
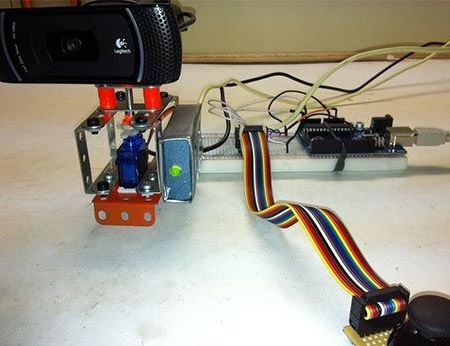
Aquest article parlarà sobre com utilitzar-lo Arduino pot controlar la càmera web. Més precisament, el control serà un servo drive, que s’instal·la en el fotograma del dissenyador al qual ja s’adherirà la càmera web.
Materials utilitzats per l’autor per crear aquest dispositiu:
1) constructor metàl·lic
2) soldadura en fred
3) càmera web
4) servo
5) LEDs
6) Arduino
8) joystick de PS3
Considereu amb més detall el disseny i els principals punts de creació d’un dispositiu per controlar la càmera.
Desconcertat per la qüestió de com utilitzar una plataforma Arduino tan còmoda a més de funcions estàndard com ara llums intermitents. Un cop mantingut una conversa a través de Skype amb un company de feina, l’autor es va plantejar una idea interessant. Què passa si dónes als seus companys l’oportunitat de controlar una càmera web i veure què passa a l’oficina. Res més aviat que fet i l’autor va començar a treballar en la implementació d’aquesta idea.
Inicialment, l’autor va estudiar els principals materials d’articles on s’utilitzava un joystick per controlar les unitats creades a la plataforma Arduino. Després d’haver entès el material d’aquests articles, l’autor es va adonar que podia utilitzar l’antic joystick de la PS3 per controlar els moviments del servo des d’ell.
A partir de la construcció, l’autor va decidir construir un fotograma en el qual s’hi col·locaran el servoaccionador i la mateixa càmera. Per tal de no complicar la tasca, l’autor va decidir utilitzar el constructor de metall habitual, que va comprar en una botiga de prosperitat.
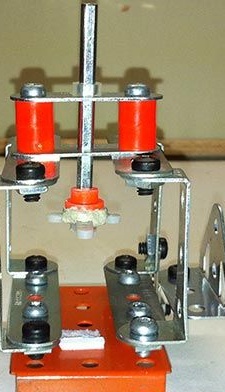
Prenent els detalls d’aquest constructor, va resultar crear un fotograma del futur dispositiu:
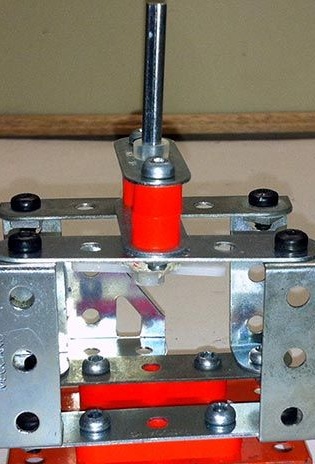
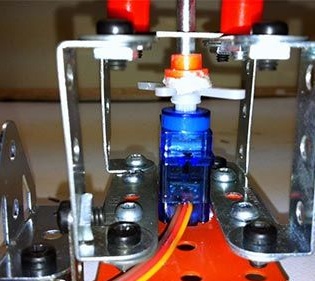
A l'interior del marc es va instal·lar un servoaccionador. Com es pot veure a la foto, encaixa perfectament en el marc creat. Per fixar el servo al marc, l’autor va utilitzar cinta de doble cara. Mitjançant la soldadura en fred, es va connectar l’eix servo a l’engranatge, que controla el moviment de la plataforma amb la càmera.
És important garantir que el disseny de la transmissió es faci fins i tot de manera que no hi hagi una càrrega innecessària.
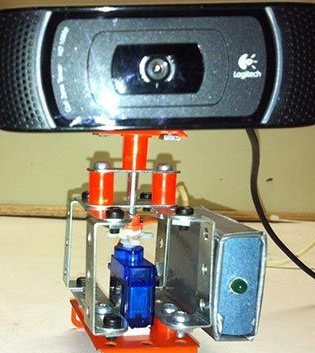
Aleshores l’autor va començar a instal·lar la càmera web. Es va utilitzar una càmera Logitech, que s’utilitza a l’oficina de l’empresa on treballa l’autor. Per tant, degut al fet que la càmera no pertany a l’autor, no la va desmuntar i va treure el contrapès, tot i que això simplificaria el disseny del futur dispositiu.

