

Bon dia amants de l’arduino! Mentre penjava a Internet, vaig trobar un article força divertit sobre com fer un manipulador manual que repeteix els moviments de la mà d’una persona, inspirat en la simplicitat i l’efecte. casolans casolà va decidir recollir-lo. Vaig trobar sensors de flexió a l’Alliekspress per a la mà del transmissor i vaig quedar una mica morta, una cosa estava a la regió de 15 a 20 dòlars. Resulta que 5 d’aquests sensors d’una sola mà tindran un cost de 75-100 dòlars i això només és per als sensors. Al cap d'un temps, vaig aprendre a crear aquests sensors fes-ho tu mateixResulta ser molt senzill i barat.
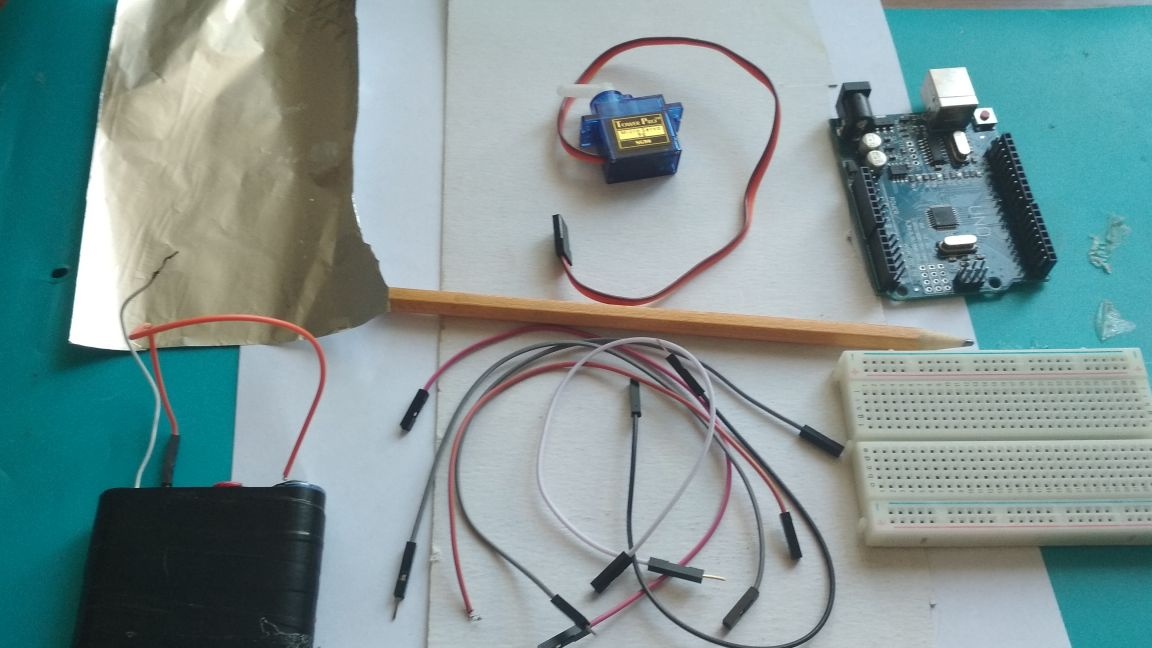
I per al sensor de flexió que necessitem:
pagament Arduino Uno ()
-tapa de taula
- connexió de cables com "pare-mare" o "pare-pare"
-servomotor
cartró
paper
làmina
llapis
- font d'alimentació de 6 a 12 volts (faig servir 4 bateries connectades en sèrie a 1,5 V)
De les eines que necessitem:
pistola de cola
tisores
Per tant, el primer que tallem del cartró són dues tires de 2 cm més que el dit índex i uns 1 cm d'ample:
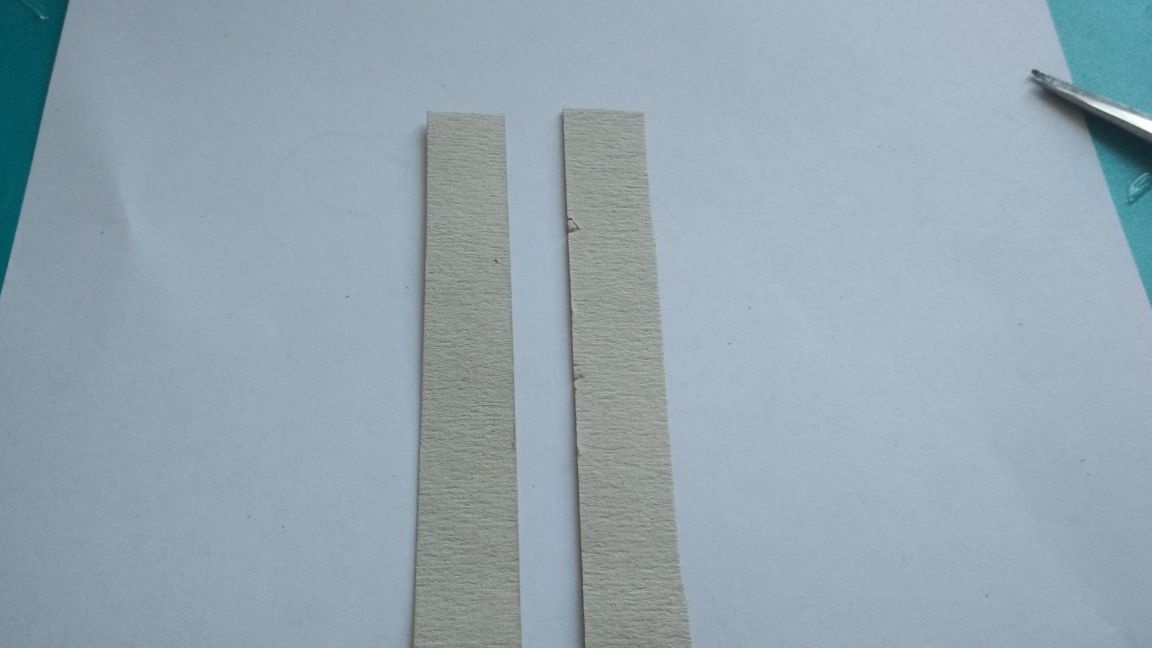

Retalleu una de la mateixa tira de paper una mica menys:

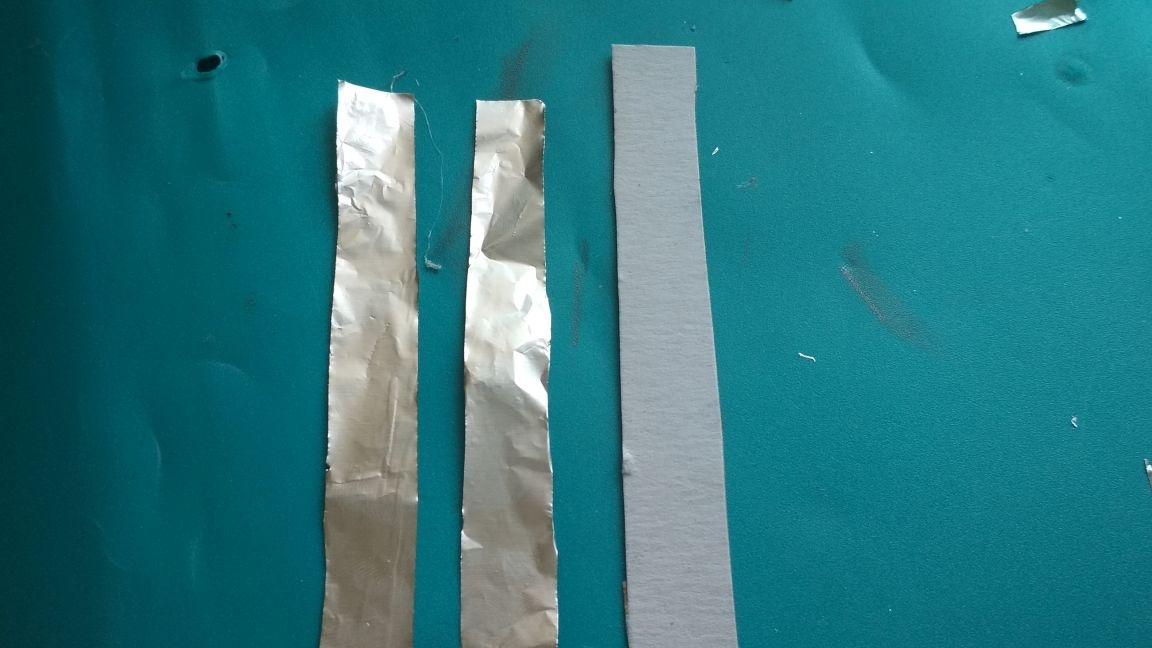
Lombra del llapis a banda i banda de la tira de paper el millor possible:


Talleu dues tires de paper més petites que el paper:
Colla-les a les tires de cartró tal i com es mostra a la foto:

A partir dels cables de connexió "pare-mare" vam tallar la "mare" de sortida i netejem els seus extrems de l'aïllament:
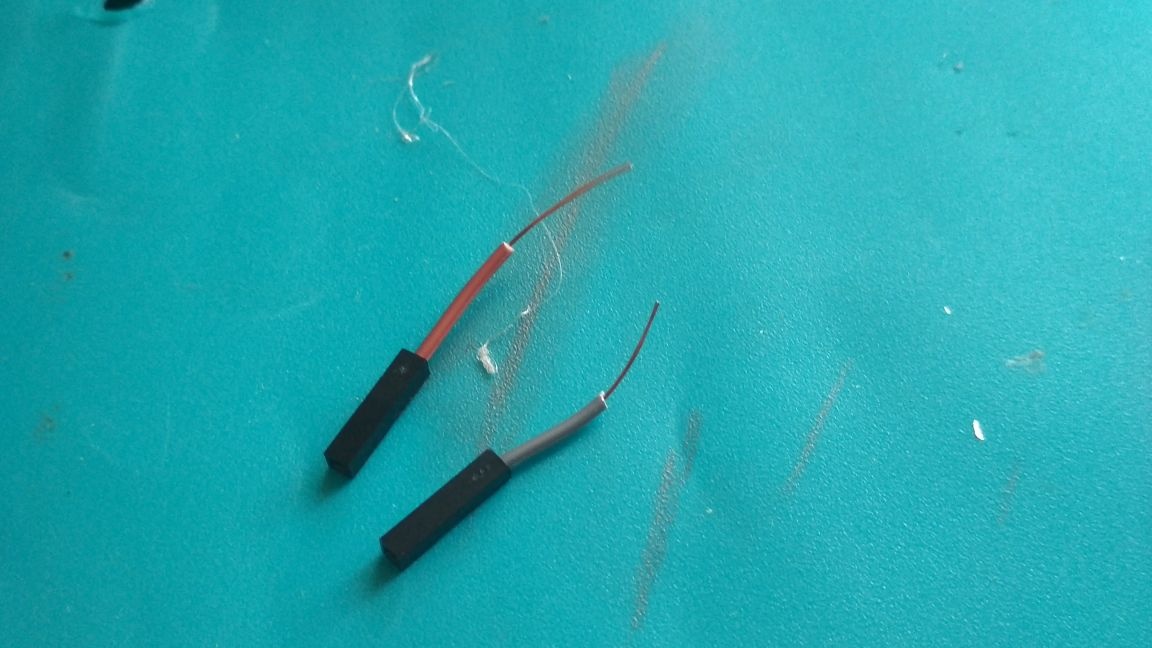
Adjuntem de cinta adhesiva o de soldadura:

Adjuntem una tira de paper a una de les meitats, de manera que estigui en contacte amb la làmina, després tapem amb la segona meitat del costat amb el paper, premem i colem els costats:

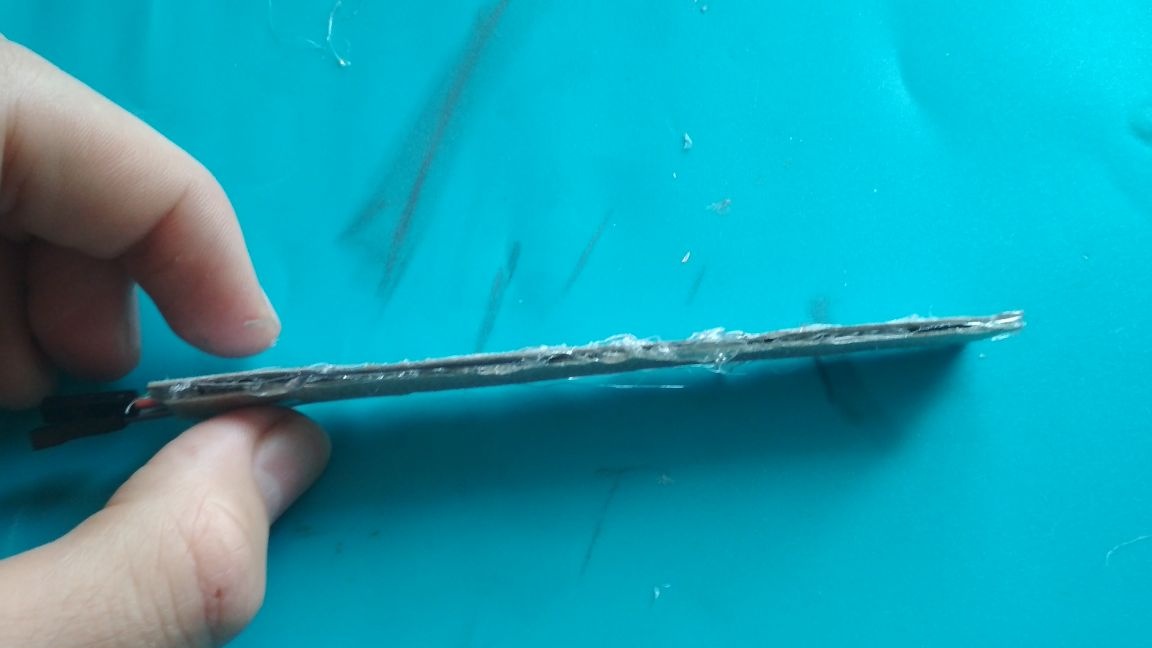

Fabriquem "serps" a cada costat amb l'ajuda de cola calenta, que es necessiten perquè el disseny sigui més flexible

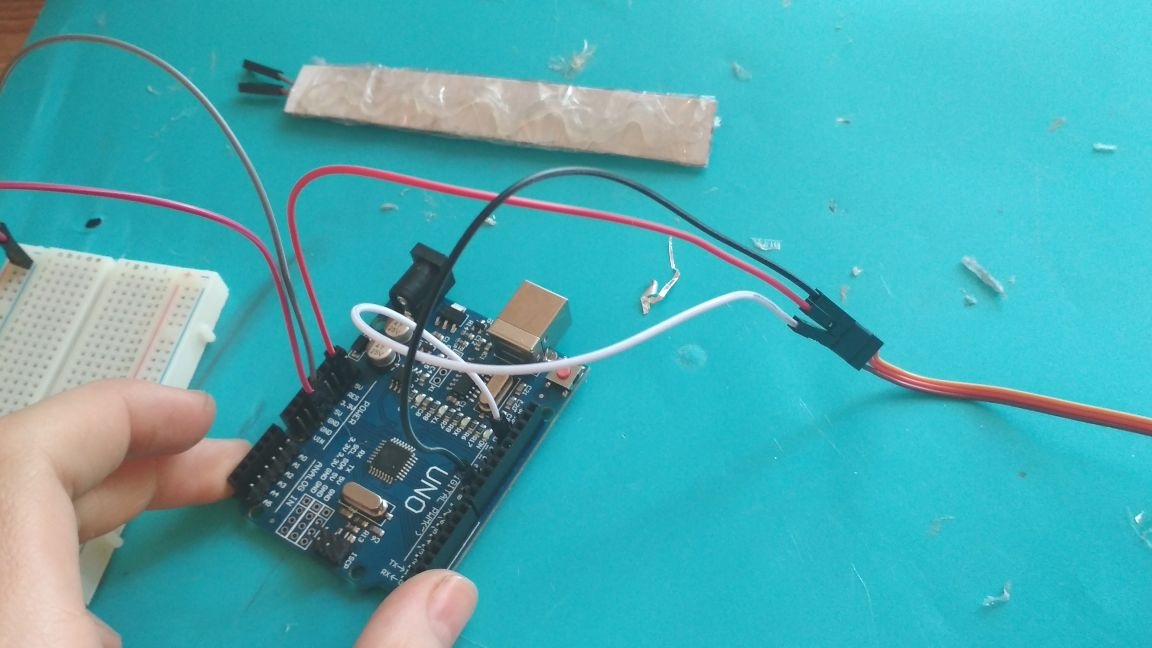
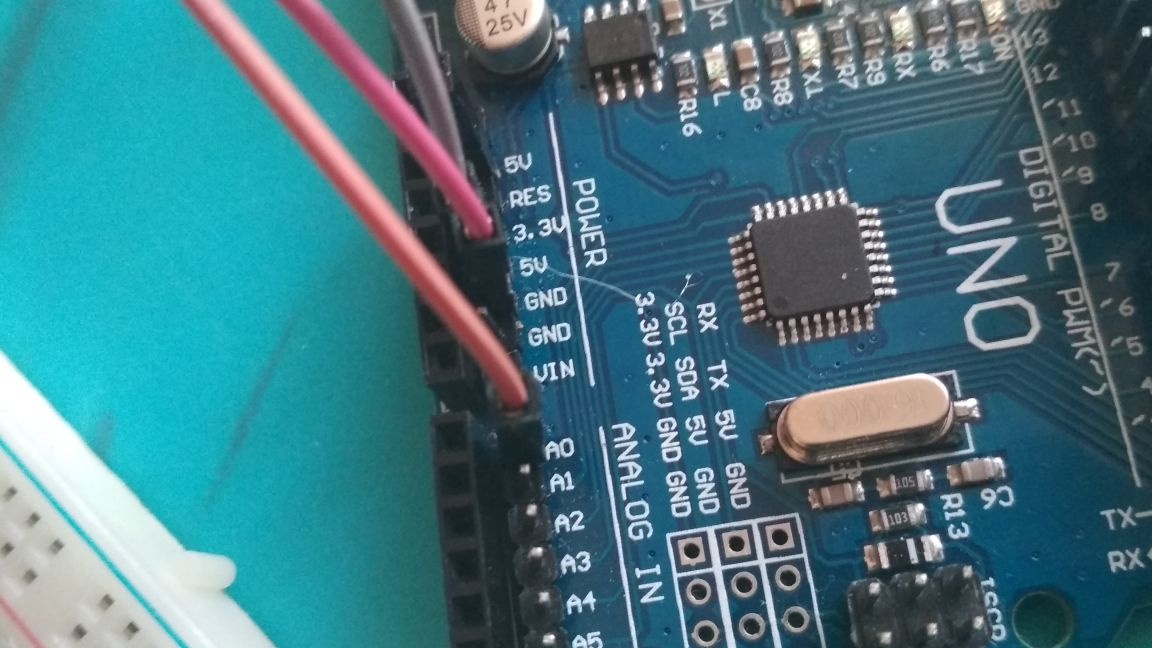
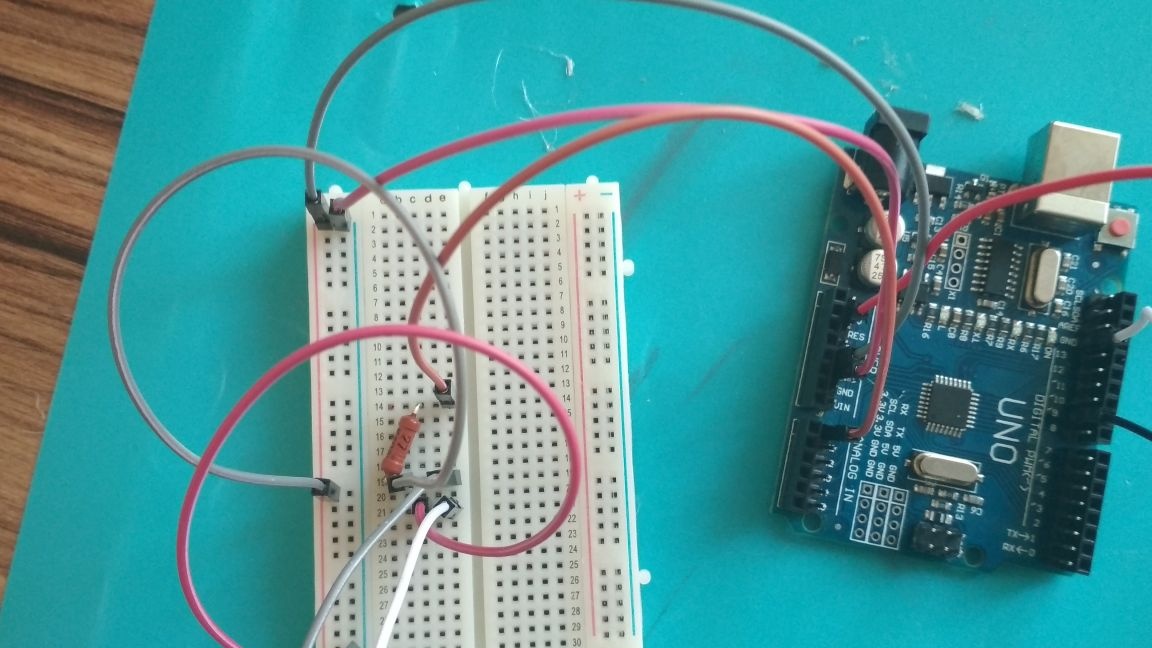
Agafem un arduino i connectem la sortida de 5v al plus de la placa de pa, i Gnd al menys:

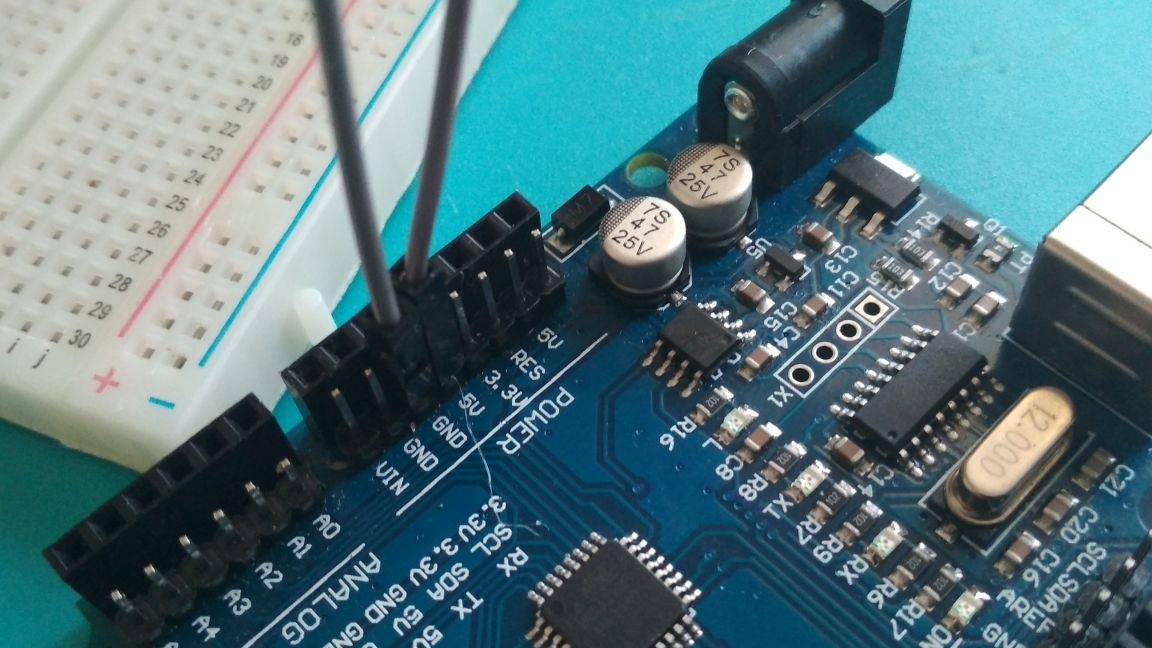
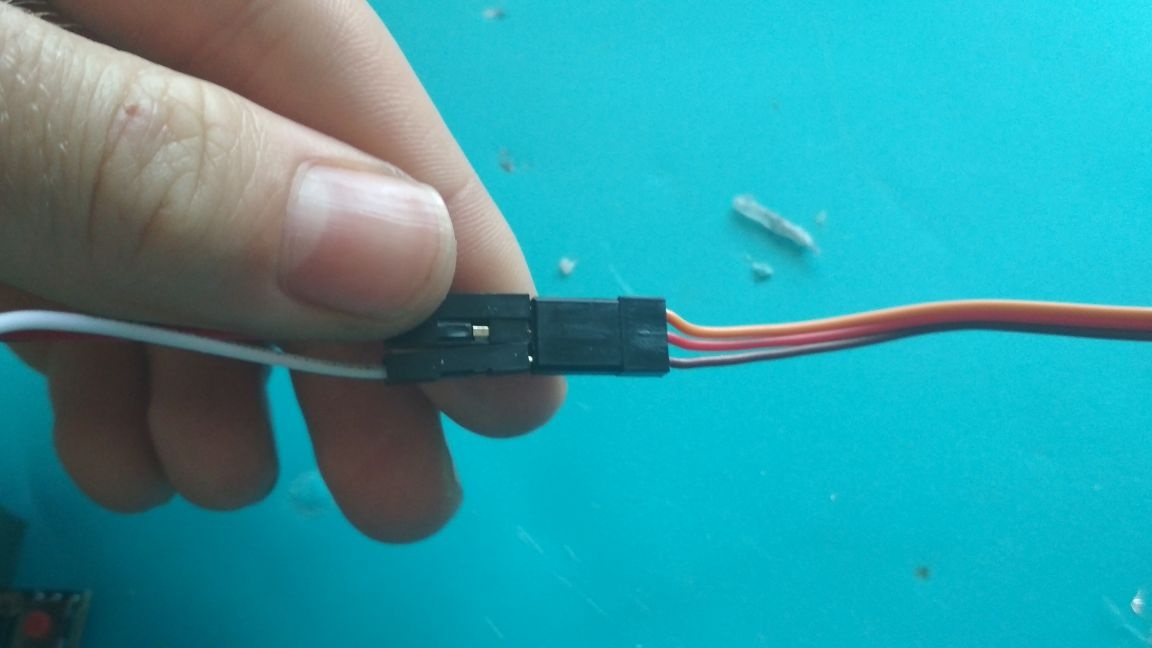
Afegiu un cable de connexió al servomotor i connecteu-lo al arduino de la manera següent:
Fil marró a gnd
vermell a 5v
taronja a 9 pins
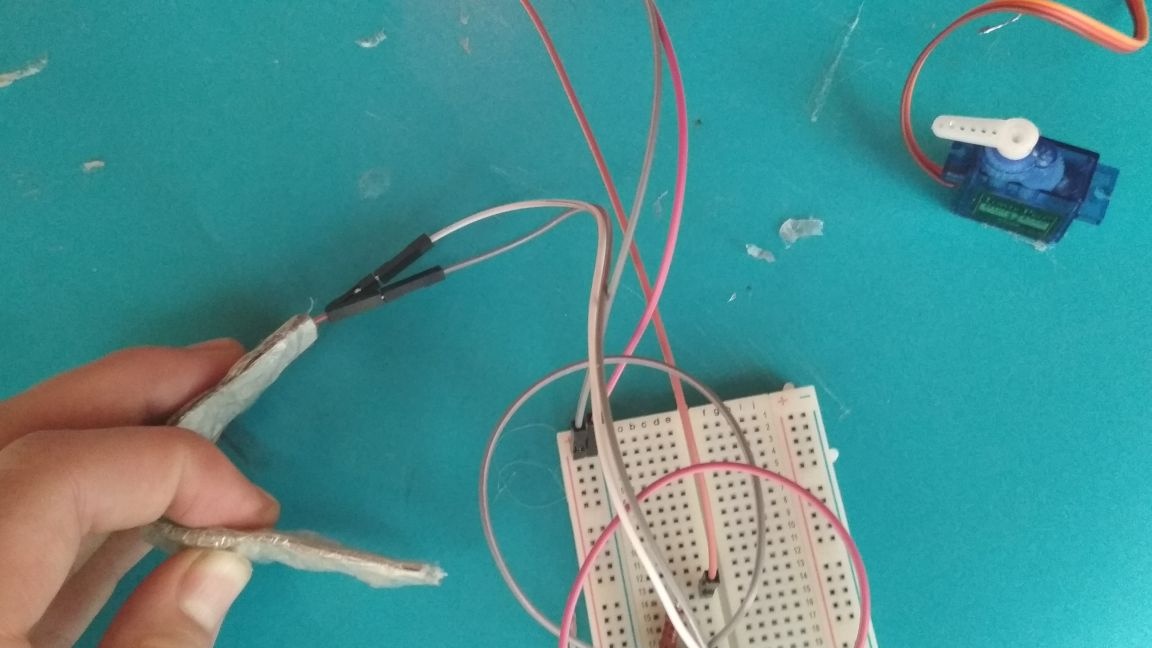
Al nostre sensor de flexió, afegiu dos fils pare-pare

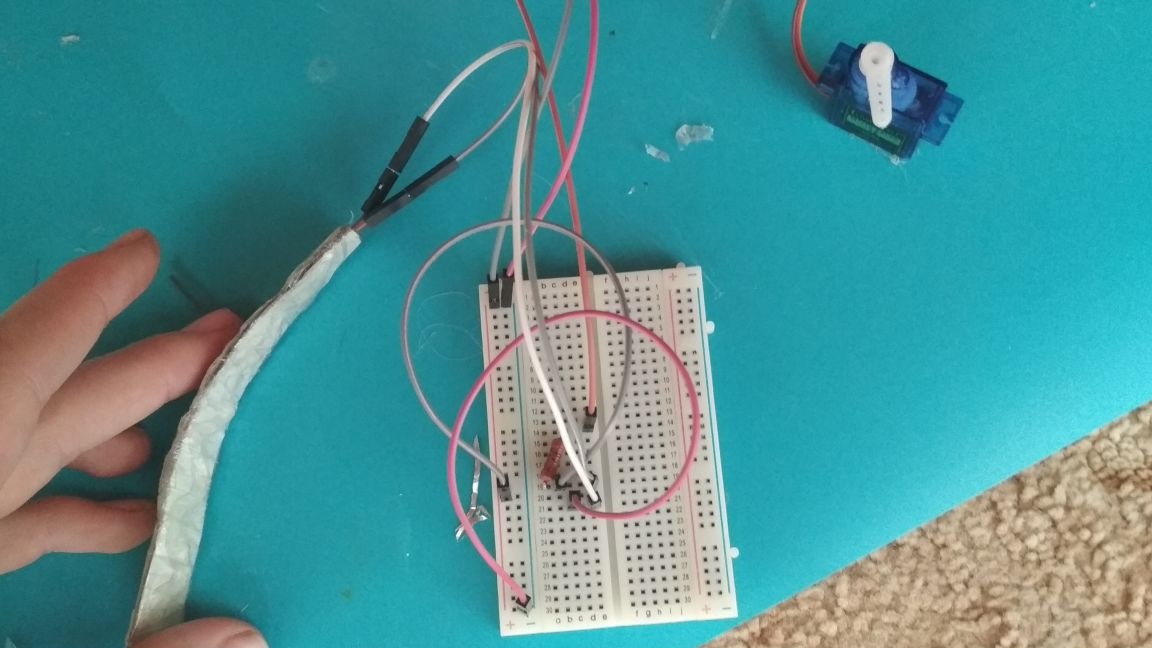
Connecta’ls a la placa del pa:
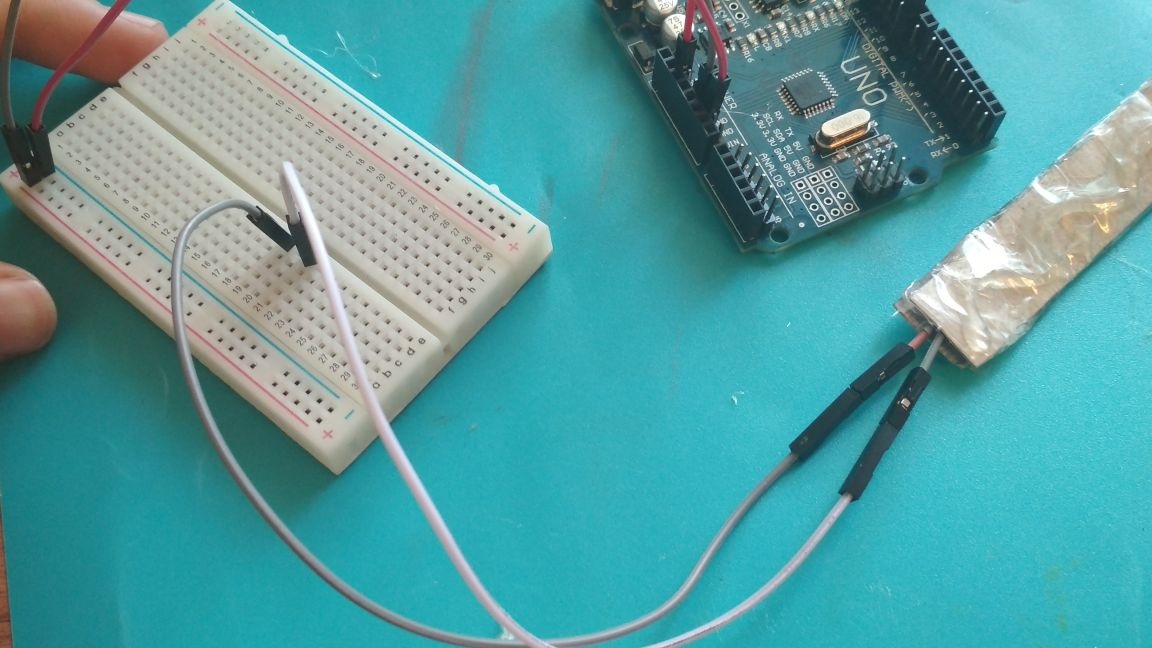
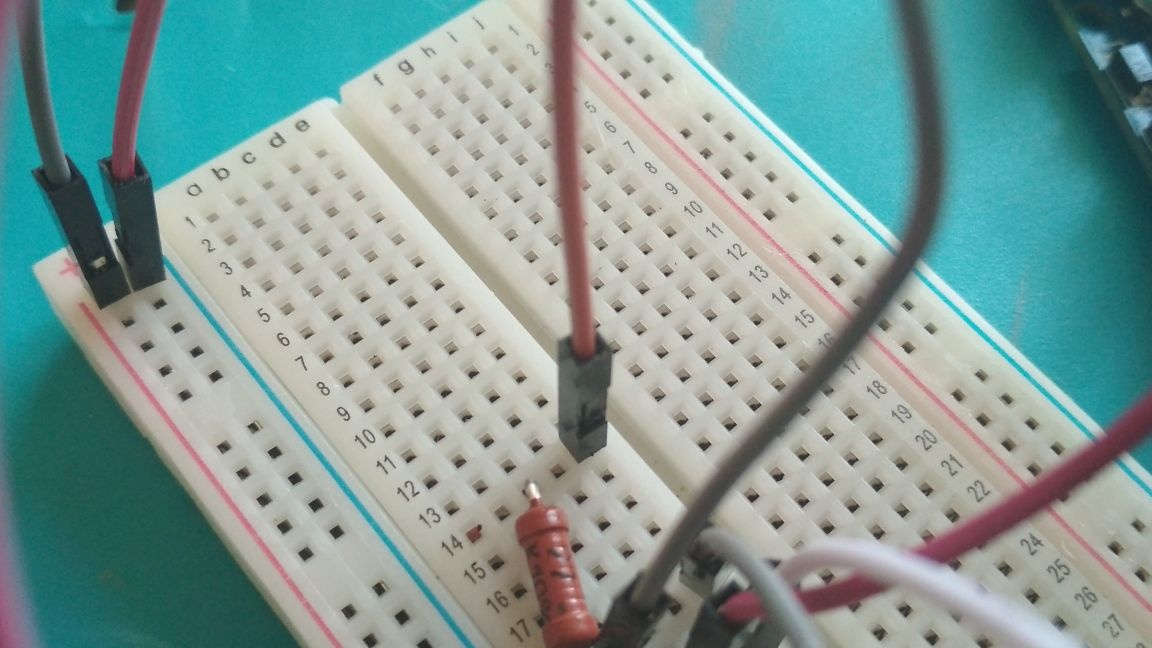
Un dels extrems del sensor està connectat al plus de la placa de pa mitjançant una resistència de 22 quilo-ohm (malauradament la vaig barrejar i la vaig connectar a una altra sortida, però això no responia a l'operativitat) i l'altre a menys:
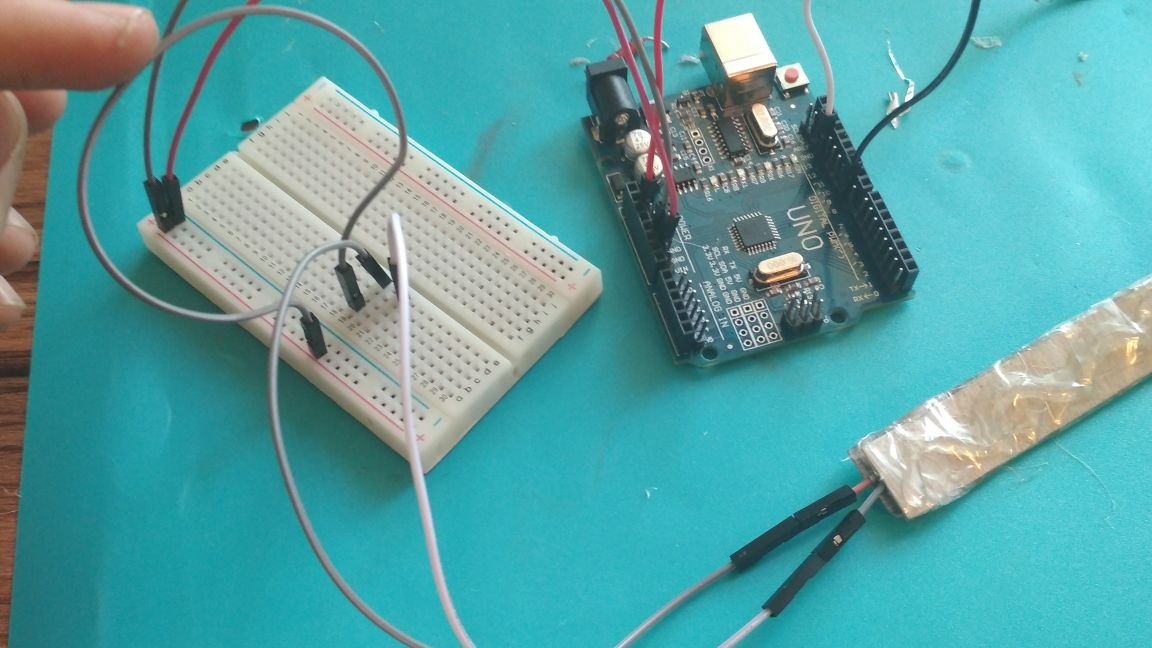
A la línia del panell on es connecta l'extrem del sensor al plus, afegiu-hi un altre fil i sortiu-lo a la sortida A0 d'Arduino:
Ara connectem Arduino a l’ordinador, iniciem l’ID Arduino i carreguem el següent esbós a ell:
#incloure
Servo servo1;
const int flexpin = 0;
nul configuració ()
{
Serial.begin (9600);
servo1.attach (9);
}
bucle void ()
{
flexió int;
int servoposició;
flexposició = analogRead (flexpin);
servoposició = mapa (flexposició, 1018, 1023, 0, 90);
servoposició = restringir (servoposició, 0, 90);
servo1.write (servoposició);
Serial.print ("sensor:");
