Un magnetòmetre, de vegades també anomenat gaussímetre, mesura la força d’un camp magnètic. Es tracta d’una eina important per comprovar imants permanents i electroimants i per comprendre la forma de les configuracions de camp dels imants no estàndards. Amb una sensibilitat suficient, també pot detectar objectes de ferro magnetitzat. Si la sonda és prou sensible, es poden detectar camps que varien el temps de motors i transformadors.
L’assistent us explicarà com fer un magnetòmetre portàtil senzill amb components comuns: un sensor Hall lineal, Arduino, visualització i botó. El cost total és inferior a 5 euros, i la sensibilitat és de ~ 0,01 mT en el rang de -100 a + 100 mT. Això és millor del que podríeu esperar d’un dispositiu d’aquest tipus. Per obtenir lectures precises, calibreu l’instrument i l’assistent també descriu aquest procés.
Eines i materials:
-SS49E sensor Hall lineal;
-Arduino Uno;
-SSD1306 - Pantalla OLED monocroma de 0,96 ”amb interfície I2C;
-Butó micro;
- Bolígraf;
-3 cables de corda fina;
Tub retret de 12 cm (1,5 mm) prim;
-Cajet plàstic (18x46x83 mm);
-Ambuta;
-Battery 9V;
-Portera de bateria;
Primer pas: Teoria
Podeu utilitzar un telèfon intel·ligent per mesurar el camp magnètic. Els telèfons intel·ligents solen contenir un magnetòmetre de 3 eixos, però sol optimitzar-se per a un feble camp magnètic de la Terra ~ 1 Gauss = 0,1 mT. No se sap la ubicació del sensor al telèfon i no és possible col·locar el sensor dins de forats estrets, com el forat d'un electroimant.
L’efecte Hall és una forma habitual de mesurar camps magnètics. Quan els electrons flueixen a través d’un conductor en un camp magnètic, es desvien lateralment i així es crea una diferència de potencial als costats del conductor. Amb l’elecció correcta del material i la geometria del semiconductor, s’obté un senyal mesurable, que es pot amplificar i es pot assegurar la mesura d’un component del camp magnètic.
L’assistent utilitza un sensor SS49E barat i àmpliament disponible.
Aquí teniu les seves característiques:
• Eficient energètic
• Interfície de PCB convenient
• Sortida estable de baix soroll
• Gamma de tensió de subministrament des de 2,7V CC fins a 6,5 V CC
• Sensibilitat 1,4mV / G
• Temps de resposta: 3mks
• Linealitat (% del rang) 0,7%
• Distància de temperatura de funcionament de -40 ° C a 100 ° C
El sensor és compacte, ~ 4x3x2 mm. Mesura el component del camp magnètic perpendicular a la seva superfície frontal. El sensor és bipolar i té 3 pins - Vcc Gnd Out
Pas segon: panell
Primer, l’assistent munta el circuit en un panell. Connecta el sensor, la pantalla i el botó Hall: el sensor Hall s’ha de connectar a + 5V, GND, A1 (d’esquerra a dreta). La pantalla s’ha de connectar a GND, + 5V, A5, A4 (d’esquerra a dreta). Quan premeu el botó, cal establir una connexió a terra a A0.
El codi es va escriure i descarregar mitjançant la versió 1.8.10 d'Arduino IDE. Cal la instal·lació de les biblioteques Adafruit_SSD1306 i Adafruit_GFX.
