El mestre s’ha interessat des de fa temps en models d’avions. Primer va ser un model d’avions, després quadrocòpters. En aquest article, l’assistent us indicarà quins materials és millor triar per a un quadrocòpter, així com com fer un marc a partir de contraplacat. Mirem un breu vídeo demostratiu.
Per fer un quadrocopter, el mestre va utilitzar el següent
Eines i materials:
-Placat de bosc;
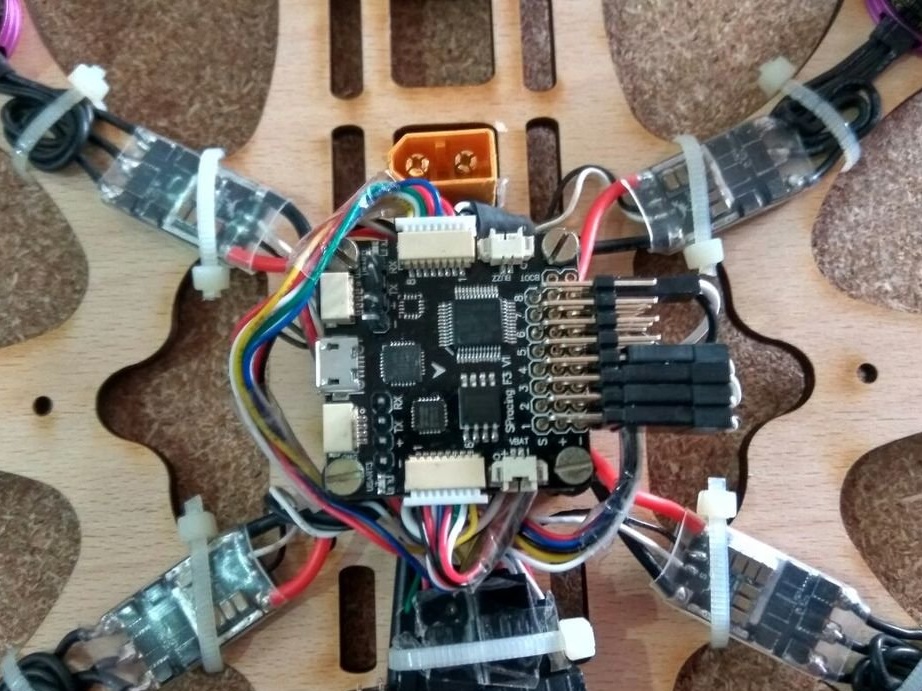
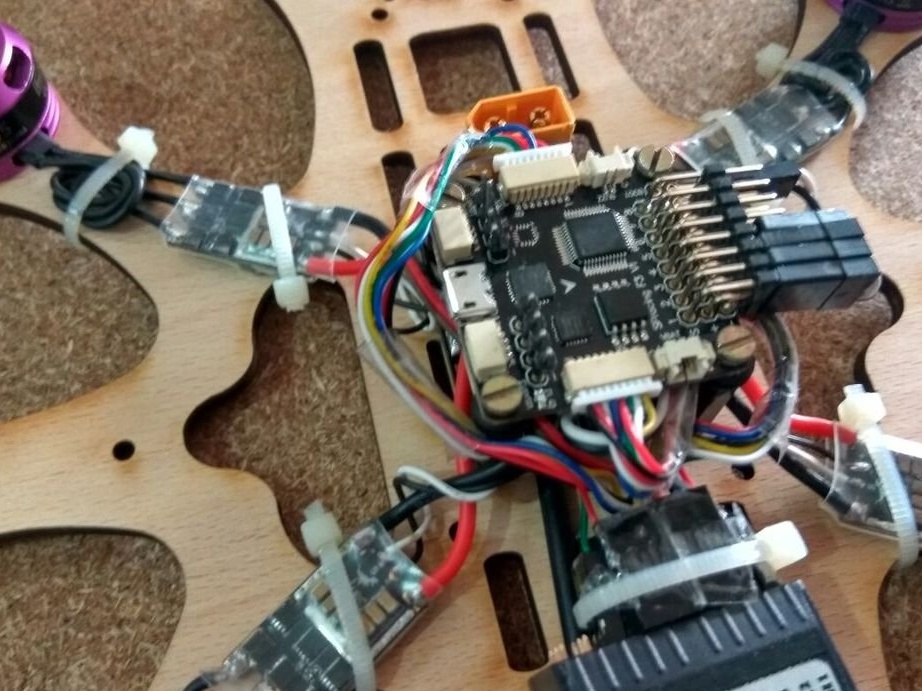
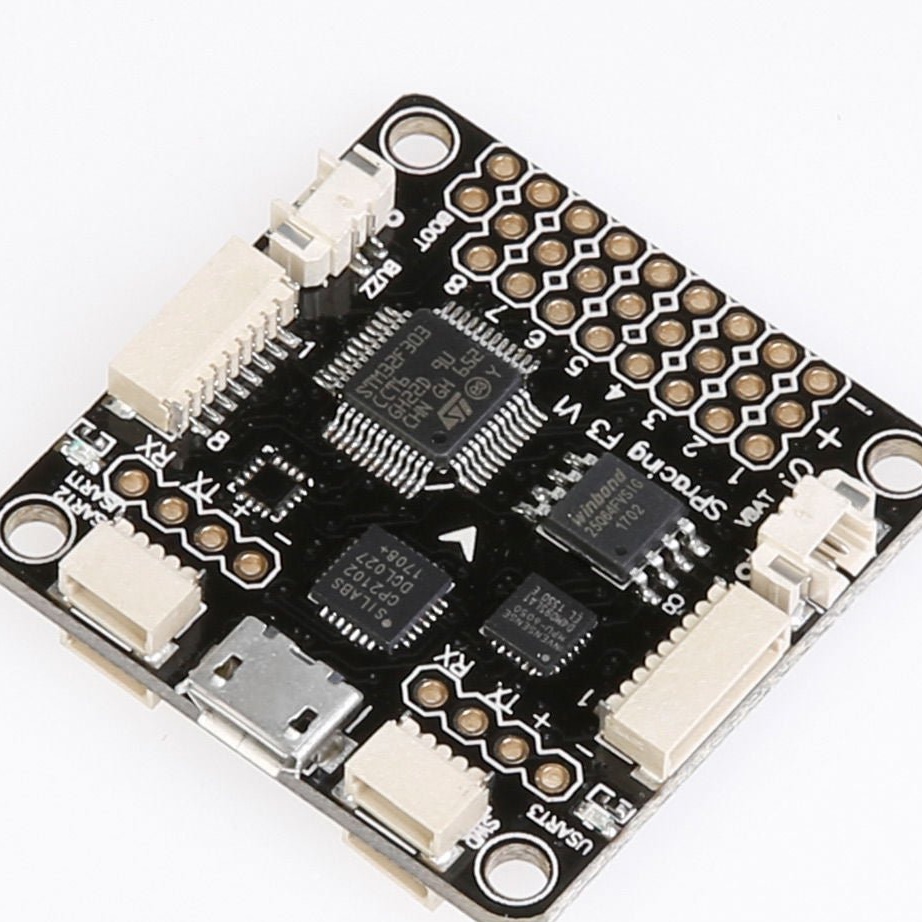
