

L’autor va basar aquest projecte en una versió més senzilla. casolans vaixells, i el va perfeccionar. Es posen sensors a l’embarcació per evitar obstacles i per entrar a la llum. Com s’utilitza el controlador de l’embarcació Arduino, un sensor d’ultrasons s’instal·la al davant i els sensors de llum es situen als laterals. Aquest senzill vaixell no s’estavella a les parets i està controlat per una llanterna.
Materials i eines:
- Cinta aïllant / cinta adhesiva
- Termoglú amb cola calenta
- Motors de corrent continu de 2 peces
- Ampolles de plàstic 2 peces
- cables
- Petites hélices 2 peces
- Arduino, ordinador i cable USB
- Caixa de plàstic
- Bateria i connector de 9 V
- Diodes de potència (tipus 1N4004)
- Resistors
- MOSFET de transistor o TIP 120
- Dues fotocèl·lules i dos botons
- tisores
- Soldadura amb soldadura

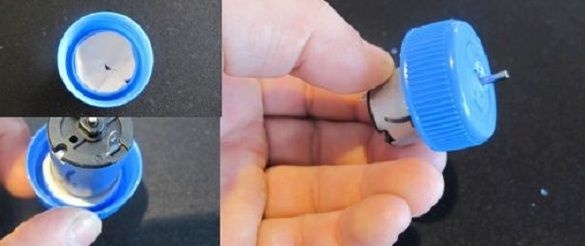
Pas 1. Instal·lació de motors.
Es treuen les tapes de les ampolles i es fa un forat a cadascuna d’elles. Dins de la coberta, l’autor esprima cola calenta sense tancar els forats. Va col·locar l’eix del motor al forat i el va posar sobre la cola. Després que la cola s’asseca, l’eix gira lliurement. El mateix procediment es produeix amb la segona coberta.
Pas 2. Fixació de les ampolles.
Les ampolles es van unir mitjançant el principi d’una bassa amb l’ajut de tres tires de cinta adhesiva.

Pas 3. Soldadura als motors.
Com que els motors muntats als endolls no tenien cables, calia soldar-los, la longitud dels cables era d’uns 25-30 cm.

Pas 4. El tall a les ampolles.
Per tal que els cables caiguin al casc de la barca, es fa una petita ranura des de la seva part superior.

Pas 5. Fixació dels motors.
A més, l’autor retorça les tapes a les ampolles, ja que no es torcen bé, vaig haver d’utilitzar cola calenta. Els fils s’empenyen pels forats preparats a les ampolles.

Pas 6. Cas.
Una caixa de plàstic s’enganxa a dues ampolles. En aquesta capacitat per a l'electrònica, podeu fer forats per als cables o subjectar els cables per la part posterior de la caixa. Els forats dels cables de les ampolles estan aïllats amb adhesiu de fusió calenta.

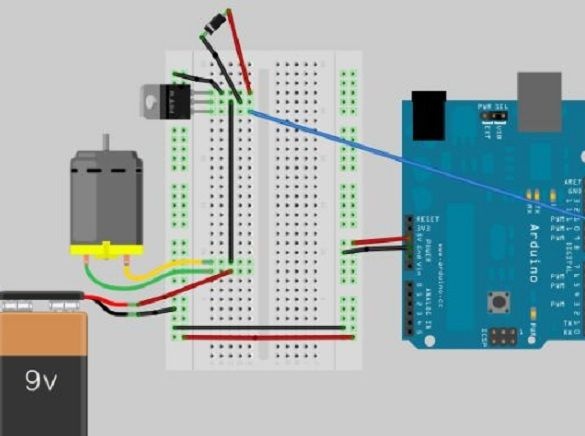
Pas 7. Esquema de cablejat.
El circuit utilitza un transistor TIP 120 com a commutador (podeu utilitzar transistors MOSFET o Darlington similars). S'utilitza per canviar la càrrega quan es consumeix una gran quantitat de corrent, ja que l'Arduino no té prou potència per als motors. Aquest circuit es munta per al primer i després per al segon motor (no és necessària una altra bateria per al segon motor).
Pas 8. Sensors.
El sensor d’ultrasons és excel·lent per a la part davantera de l’embarcació, adverteix d’obstacles en el camí. Les fotocèl·lules actuen com a antenes i serveixen perquè el vaixell floti a la llum.Els botons dels costats s'utilitzen com a sensors d'obstacles. També podeu modificar el codi i utilitzar altres sensors, com ara infrarojos.

