


Bon dia a tots! En aquest article m'agradaria explicar-ne l'ús Arduino, un conjunt de leds i un sensor d'ultrasons, podeu muntar un dispositiu que determini la distància de l'observador a l'objecte, és a dir, cercador d’interval. I així anem!
Què necessitem:
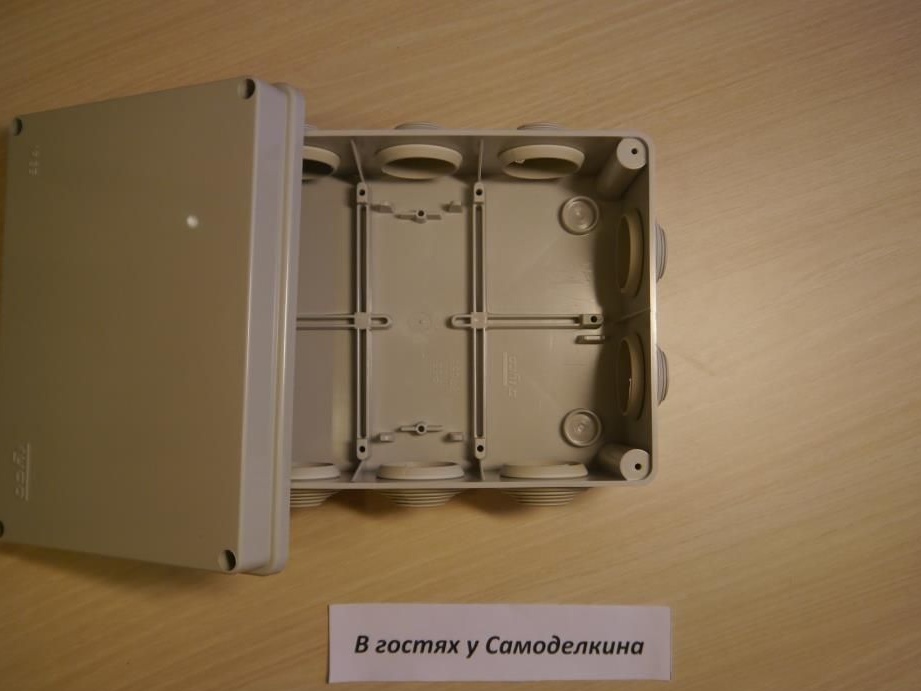
Plana caixa. És desitjable que sigui de mida petita, ja que només contindrà un microcontrolador.
Utilitzant Transductor d’ultrasons HC-SR04 podem determinar la distància.

Indicador de quatre dígits hem de treure els valors obtinguts.

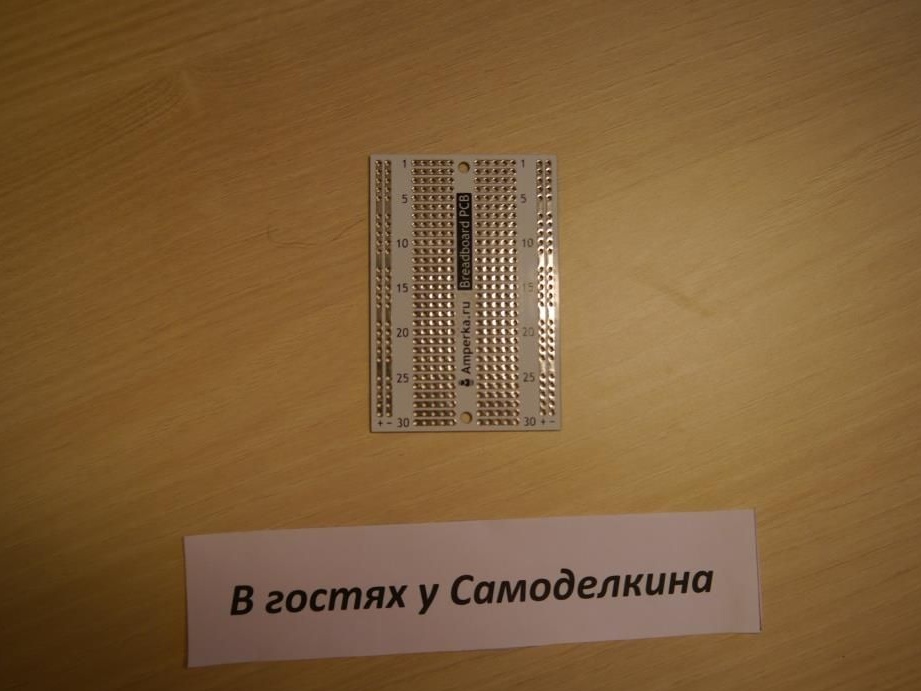
Conjunt LEDs de colors (he utilitzat verd, ja que són més brillants), resistències a 220 ohms cables o saltadors també panera.