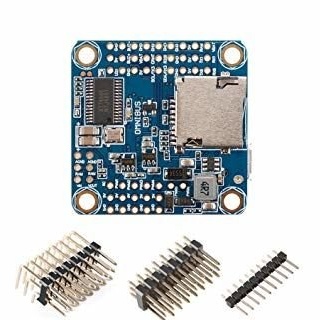
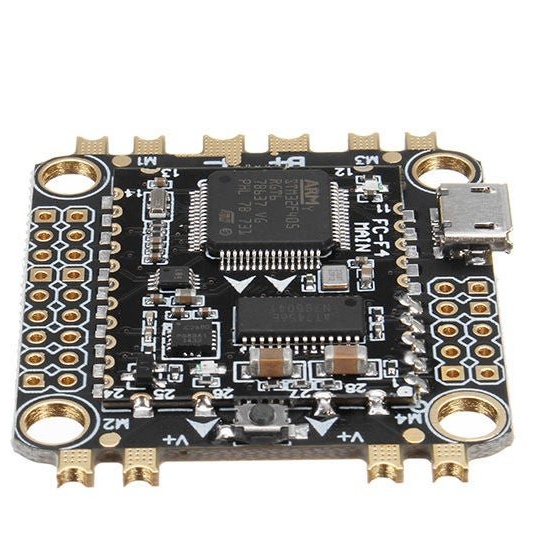
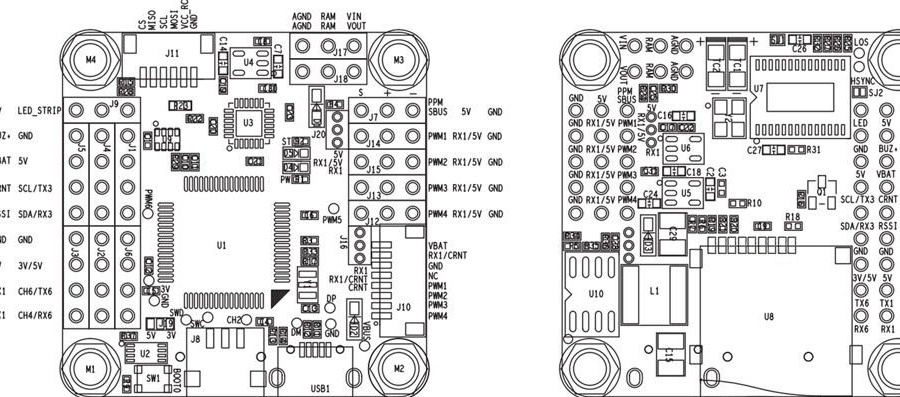
-Controlador Omnibus F4, SP Racing F3;
-Taula de distribució d’energia;
- Controlador HGLRC 28A BLHeli ESC - 4 unitats;
- Motor Racestar BR2204 2600Kv Racing Edition -4 unitats;
- hélices KingKong 5X4X3 - 4 unitats;
- Mòdul de ràdio THS X de flsky amb receptor;
Gens de la bateria 3800 mAh;
-Racks; - 16 unitats;
-Screw M3;
- tornavís;
-Accessoris de venda;
-Noix;
- tallador CNC;
Primer pas: Selecció de materials
Marc.
Normalment el bastidor està format per components lleugers i rígids, com fibra de vidre, fibra de carboni, fusta, alumini, etc. Hi ha molts tipus de bastidors diferents, el mestre fabricarà un marc per a quatre motors.
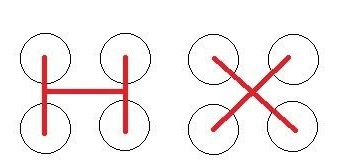
Aquests marcs es troben principalment en forma H o en forma X. La forma X és un bon equilibri entre estabilitat i maniobrabilitat. És aquest marc el que farà el mestre.

Controlador
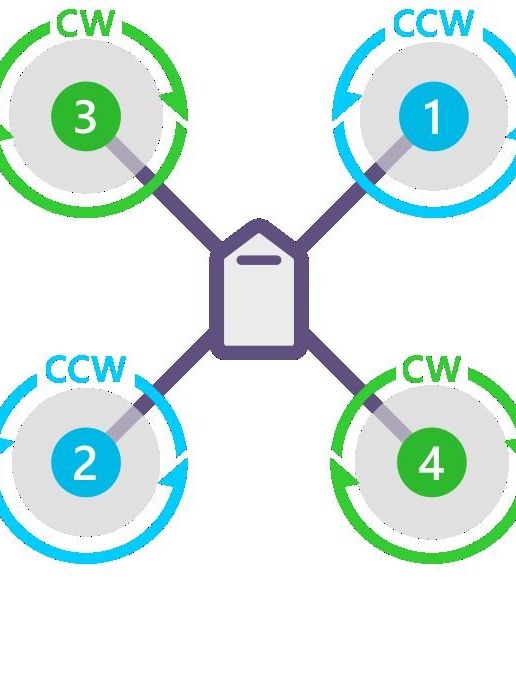
El controlador controla el funcionament dels motors. El diagrama mostra que tots els motors giren en direccions oposades per neutralitzar el parell generat per cada motor. El controlador és el cervell d’un quadrocopter, bàsicament és un petit ordinador que utilitza els seus sensors per mesurar l’angle i la velocitat constantment.
Els controladors de vol es classifiquen principalment segons les especificacions del processador.

Motors
Hi ha dos tipus de motors, motors sense escombretes i motors sense escombretes. La majoria dels quadrocòpters utilitzen motors sense escombretes que poden respondre molt ràpidament als canvis en la velocitat i els requeriments de parell. Per a motors sense escombretes, especial electrònica controlador de velocitat (ESC).
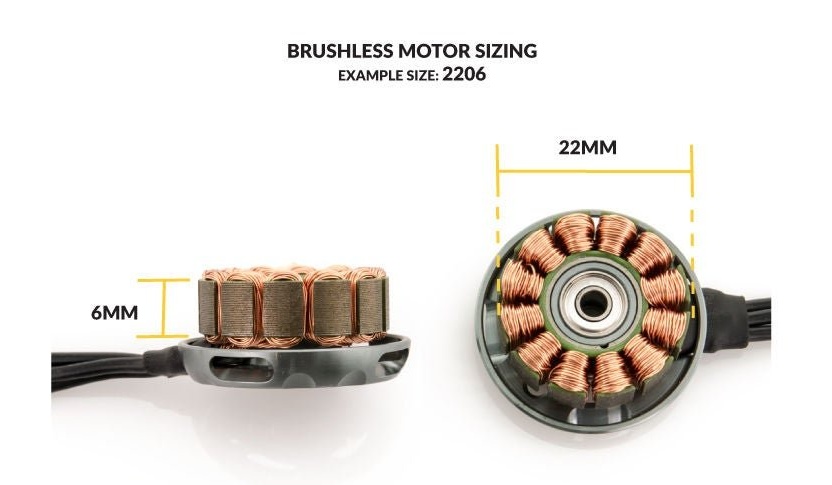
La mida dels motors sense escombretes està indicada per un número de quatre dígits - AABB. "AA" és l'amplada de l'estator i "BB" és l'alçada de l'estator o el diàmetre de l'estator, ambdós en mm (mil·límetres). Per exemple, el Racestar BR2205 té un estator amb un diàmetre d’uns 22 mm i una alçada d’uns 05 mm.
De fet, com més gran sigui l'estator, més gran és la potència a velocitats més elevades i més ampli estatorista, major serà el parell a velocitats més baixes.
El valor KV del motor indica la velocitat a la qual girarà el motor quan apliqueu 1 volt als seus bobinats.Es determina pel nombre de bobinatges del fil de coure a l'estator del motor i la força magnètica dels imants.
Menys enrotllaments significa menys resistència i, per tant, rpm més alts. És per això que els motors amb KV més elevat solen tenir menys enrotllament de l'estator.
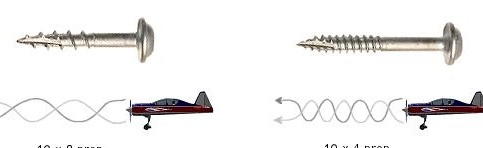
KV determina quin cargol podeu utilitzar amb el motor. Com més baix sigui el KV, més gran és el cargol que pot girar i viceversa. No és possible augmentar la força d’elevació mitjançant la instal·lació d’un cargol més gran en un motor amb un KV superior, ja que els requeriments de parell superaran la potència admesa i el motor s’escalfarà.
Per exemple: els motors BR2205 de 2600 kV poden funcionar amb cargols de 5x4 polzades, i els motors BR2212 de 1000 kV poden funcionar amb cargols de 10x4.5 polzades
El KV no és en cap cas un indicador de la potència de motor; els motors amb un KV superior no són necessàriament més potents que els motors amb un KV inferior.


Controladors electrònics de velocitat (ESC).
Els avenços recents en els mini quadrocopters han estat possibles amb l’arribada de petits controladors electrònics de velocitat que permeten el funcionament de motors sense escombretes. El funcionament dels reguladors electrònics de velocitat consisteix a rebre el senyal d’acceleració del controlador de vol i mantenir la rotació del motor a la velocitat requerida.
Diverses tecnologies funcionen dins d'aquests petits dispositius que estan fora de l'abast d'aquest manual. En comprar, tria un ESC amb un corrent directe nominal d'almenys un 20% més que el calculat.


Hèlice.
Les hèlixs converteixen l’energia mecànica dels motors en tracció. La mida i la forma de l'hèlix tenen un paper important en l'eficiència del vol.
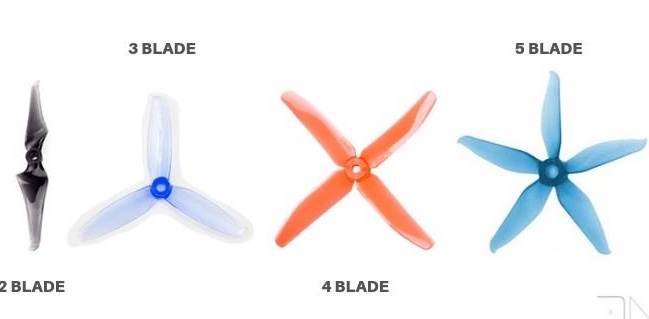
Hi ha 2 tipus de formats que utilitzen els fabricants: L x P x B | LLPP x B. On, L és la longitud, P és el to, B és el nombre de pales.
Les hèlixs es poden fer de diversos materials, com ara composites plàstics, fibra de carboni, fusta, etc. Cada tipus de material té característiques úniques, per exemple, fibra de carboni i fusta són realment rígides i conegudes pel bon funcionament, i alguns plàstics són molt duradors. La majoria dels cargols utilitzats en els mini quadrocopters són de compostos plàstics.
La mida de l'hèlix que podeu utilitzar està limitada per la mida del vostre marc, així com per la potència HF del vostre motor. Per regla general, com més hèlix podeu utilitzar per crear una certa empenta, més eficaç serà. Per als mini quadrocòpters, varien entre els cargols de 5-6 polzades en increments de 4-5 polzades.
El nombre de fulles afecta la tracció i el consum d'energia. Com més fulles, més tracció i més energia es gasta.


Bateries
Actualment, la majoria de vehicles aeris no tripulats utilitzen bateries de polímer de liti, conegudes comunament com a bateries Lipo. La bateria junt amb l’ESC i el motor és un sistema d’alimentació en quadrocòpter.