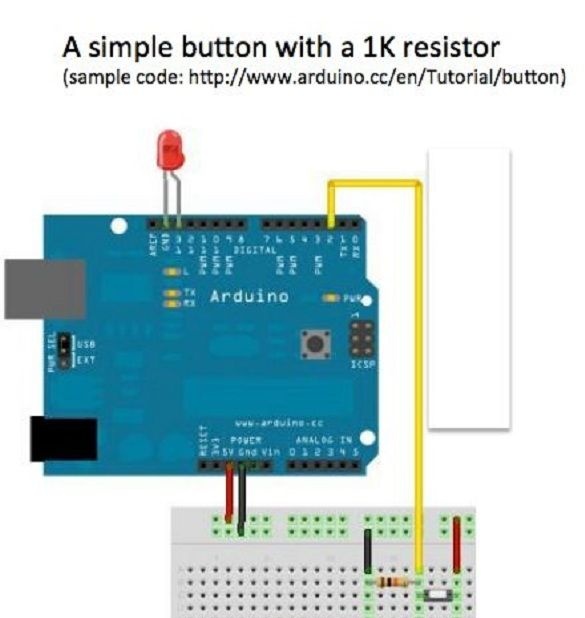
Pas 9. Esquemes de sensors.
El diagrama mostra la connexió d’un simple botó i una resistència 1K. Es repeteix l’esquema d’ambdós botons, els botons es col·loquen a banda i banda de l’embarcació. Ells seran els responsables de canviar el moviment de l’embarcació en col·lisió.
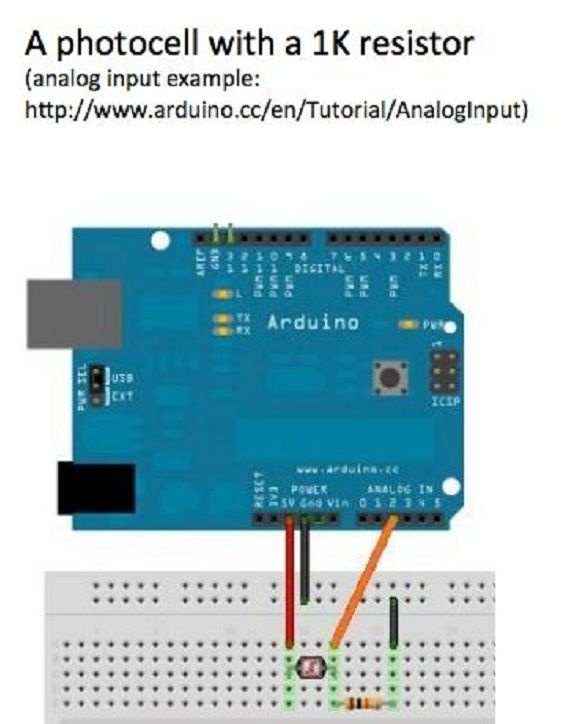
La figura següent mostra un circuit amb resistència i fotocèl·lula 1K. L’autor la va realitzar dues vegades i va col·locar les fotocèl·lules als costats oposats de l’embarcació.
Pas 10. Codi del programa.
L'autor va oferir l'oportunitat de descarregar-ne el codi per utilitzar-lo, donant així una funcionalitat bàsica a aquells que van a muntar un vaixell. El codi inclou suport per a fotocèl·lules, telescriptor i botons. El vaixell intentarà evitar obstacles davant seu mateix i gira en sentit contrari quan es troba amb obstacles des del costat. Si no hi ha voluntat d’utilitzar tot el conjunt de sensors, només alguns d’ells tenen un codi per a cada separat. Podeu descarregar tots els codis de l'article.