Serial.print (flexposició);
Serial.print ("servo:");
Serial.println (servoposició);
retard (1000);
}Enceneu el monitor del port al qual està connectat Arduino i carregueu l'esbós

Ara observem els canvis que es produeixen al monitor del port quan el nostre sensor es doblega, veiem que 1023 és de 90 graus, i 1020 i 1019 són 0, així que en el meu cas, canvio el número 1018 del croquis a 1020, podeu tenir-ne un de diferent. Ara el 1020 és de 0 graus, i el 1023 de 90 graus. Després de tots els canvis, pengeu el nou esbós personalitzat al tauler d’Arduino


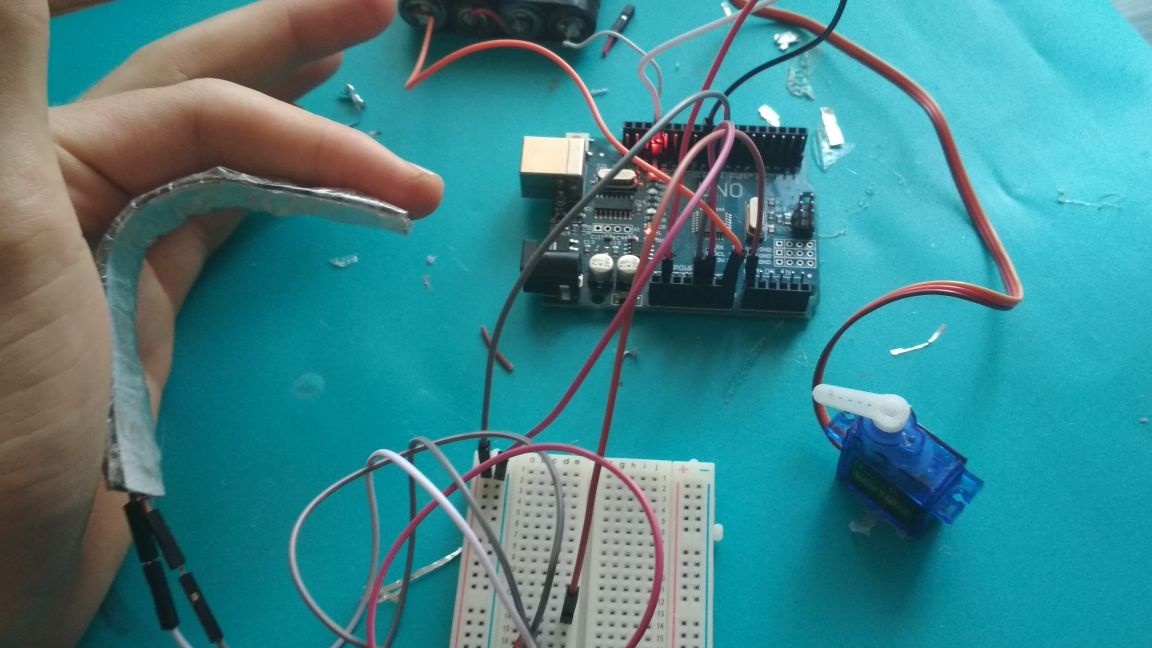
Doncs bé! Ja està a punt el nostre senzill plegador més senzill i més important.
Si tot es fa correctament, llavors quan el sensor està doblat, el servoaccionador farà un gir de 90 graus i, quan s’ampliï, tornarà a la seva posició original. Per descomptat, la precisió d’aquest sensor és inferior a la comprada, però és adequada per a projectes que no siguin especialment confusos i, a més, si tot es fa amb cura i sintonització fina, resultarà gairebé com es va comprar. Espero que aquest article sigui útil per a algú.
Gràcies a tots per la vostra atenció!