No penseu que la bateria sigui un dipòsit d’energia, els motors poden treure una quantitat monstruosa d’amperes en intervals molt curts. Les bateries LiPo són un conjunt de cel·les, cadascuna de les quals té un voltatge nominal de 3,7 V. Si es requereix un voltatge superior, aquestes cel·les es poden connectar en sèrie per formar una bateria. Les bateries connectades en sèrie estan marcades amb la lletra “S” i en paral·lel amb la lletra “P”.
Com més cèl·lules estiguin connectades en sèrie, més tensió i més cèl·lules en paral·lel, més gran serà la capacitança.
Per exemple:
1S = 1 cel·la = 3,7 V
2S = 2 cel·les = 7,4 V
3S = 3 cel·les = 11,1 V
4S = 4 cel·les = 14,8 V
5S = 5 cel·les = 18,5 V
6S = 6 cel·les = 22,2 V
La capacitat està indicada en mil·límetres o "mAh". És el nombre d’amperis que pot emetre una bateria en una hora. Per exemple, una bateria 3S 2000 mAh pot proporcionar 2 A durant 1 hora. de manera que si el seu quadcopter tira 20A, el seu vol continuarà durant 2/20 * 60min = 6 minuts.
La descàrrega nominal indica la velocitat màxima a la qual es pot treure el corrent de la bateria. S'indica amb el número "C" a la part superior. Com més gran sigui la qualificació C, major serà la quantitat de corrent que pot donar la bateria.
Per exemple, una bateria de 2000 mAh 25C pot proporcionar fins a 2000x25 = 50.000 mA o 50 A.



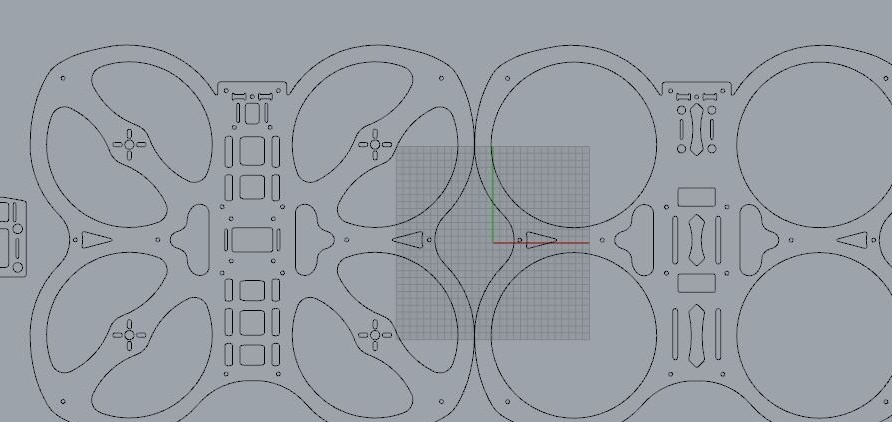
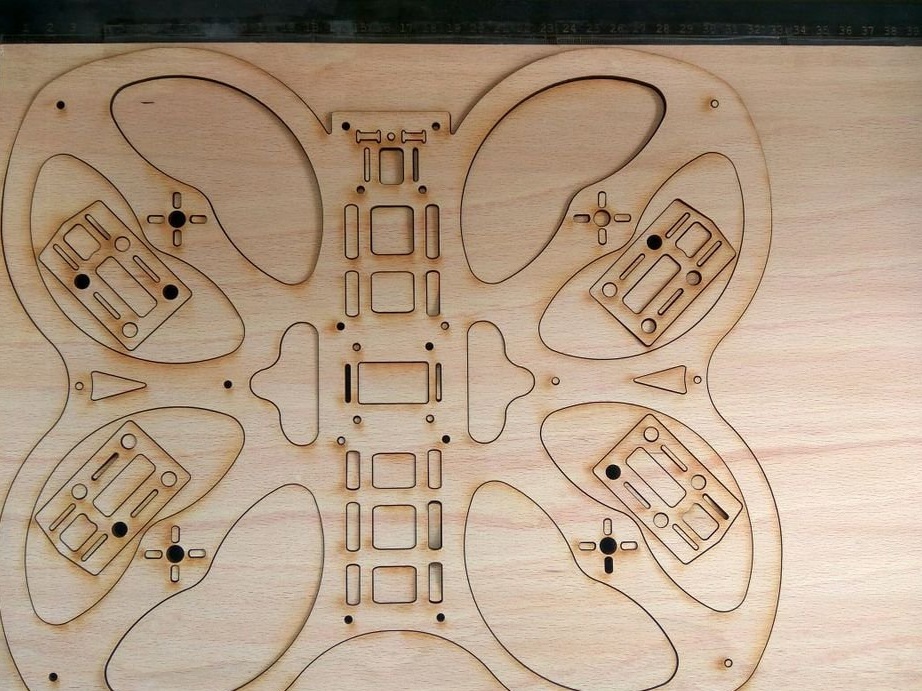
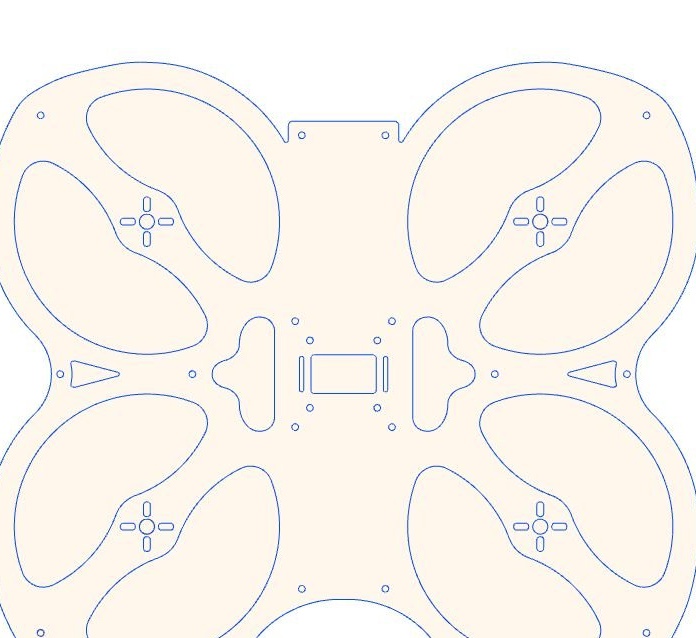
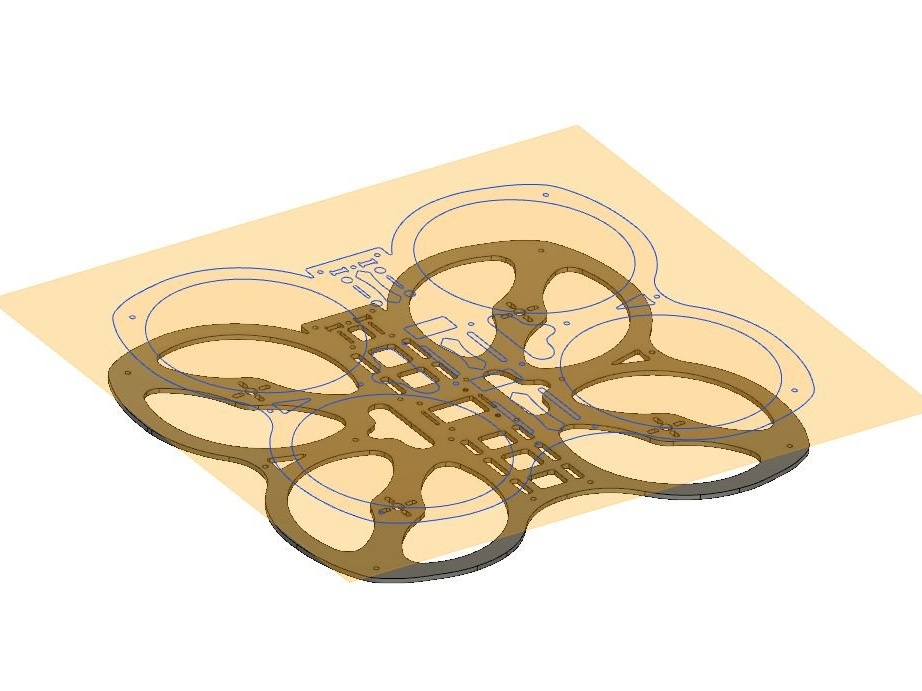
Pas segon: disseny i muntatge del marc
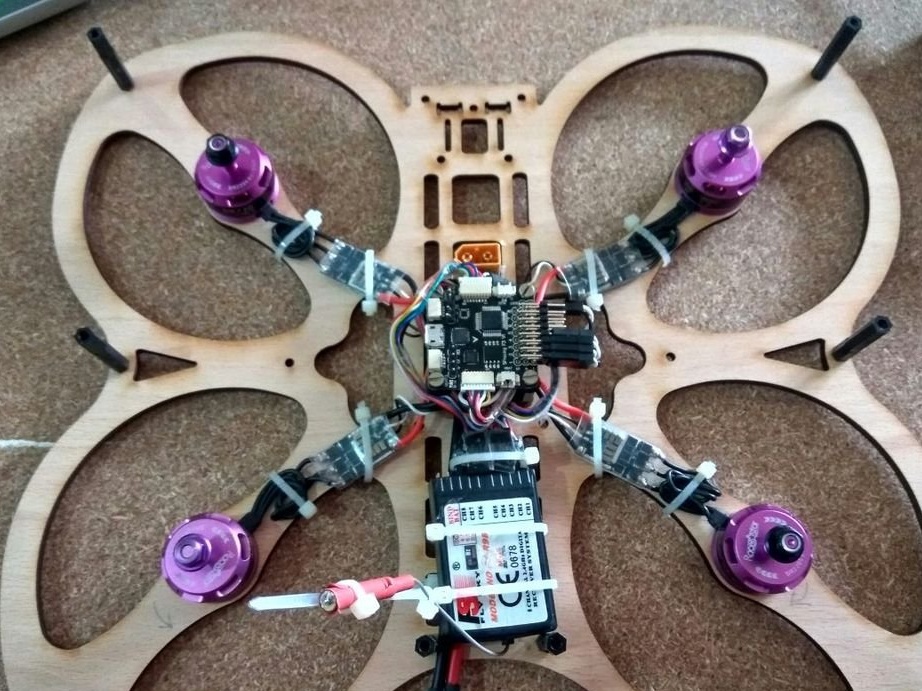