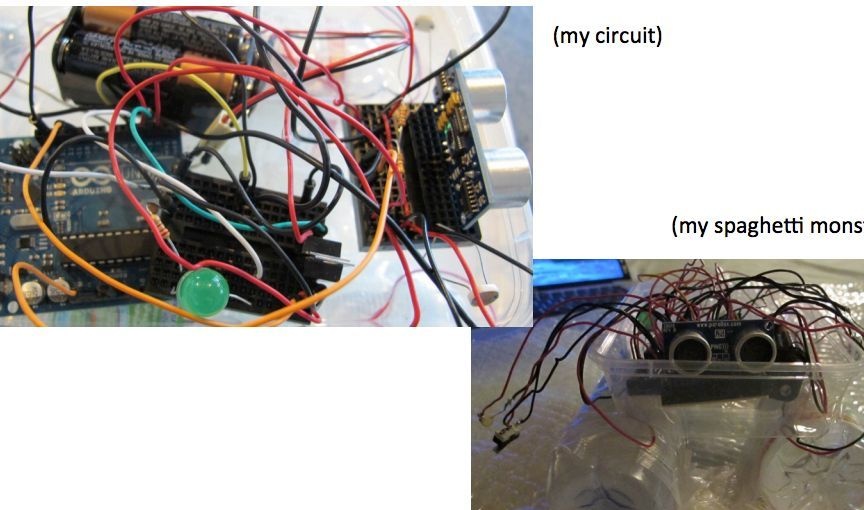
Pas 11. Muntatge del vaixell.
Circuit muntat, Arduino i bateries estan en caixa.
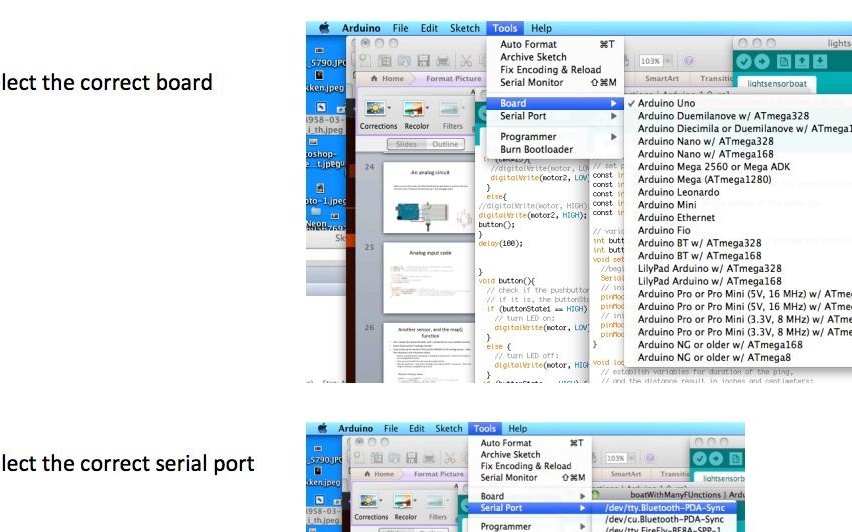
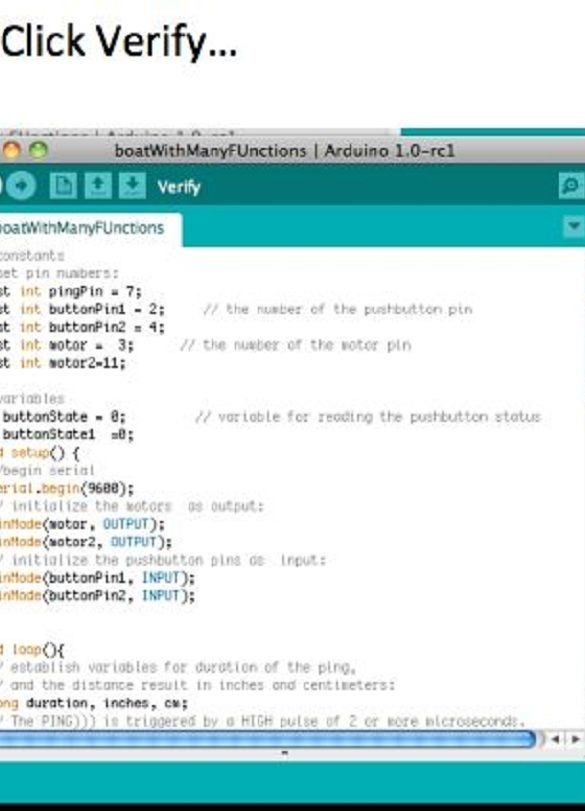
Pas 12. Descarregueu l'esbós.
A continuació, s’obre l’AIDE Arduino, seleccionant el fitxer i el port correctes, després l’autor va compilar i carregar el codi al controlador.
Pas 13. Resistència a l’aigua i prova.
L’autor també va aïllar tots els llocs potencials d’entrada d’aigua amb cola calenta. Aïlla també tots els cables de curtcircuit. El recipient amb Arduino es cobreix amb la mateixa caixa i es segella amb cinta elèctrica. Les hélices estan fixades als motors. Aquí el vaixell està a punt, ara podeu començar a provar-les a l’aigua.



Vídeo amb una prova preliminar del vaixell: