


Sovint faig robots o joguines a base de Arduino o juntes similars. Com a opció per controlar aquest tipus de dispositius, utilitzo el rang d'infrarojos. En termes del receptor no hi ha problemes, és fàcil de trobar i connectar, però en el cas del comandament a distància és més difícil.
I aquí teniu dues opcions:
1. Utilitzeu el comandament a distància del televisor o d’altres equips disponibles. Aleshores hi ha molta molèstia, problemes i es necessita molt de temps. Primer, heu de llegir els codis de botó del comandament a distància i, després, escriure'ls al firmware. Un altre problema és que el comandament a distància envia un senyal quan es prem els botons una vegada, no el repeteix (si el dispositiu es mou o està lluny, el receptor pot no llegir-lo alhora) i no envia res quan es deixa anar el botó, cosa que és molt inconvenient quan cal controlar la maquinària en moviment. Bé, no vull controlar el televisor i la màquina alhora.
2. fer el teu propi comandament a distància.
Aquesta és la segona manera que vaig a seguir. Per als bàsics, he utilitzat el joystick antic de la consola Sega. Hi ha tot el que necessites. Quatre fletxes (convenient per controlar cotxes) i 8 botons.
Llavors, el que necessitem:
- joystick de Sega
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 bateries Ni-Mn 1,2v 1000mA
- LED IR
- LED vermell
- LED blau
- resistència 2x75Om, 2x5Om, 1x2Om
filferro
- Connector PLSx5 "mare"
- cola calenta
- cables
- compartiment de bateries 4xAAA
- cables multicolors
- soldadura, soldadura, colofona
- braços rectes