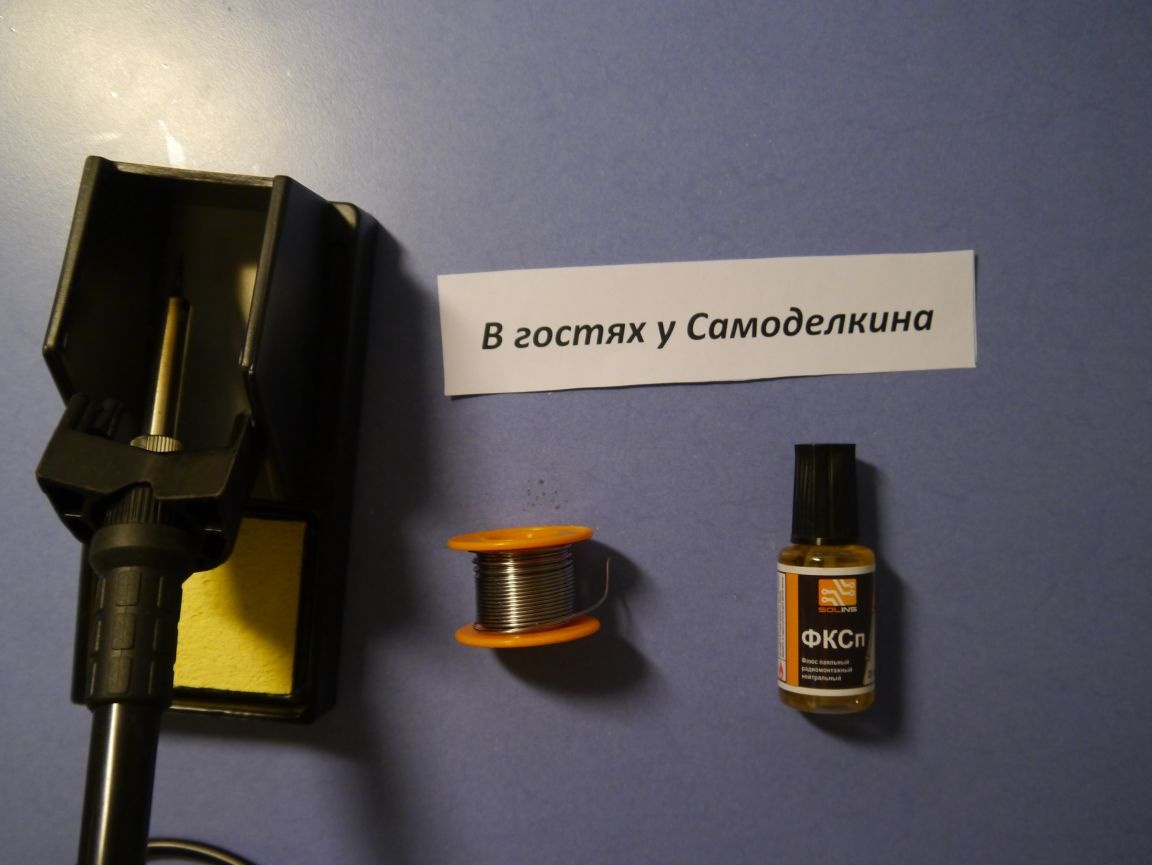
Perquè els components del nostre dispositiu estiguin ben fixats, els vendré.
Per això necessitem soldadura, flux, soldaduratambé panell per soldar.
