

Cada vegada més sovint, la tecnologia Smart Home està entrant a les nostres vides. Mitjançant aquesta tecnologia, podeu controlar diversos electrodomèstics des d’il·luminació fins a bullidor, des d’un pany fins a un sistema dividit o un televisor. La comoditat, la possibilitat de molts paràmetres, programació i control des d’un telèfon intel·ligent, etc. és l’avantatge de Smart Home. A més, utilitzant aquesta tecnologia, per exemple, podeu programar l’alimentació programada de peixos en un aquari, gossos o gats. El mestre alimentador va decidir construir un alimentador per a gats. El principi de funcionament de l'alimentador és simple. Dues llaunes amb forats. En posició normal, els forats no són perfectes. Un servoaccionament es fixa a la riba inferior. L’eix servo està fixat a la riba superior. A l'hora establerta, l'alimentació se subministra al servoaccionament. L’eix gira i gira la llauna superior. Els forats estan alineats i una part del menjar cau al bol. Aleshores el banc passa a la seva posició inicial.
Eines i materials:
-2 llaunes metàl·liques de diferents diàmetres;
-Bot plàstic;
-Marcador;
- Servomotor MG996;
-Un bol amb dos compartiments;
- Polyfoam;
-Arduino;
Gravat;
-Ruleta;
-Oficina de ganivet;
-Izolenta (vermell);
- film adhesiu;
- tisores;
- tornavís;
-Empat de corda;
-Wire;
-Nippers;
-Wire;
El contracció de la calor;
- Més lleuger;
Primer pas: Preparació de llaunes
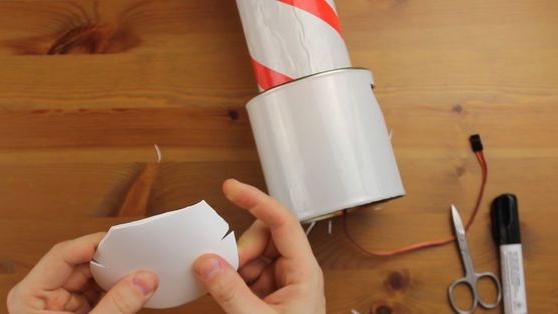
Fa un marcatge als bancs. Retalla forats segons la disposició (veure foto). Al centre, fa forats per l’eix servo.










Pas segon: decora les llaunes
Envolta les llaunes sobre l’embolcall Decora amb cinta vermella.




Tercer pas: instal·leu el Servo
Fa forats a la riba superior i fixa la femella de l’eix servomotor. Un servoaccionament està muntat a la riba inferior. Connecta dos bancs.











Pas quart: cas de transferència
Retalleu una finestra de distribució al flascó inferior. La finestra s'hauria de situar exactament sota l'obertura de la llauna inferior. Des d’un plàstic es pot tallar una safata. Assegura la safata.



Cinquè Pas: Bol
Personalitza l'escuma en forma d'una secció d'un bol. Fixa una coberta de plàstic des de la llauna inferior a l'escuma. Instal·la escuma a la secció. Es posa una llauna a la tapa.






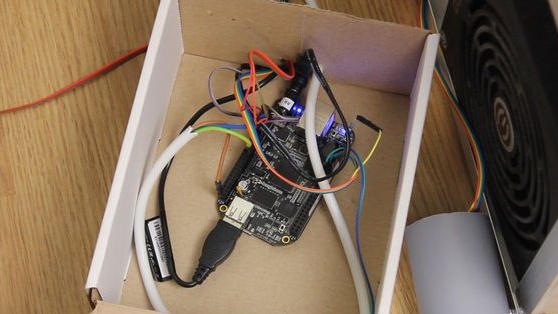
Pas sisè: Arduino
Fora un forat a la part inferior de la llauna. Sortides de cables del servo.Es connecta a la placa Arduino. Cable marró a GND, taronja a 9 o 10 PWM. Aïlla els cables amb contracció tèrmica. Podeu veure el diagrama de connexió
.
Enllaç al codi.



Resta emplenar l’alimentació i provar el funcionament de l’alimentador.


Com podeu veure, l’autor té dos alimentadors. El segon alimentador s'activa prement un botó. A la darrera foto podeu veure com el gat prem el botó. A més, es pot veure tot el procés de fabricació i funcionament de l'alimentador al vídeo.