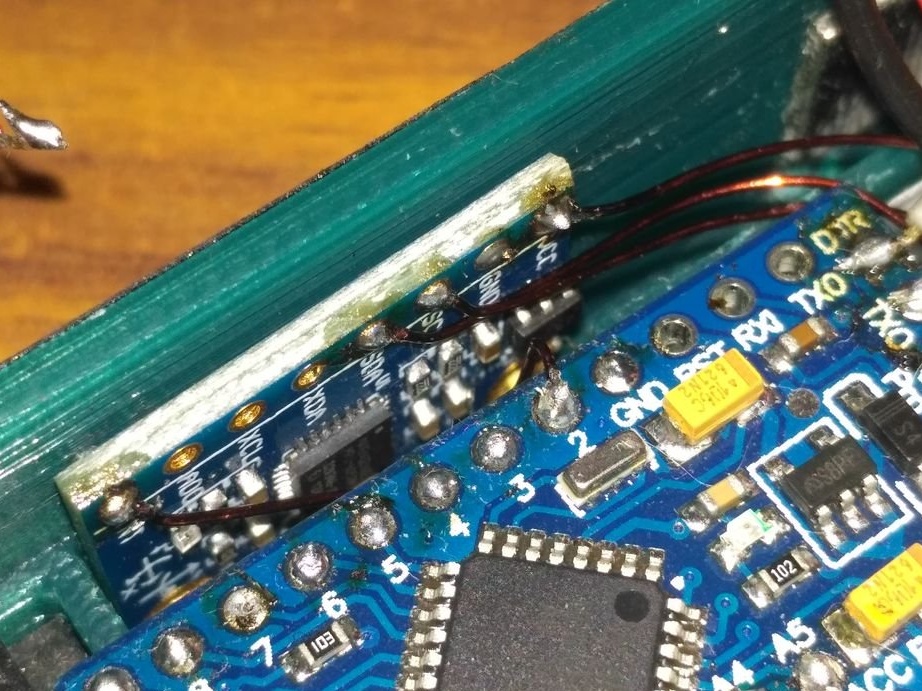
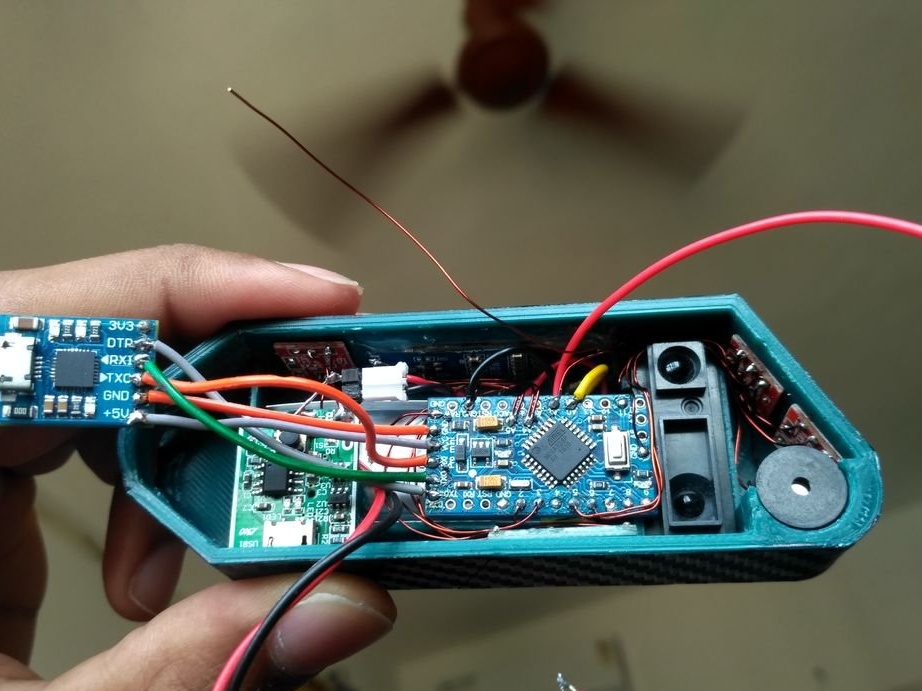
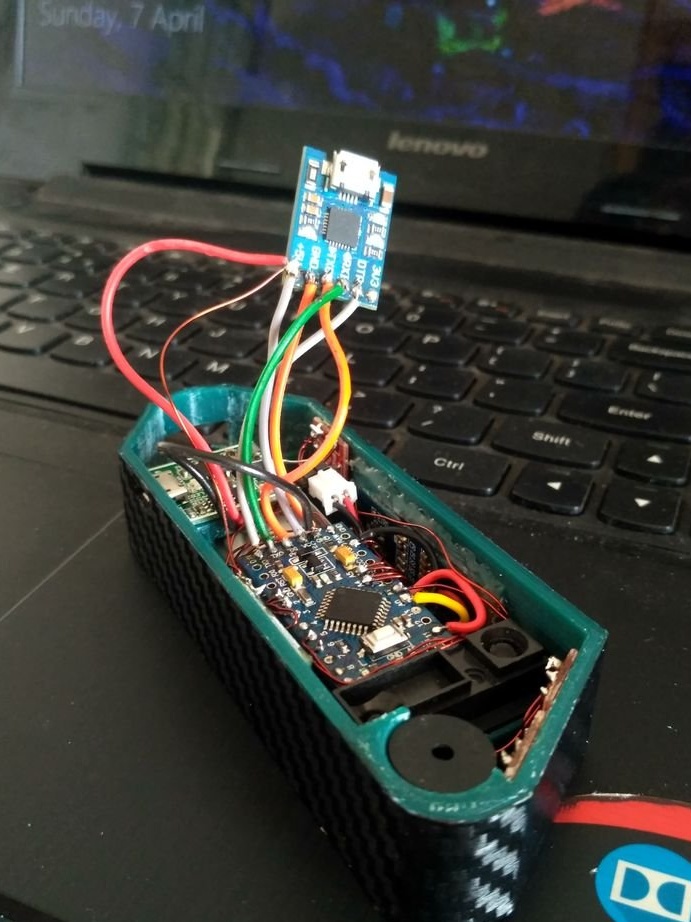
A diferència Arduino Nano, pro mini no es pot programar directament connectant un cable USB. Per tant, primer heu de connectar un USB extern al convertidor pro mini per programar-lo. La primera foto mostra com s’han de fer aquestes connexions.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
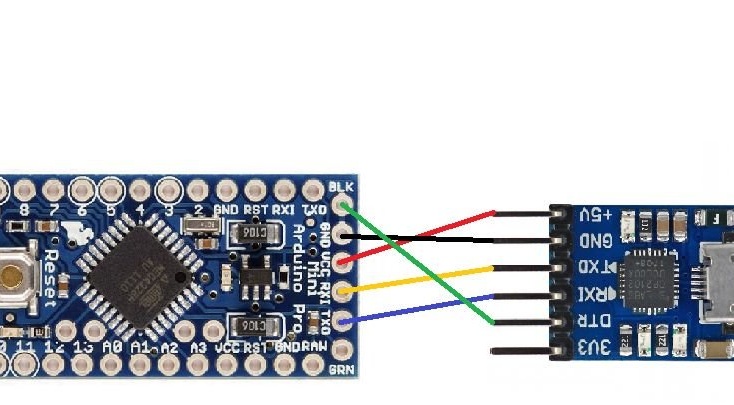
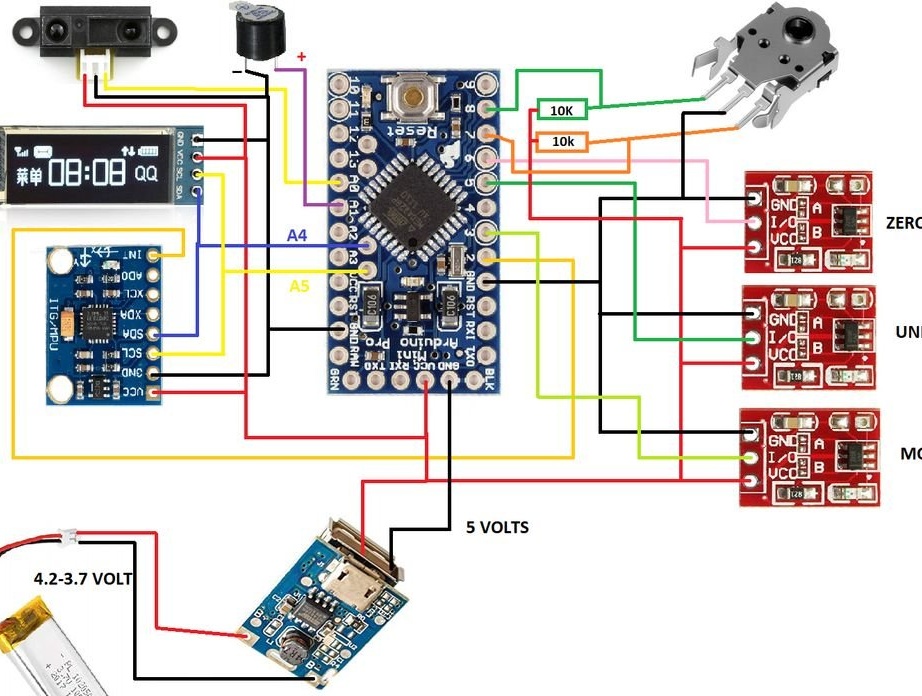
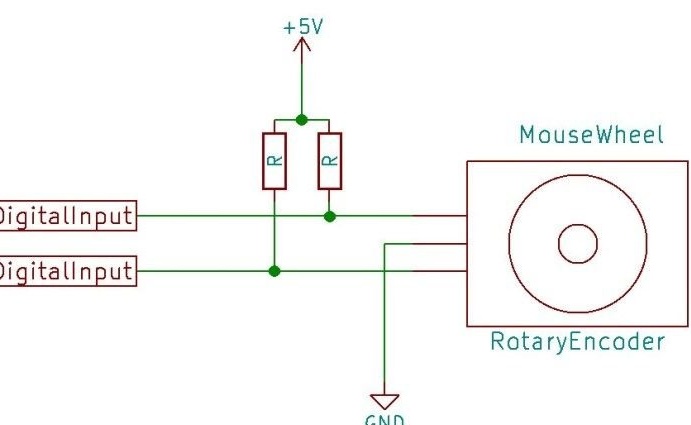
La segona imatge mostra el diagrama de circuit complet d’aquest projecte.
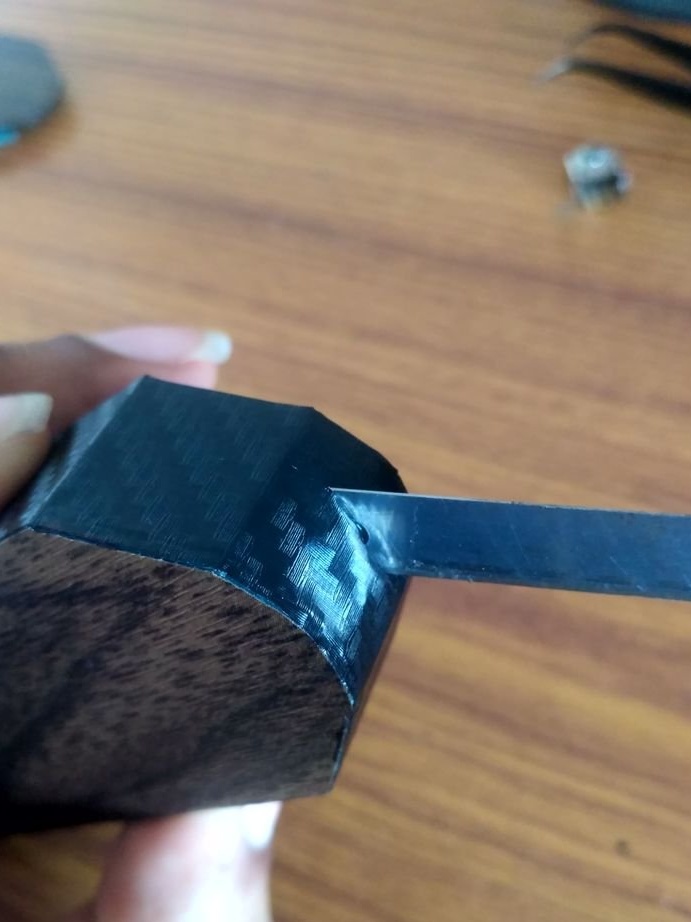
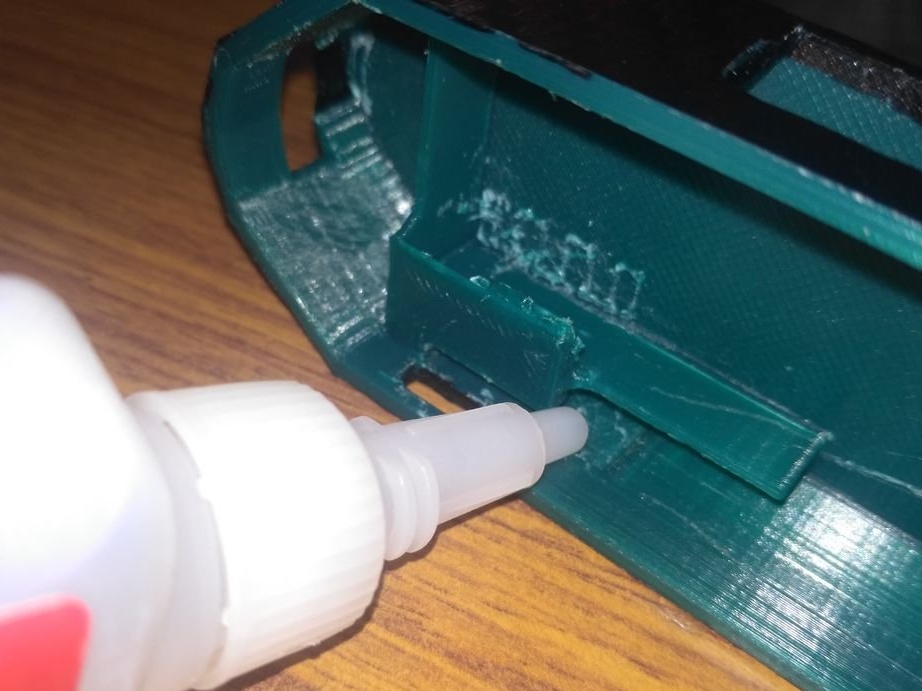
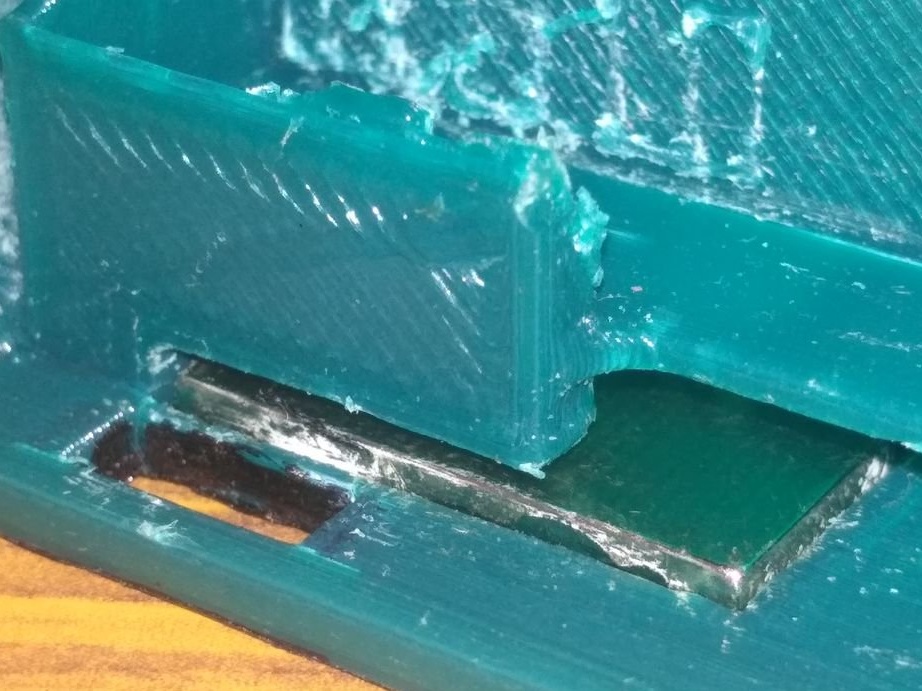
Tres Pas: Imant
Enganxa l’imant al cos.