I, per descomptat, sense Arduino no podem fer-ho! (Podeu triar qualsevol microcontrolador, jo preferí Arduino Leonardo o el seu equivalent Iskra Neo)

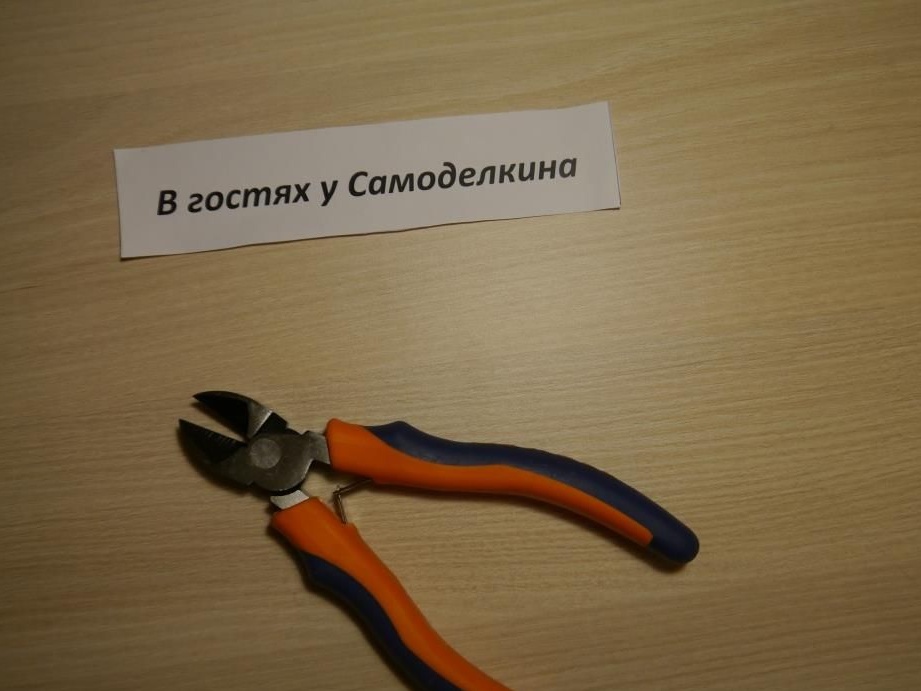
De les eines necessitem una soldadura, com he dit més amunt, ganivet i mamelles.
Ara comencem a muntar el dispositiu.
Pas 1
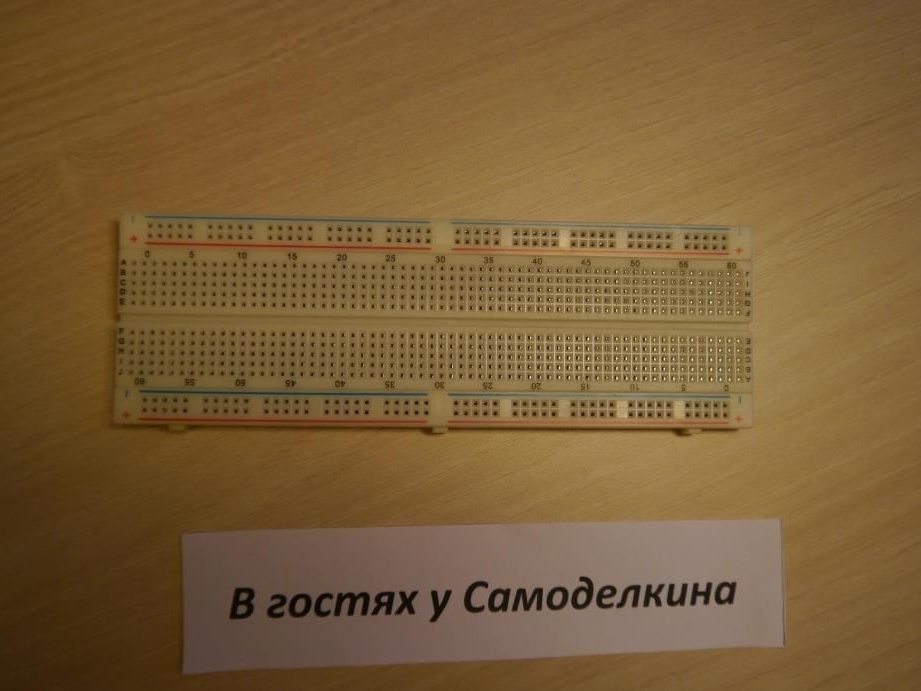
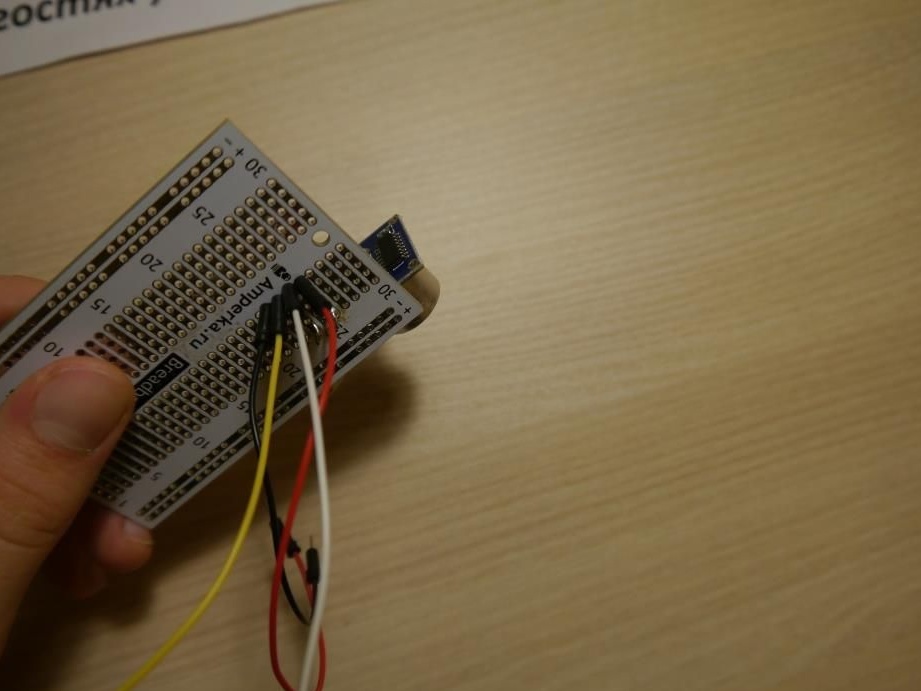
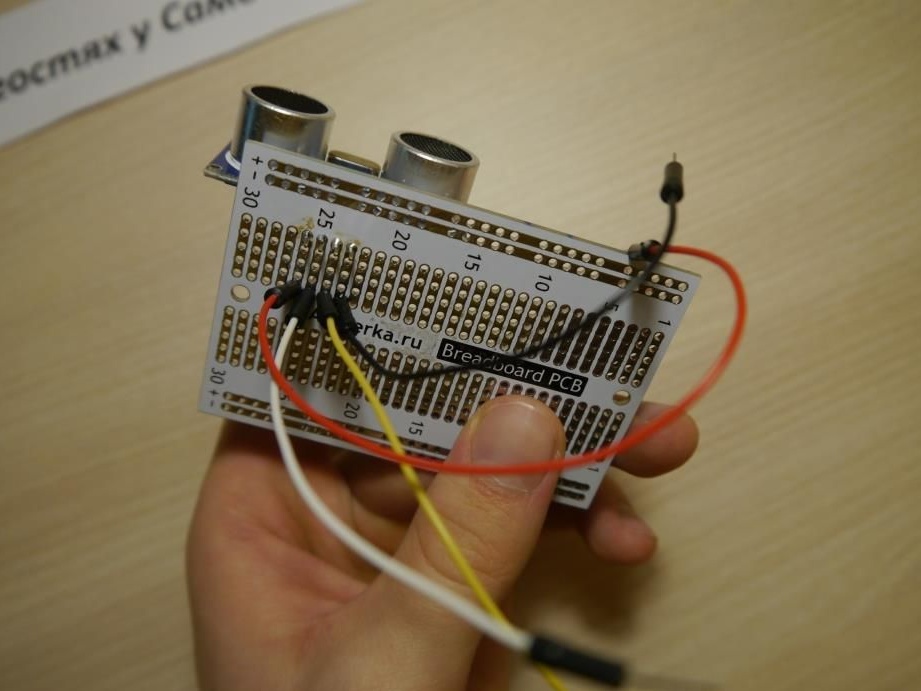
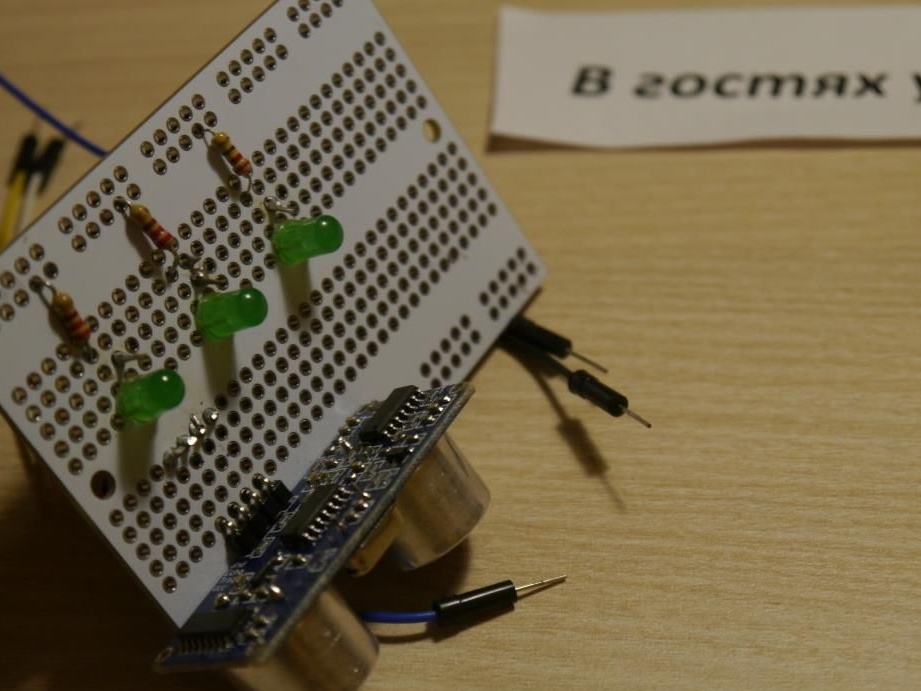
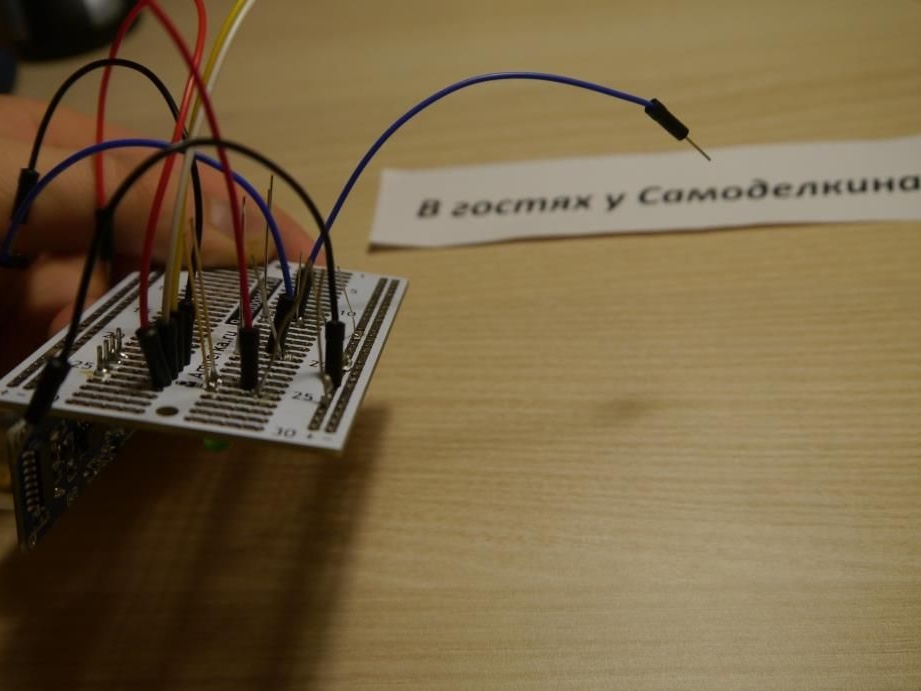
Per començar, utilitzant una placa de pa, muntarem un prototip del nostre futur dispositiu. Semblarà així.