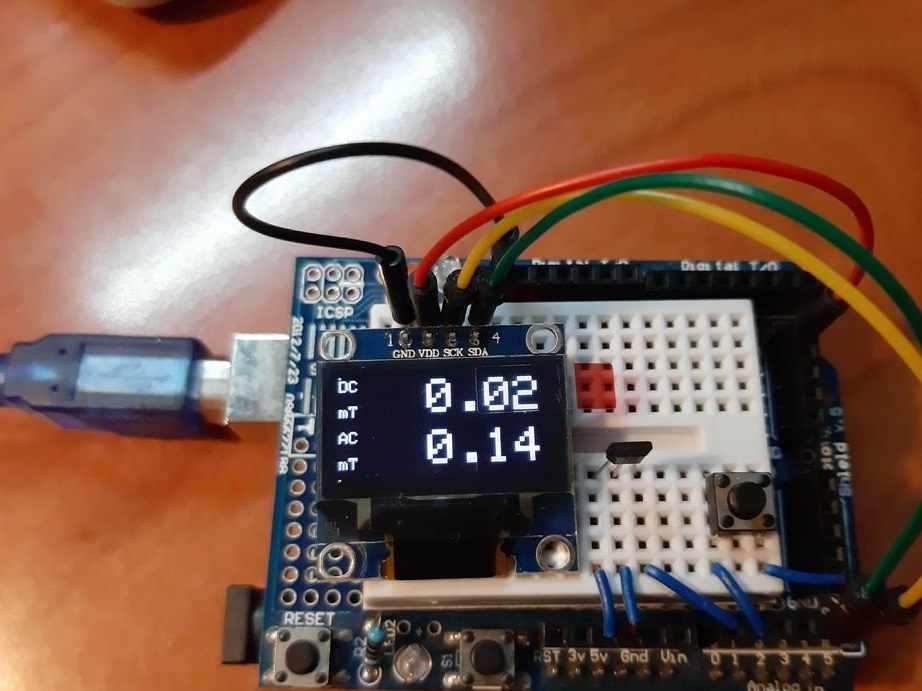
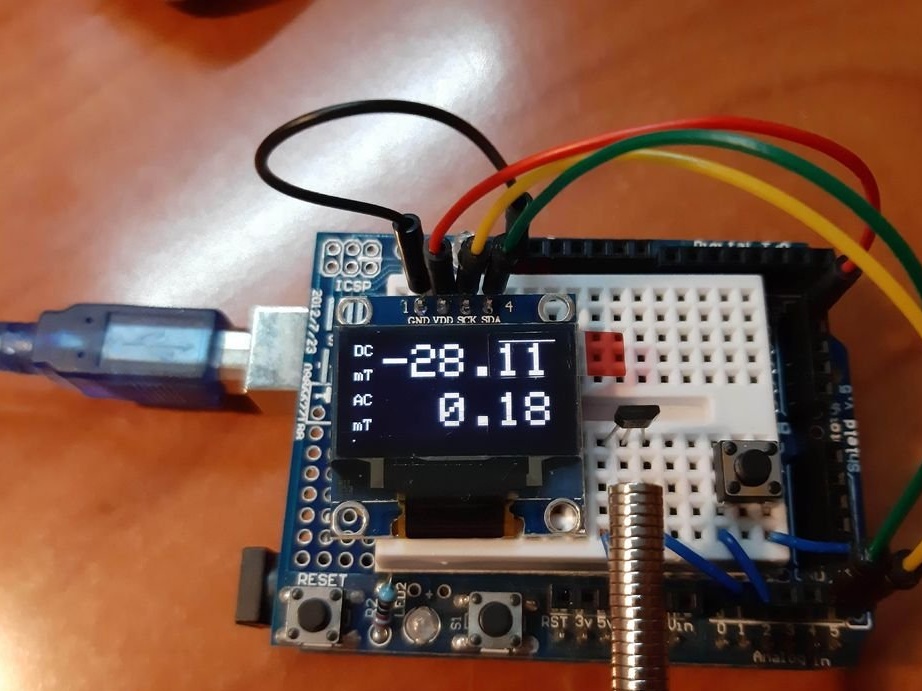
La pantalla ha de mostrar el valor de corrent directe i el valor de corrent altern.
El codi es pot descarregar a continuació.
Magnetòmetre.ino
Tercer pas: Sensor
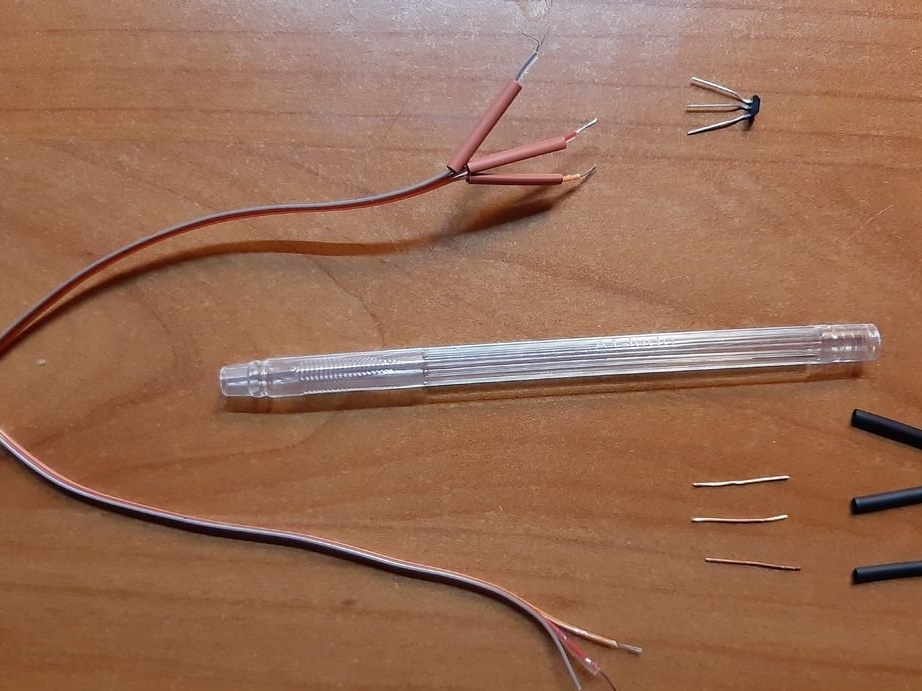
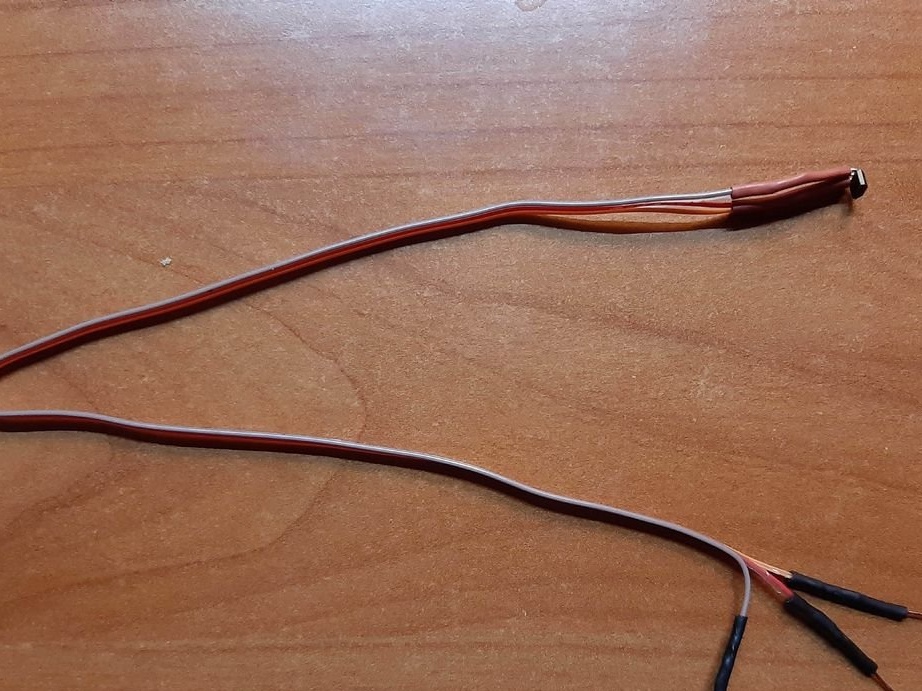
El sensor Hall s’instal·la millor al final d’un tub estret. Aquesta disposició és molt convenient i es pot col·locar fàcilment dins de forats estrets. Qualsevol tub buit fet de material no magnètic ho farà. El mestre utilitzava un bolígraf antic.
Cal preparar tres fils flexibles prims que siguin més llargs que el tub. Va soldar els cables a les potes del sensor, aïllats.
Pas quart: Construir
La bateria de 9 V, pantalla OLED i Arduino Nano s’ajusten còmodament en una caixa Tic-Tac. L’avantatge és que és transparent, de manera que els valors de la pantalla es llegeixen bé al seu interior. Tots els components fixos (sensor, interruptor i botó) s’uneixen a la part superior de manera que es pugui treure tota la unitat de la caixa per substituir la bateria o actualitzar el codi.
