


Per tant, comencem Primer cal decidir els components i circuits. El principi de funcionament del circuit és simple: un senyal feble del micròfon s’amplifica i s’envia al pin analògic d’Arduino. Com a amplificador utilitzaré un amplificador operatiu (comparador). Proporciona un guany molt superior en comparació amb un transistor convencional. En el meu cas, el xip LM358 servirà com a comparador, que es pot trobar literalment a qualsevol lloc. I costa bastant barat.
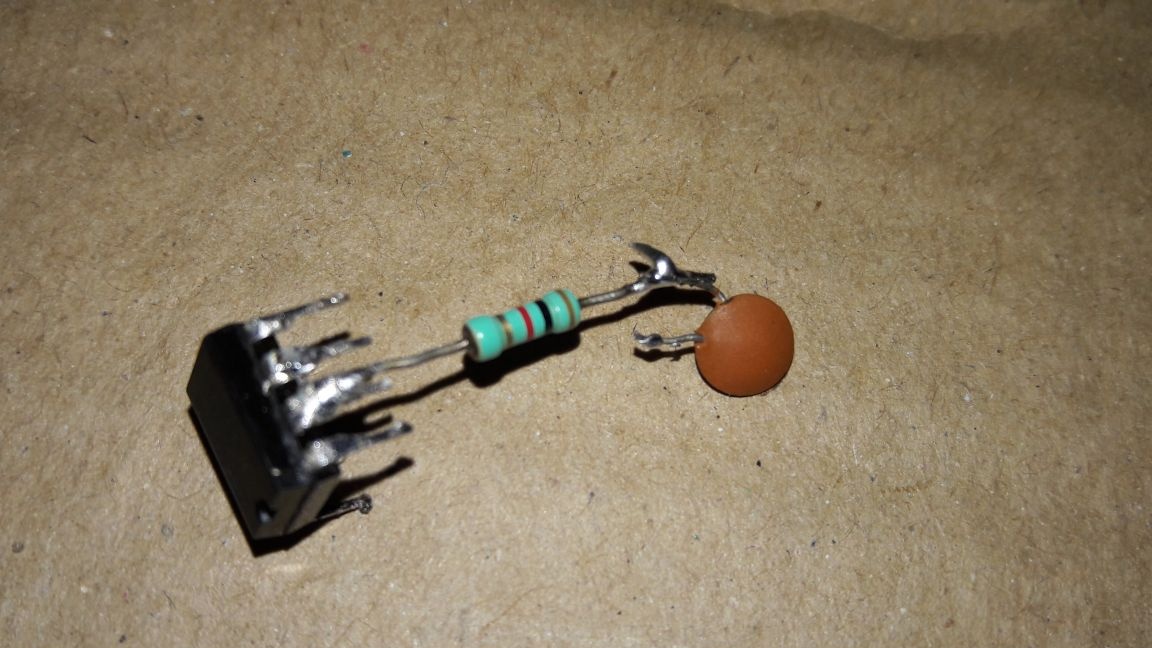
Si no heu trobat el LM358, aleshores podeu col·locar un altre amplificador operatiu adequat. Per exemple, el comparador que es mostra a la foto es trobava a la placa amplificadora del senyal del receptor d’infrarojos al televisor.

Ara mirem el circuit dels sensors.
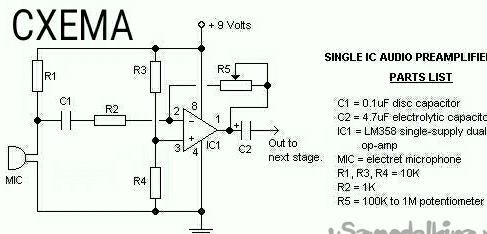
A més de l'amplificador operatiu, necessitarem uns components més fàcilment accessibles.
El micròfon més corrent. Si la polaritat del micròfon no està indicada, mireu només els seus contactes. El menys menys sempre va al cas i, en conseqüència, el circuit està connectat al "terra".

A continuació, necessitem una resistència d’1 kΩ.
Tres resistències de 10 kΩ.