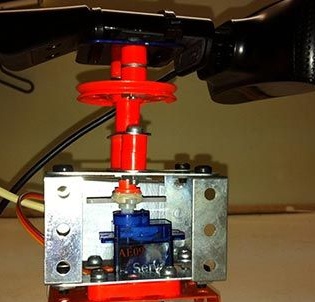
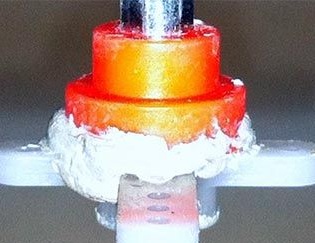
Per compensar d’alguna manera el pes de la càmera i distribuir-la al centre de l’estructura, l’autor va utilitzar dues juntes gruixudes. Permeten canviar el pes de la cambra de l’eix servo al bastidor principal i també eviten la pressió de l’eix sobre la cambra mateixa.
La càmera està muntada en una plataforma rodona especial, basada en un eix procedent del servoaccionament. D’aquesta manera, el control de la càmera es realitza mitjançant una transmissió creuada.
Després que la part mecànica de l'estructura estigués a punt, l'autor la va agafar e farcit
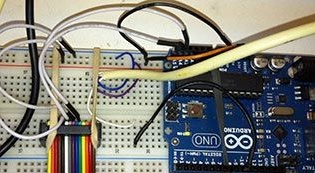
Per començar, va decidir connectar servos i leds que mostraran l'estat del sistema.
El servomotor té 3 cables: -GND, + 5V i Senyal. L'autor va utilitzar 9 pins per adonar-se de la capacitat de controlar la unitat. Per fer un indicador d'activació de la unitat, l'autor va instal·lar un díode connectat a dos cables: + 5V i GND amb una resistència a la línia + 5V.

A continuació, a partir d’articles a Internet, l’autor va preparar un joystick trencat des de la PS3 per controlar la unitat.

A continuació, l’autor va recollir un programa per a Arduino, gràcies al qual es pot fer servir el joystick i el port USB per controlar el servo. Per comunicar-se amb un port USB, l’autor va utilitzar control de mòdem i un emulador de terminal d’aplicacions com Minicom o Putty.
Aquest programa ofereix diverses funcions per controlar la càmera.
Per instal·lar la càmera al centre de 90 graus, heu de prémer "m", la càmera arribarà automàticament a aquesta posició quan enceneu l'alimentació del servo. Per girar la càmera cap a l'esquerra, cal prémer la tecla "F" i, prement el botó "J", es gira la càmera cap a la dreta.
Podeu descarregar el programa al final de l’article.
Atès que l'autor no va treballar especialment el disseny del dispositiu de rotació de la càmera, va començar a tenir alguns desavantatges.
Per exemple: ja que la càmera no es fixa en el marc, quan es basta, pot caure des de la plataforma; ja que el servo és força reduït, el parell de la càmera crea una rotació addicional, que al seu torn deforma el servo; els forats del eix servo són massa grans, de manera que no és estàtic i també està sotmès a tensions.
Per tant, en el futur, l’autor vol actualitzar lleugerament el dispositiu de la següent manera: assegureu-vos que la rotació de la càmera estigui controlada per les fletxes del joystick, i no pels botons; alleugerir la càrrega sobre el servo quan es fa una vira.