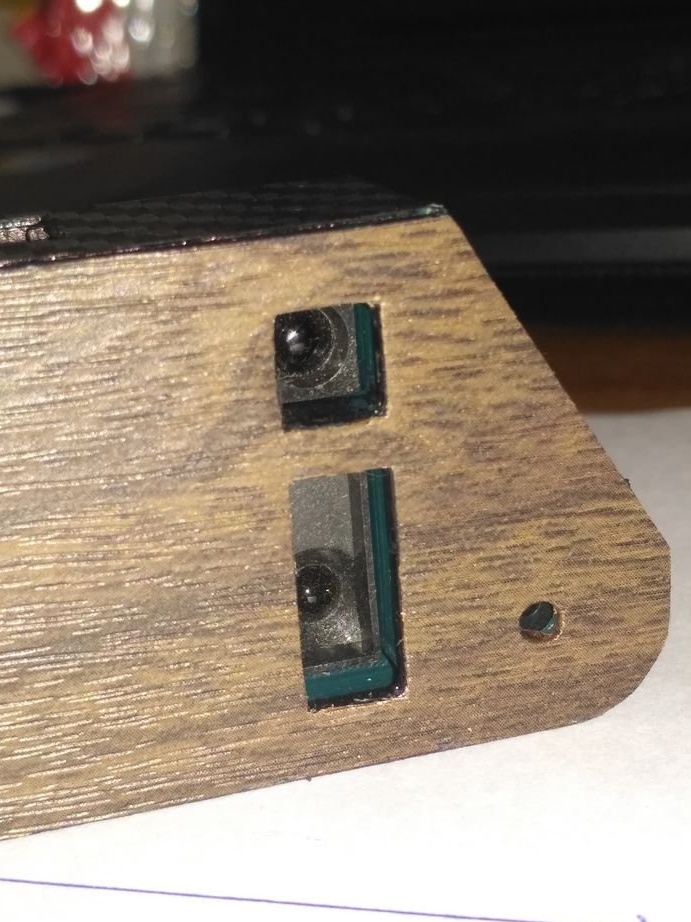
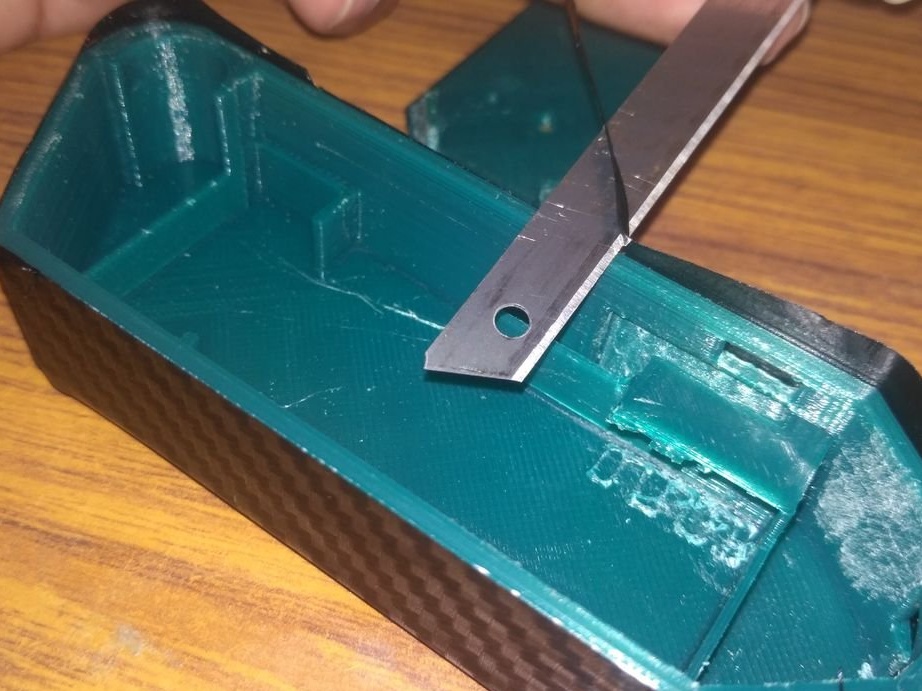
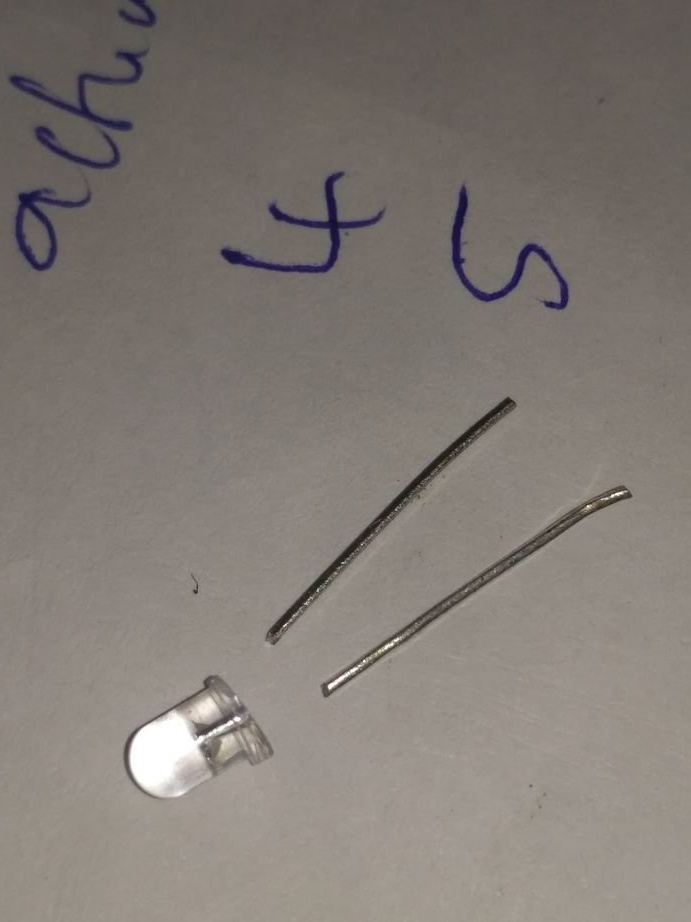
Quatre pas: Alineació del sensor
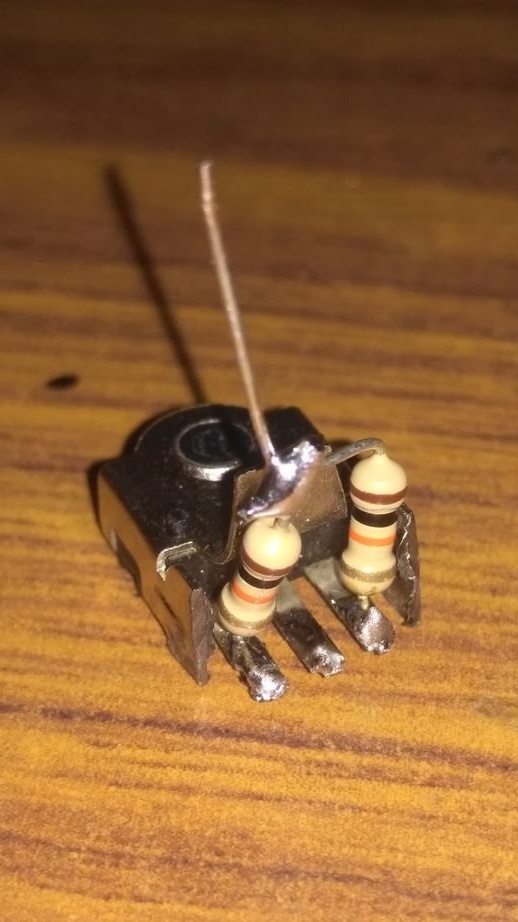
Per reduir la mida, el sensor i el codificador IR es tallen.






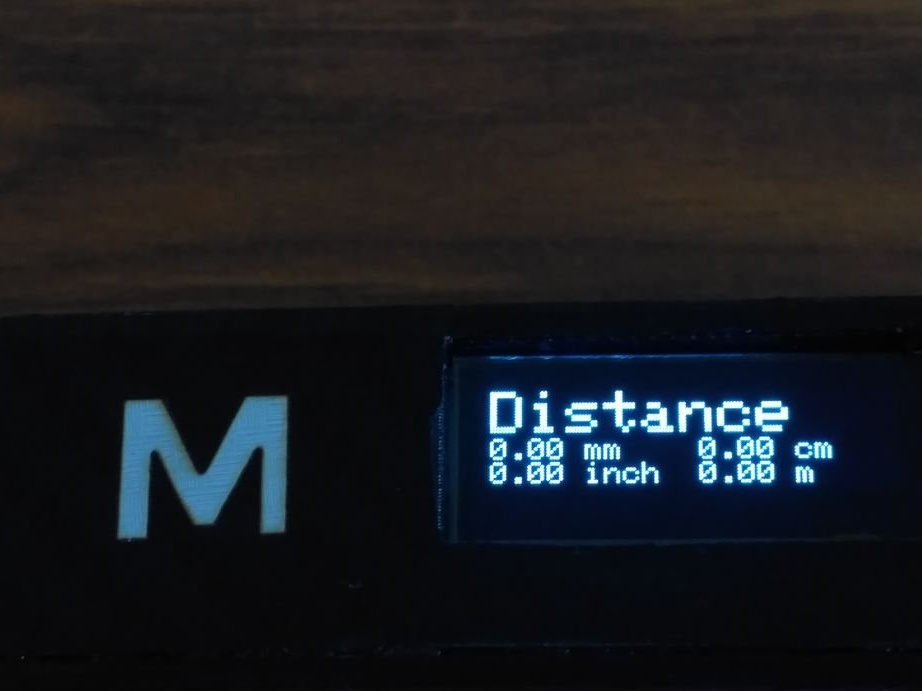
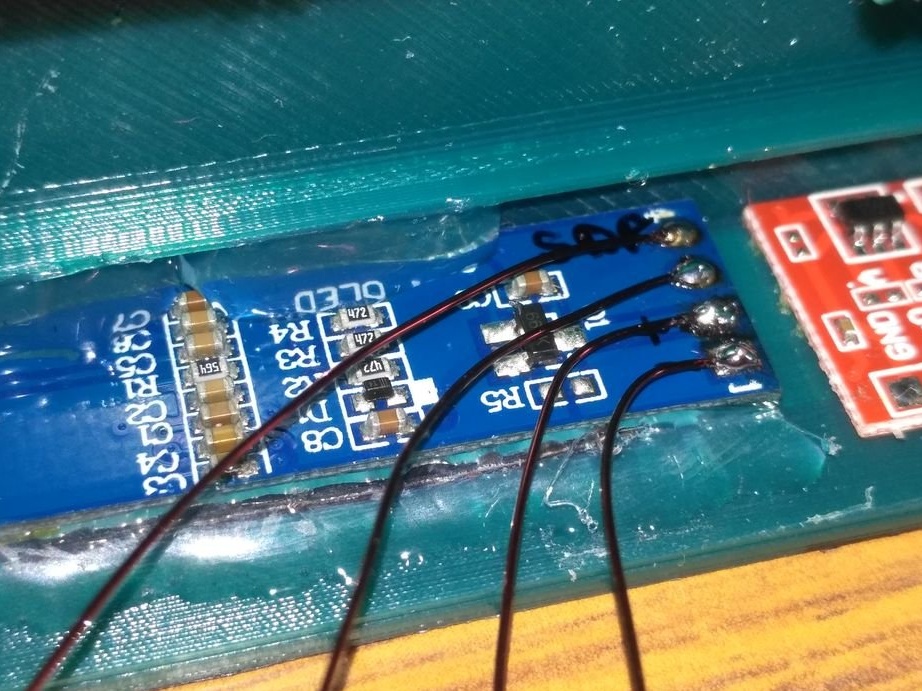
Cinquè pas: Visualització
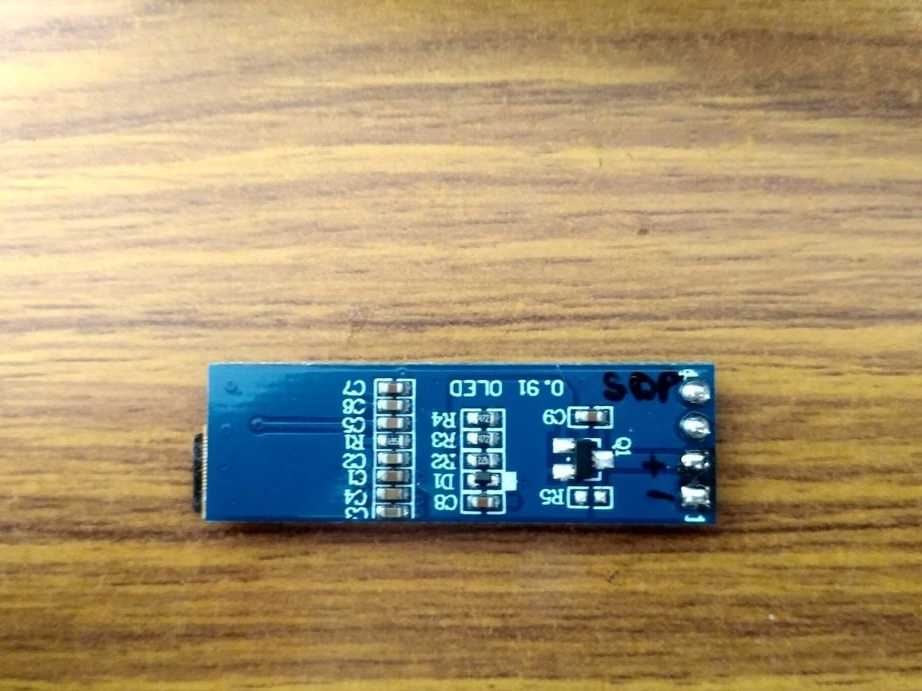
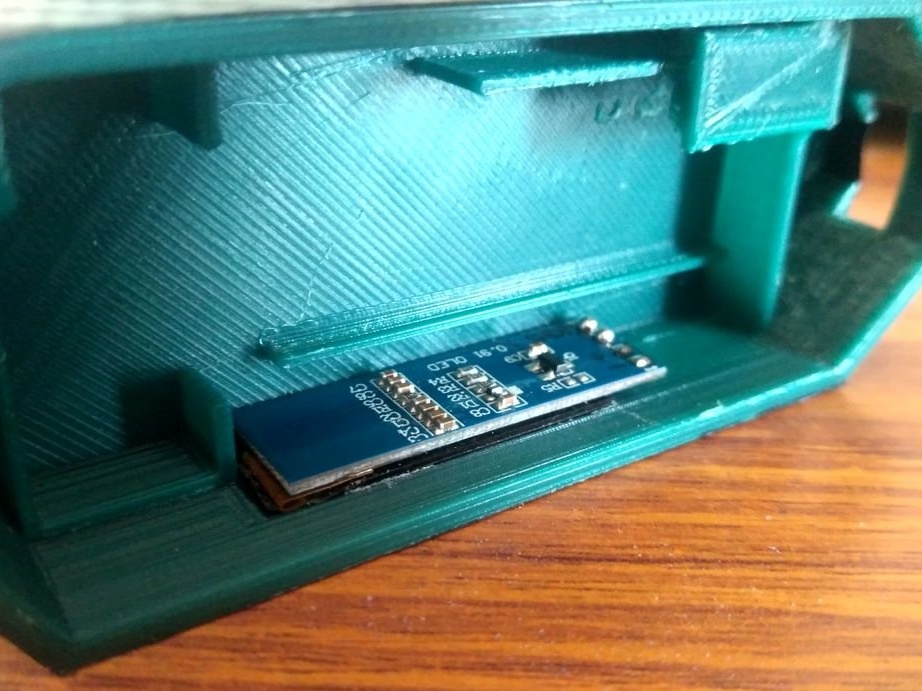
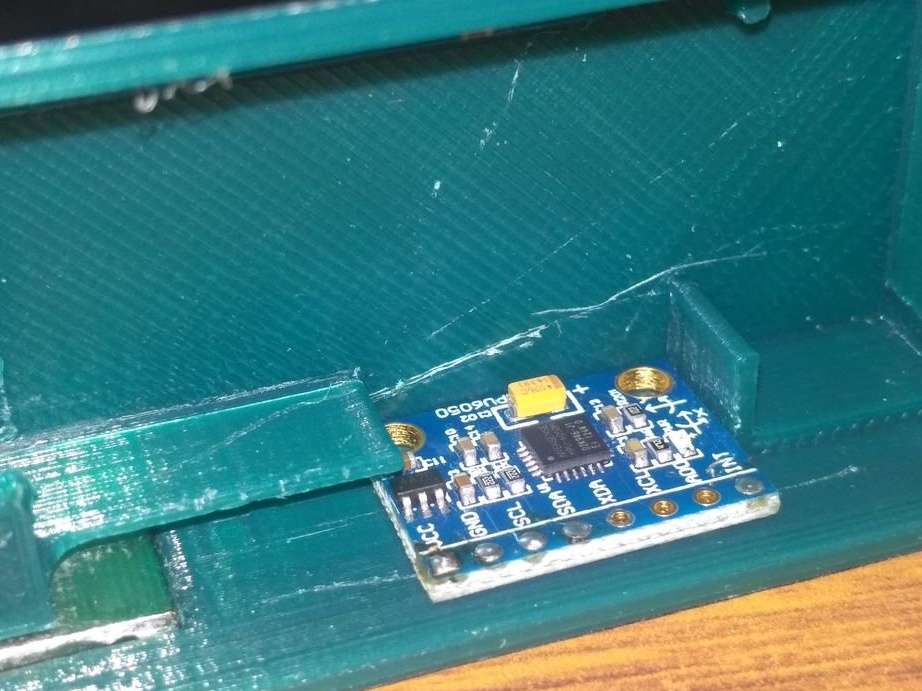
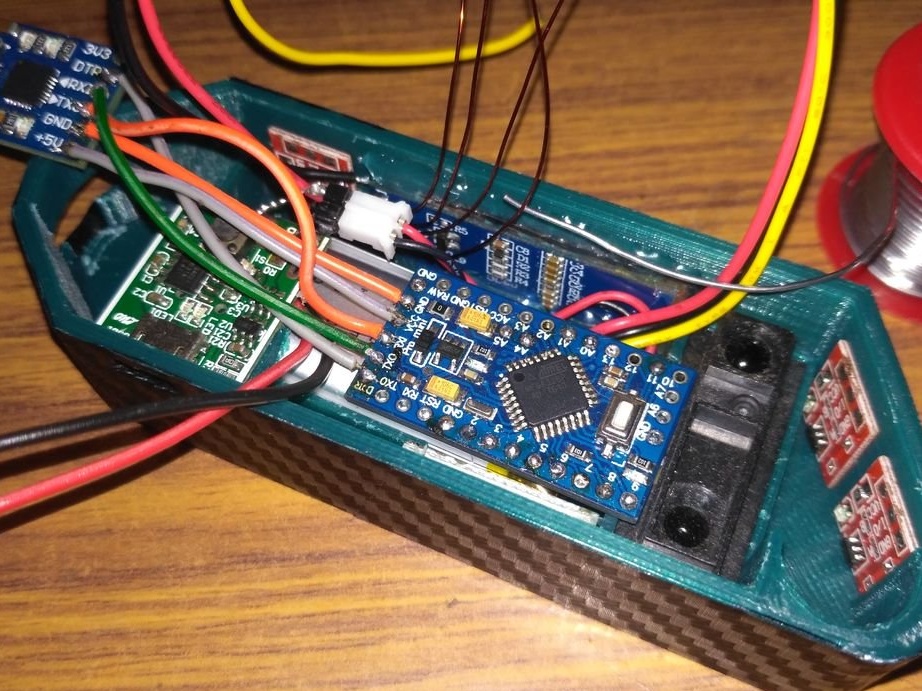
Marca els noms dels contactes a la part posterior de la pantalla OLED de manera que posteriorment podeu fer les connexions correctes. Configura la pantalla OLED a la posició correcta, tal com es mostra a la segona figura. Arregla la pantalla amb cola calenta.