El mestre no era un fan de bateries de 9 V, són cares i tenen una capacitat petita. Però el supermercat local va vendre de sobte una versió recarregable de NiMH per 1 euro cadascun. Es poden recarregar fàcilment si es subministren amb potència d’11 V a través d’una resistència de 100 ohms durant la nit. Per connectar la bateria, el mestre utilitza els contactes de la bateria antiga de 9 V. La bateria de 9 V és compacta. Des de bateria + servit a Vin Arduino, menys a GND. Una sortida de +5 V tindrà un voltatge regulable de 5 V per a la pantalla i per al sensor Hall.
La sonda Hall, la pantalla OLED i el botó estan connectats de la mateixa manera que a la placa base. L’única incorporació és que el botó d’encesa / apagada s’instal·la entre la bateria de 9 V i l’Arduino.

Cinquè pas: calibració
La constant de calibració del codi correspon al número indicat a la descripció tècnica (1,4 mV / gauss), però la descripció tècnica permet un ampli rang (1,0-1,75 mV / gauss). Per obtenir resultats precisos, hem de calibrar la sonda.
La manera més fàcil de crear un camp magnètic amb una força definida amb precisió és utilitzar un solenoide.
Per al càlcul, es pren la fórmula següent: B = mu0 * n * I. La constant magnètica és constant mu0 = 1.2566x10 ^ -6 T / M / A. El camp és uniforme i depèn només de la densitat de les bobines n i del corrent I, que es pot mesurar amb un bé precisió (~ 1%). La fórmula anterior en aquest cas funciona si la relació de longitud a diàmetre L / D> 10.
