

Continuo modelant i construint robots. Ja he escrit instruccions per crear un control remot models i robots. El comandament a distància es basa en l'antic joystick Sega. Aquest joystick té quatre fletxes i 8 botons, suficients per controlar una màquina o un robot petit. La gestió es va dur a terme mitjançant un LED IR. Avui escriuré instruccions per actualitzar aquest control remot, és a dir, la conversió del mateix en un comandament a distància Bluetooth. Segons el mòdul Bluetooth utilitzat, el comandament a distància es connectarà a un dispositiu preprogramat o serà possible connectar-se al comandament a distància. Descriuré totes dues opcions. Necessitarem:
- Joystick de Sega
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 bateries Ni-Mn 1,2v 1000mA
- Mòdul Bluetooth HC-05 o HC-06
- LED vermell
- LED blau
- Resistor 2x75Om, 2x5Om, 1x2Om
- Connector PLSx5 "mare"
- Cola calenta
- cables
- Compartiment de bateries 4xAAA
- Cables multicolors
- Soldadura, soldadura, colofona
- braços rectes
Pas 1 Elecció d’un mòdul Bluetooth
Es necessiten dos mòduls per a la comunicació. En inserirem un al comandament a distància i el segon ens connectarem a la màquina d’escriure o el robot. Hi ha un gran nombre de mòduls Bluetooth. Difereixen en funcions i en protocols de comunicació compatibles. Una llista d'exemples de mòduls que es troben:
- HC-03, HC-04 (HC-04-M, HC-04-S) al xip BC417143;
- HC-05, HC-06 (HC-06-M, HC-06-S) al xip BC417143;
- HC-05-D, HC-06-D;
- HC-07 - mòdul amb xip CSR 41C6;
- HC-08 - mòdul amb consum de potència ultra baix i protocol Bluetooth 4.0;
- HC-09 és el mòdul més nou dissenyat per substituir els HC-06 i HC-07.
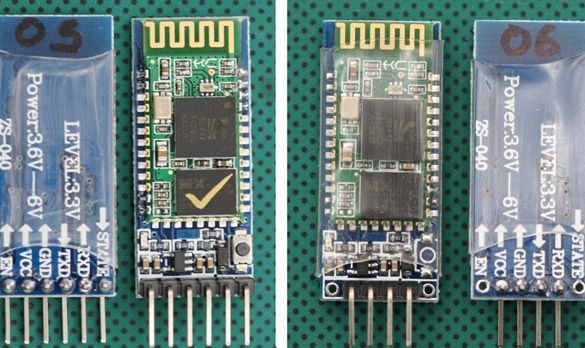
Em vaig instal·lar en dos mòduls HC-05 i HC-06, ja que són òptims quant a preu / funcionalitat. Admeten el protocol de comunicació: Bluetooth Specification v2.0 + EDR. L'abast és de fins a 10 metres (nivell de potència 2). Compatible amb tots els adaptadors Bluetooth que admetin SPP. El volum de memòria flash (per emmagatzemar el firmware i la configuració) és de 8 Mbit. Funcionen amb una freqüència d’un senyal de ràdio - 2,40 .. 2,48 GHz. La interfície d'amfitrió és USB 1.1 / 2.0 o UART. Tenen baix consum d’energia: el corrent durant la comunicació és de 30-40 mA. El valor actual actual és d’uns 25 mA. Un cop establerta la connexió, el corrent consumit és de 8 mA. Aquests mòduls són fàcils de trobar, són els més habituals. Els mòduls són molt similars, però la diferència principal entre ells és que l'HC-05 pot funcionar tant en mode mestre com en mode esclau.HC-06 només pot ser un esclau. En poques paraules, l’HC-06 no pot detectar un dispositiu emparellat i establir una connexió amb ell, només pot obeir el mestre. Els mòduls es venen com a dos taulers soldats junts. El més petit és el mòdul de fàbrica. Ampli: una placa especial per a bricolatge. Sembla un tauler més petit amb xip BC417:

I així, els mòduls DIY HC-05 i HC-06:
Podeu comprar un mòdul sense placa de pa. Costa una mica més barat, però després haureu d’instal·lar un regulador de tensió de 3,3 V per al mòdul. A més, la distància entre els contactes és petita i haureu de turmentar-vos amb la soldadura al mòdul de filferro.
Per establir comunicació entre el control remot i el robot o màquina, cal configurar dos mòduls Bluetooth l’un de l’altre. En aquest cas, configurarem el mòdul HC-05 de manera que trobi i es connecti a l’HC-06.
Pas 2 Configurar l’HC-06.
Primer cal connectar l’HC-06 a l’ordinador. Això es pot fer connectant el mòdul mitjançant un adaptador USB-UART. En aquest cas, la connexió és la següent:
Bluetooth: USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Si no teniu USB-UART a la vostra mà, podeu escriure el següent esbós a qualsevol placa Arduino:
Connecta’t de la següent manera:
Bluetooth - Arduino
TX - pin 2
RX - pin 3
VCC - +5
GND - GND
A continuació, obrim qualsevol programa de terminal, seleccionem el port al qual està connectat l’HC-06, la velocitat predeterminada és 9600, no calen NL i CR. Si no s’estableix una connexió Bluetooth amb l’HC-06, el mòdul està en el mode d’introduir ordres AT. Si el mòdul no respon, prova de sobrecarregar-lo desconnectant el fil positiu i tornant a connectar-lo. I escriviu les ordres següents:
"AT": sense cometes, hauria de sortir la resposta "D'acord".
“AT + ADDR”: amb aquest comandament esbrinem l’adreça única de HC-06, anotem aquesta adreça
"AT + BAUD7": estableix la velocitat en 57600
"AT + RESET": sobrecarreguem el mòdul
No s'han d'introduir les ordres següents, però per si és millor conèixer-les:
"AT + NOM
“AT + ORGL”: restablint el mòdul a la configuració de fàbrica
Això completa la configuració de l’HC-06.
