Carpet Crawler és un petit robot pertanyent a la classe BEAM. Tal robots inclou immediatament dos elements com l'estètica, la biologia, electrònica i mecànica. Gràcies a aquest enfocament, aquests robots imiten les criatures vives al màxim possible, de vegades sembla que són capaços de pensar.
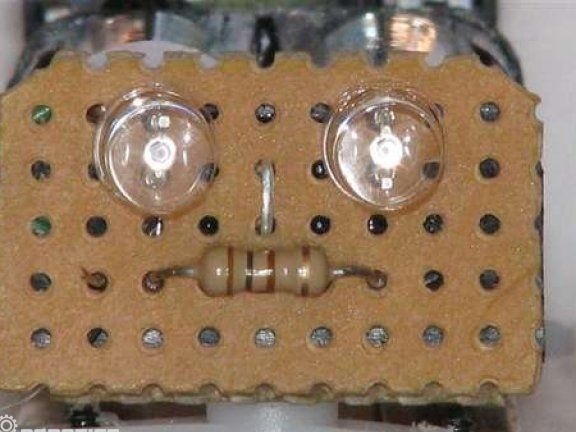
Com a cervell per a aquests robots es fan servir els relés i els commutadors, i es mouen casolans degut al servomotor. Les bateries AAA s’utilitzen com a potència. A mesura que els ulls cremen brillantment, hi ha instal·lats dos leds.
Materials i eines per a la fabricació:
- franja de llautó de 1/32 "x 1/4" x 8 ",
- dues peces de tires de coure;
- M2 i fruits secs;
- servomotor (Micro RC (7,5 g));
- dos microinterruptors (es poden obtenir amb unitats antigues);
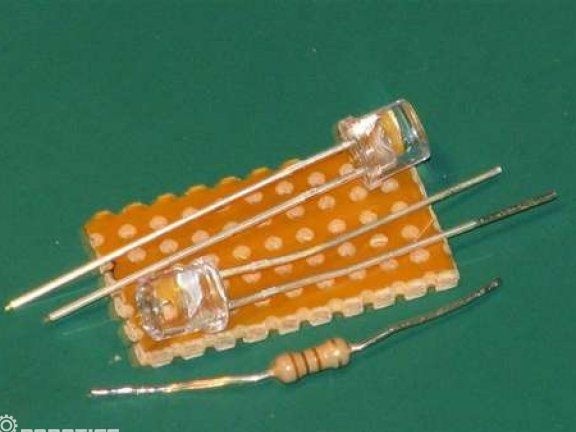
- dos LED (el millor és utilitzar vermell, perquè en aquest cas pot funcionar blanc o blau);
- una resistència 100R (si els LED són grocs o verds, aleshores 47R);
- dues bateries AAA i un suport per a ells;
- cablejat prim.




Procés de fabricació:
Primer pas. Alteració del servomotor
El servomotor està dissenyat de tal manera que durant el funcionament fa moviments impulsius. En aquest cas, s'ha de tornar a redreçar perquè funcioni en rotació. Hi ha dues maneres de fer-ho.
En el primer cas, podeu estalviar velocitat i direcció del control del motor, així com de l'electrònica de control. El dispositiu encara necessitarà polsos entrants per funcionar.
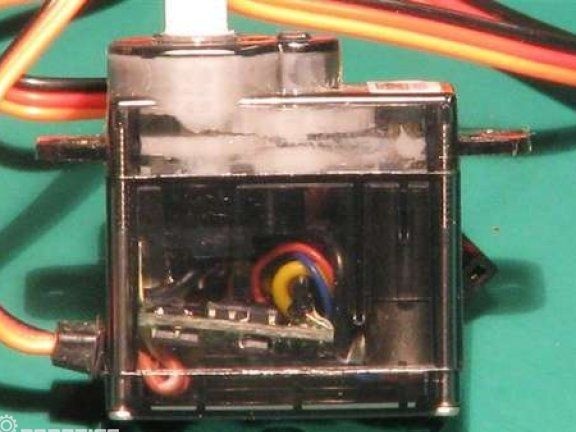
L’autor va anar a l’altra banda. Cal tallar l’element d’aturada dels engranatges. Llavors cal alinear els engranatges, si es perd la seqüència serà difícil muntar-los. En desmuntar, la superfície del servomotor s'ha de lubricar amb greix de silicona.