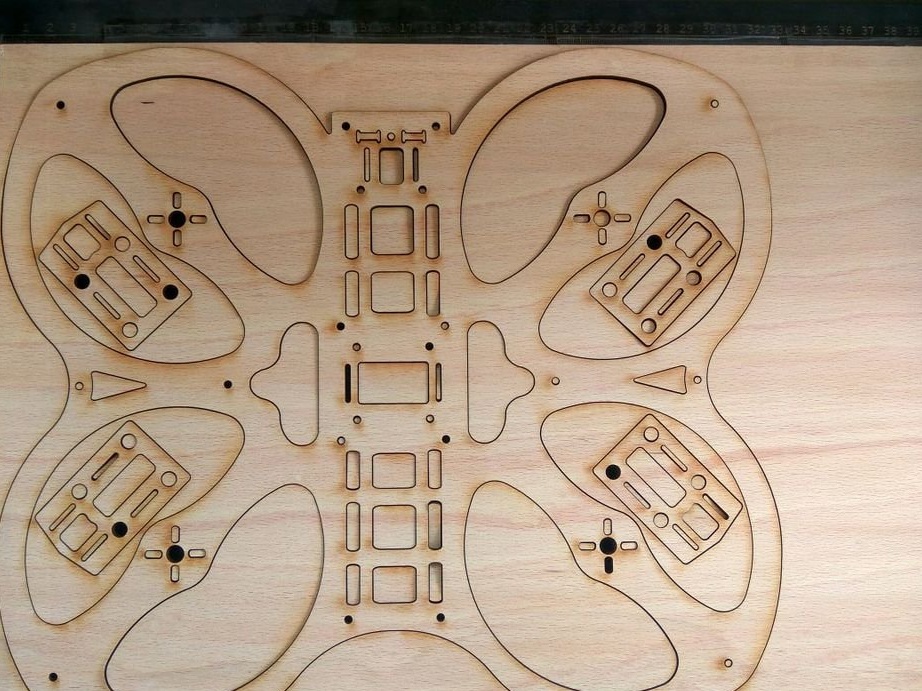
El disseny del marc es va inspirar en la forma de la papallona monarca.Quan mires el marc des de dalt, sembla dues ales.
L’assistent va dibuixar el disseny en Fusion 360 i Rhino CAD. La mida del marc és d’uns 230 mm, és a causa de la distància en diagonal d’un nucli del motor a un altre. Les mides dels bastidors més populars són 210 mm, 250 mm, etc. Un cop establerta la mida del bastidor, dibuixeu les muntures del motor.
L’edifici central és el lloc on s’instal·larà tota l’electrònica, inclòs el controlador de vol, el receptor, la bateria, etc. Al punt mig hi ha 4 forats M3 a una distància de 30,5 mm els uns dels altres.
L'element s'elabora mitjançant tall de làser. Si no teniu cap tallador, podeu tallar-lo al taller. El fitxer per tallar es pot descarregar a continuació.