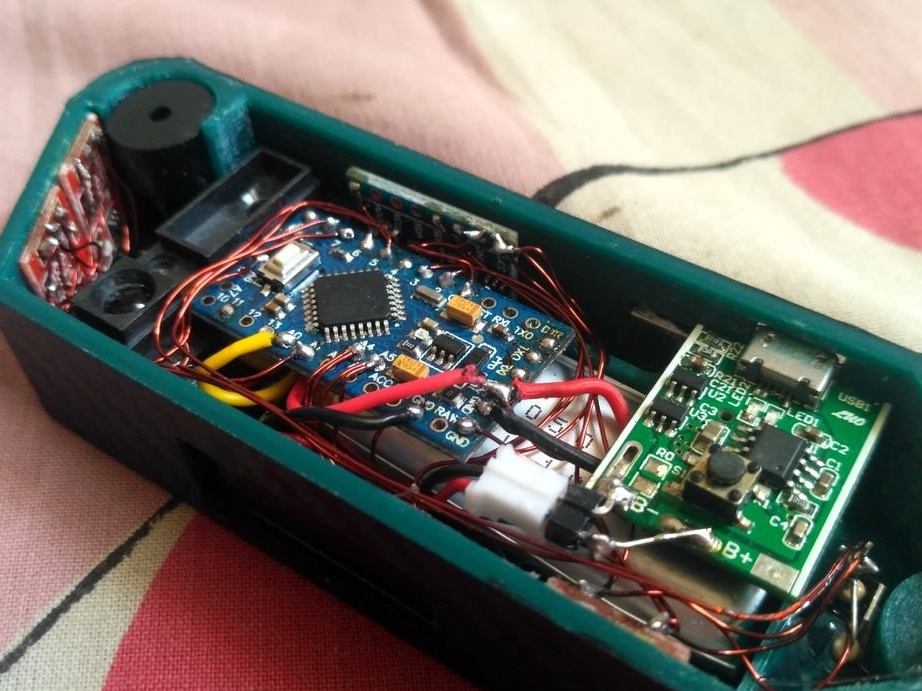
Pas sisè: mòduls
S'enganxa el mòdul del sensor i MPU6050.