No et preocupis! No hi ha res terrible en aquest embolic de cables!
El sensor HC-SR04 té quatre contactes: més, menys (que enganxem al 5V i el GND del controlador), Trig i Echo (inserim els pins arduino en 12 i 11, respectivament)
L’indicador de quatre dígits té 3 cables: potència, terra i senyal. Aquest últim està connectat a l'Arduino de 9 pins.
Connectem tres LEDs a 6, 5 i 4 contactes del controlador en sèrie amb resistències. No us oblideu de la polaritat. El corrent flueix d’una cama més llarga a una més curta.
Tot això, quan muntem el nostre dispositiu en una placa de pa, hem penjat l’esbós (serà al final de l’article) i ens hem assegurat que tot funciona, no dubteu en començar a soldar.
Pas 2
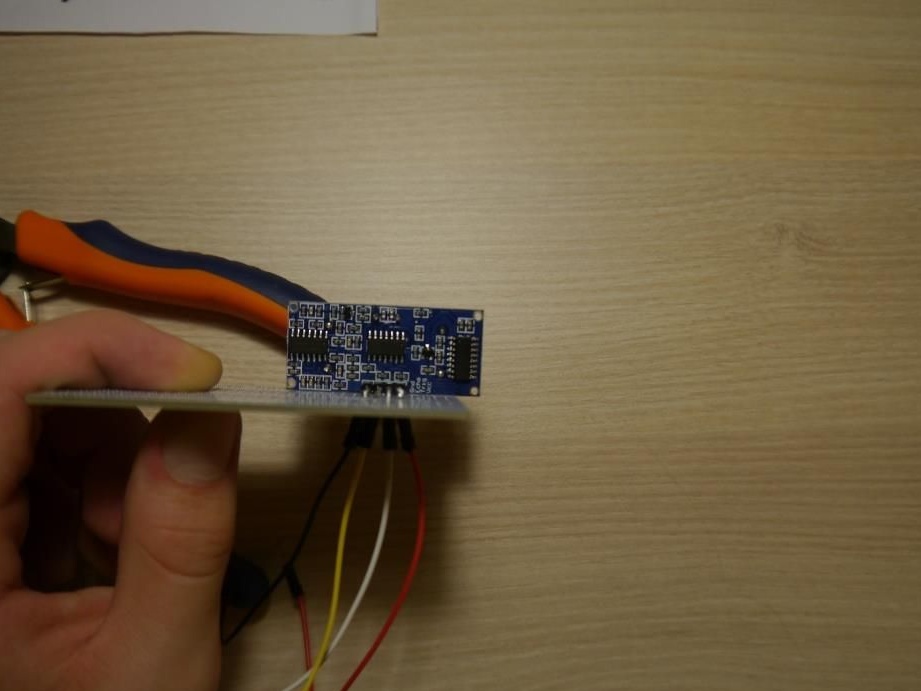
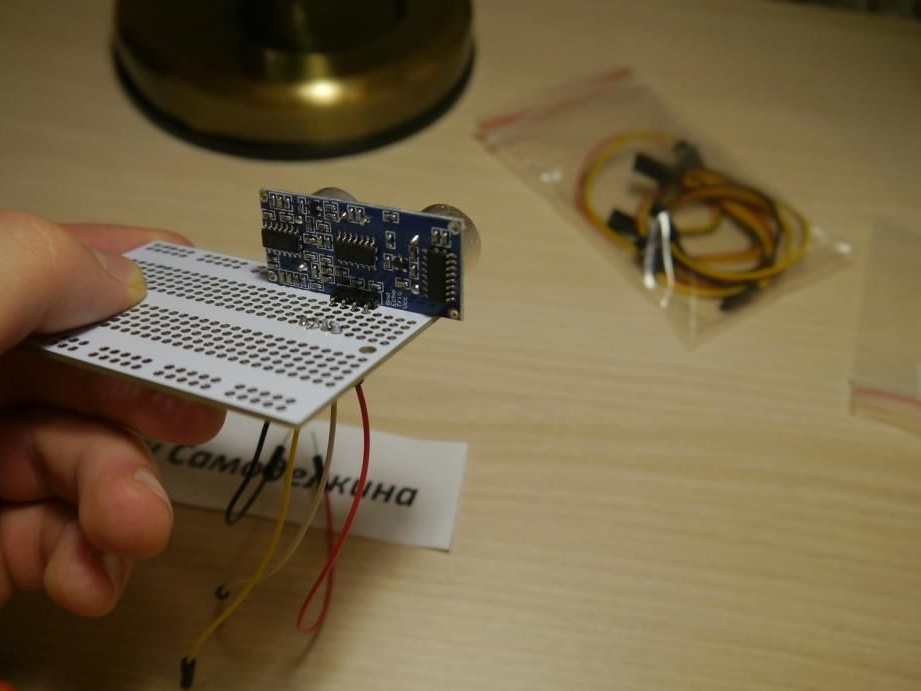
Primer, soldar el sensor d’ultrasons al panell. Vaig utilitzar una petita placa de pa, ja que el nombre d’elements no supera els 7.