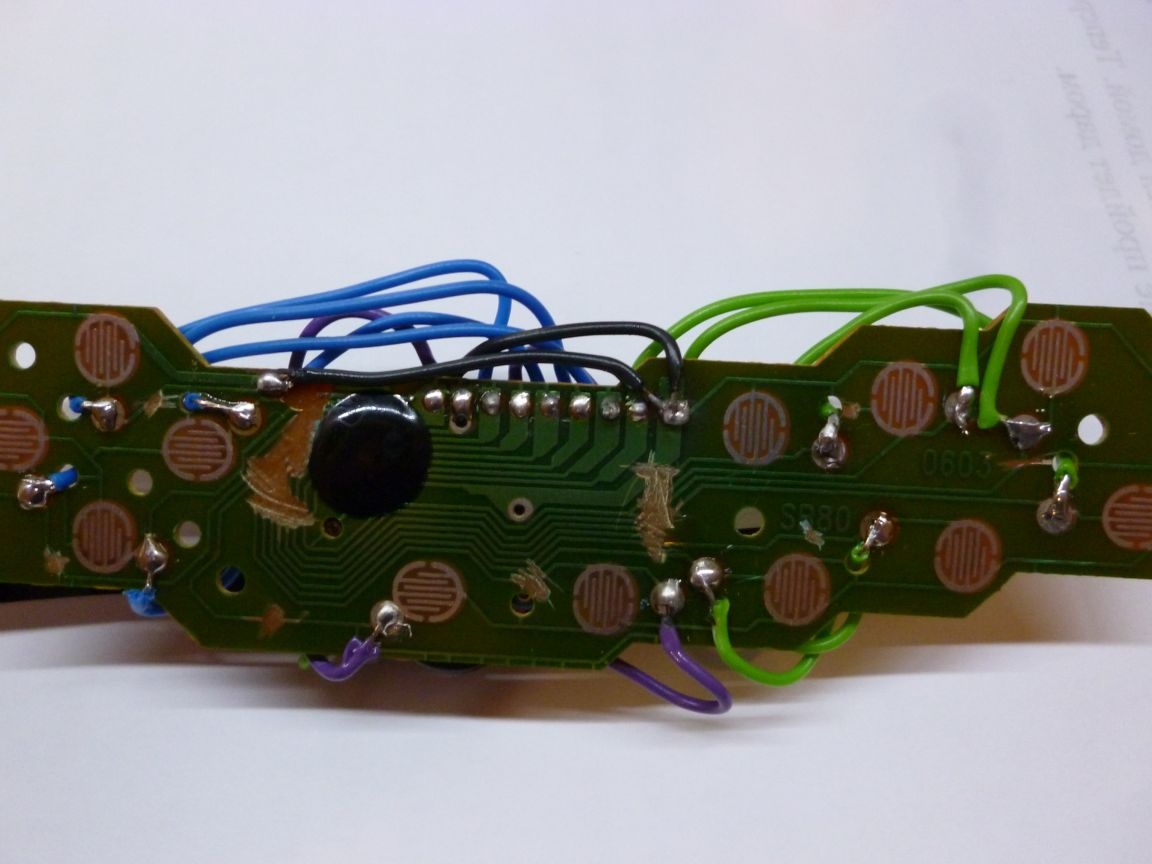
Pas de soldadura 1
Desmuntem el joystick, retirem el tauler i soldem tots els cables. A continuació, heu d’agafar un ganivet clerical o només un ganivet afilat i tallar totes les pistes del controlador que hi ha al tauler perquè no interfereixi amb nosaltres i no entri en conflicte amb Arduino. A prop de cada botó hi ha un petit cercle amb una pista nua. Després d’haver agafat una soldadura, cal soldar a cada tassa al llarg del filferro, a més de trobar un fil comú a la soldadura i un filferro (comú, negre). Empaquetar els fils enrere hauria de tenir un aspecte així:
Al revers, amb una cinta de doble cara enganxem el nostre Arduino. Una petita digressió sobre l’elecció d’Arduino. En principi, podeu fer servir qualsevol placa, el principal és que encaixi dins del joystick.
Soldem els nostres motius segons el següent esquema
Joystick Arduino
Fletxa amunt 2
Fletxa avall 4
Fletxa esquerra 5
Fletxa dreta 6
Botó A 8
Botó B 10
Botó C 7
Botó X 12
Botó Y 11
Botó Z 9
Botó 14 d’inici (A0)
Restableix el botó RST
LED IR + 3
GND genèric
LED blau
mitjançant una resistència prima de 75 ohms
LED vermell
a través de la resistència 75 connectors Om + 5
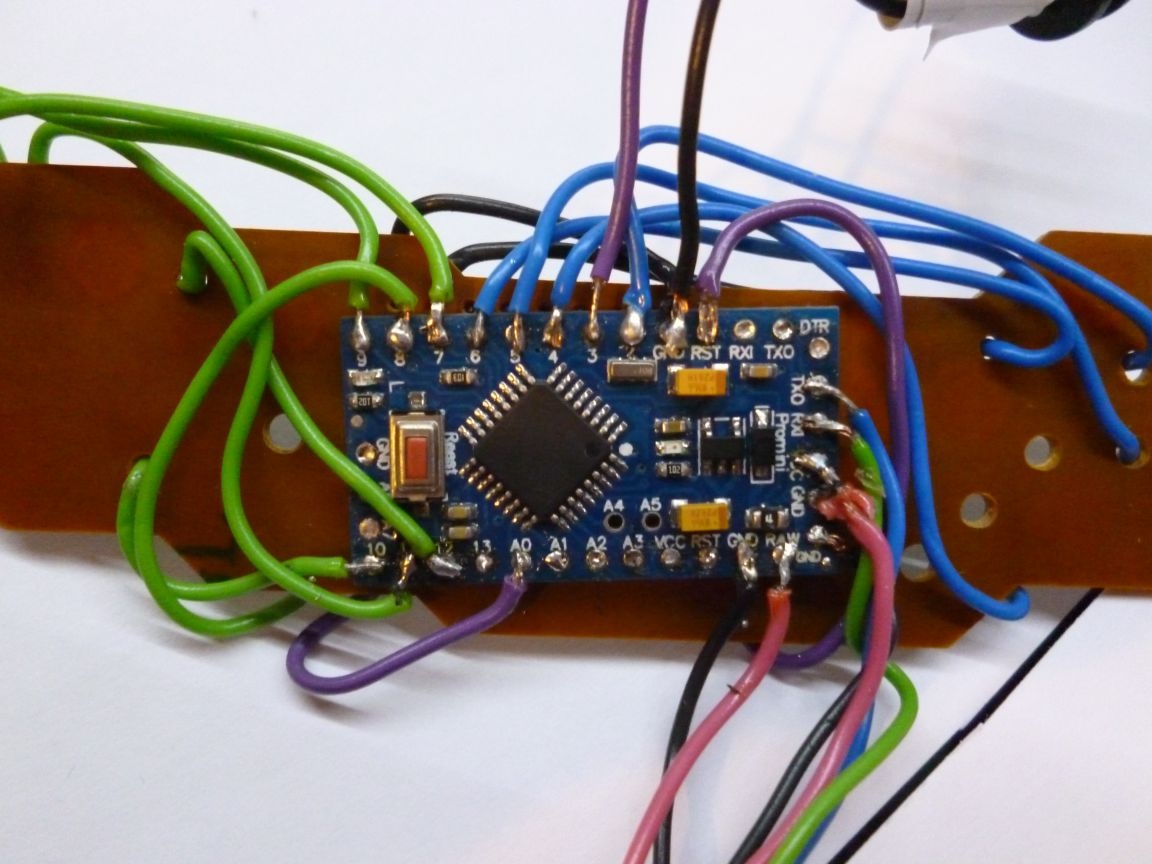
Permeteu-me que us expliqui: he soldat tots els botons com era convenient per cable, si es barrejava, només cal que ho arregleu a la costura. El contacte IR positiu principal s'ha de vendre a 3. Recordeu haver-vos soldat menys IR a GND. El botó Restablir és necessari per reiniciar Arduino amb el firmware.
Mode de cas 2 del pas
Cal pensar en una conclusió de cables per a la connexió de USB-TTL. He utilitzat el connector de 5 "PL" mare. Va fer una ranura de mida adequada a la part dreta del joystick, va inserir el connector i va omplir tot de cola calenta. + 5v d’aquest connector de moment, només cal sortir el fil. TX a RX Arduino, RX a TX respectivament. De +3,4 a 3,3 Arduino, GND a GND Arduino. Va fer una ranura de mida adequada a la part dreta de la palanca de control.

Per indicar la inclusió del comandament a distància i la càrrega de la bateria, cal foradar dos forats amb un diàmetre de 5 mm per davant del joystick i inserir-hi els LED. I també talleu un forat per a l’interruptor.

Per dins, ompliu els díodes i els interruptors amb cola calenta.
Nutrició del pas 3
Així doncs, hi ha dues opcions per a la nutrició. Els vaig fer tots dos, però podeu triar-ne l’adequat i utilitzar-ne un.
La primera bateria encès. Per fer-ho, soldar dues bateries NI-MN en sèrie, a les avantatges a través del commutador, va soldar el següent díode 5Om + 5Om + 2Om + en sèrie i a +5 del nostre connector, això és per a la càrrega des de USB-TTL. Enrotllem la punta resultant del díode i les resistències amb cinta elèctrica i posem la cantonada superior dreta. En paral·lel, soldem el nostre LED vermell mitjançant una resistència de 75 Om per indicar una càrrega. La segona posició de l’interruptor és el cable de treball des que va a la RAW Arduino i de nou en paral·lel, aquesta vegada un LED blau, mitjançant una resistència de 75 Om. Menys directament al GND Arduino.
Les bateries es troben a la part superior del joystick i s’han d’enganxar

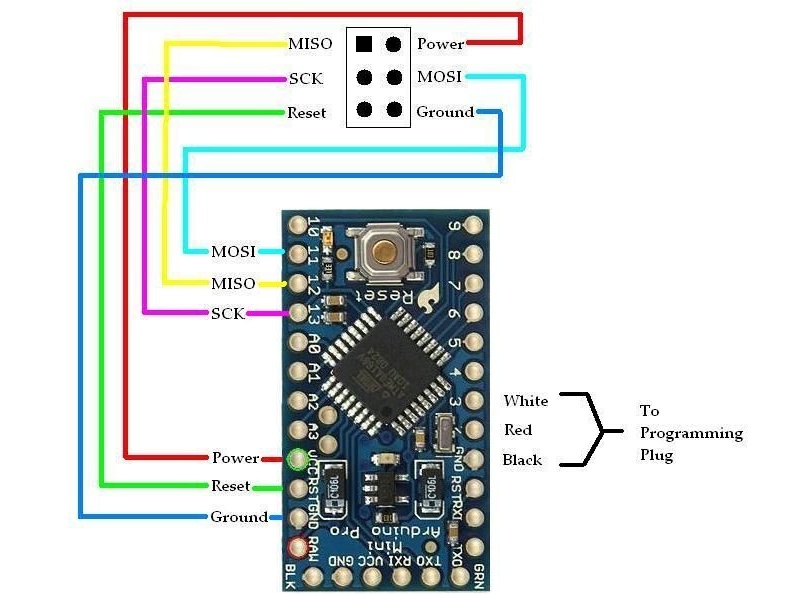
A continuació apareixen les manipulacions amb l’Arduino. El fet és que la tensió de 2,4 volts és petita i, per iniciar el nostre controlador, cal canviar els bits de fusible de l'Arduino. Les instruccions detallades sobre el firmware del carregador d’arrencada i els bits de fusible estan fora de l’abast d’aquest tema i Internet està plena d’esquemes i opcions. El principal resultat aquí és desactivar el control de potència Arduino. Aquí teniu el diagrama de pintures ICSP Arduino Pro Mini.
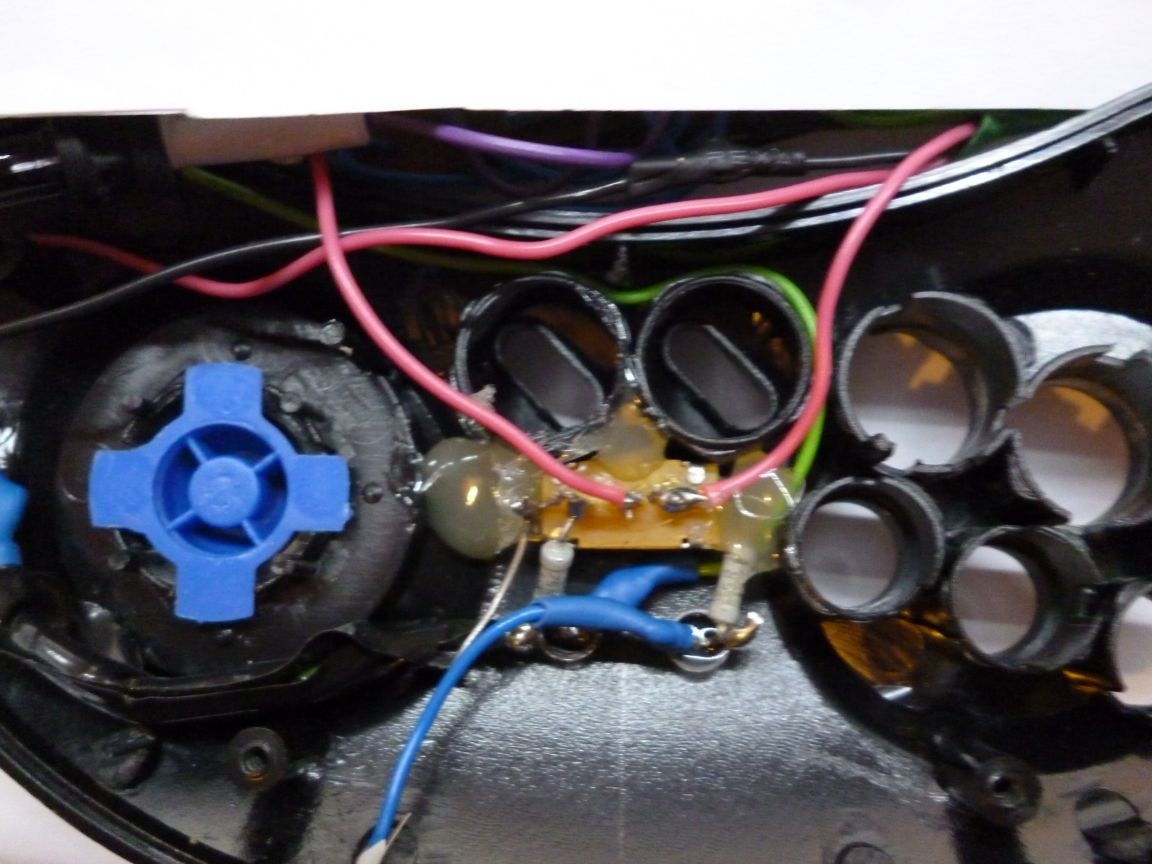
La segona opció és més senzilla i no requereix manipulacions addicionals amb Arduino. Soldador per canviar el fil positiu del compartiment de la nostra bateria, menys al GND Arduino. Traiem els fils fent un petit tall a la caixa i enganxem el compartiment a la coberta posterior del joystick en una cinta de doble cara. Es presenta així:

No sembla molt bonic, però és més ràpid i té menys problemes.