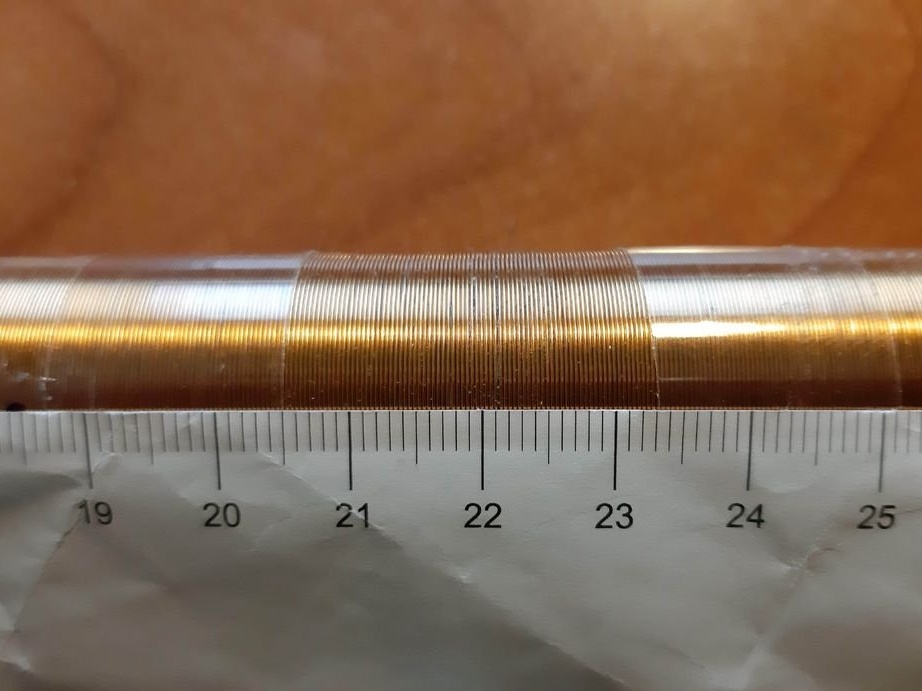
Per fer un solenoide adequat, heu d’agafar una canonada cilíndrica buida amb L / D> 10 i enrotllar l’enrotllament. El mestre va utilitzar un tub de PVC amb un diàmetre exterior de 23 mm. El nombre de voltes és de 566. La resistència és de 10 ohms.
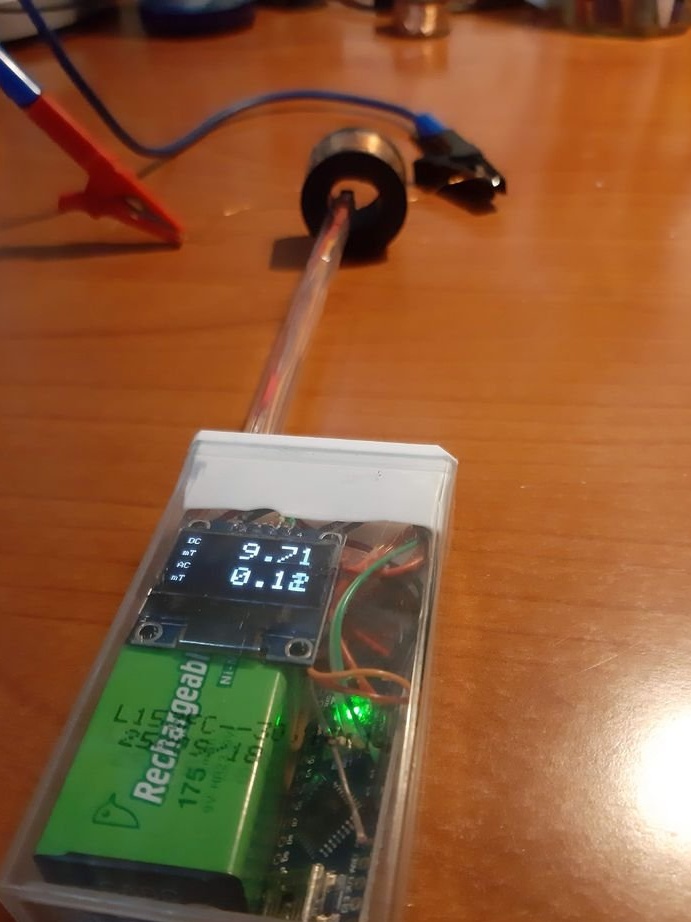
A continuació, subministra energia a la bobina i mesura el corrent amb un multímetre. Per controlar el corrent, s’utilitza una font de tensió CA o una resistència de càrrega variable. Mesura el camp magnètic per a diversos paràmetres actuals i el compara amb les lectures.
Abans de la calibració, el sensor mostrava 6,04 mT, mentre que en teoria era 3,50 mT. Per tant, el mestre va multiplicar per 0,58 la constant de calibració de la línia 18 del codi. Ara el magnetòmetre està calibrat.