Pas 3 Configurar HC-05.
Connectem el mòdul de manera similar a HC-06. A continuació, obre qualsevol programa de terminal, seleccioneu el port com en què penja USB-UART o Arduino, la velocitat de comunicació per defecte de fàbrica és 9600, però també he conegut a una velocitat de 38400; si no la canvieu, seleccioneu 9600, no la podeu connectar i canviar-la a 38400. També Val la pena incloure els paràmetres NL i CR. Per transferir el mode d'entrada d'ordres AT, heu de prémer el botó de la placa HC-05 i, a continuació, introduïu el següent:
"AT": introduït sense cometes, hauria de sortir la resposta "D'acord". Si veniu, continuem introduint comandaments més endavant.
“AT + ROLE = 1”: amb aquesta ordre establim el paper del mòdul amb el dígit:
0 - esclau, 1 - amo, 2 - esclau al cicle *. Hauríeu d’obtenir la resposta "+ ROLE: 1 \ r \ n" o "D'acord"
“AT + CMODE = 0”: el mòdul en el paper del mestre només està connectat a aquell dispositiu Bluetooth la adreça de la qual està indicada per la comanda “AT + BIND”.
"AT + BIND: 1234.56.123456": per establir una connexió amb el vostre HC-06, heu d'introduir la seva adreça aquí. Després d’introduir totes les ordres, el mòdul està en el paper del mestre (ROLE = 1) i el mode de connexió a l’adreça fixa (CMODE = 0) s’estableix, només es connectarà al dispositiu Bluetooth l’adreça del qual s’especifica aquesta comanda. Les parts de l'adreça s'introdueixen: durant la instal·lació - separades per una coma i quan es respon - a través d'un punt i dos. Obtindreu la resposta: "+ BIND: 1234: 56: 789ABC \ r \ n" o "D'acord"
“AT + UART = 57600,0,0”: estableix la velocitat a 57.600 bps, el bit de parada es representa amb el número: 0 - un, la xifra es representa amb el número: 0 - sense verificació
Si us confongueu amb la configuració del mòdul o deixa de funcionar correctament, proveu la següent comanda:
“AT + ORGL”: el mòdul restableix els paràmetres següents CLASS = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
A continuació, torni a configurar la configuració que necessiteu.
D’aquesta manera, hem creat un fort enllaç entre HC-05 i HC-06. Quan els mòduls HC-05 s’encenen, establirà una connexió amb l’HC-06. D’experiència personal puc dir que és millor encendre primer l’HC-05, i després el HC-06. Si es perd la connexió, heu de sobrecarregar els dos mòduls.
Pas 4 Preparació del comandament a distància.
Aquest pas es descriu detalladament a les instruccions anteriors a:
https://cam.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
És necessari realitzar els passos 1 a 4. La soldadura del díode IR és opcional, encara que no interfereixi.
Pas 5 Connexió d’un mòdul Bluetooth.
Us aconsello que instal·leu HC-06 al comandament Ja que per canviar la configuració del mòdul, només heu d'omplir el croquis corresponent a l'Arduino Pro Mini. En el cas del HC-05, haureu de desmuntar el comandament a distància per prémer el botó per canviar al mode de comandament AT.Connectem tot segons el següent esquema
Joystick - Arduino
Fletxa amunt - passador 2
Fletxa cap avall - passador 4
Fletxa esquerra - passador 5
Fletxa dreta - passador 6
Botó A - pin 8
Botó B - pin 10
Botó C - pin 7
Botó X: pin 12
Botó Y - pin 11
Botó Z: pin 9
Botó d’inici: pin 14 (A0)
Botó de restabliment: RST
General - GND
Bluetooth - Arduino
TX - pin 16 (A2)
RX - passador 17 (A3)
VCC - + 5
GND - GND
HC-05 ens connectem a la vostra màquina d’escriure o robot que aneu a controlar. Podeu trobar les opcions de connexió i els esbossos a les meves altres instruccions. Quan escriviu un esbós de robots, heu d’establir la velocitat de connexió a 57600 i heu d’utilitzar la biblioteca SoftwareSerial a l’esbós.
Pas 6 Preparació de l’entorn i el firmware.
La millor manera d’escriure i editar un esbós és utilitzar l’Arduino IDE. La versió IDE d'Arduino no ha de ser inferior a 1,8. Descarregueu l’ID Arduino des del lloc web oficial:
https://www.arduino.cc/en/Main/Software
A continuació, heu d’afegir la biblioteca a l’ID Arduino. L'esbós utilitza una biblioteca SoftwareSerial.h (per a la comunicació amb el mòdul Bluetooth):
Haureu de descarregar-lo i instal·lar-lo. Podeu instal·lar la biblioteca desempaquetant l’arxiu i movent els fitxers desempaquetats a la carpeta “biblioteques” ubicada a la carpeta amb l’ID Arduino instal·lat. O bé podeu utilitzar l'eina integrada per afegir biblioteques; sense desempaquetar l'arxiu descarregat, seleccioneu el menú Esbós - Connecta la biblioteca a l'ID d'Arduino. A la part superior de la llista desplegable, seleccioneu l'element "Afegeix biblioteca .Zip". I indiqueu la ubicació de l’arxiu descarregat. Després d’instal·lar la biblioteca, heu de reiniciar l’Arduino IDE.
El nostre comandament a distància està parpellejat de la mateixa manera que la versió anterior del comandament a distància, connectat mitjançant USB-TTL a través d'un connector, també es carrega a través del mateix. Quan completeu l’esbós, feu clic a Restablir.