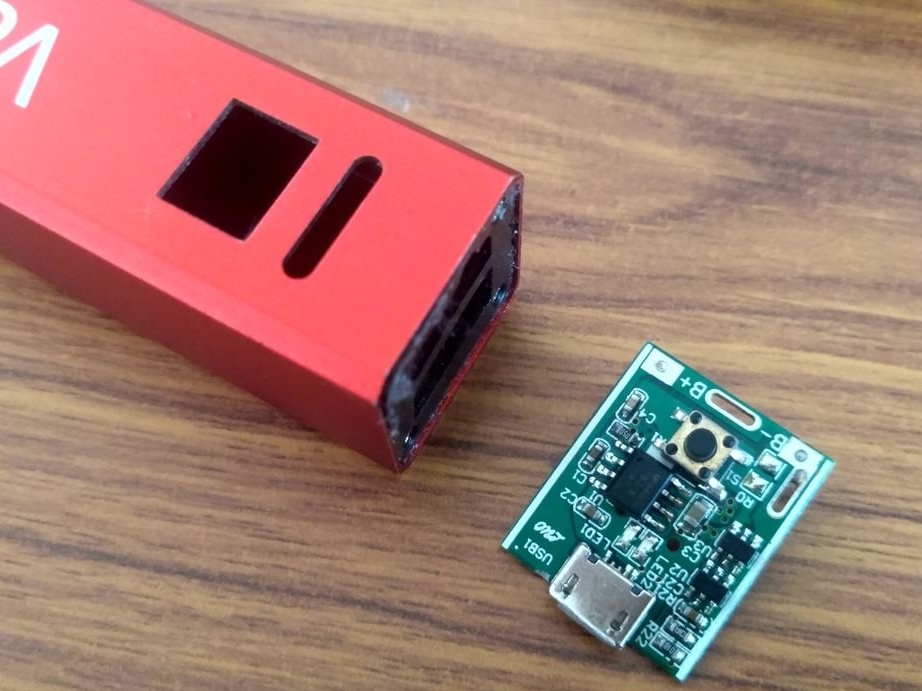
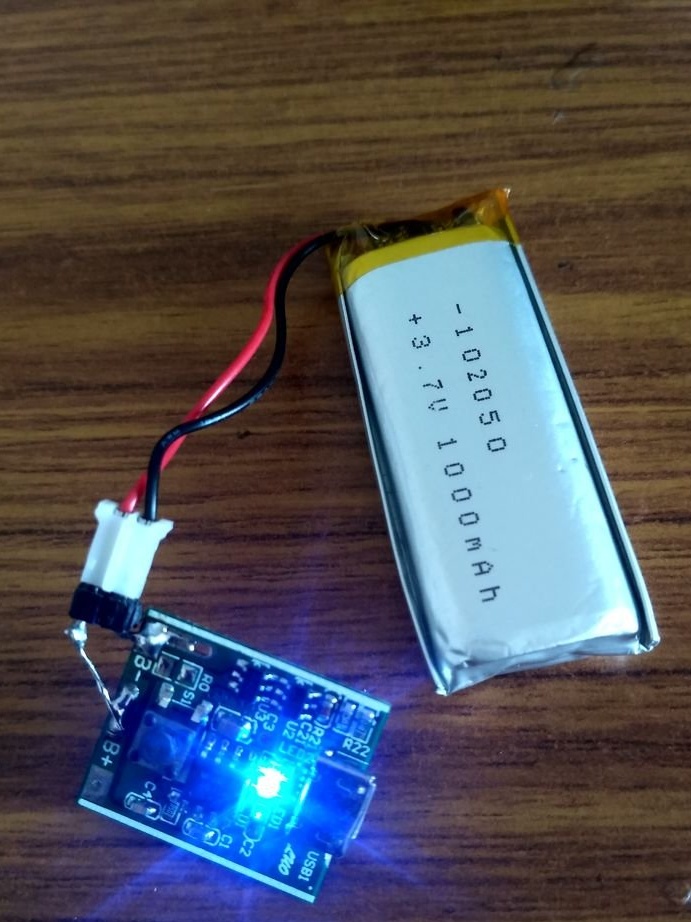
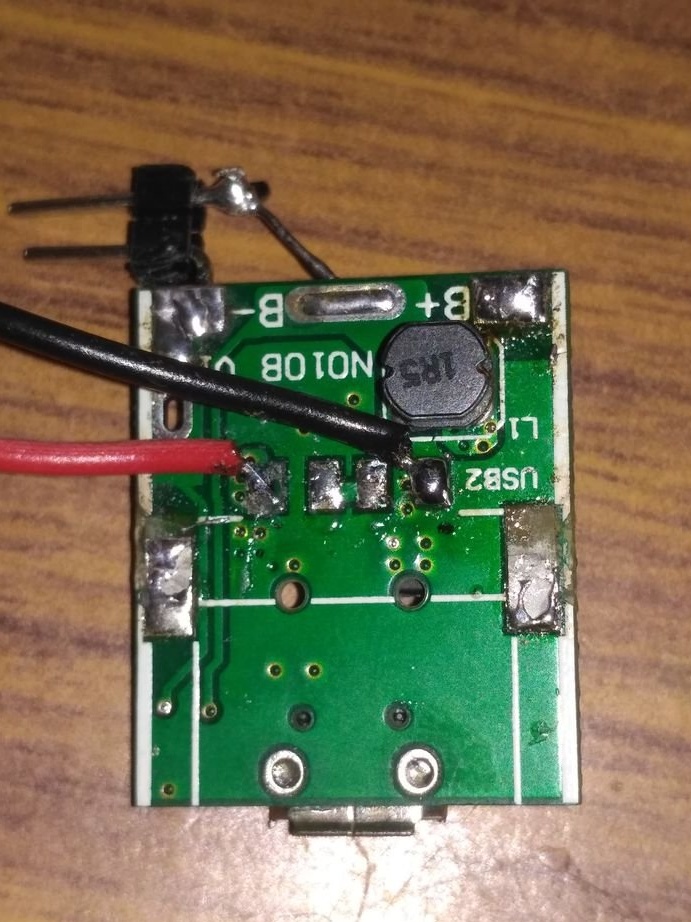
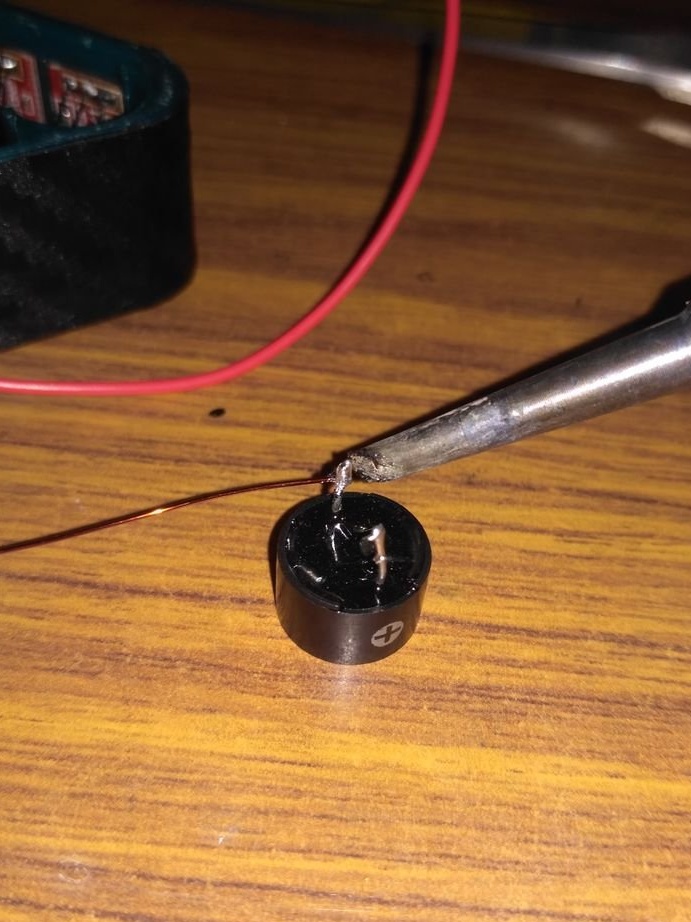
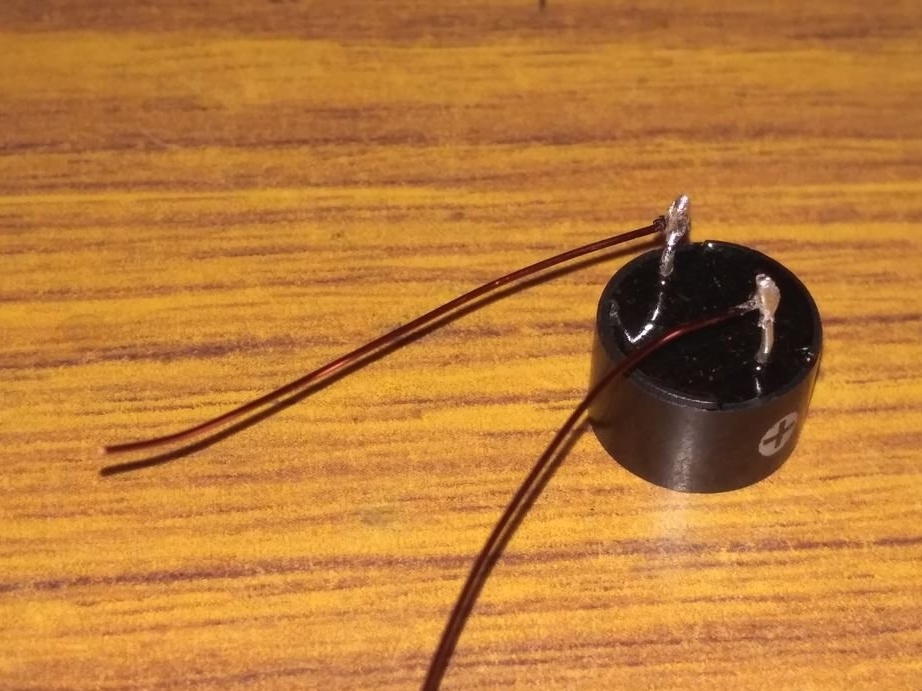
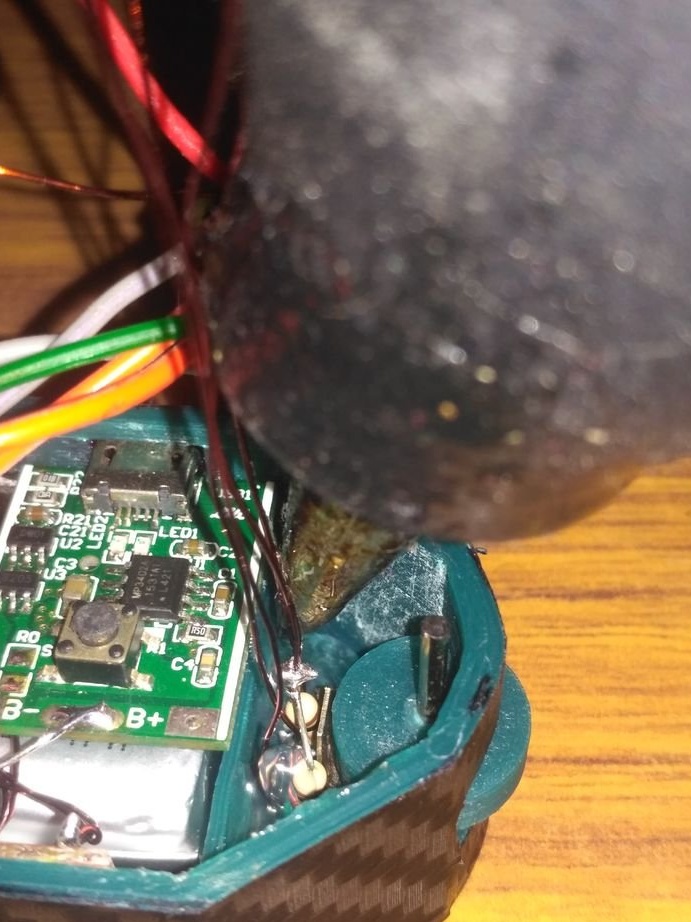
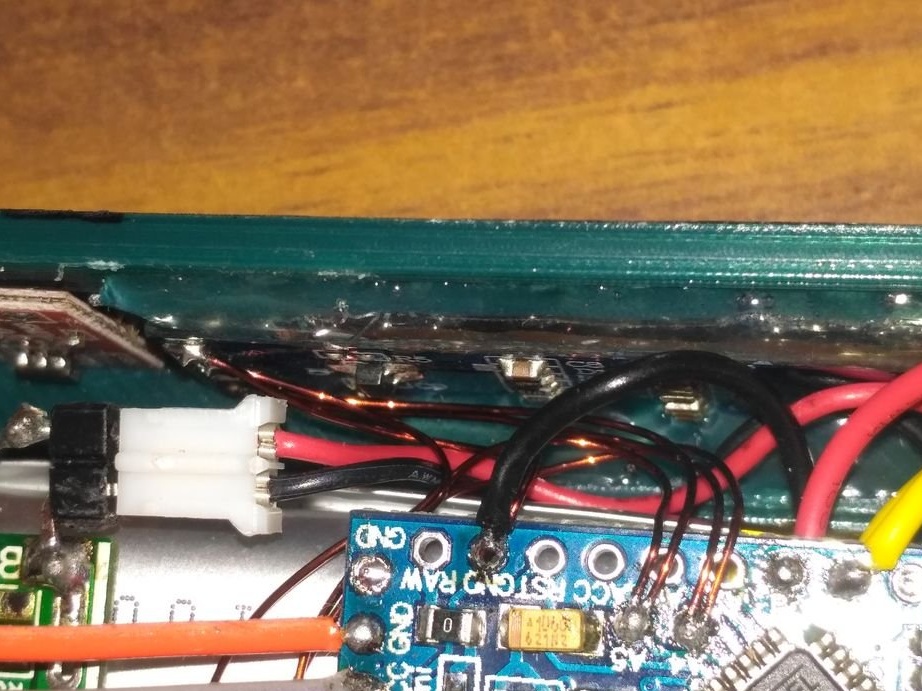
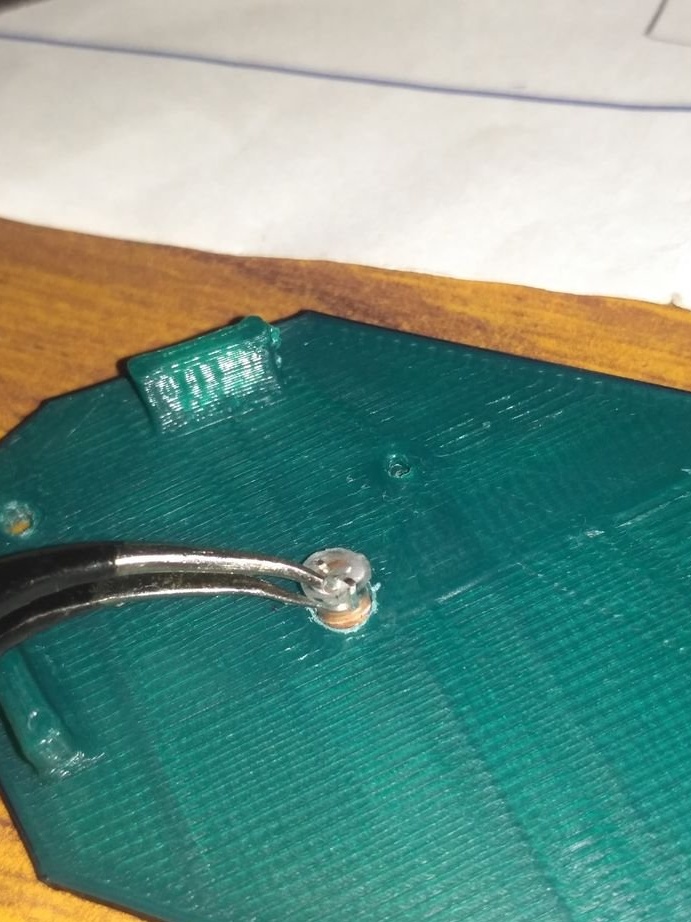
Setè pas: mòdul de càrrega i bateria
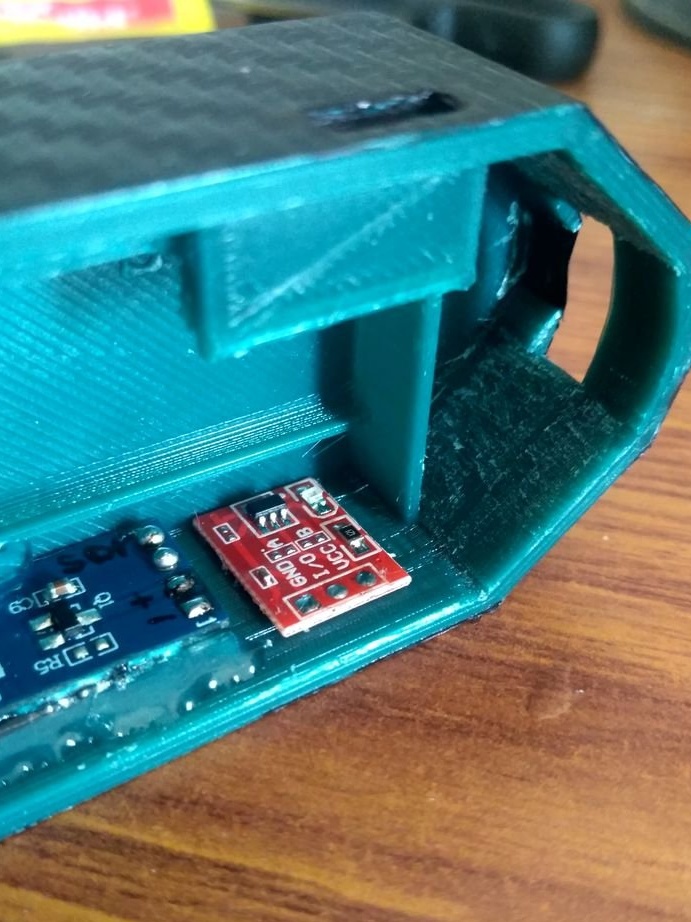
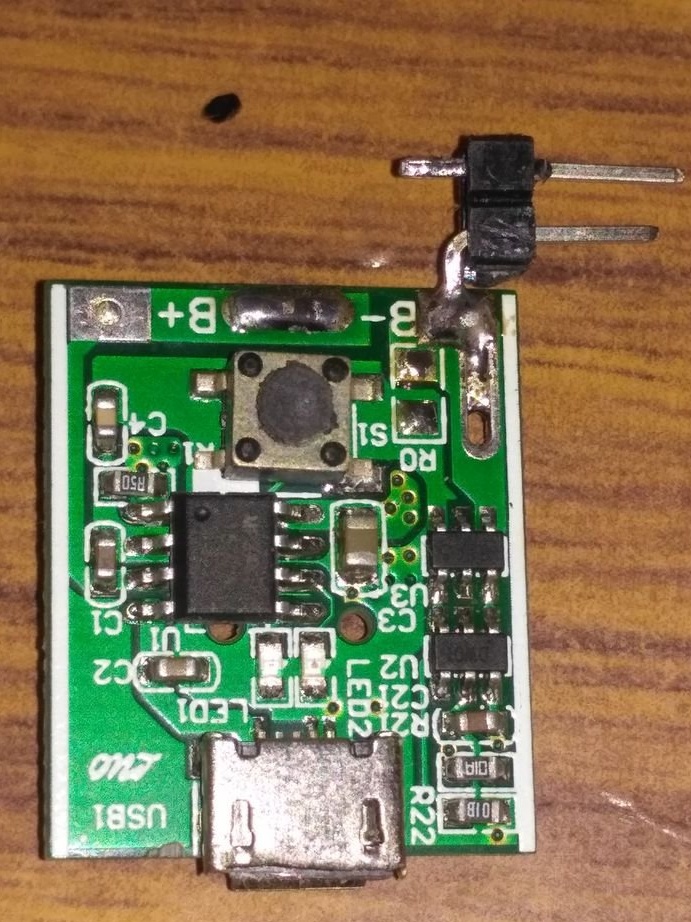
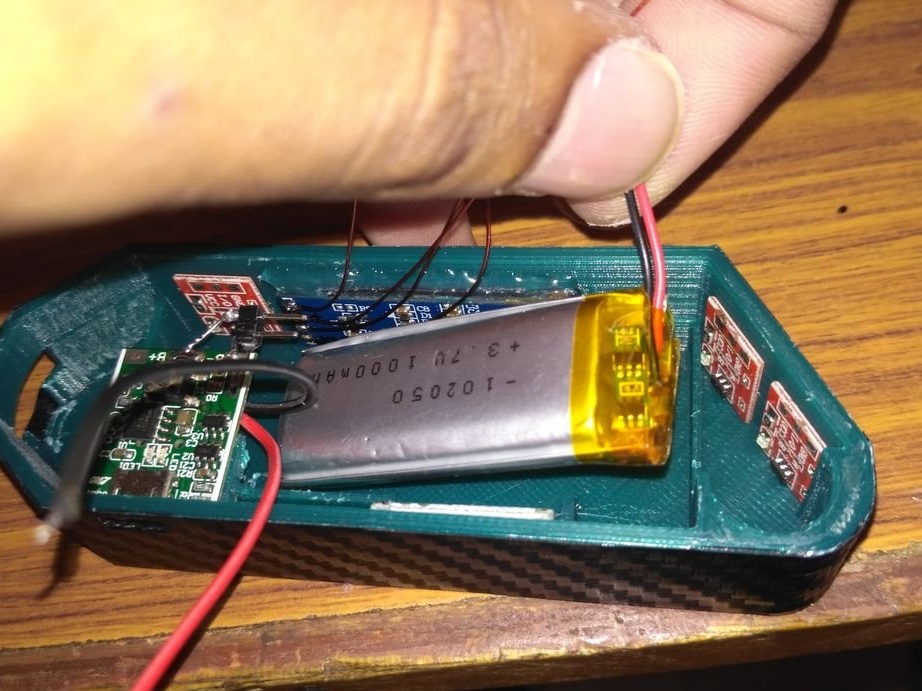
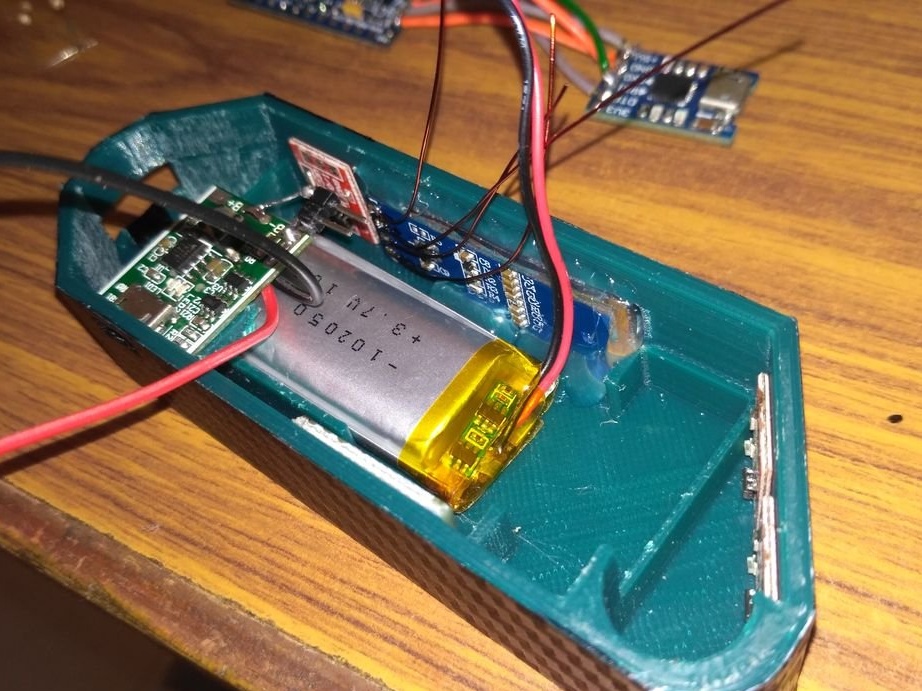
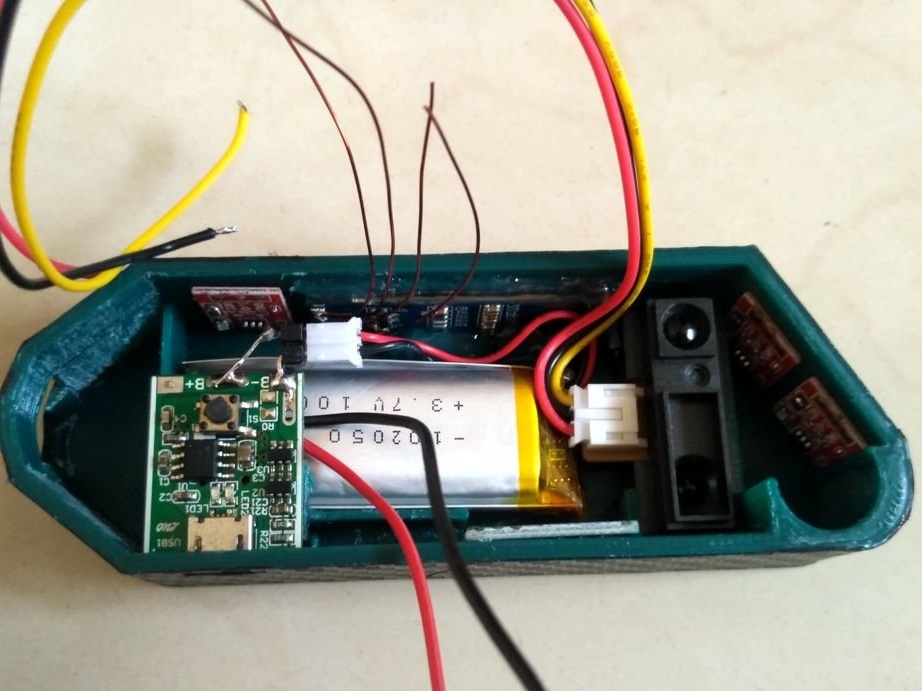
Aquest mòdul disposa tant d’un circuit de protecció de bateries com d’un convertidor d’impulsió de 5 V, 1 A. També té un botó d’encesa / apagat que es pot utilitzar com a interruptor d’alimentació. El port de presa USB del mòdul es va treure amb una planxa de soldadura, i es van soldar dos cables als terminals + 5 V i terra, tal com es mostra a la quarta foto.
A continuació, cal soldar els 2 connectors de connexió a B + i B-, tal com es mostra a les dues primeres fotos i, a continuació, comprovar si el mòdul funciona amb la bateria.
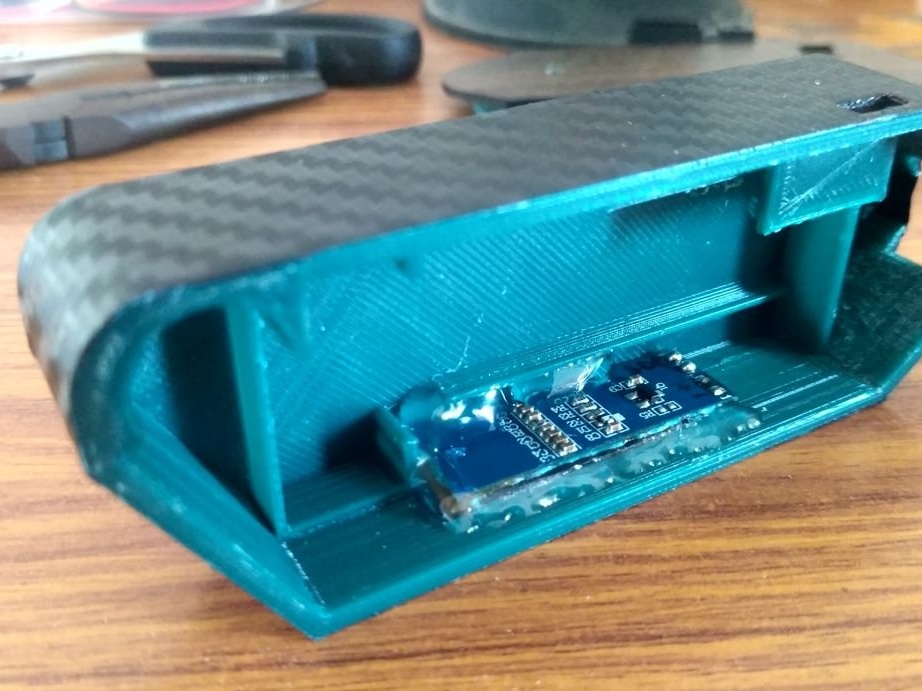
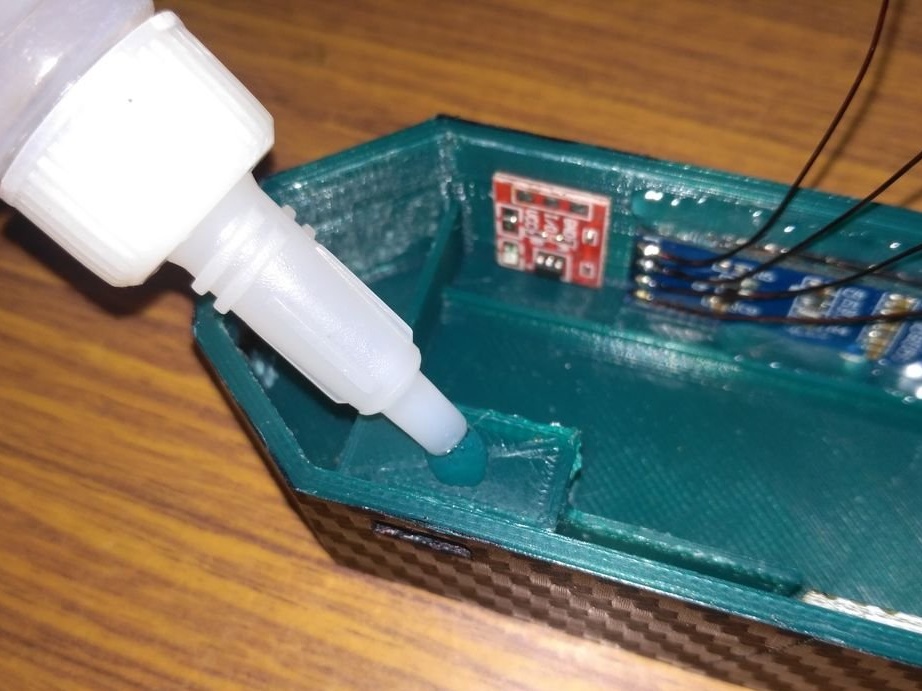
Ara cal aplicar cola a la plataforma prevista per al mòdul i col·locar amb cura el mòdul, assegurant-se que el port de càrrega i el forat estan instal·lats exactament als forats.