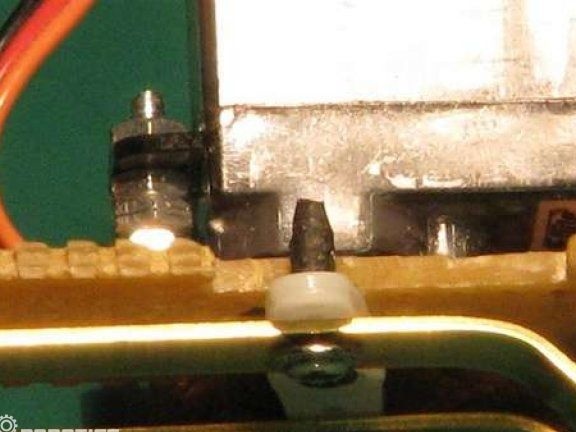
La imatge mostra el mecanisme de control RSV que cal moure.

Després de treure la placa, s’ha de canviar el fil vermell a exactament aquell fil vermell del motor. Els cables s’han d’embolicar amb cura amb cinta elèctrica per evitar els curtcircuits.

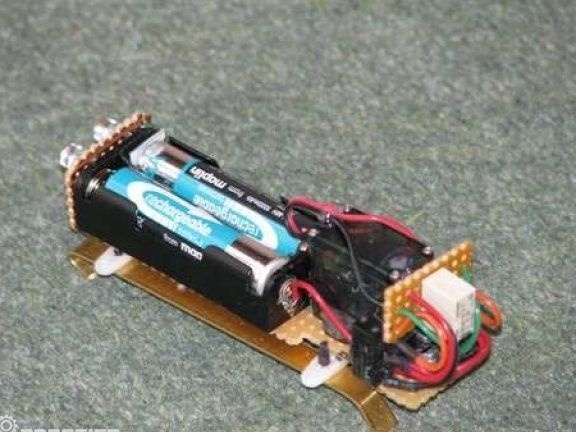
Pas Segon Crea la part mecànica
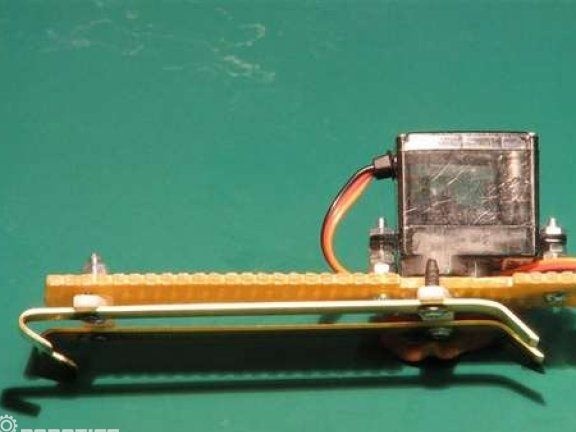
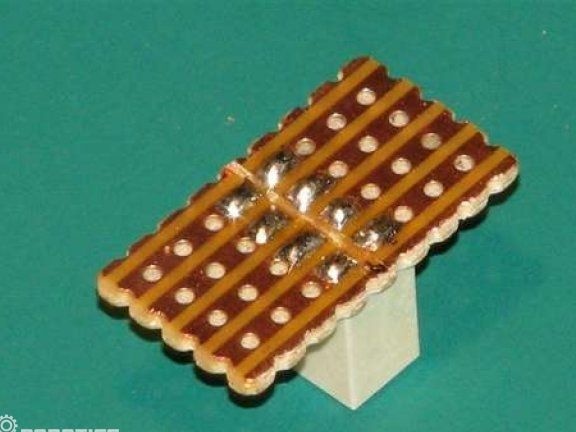
Al tauler de treball, heu de foradar diversos forats i, a continuació, instal·lar el relé a la part posterior de la bateria.S'utilitzen cargols de 2 mm per fixar el servo.
Les potes del robot estan fetes de plaques de coure sòlides, per a això es tallen per primer cop en trossos d’una longitud determinada i es fan corbes. Gràcies a aquests desviaments, el robot s’aferrarà a la carretera i s’arrossegarà. Fixeu la placa amb cargols petits.


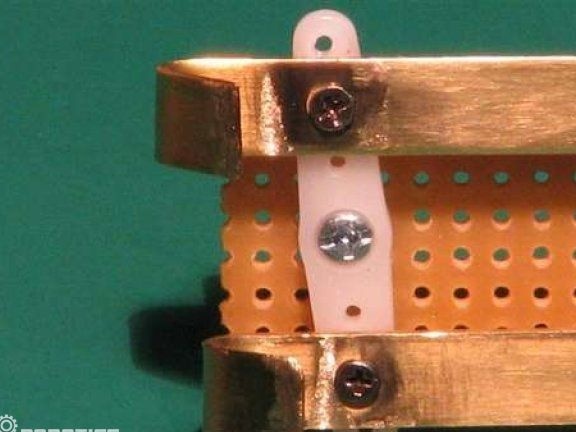
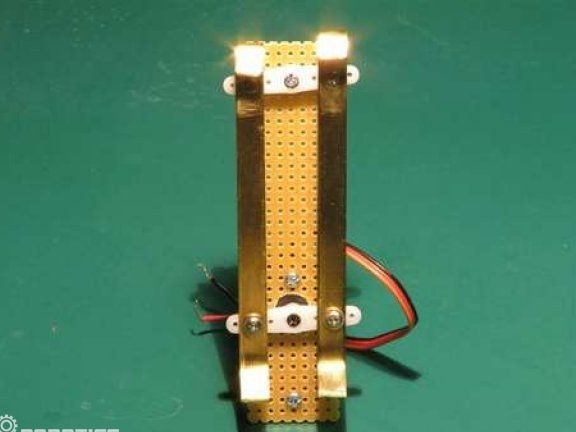
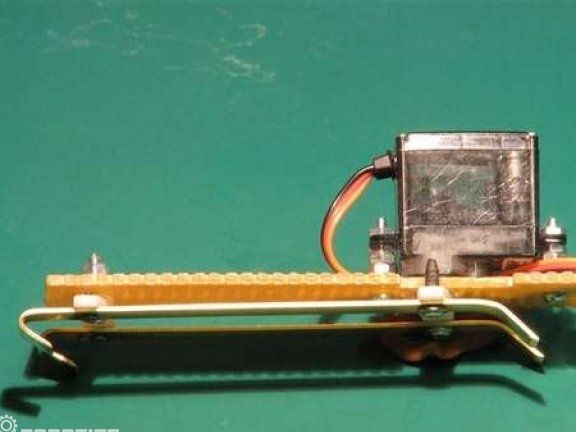
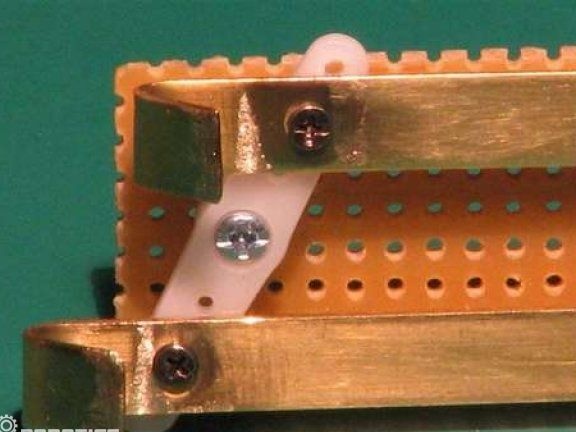
Per controlar les potes cal ajustar els interruptors. Estan units al servomotor amb cola.
Tercer Pas Circuit electrònic de robot
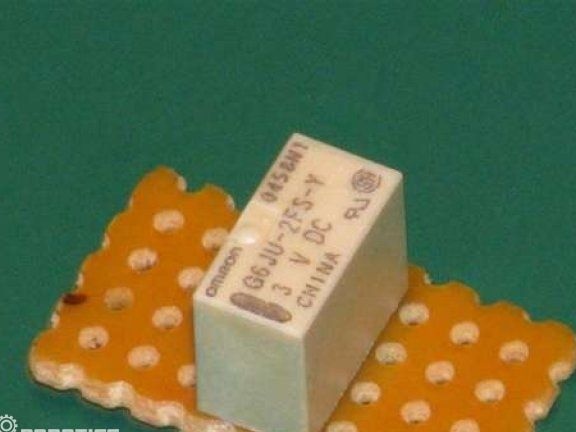
El component principal en el treball dels casolans es pot considerar un relleu-tancament, que funcionarà quan es desconnecti de la bobina. El relé canviarà de moviment, però romandrà en un lloc fins al següent torn.