Pas 4 Assemblea
Així doncs, obtenim la següent construcció:
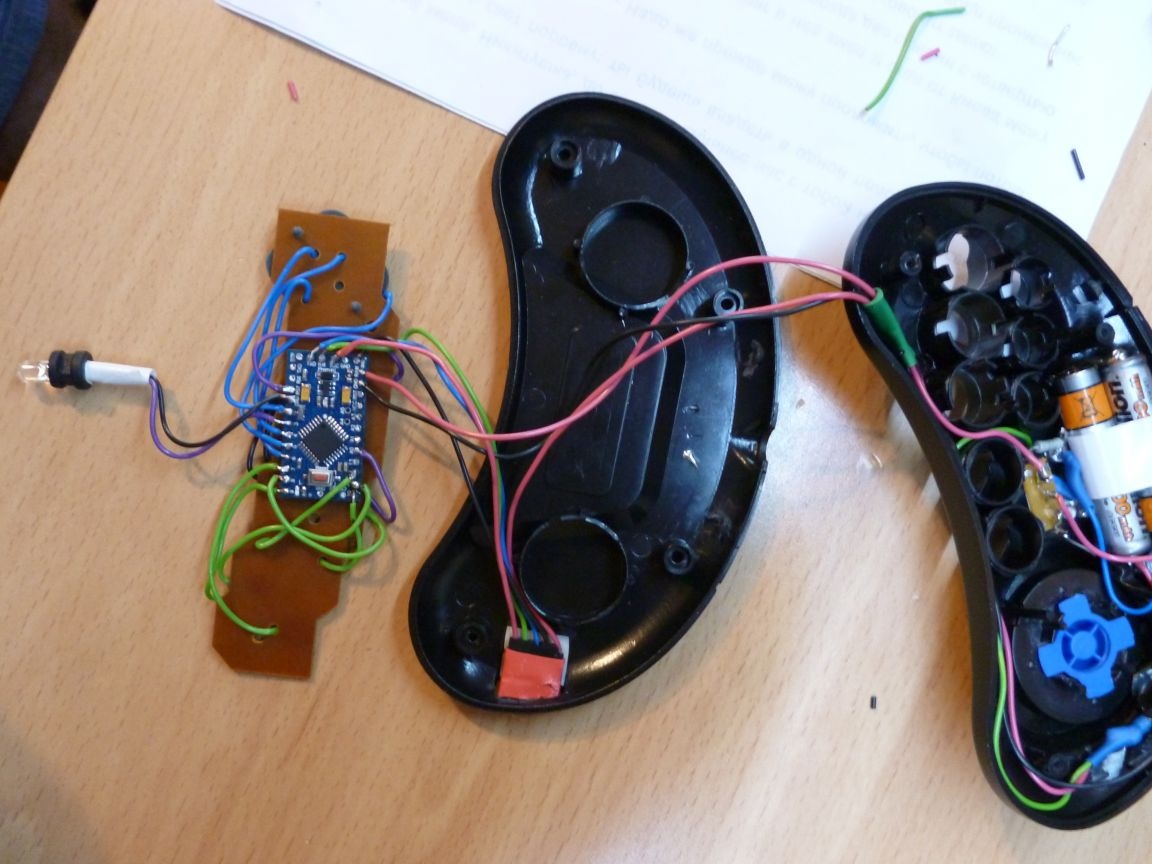
A l’hora de muntar, cal posar els cables per tal que no siguin mossegats per les parts internes del joystick. No vaig tenir èxit de seguida, però després de cinc intents tot funcionarà. Aquí teniu el meu muntatge de control remot.

Firmware del pas 5
El nostre comandament a distància es colpeja a través d’un connector connectat a USB-TTL, la càrrega també és a través d’aquest. No oblideu prémer Restablir en abocar el rascador.
En escriure el firmware, vaig anotar un conjunt aleatori de números (codis) per a cada comanda (botó). Utilitzo aquests codis quan escric el firmware d’un dispositiu gestionat. Els codis s’envien tres vegades, cosa que elimina la possibilitat de saltar-se una ordre. Quan deixeu anar el botó, també s’envia un codi que s’utilitza per aturar el dispositiu gestionat.