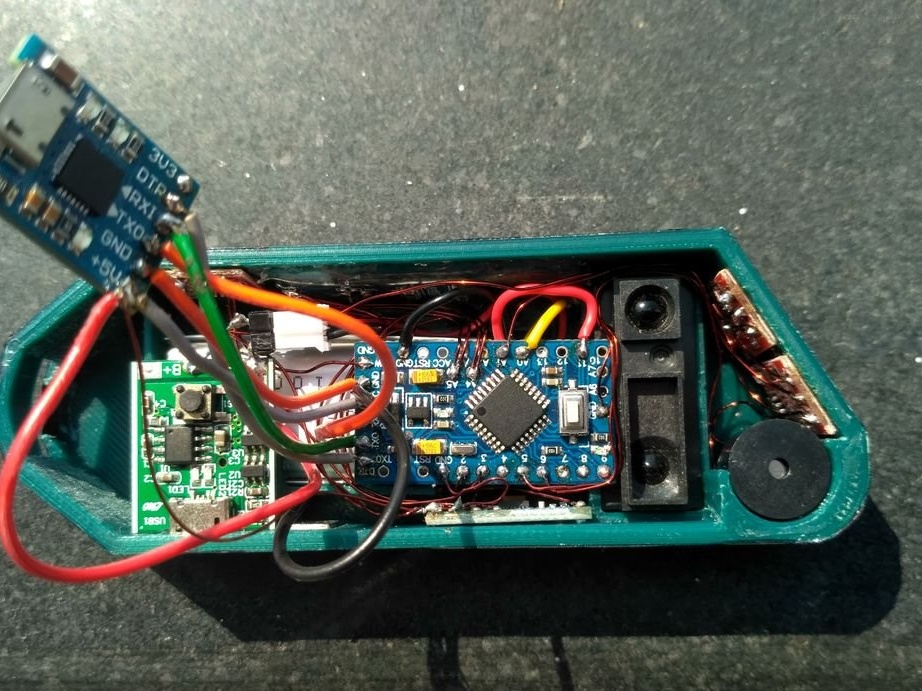
Pas vuit: Instal·lació de la bateria i del sensor IR
Cables de soldadura als pins de visualització. Instal·la la bateria i el sensor d’IR.