I una altra resistència de 100 kΩ és d’1 MΩ.
En el meu cas, s'utilitza un resistor de 620 kOhm com a "mitjana daurada".
Però ideal, cal utilitzar un resistor variable de la qualificació adequada. A més, com es demostra en els experiments, una qualificació més gran només augmenta la sensibilitat del dispositiu, però apareix més "soroll".

El següent component és un condensador de 0,1 uF. S'etiqueta "104".

I un altre condensador, a 4,7 uF.
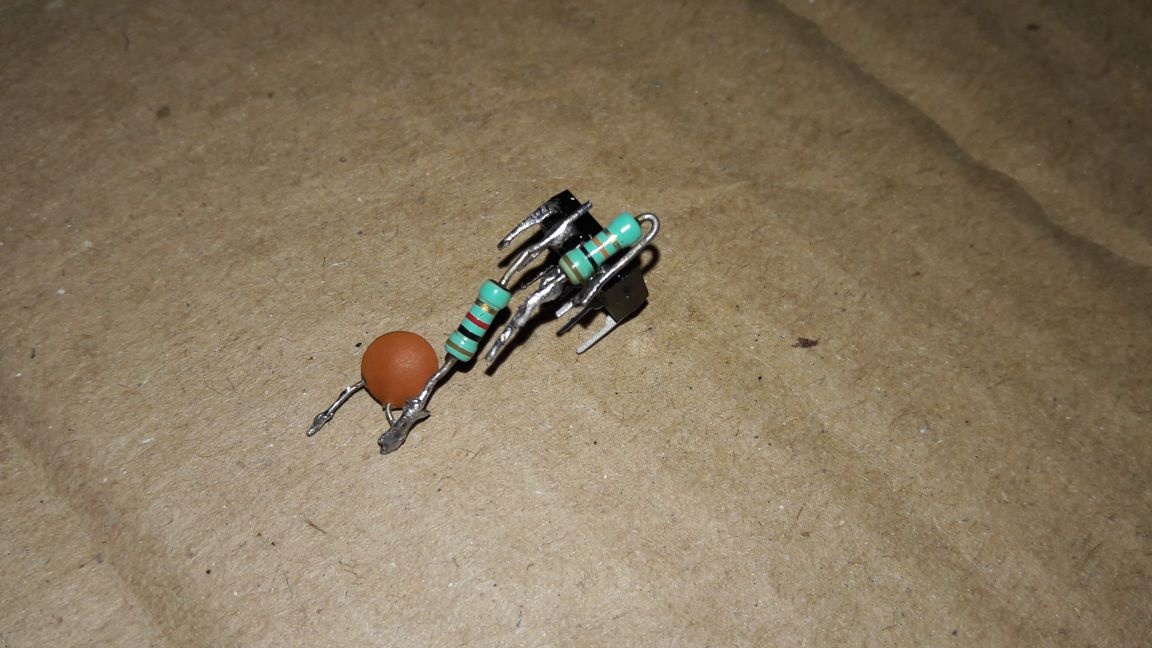
Ara passem al muntatge. Vaig muntar el circuit amb una instal·lació muntada.