Després d’això, amb l’ajuda dels pessebres, mossegueu les cames (demano disculpes per la tautologia), fent-les més curtes perquè no s’interfereixin i semblin més boniques!

Després d'això, solda els quatre cables contra els contactes del sensor.
A més, no us oblideu dels mosquetons!
Pas 3
El sensor està al seu lloc, queda soldar els tres LED juntament amb les resistències.
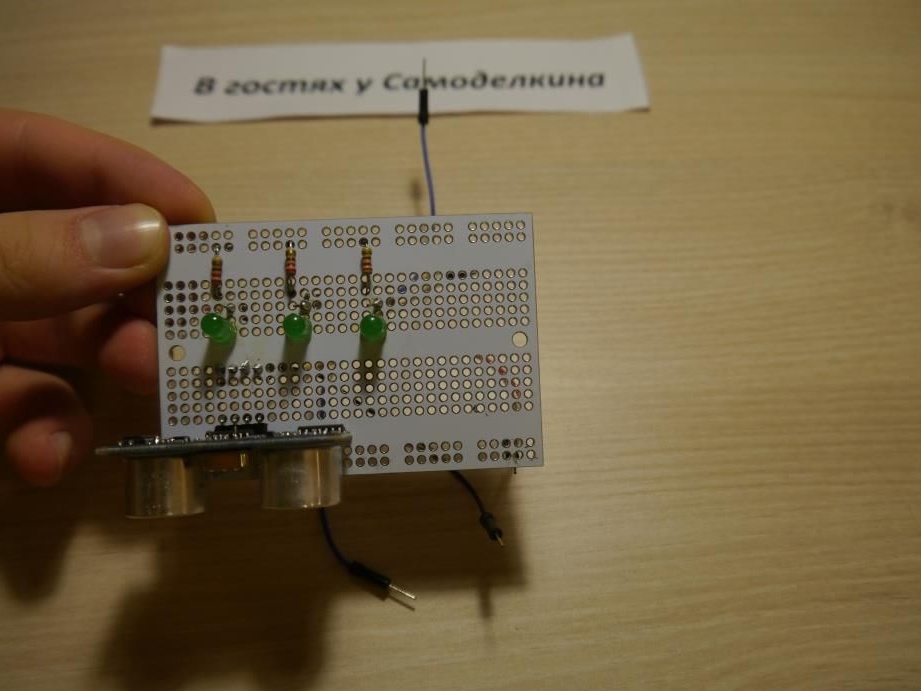
Al revers, sembla així:
Pas # 4
Al lateral de la caixa, talleu un forat rodó per al menjar.

A la tapa, heu de tallar una cavitat a la mida (lleugerament menor) de la vostra taula, i també foradar forats per als cargols.