Nou pas: mòdul de bateria i càrrega
Segons l’esquema, munta el mòdul de càrrega i el timbre.

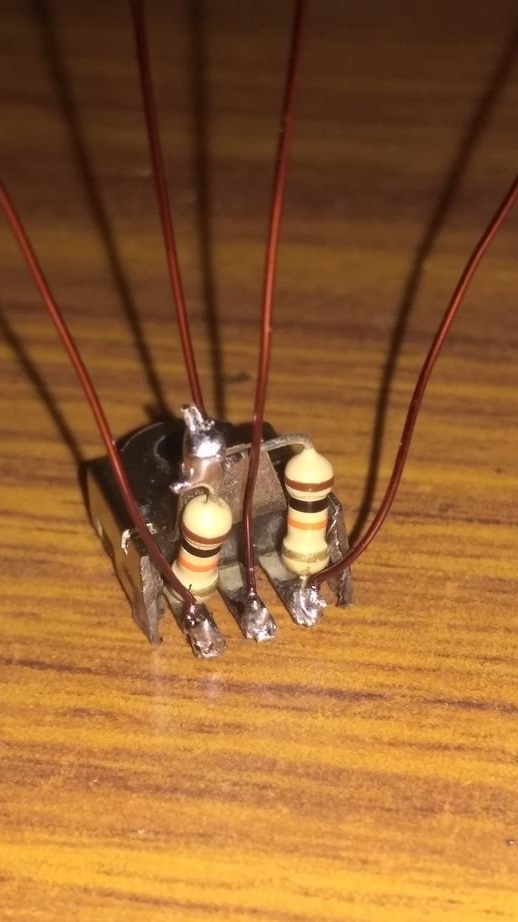
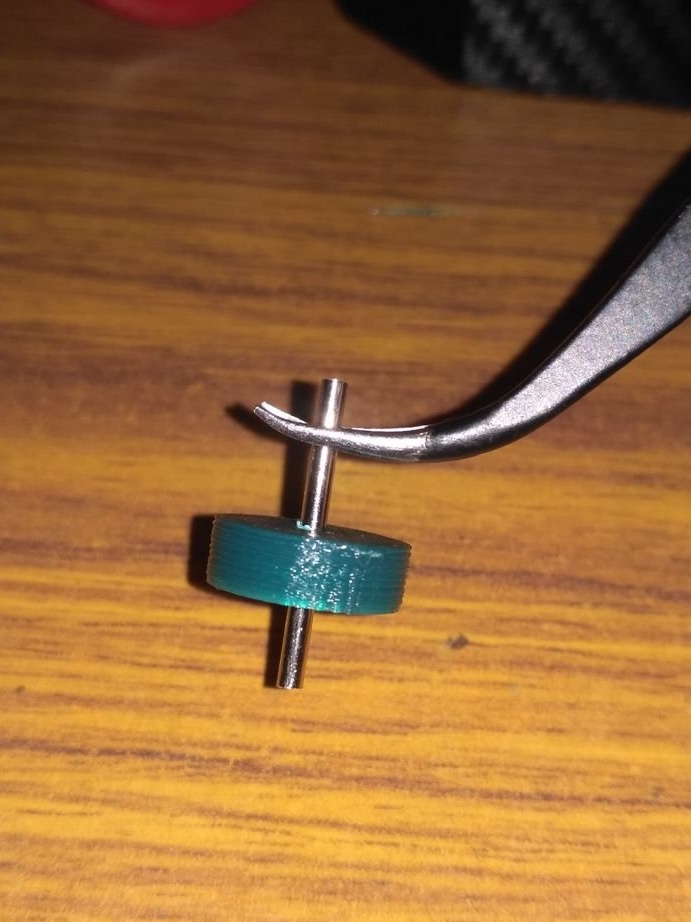
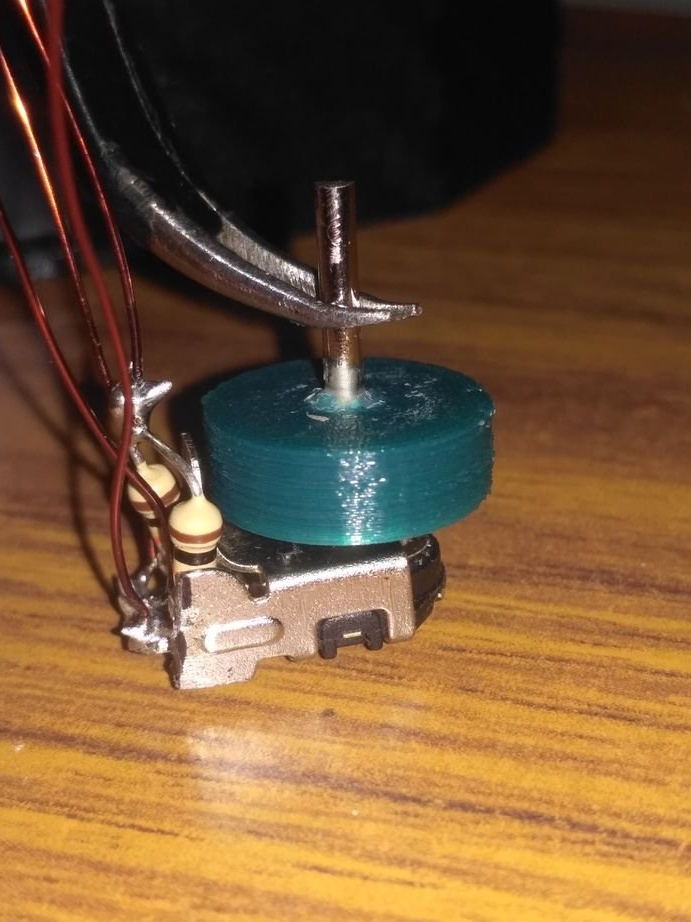
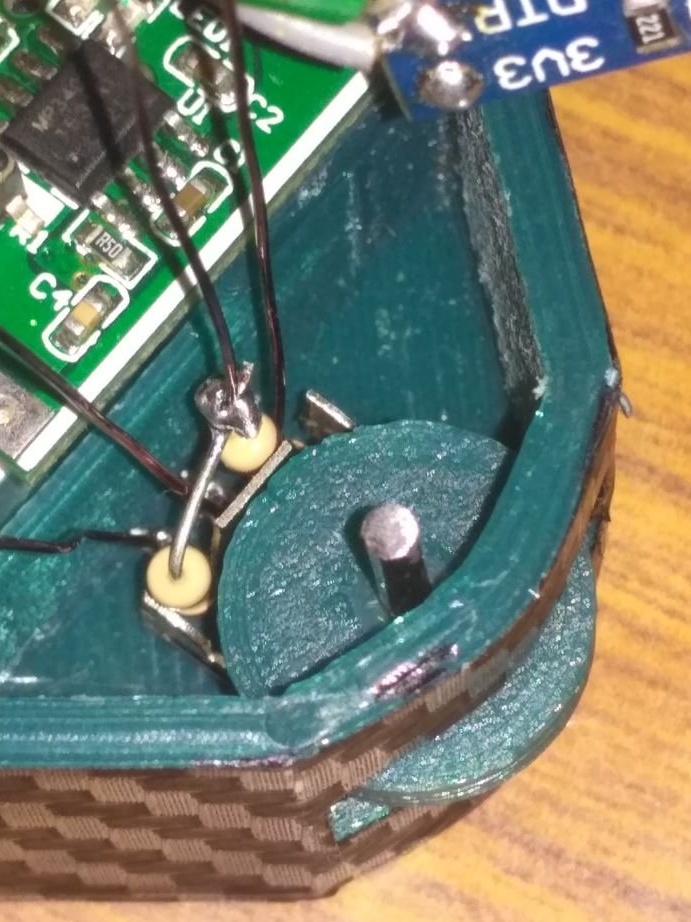
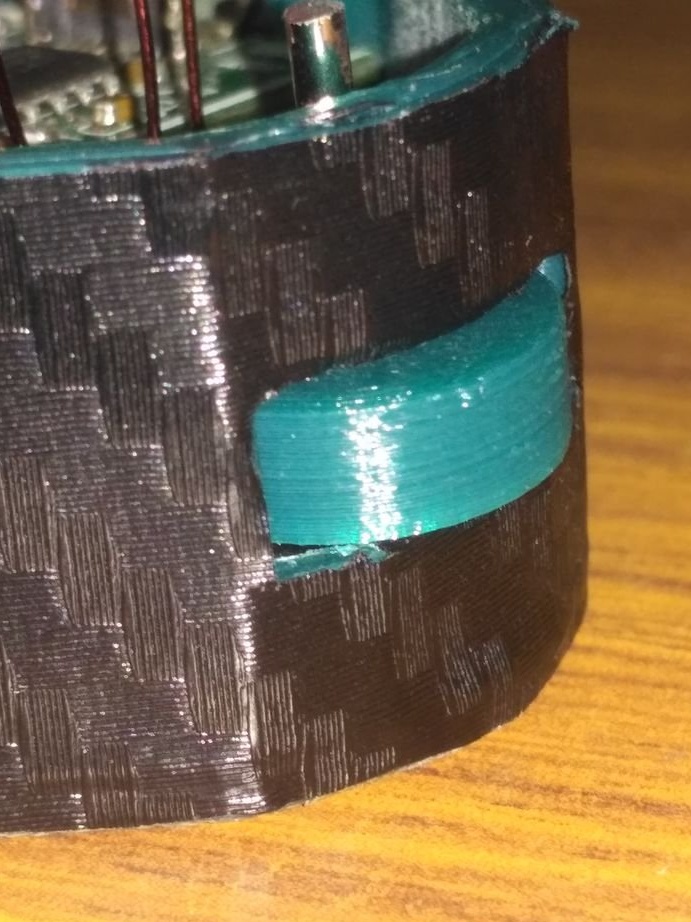
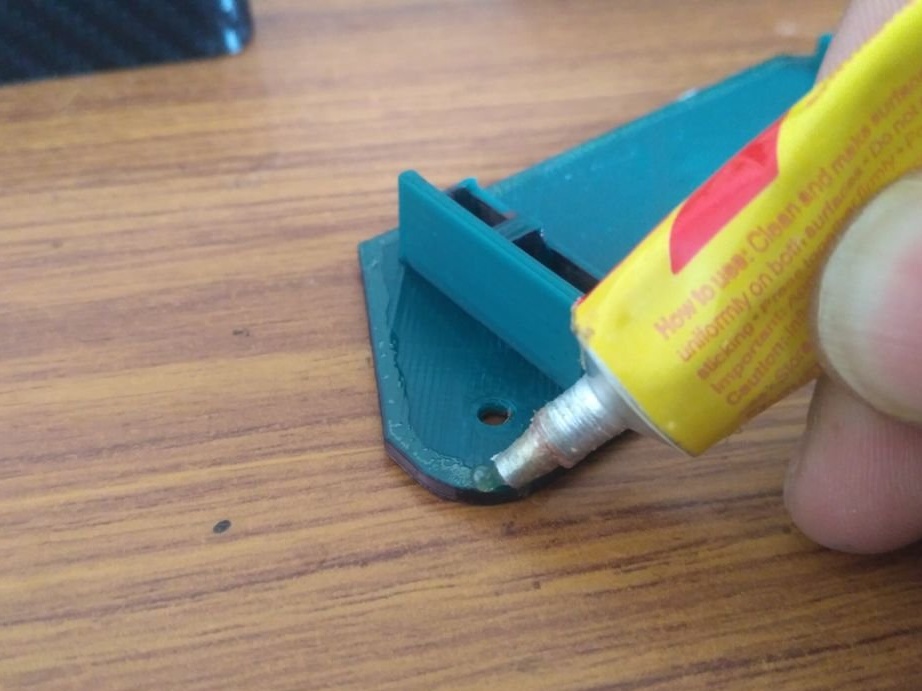
Pas deu: Encoder
Segons l'esquema es munta el codificador. Insereix l’eix d’acer al codificador i a la roda. Utilitza super cola per fixar l’eix i la roda. Instal·la un codificador amb una roda dins de la carcassa.




