

Quan la part superior gira, la seva energia cinètica es converteix gradualment en calor i aviat s’atura. Casolans, proposat per l’autor d’Instructables amb el sobrenom de HowToEngineer, compensa les pèrdues de fricció degudes al subministrament d’energia des de l’exterior. La tapa de gir girarà contínuament fins que molesti el propi usuari i apagueu el dispositiu.
El principi de funcionament del dispositiu es basa en la interacció dels imants:
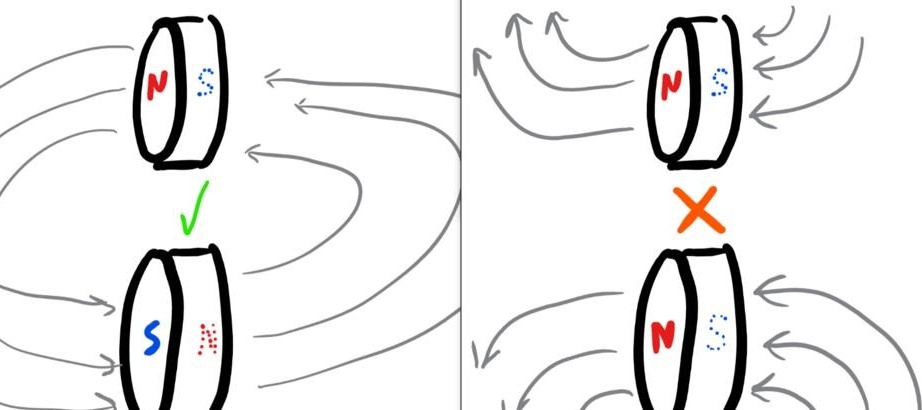
A l'exterior: un imant paret a la part superior, a l'interior, un imant d'un disc impulsat per girar per un motor elèctric. Els lectors que van suggerir que s'utilitzen diversos electroimants en el disseny, alternats alternativament Arduinoquedarà decebut. O a l’inrevés, estan encantats si consideren que això és sobreenginyeria. El regulador de la velocitat de rotació del motor elèctric és una resistència de filferro.
A continuació, es detallen alguns detalls del dispositiu: un interruptor, un filferro (obligatori) de resistència variable (les indicacions de 25 a 100 Ohms són adequades), un motor elèctric, un fil prim cordat, just a sota de tot, hi ha dos imants i al voltant d'un ... No us sorprengui, és molt convenient fer la part superior de la part superior. Si us mossegueu un tros molt petit de filferro d'acer, podeu fins i tot fer-lo servir per al propòsit previst.

Per descomptat, sense eines no es pot. I si teniu una impressora 3D i una resina epoxi de dos components, hi ha feina.

Després d’haver desenvolupat totes les parts impreses en 3D, l’assistent penja dos arxius, un dels quals conté tots els fitxers en format FreeCADsegon - tots els fitxers STL. Després recopila la part elèctrica del dispositiu:

Lliga un porta-imant a l’eix del motor, al qual es munta l’imant, i s’enganxa amb epoxi. Mentre s’asseca, no hi hauria d’haver objectes propers que puguin atreure l’imant, tirant-lo d’aquesta de l’adaptador. No s'ha de permetre que la resina entri al rodament del motor: no podrà girar. Cal seleccionar la polaritat de manera que, quan es veu des de dalt, el motor giri en el sentit de les agulles del rellotge. Si ets esquerrà - en sentit antihorari.
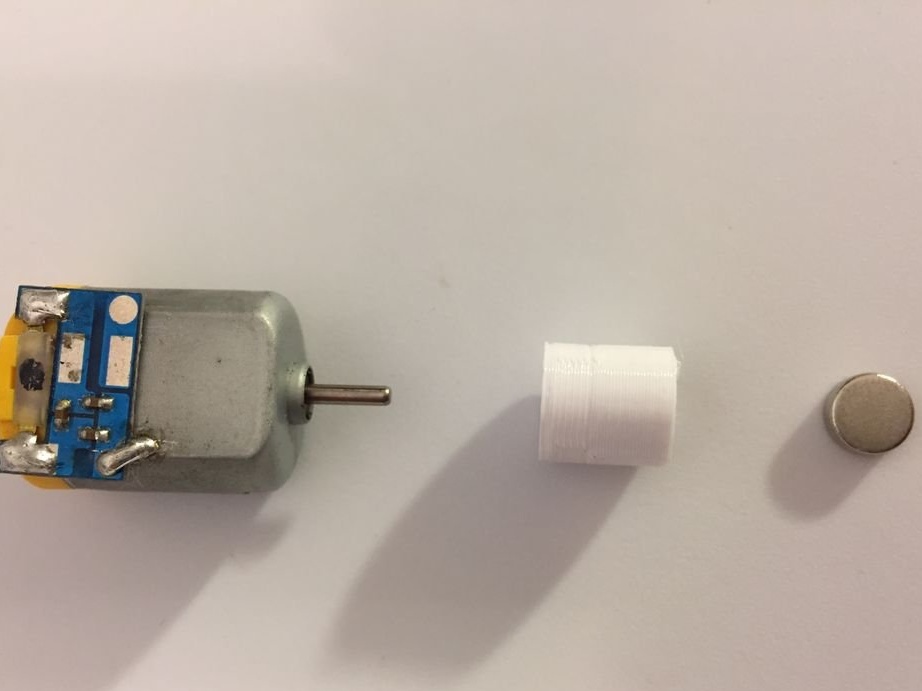
Instal·la tot el cas, la següent foto mostra com es troba exactament l’imant a l’adaptador. També queda clar què cal fer amb un muntatge del motor i un adaptador si no hi ha una impressora 3D. El mànec del resistor variable es pot agafar en qualsevol cas, adequat o fet a casa.

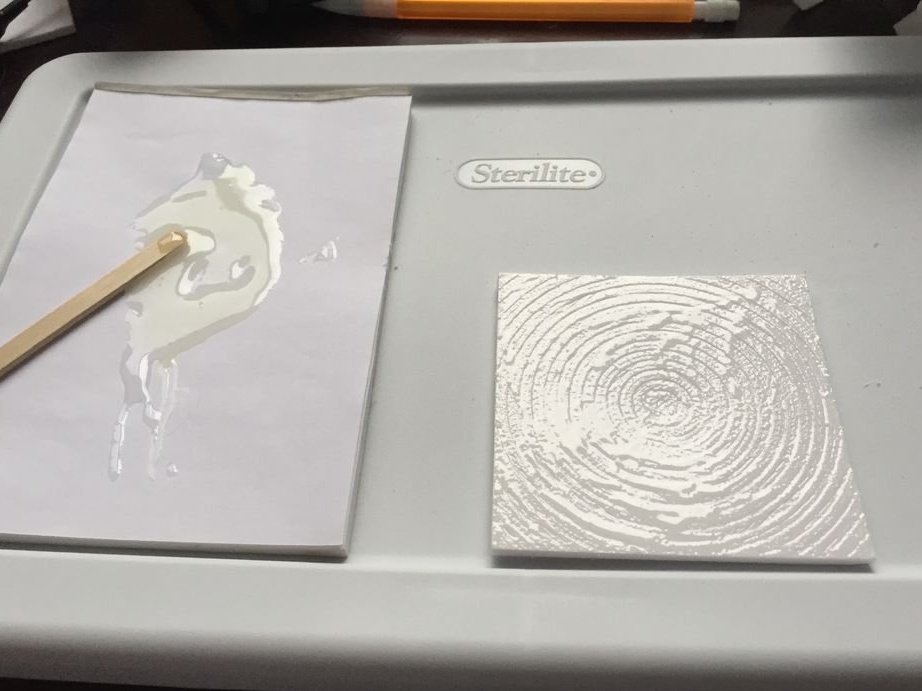
No és adequada la superfície sobre la qual girarà la filatura immediatament després de la impressió 3D. El mestre el poleix, aplica una capa d’epoxi, l’endureix, el poleix de nou i aplica una segona capa. Després d’endurir-se, s’obté una superfície llisa.
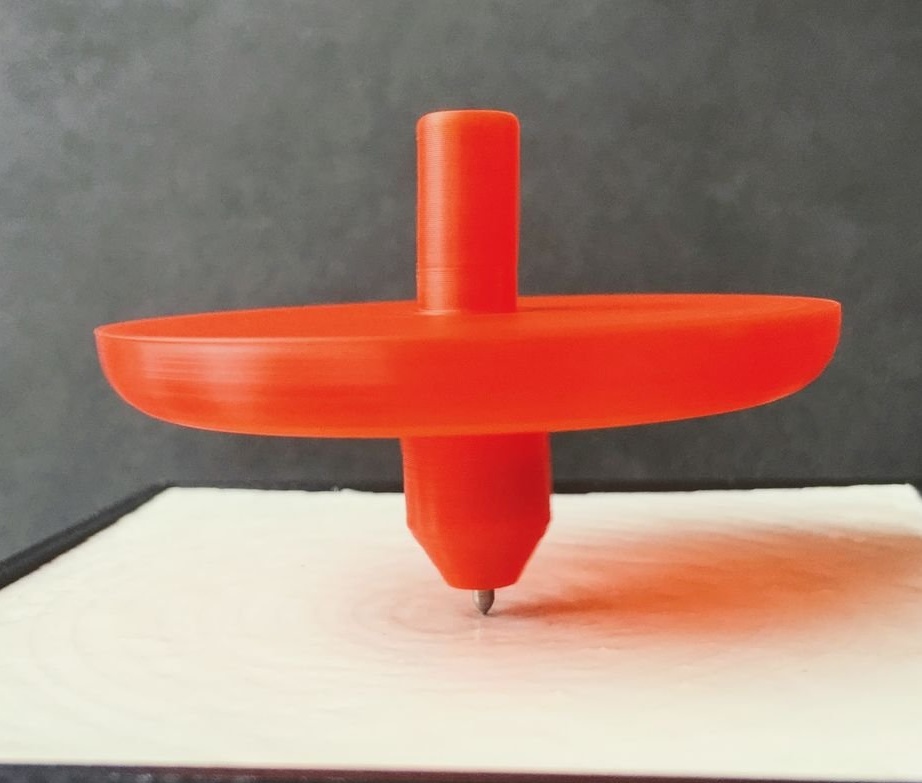
La part finalitzada tanca la caixa i el dispositiu està a punt:

A les tapes impreses en 3D (també es poden fer d’una altra manera) instal·la imants, els cobreix amb cilindres i segells:
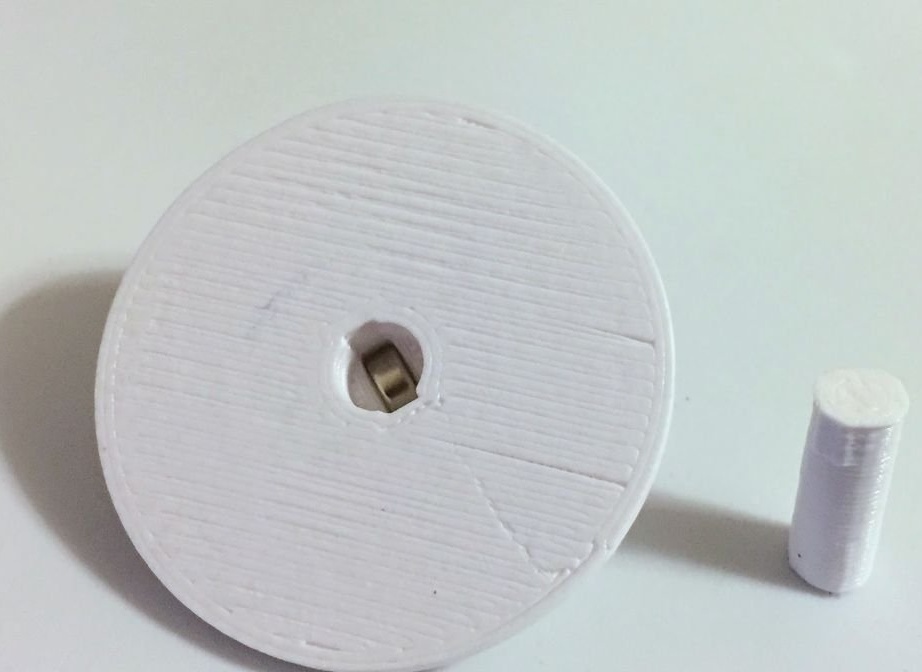
Un dels dos cims ja té una punta de plàstic. Podeu utilitzar-lo de seguida, però ràpidament s’enfosquirà: l’heu de triturar. Per a la segona part superior, el mestre retalla un petit tros de filferro d'acer del penjador:

Ho afila, perfora un forat a la part superior, enganxa allà la punta resultant:
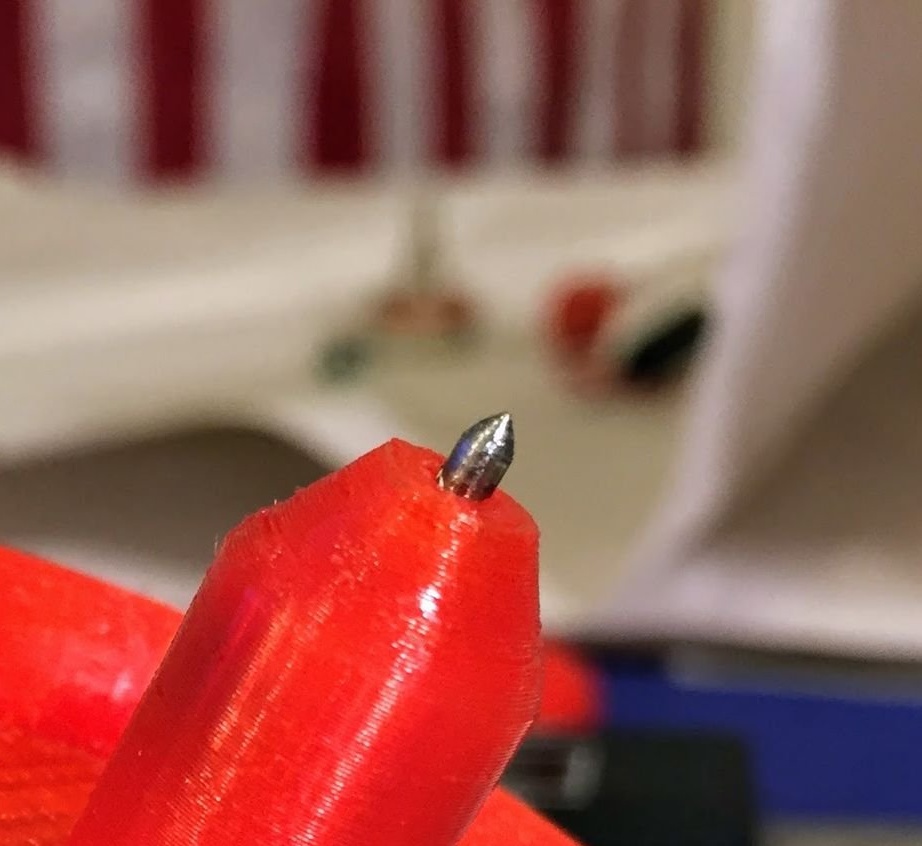
Les dues capçals de filatura estan a punt:

Si la superfície de gir de la part superior no està feta per impressió 3D, sinó de qualsevol altra manera i resulta immediatament llisa, ha de ser polida i revestida amb epoxi tal com es descriu més amunt. En cas contrari, es desgastarà ràpidament per l'impacte d'una punta metàl·lica. En qualsevol cas, cal preveure la possibilitat de punxar aquesta part i treure-la per accedir al compartiment de la bateria.
El mestre retorça al mínim la resistència variable, estableix la part superior a la superfície, desenrotlla la part superior, encén la potència, fa girar suaument la resistència variable fins que la fricció dels coixinets es superi: el motor comença a girar. Augmenta una mica més les revolucions i disminueix fins que la velocitat del motor coincideixi amb la velocitat de gir de la part superior. Si es sincronitza amb el motor, es notarà un fort canvi de so. Ara podeu augmentar la velocitat al desitjat. La part superior de gir girarà fins que el dispositiu s’apagui o fins que es descarreguen les bateries / acumuladors, es desgastin els raspalls, els coixinets del motor i la primera part superior també tingui una punta. Totes les falles són fàcils de corregir i tot tornarà a funcionar. També podeu proporcionar una entrada per a una PSU de 5 V i un estabilitzador d’impulsos per convertir aquesta tensió a 3,3 V i també utilitzar un controlador PWM en lloc d’un resistor de fil variable.