Disseny de fitxers.rar









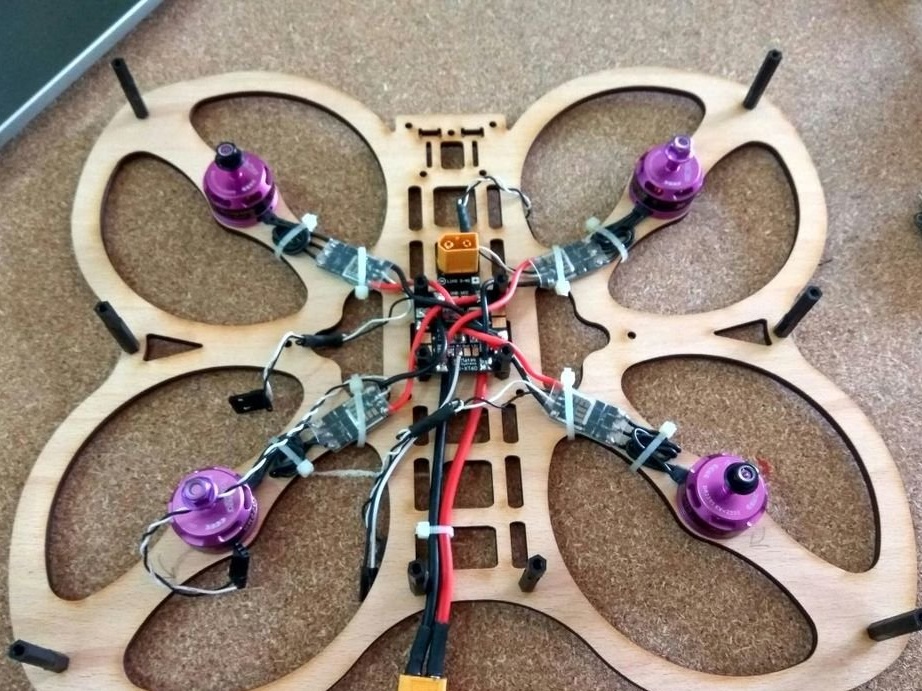
Tercer pas: crear
Ara cal muntar un quadrocòpter.
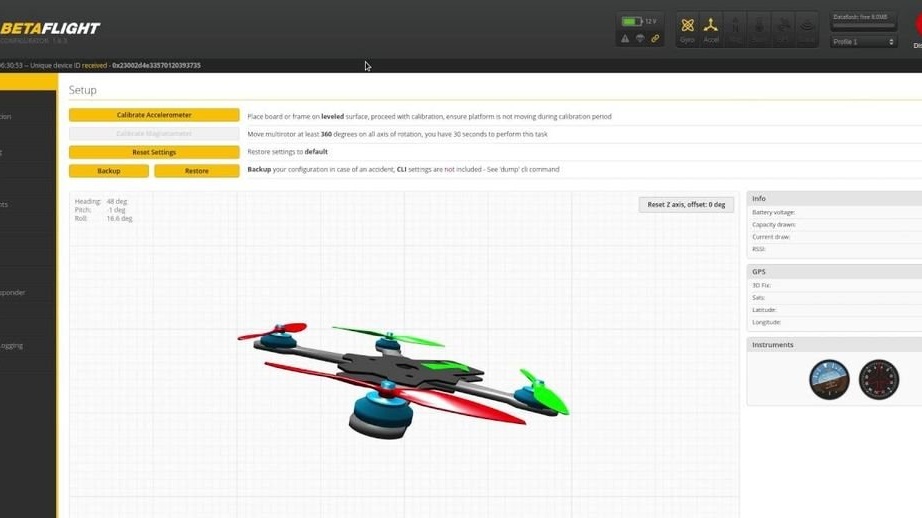
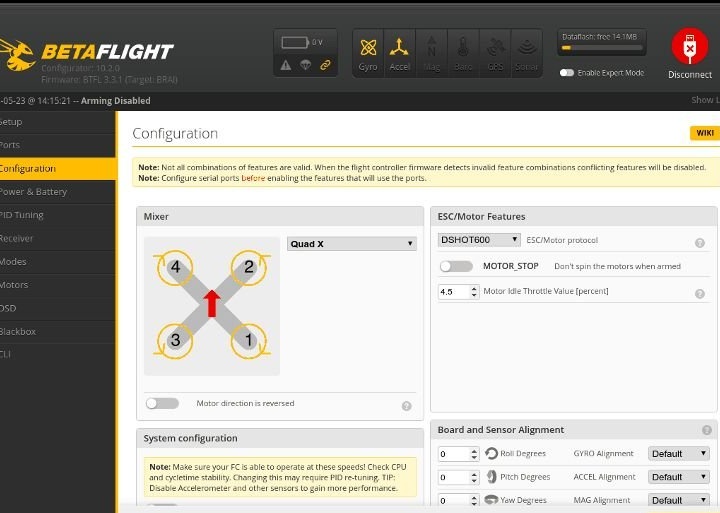
Primer necessiteu fer servir el controlador amb el firmware Betaflight. A continuació, calibre el sensor. Connecteu el mòdul de ràdio i comproveu el seu funcionament. Munteu els motors al bastidor segons el diagrama del fotograma X amb el sentit de gir correcte. En soldar el motor es condueix als terminals ESC i fixar l’ESC al suport. Adjunteu la placa de distribució d'energia i soldeu els coixins ESC Connecteu el Soler XT60 al cable d’alimentació i, a continuació, a la placa de distribució d’energia. Fixeu el controlador. Connecteu els cables de l'ESC al controlador de vol. Muntar el receptor al bastidor. Poseu la coberta superior.