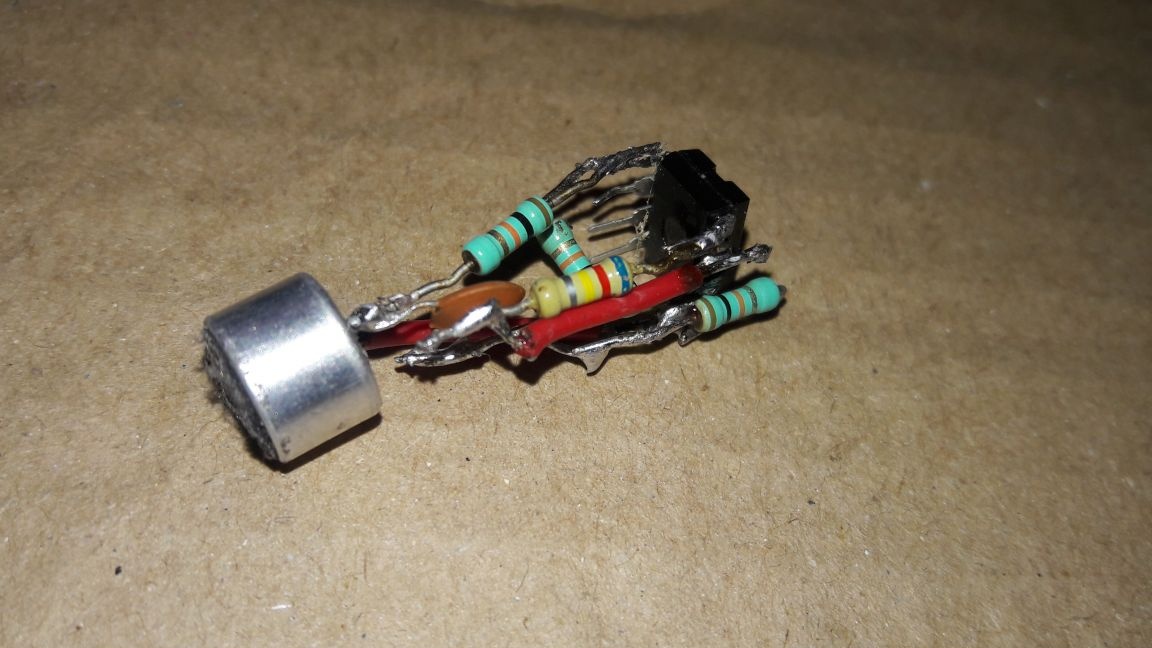

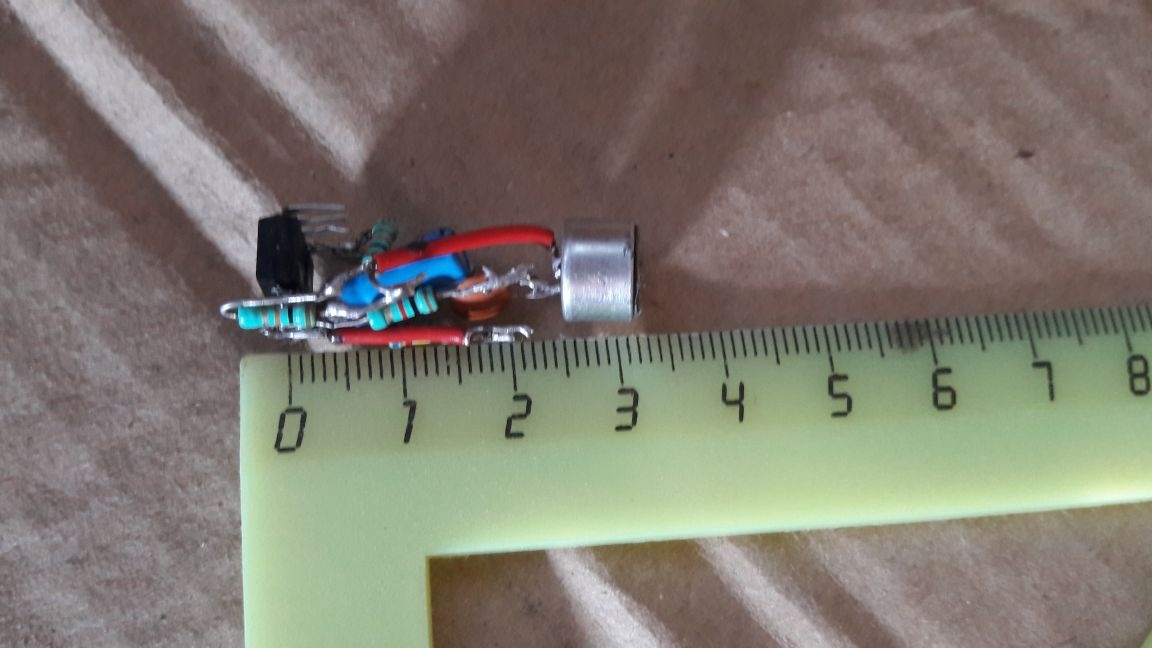
S'ha completat el muntatge.Vaig instal·lar el circuit en un estoig que vaig fer a partir d’un petit tros de tub de plàstic.
Procedim a provar el dispositiu. La connectaré a la pissarra Arduino UNO. Ens endinsem a l’entorn de desenvolupament d’Arduino i obrim l’exemple AnalogReadSerial a la secció Fonaments.
void setup () {
Serial.begin (9600); // connectar la connexió en sèrie a 9600 baud
}
void loop () {
int sensorValue = analogRead (A0); / * llegir el valor del pin analògic zero i guardar-lo al sensor variable Valor * /
Serial.println (sensorValue); // emet el valor al port
retard (1); // esperar un mil·lisegon d’estabilització
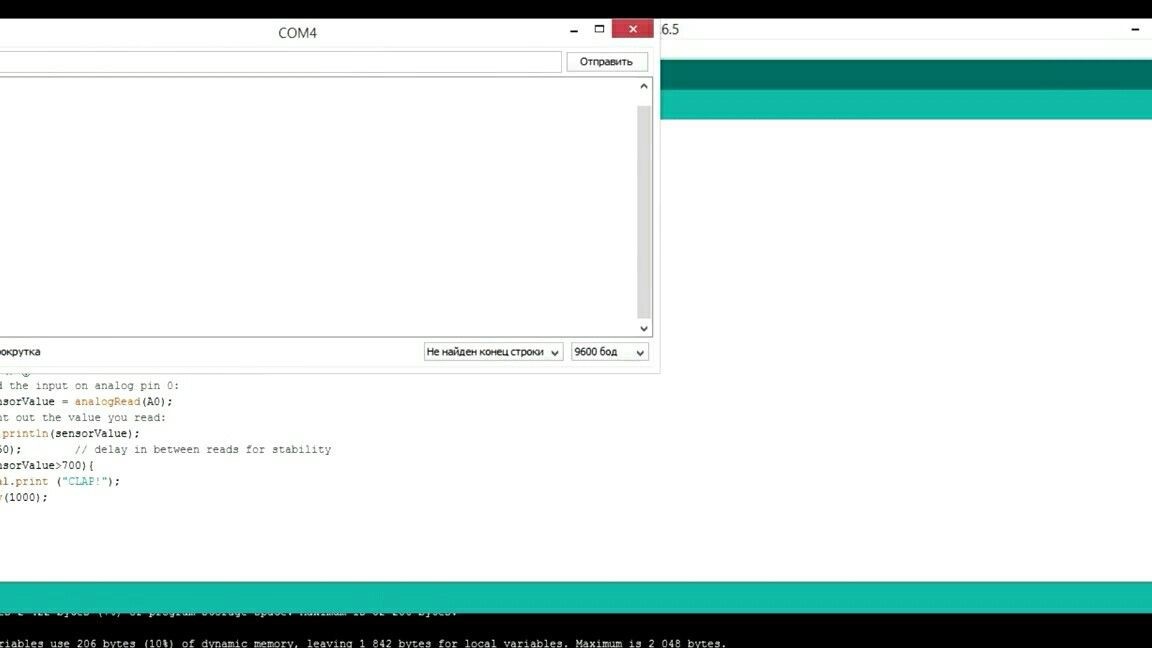
}Abans de carregar a la pissarra, canviem el retard en 50 mil·lisegons i el carreguem. Després d’això, fem un cotó de prova i seguim les indicacions. En el moment d’aplaudir, salten, intenten recordar aproximadament aquest valor i tornen al croquis.
Afegiu un parell de línies al croquis.
if (sensorValue> X) {
Serial.print ("CLAP");
retard (1000);
}En lloc de "X", introduïu de nou el mateix valor, carregueu i aplegueu. Per tant, continuï fins que trobeu el valor de resposta òptim. Amb un valor sobreestimat, la condició només es complirà amb cotó a una distància molt propera. Amb un valor inferior, la condició es satisfarà amb el mínim soroll o el so dels passos.
A més, amb la correcta selecció de la resistència R5, aquest sensor es pot convertir en un digital i es pot utilitzar en interrupcions de maquinari. El potencial d’aquest disseny és enorme, per la seva base es poden muntar diversos projectes i la seva senzillesa fa que el dispositiu sigui accessible a tothom.
En conclusió, proposo veure un vídeo en què es mostra tot clarament. El procés de calibració i el muntatge de l’interruptor de cotó més senzill també s’expliquen amb molt més detall.
Espero que us hagi agradat. Us desitjo un muntatge d’èxit!