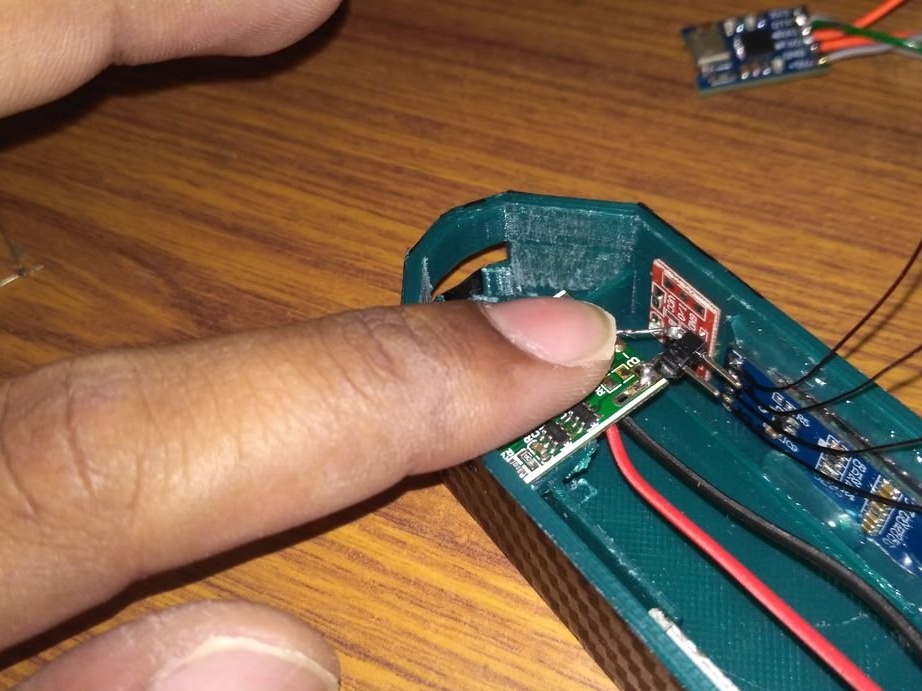
Pas 11: Instal·lació
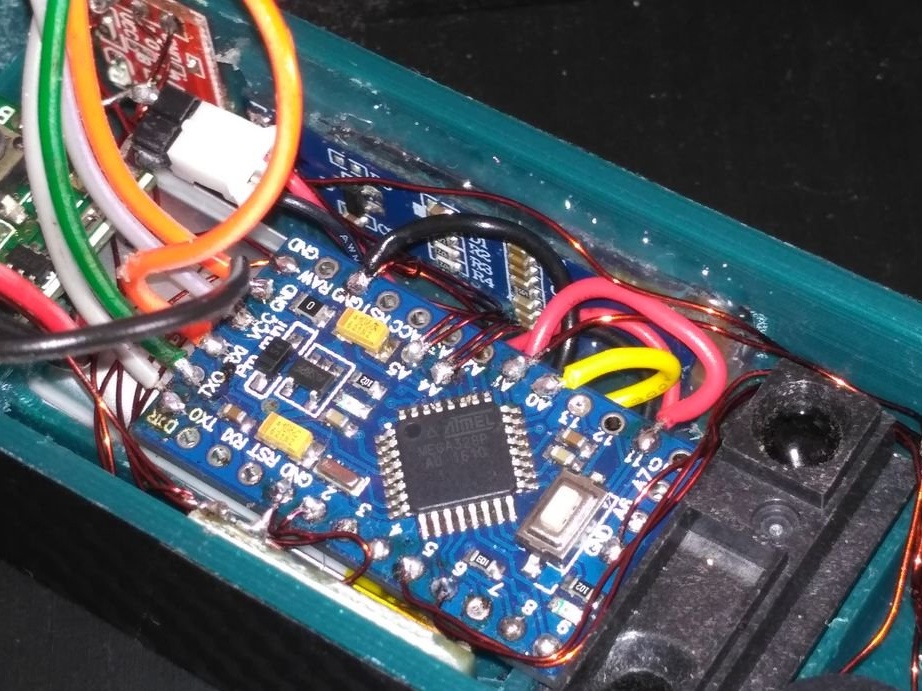
Arranja els mòduls del sensor. Segons el circuit es munten els cables. Durant la instal·lació, cal assegurar-se que els cables no cauen sota la roda i que no cobreixin la visió general del sensor IR.


Pas dotze: descarregar el codi
Carrega codi i biblioteques.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

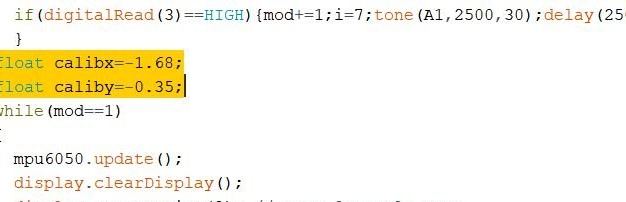
Pas tretze: calibració
Primer es calibra el giroscopi. Com que el mòdul de giroscopi / acceleròmetre MPU6050 està simplement enganxat al cos, pot no ser totalment pla. Per tant, per corregir aquest error, es realitzen els passos següents.
1. Connecteu el dispositiu a l’ordinador i poseu-lo a una superfície plana.
2. Canvieu al mode LEVEL del dispositiu tocant el botó "M" i anoteu els valors X i Y.
3: assigneu aquests valors a les variables "calibx" i "caliby" del codi.
4: torneu a descarregar el programa.



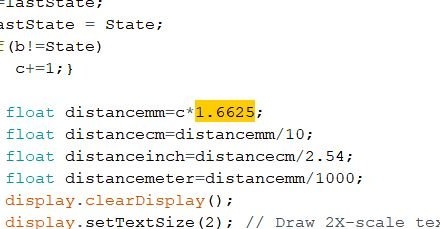
Ara calcula les distàncies per revolució de les rodes.
El nombre de passos per revolució de l’eix del codificador, N = 24 passos
Diàmetre de la roda, D = 12,7 mm
Circumferència de la roda, C = 2 * pi * (D / 2) = 2 * 3,14 * 6,35 = 39,898 mm
Per tant, la distància recorreguda per pas = C / N = 39.898 / 24 = 1.6625 mm.
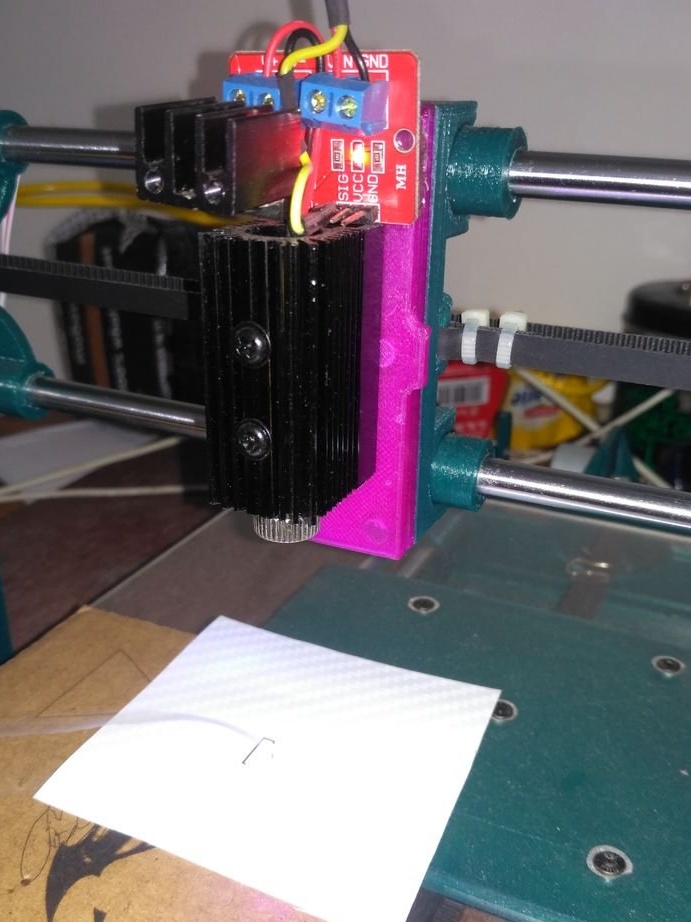
Pas Catorze: Prova
Abans d'instal·lar la coberta de la carcassa, prova sensors, mòdul de càrrega, botons, pantalla.



Quinze pas: muntatge de botons i estoigs
El botó d’engegada de la placa de càrrega és curt i el mestre, tallant les potes, estableix un LED addicional, que premrà el botó.



Enganxa dues meitats del cos.





Pas setze: marcar els botons
Les lletres es van tallar en un tallador làser i després es van enganxar al cos.




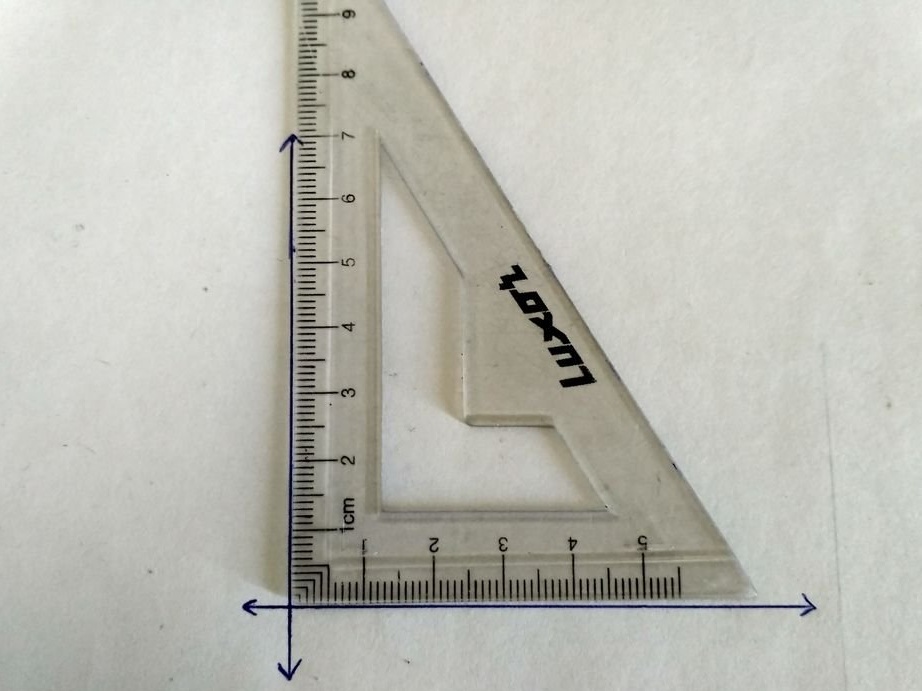
Tot està a punt, només queda provar el dispositiu en funcionament.