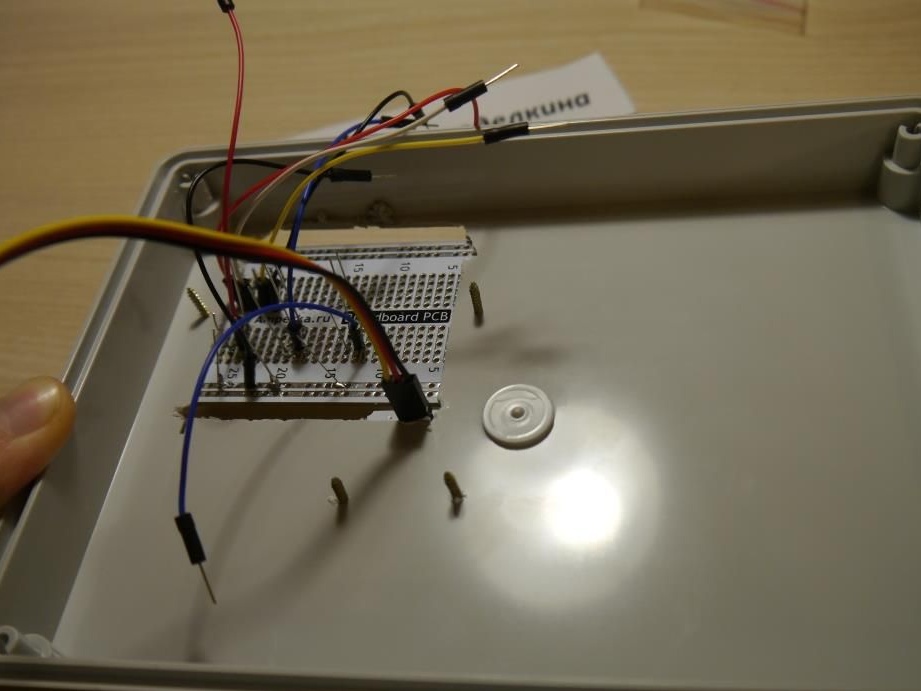
Ara si cargolem un panell buit sense elements (només ho he fet per demostrar-ho ..), obtenim una cosa com la següent:

Pas 5
Així que, per fer-ho més convenient, us proposo connectar primer els cables a l’arduino i, a continuació, cargolar el tauler de pa a la tapa de la caixa. A més, no us oblideu del nostre indicador, que he situat a sobre del disseny.



Tot el muntatge d'aquest dispositiu ja està acabat.
Només resta per descarregar el següent esbós i gaudeix de la joguina!
#incloure
#incloure
Sonar NewPing (12.11, 400);
int a, j, b;
llarg sense signar t = 0;
int masiv [] = {1,0,0,0,1,0,0,0,1};
nul configuració ()
{
de (int i = 4; i & lt; 7; i ++)
{
pinMode (i, OUTPUT);
}
displayClear (9);
de (int i = 4; i & lt; 7; i ++)
{
digitalWrite (i, 0);
}
}
bucle void ()
{
j = 7;
per to (int i = 0; i100) (2,70);
digitalWrite (j, masiv [i]);
while (millis () & lt; = t + b)
{
retard (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
t = millis ();
si (j == 4) j = 7;
si (i == 8)
{
digitalWrite (4.1);
while (millis () & lt; = (t + b) + (b * 2))
{
retard (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
digitalWrite (4.0);
t = millis ();
}
}
Unes quantes paraules codi de programa. Gràcies a ell, els nostres tres LEDs parpellejaran alternativament l’un darrere l’altre, i la velocitat del seu parpelleig dependrà de la distància a l’objecte, calculada pel sensor d’ultrasons. Però, perquè els LED parpellegen, no és del tot lògic utilitzar la funció de retard (), ja que quan s’utilitza, el controlador es congela i no es fan cap càlcul. Hi ha diverses maneres de resoldre aquest problema. En particular, un d’ells és l’ús de la funció millis (), que retorna un nombre en mil·lisegons des del moment en què funciona el controlador. I com es demora un condicional de 100 milisegons? Per fer-ho, he creat un cicle essencialment buit, la sortida del qual serà només després d’aquests 100 mil·lisegons i, després, el programa continua apagant / desactivant els LED.
Doncs això és tot! Gràcies per llegir aquest article fins al final. Espero que no només us hagi agradat, sinó que també us hagi inspirat un nou mar manualitats i invents!