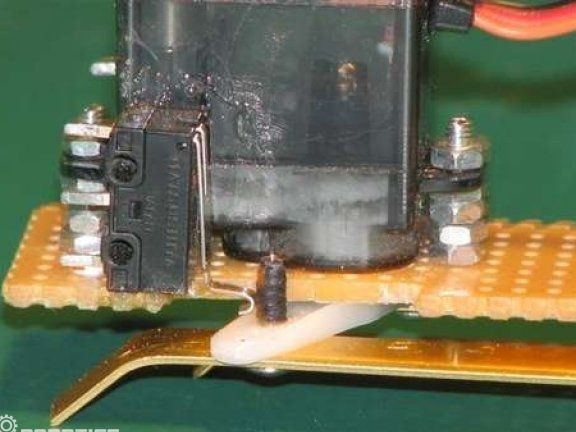
Els polsos a les bobines provindran de dos microinterruptors, que s’encendran quan el relé de l’antena caurà sobre l’interruptor.

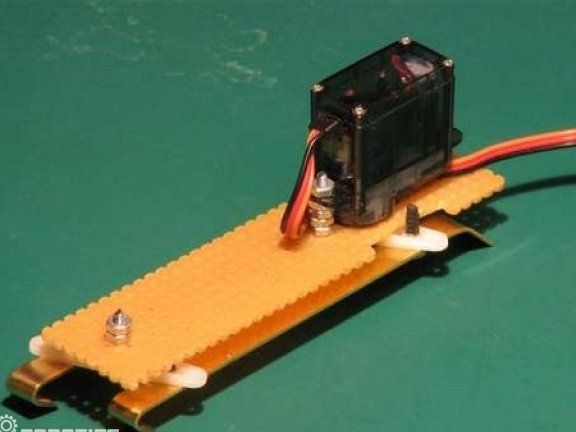
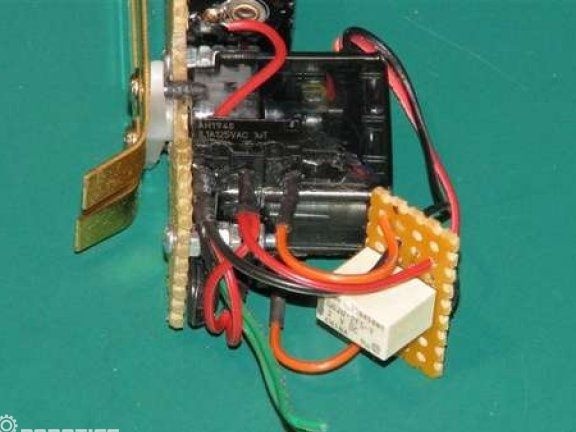
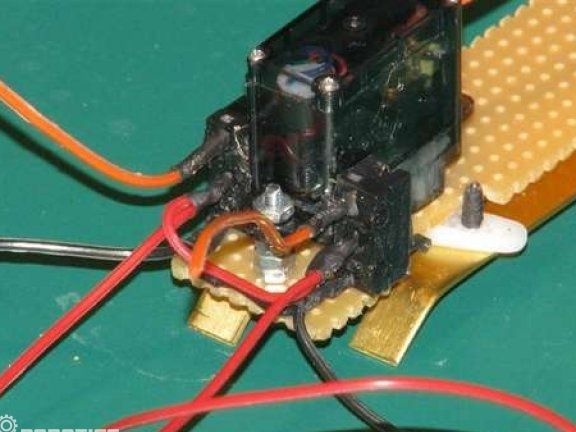
Quatre pas Muntatge de la part electrònica
El relé està muntat en una ferralla en una placa, de manera que és més fàcil de connectar. A la foto es mostra tot el procés de connexió d’electrònica.





Tot això, ara el robot està a punt. El millor de tot, semblarà ell mateix a la superfície de la catifa, ja que està dissenyat específicament per a aquests llocs. Primer, el robot ha d’il·luminar els LED i, després, s’arrossegarà lentament pel terra.