
Bon dia a tots els vostres estimats amics! A l’article d’avui, m’agradaria mostrar-vos una idea força interessant casolans, que ho pot fer gairebé qualsevol que ho hagi fet almenys una mica treballs d’agulla i qui sap una mica d’Arduino.
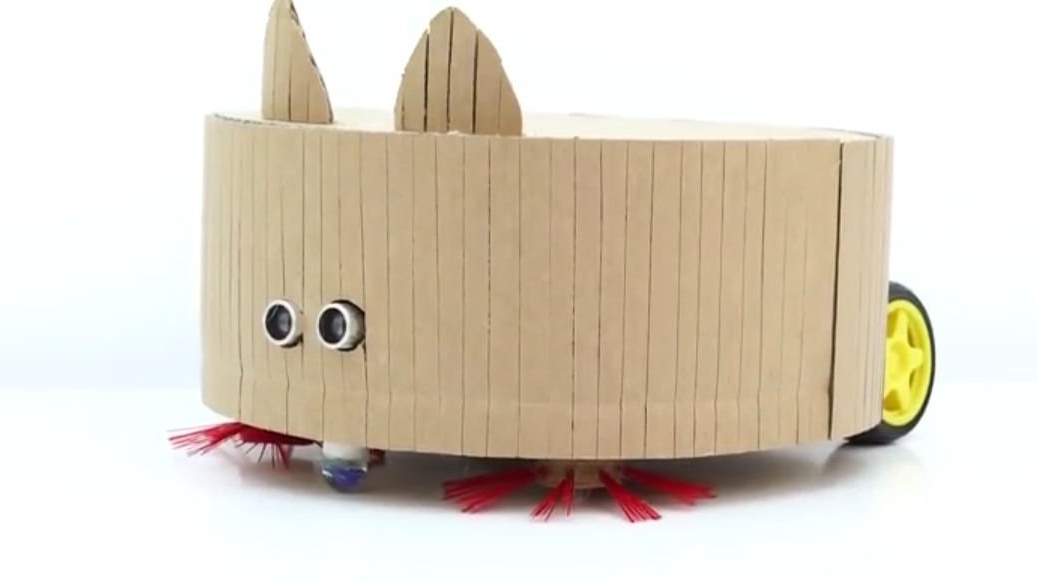
En general, avui farem de senzilles robots aspirador de cartró fes-ho tu mateix. Però ja m’ho dius, perquè ja t’he dit com fer un robot netejador a tu mateix i tindràs raó, però aquest aspirador robot és molt més senzill, barat i més convenient que l’anterior. Sí, i això el model modificat i té un aspecte millor, i també té automatització completa a bord. Això artesania, no només ajudarà a passar el temps, sinó que també es convertirà en un ajudant indispensable a la vostra llar o taller. En definitiva, la cosa és útil i no és complicada.
Doncs bé, prou amb el llarg prefaci, anem!
Per tant, per a aquest producte casolà necessitem:
cartró ondulat (molt cartró)
-
cables de connexió
-
-
-Wheels per a motors d’engranatges
-driver de controladors per a Arduino (l’autor del producte casolà utilitza un controlador model, que només cal introduir a l’ardu per connectar-se, però podeu utilitzar un controlador que us sigui convenient, el principal és que la tensió coincideixi amb els motors d’engranatges)
-
-Capsells d’ampolla de plàstic
- truges d’una escombra
-motor amb ventilador de turbina, en principi, pots fer-ho tu mateix
malla de plàstic
- petit contenidor
caixa per a dues bateries de 18650
-
De les eines també necessitarem:
soldadura
pistola de cola
ganivet d'oficina
línia
- llapis o retoladors
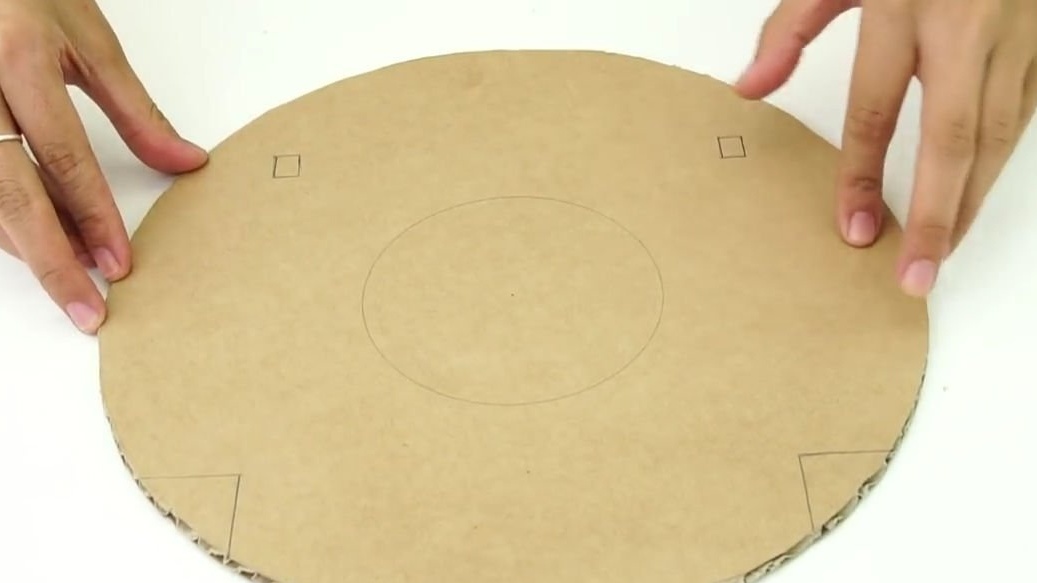
El primer pas és agafar un gran full de cartró, un regle i una brúixola. Mesurem 13 cm amb una brúixola i dibuixem un cercle sobre cartró.


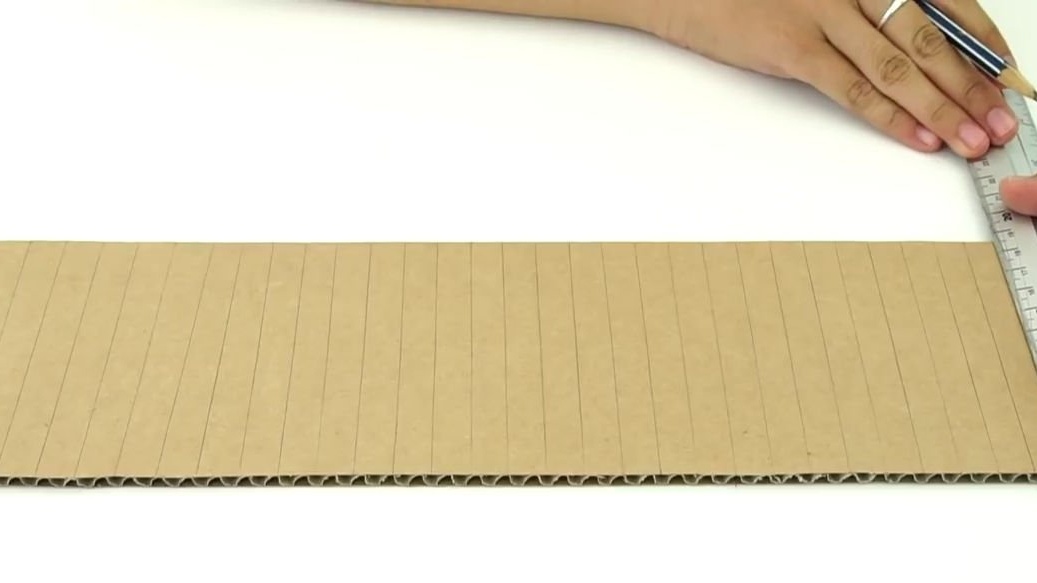
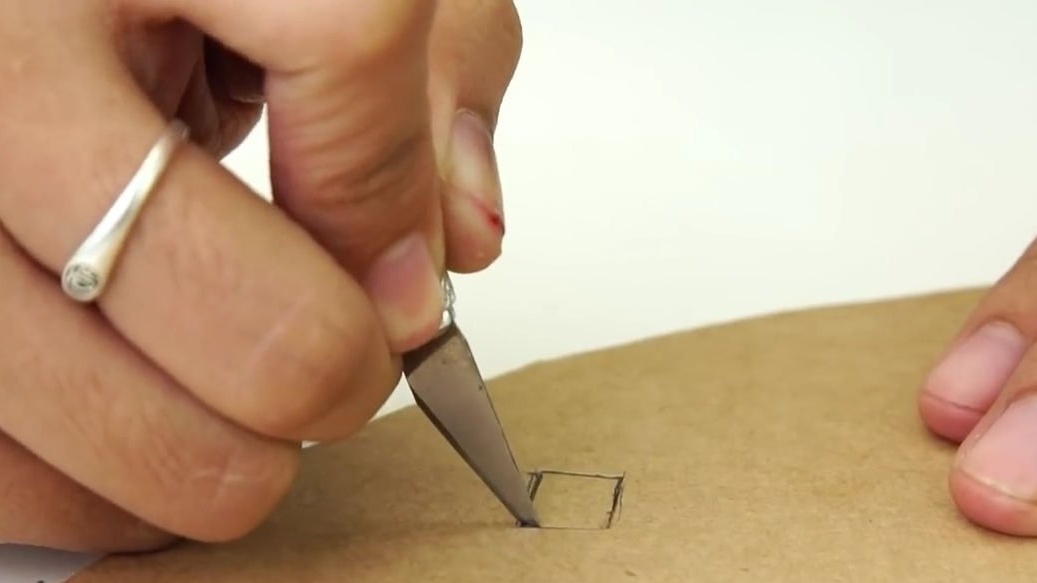
Després retallem un rectangle de mida petita del mateix cartró. Agafem un regle i un llapis, amb un llapis dibuixem un cartró amb un interval d’aproximadament 1 cm Després d’aquest procediment, agafem un ganivet clerical i fem petits talls de la capa superior de cartró, sense tocar el fons. Això és necessari perquè la cartolina sigui més elàstica:



Girem la peça primerenca feta al voltant d’un dels cercles de cartró i, per descomptat, la colem amb cola calenta:

Anem a tractar l’electrònica i la part mecànica.
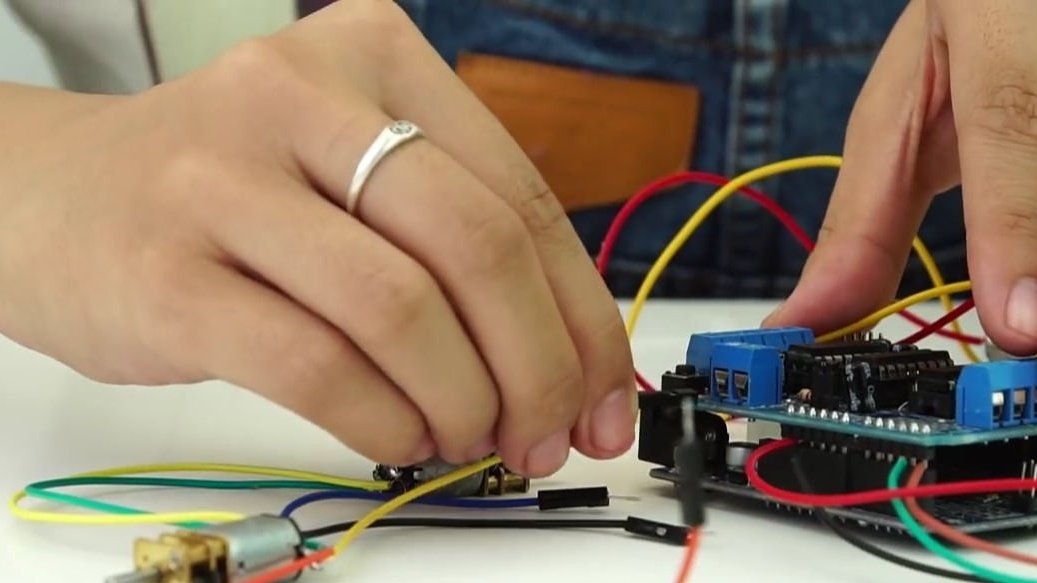
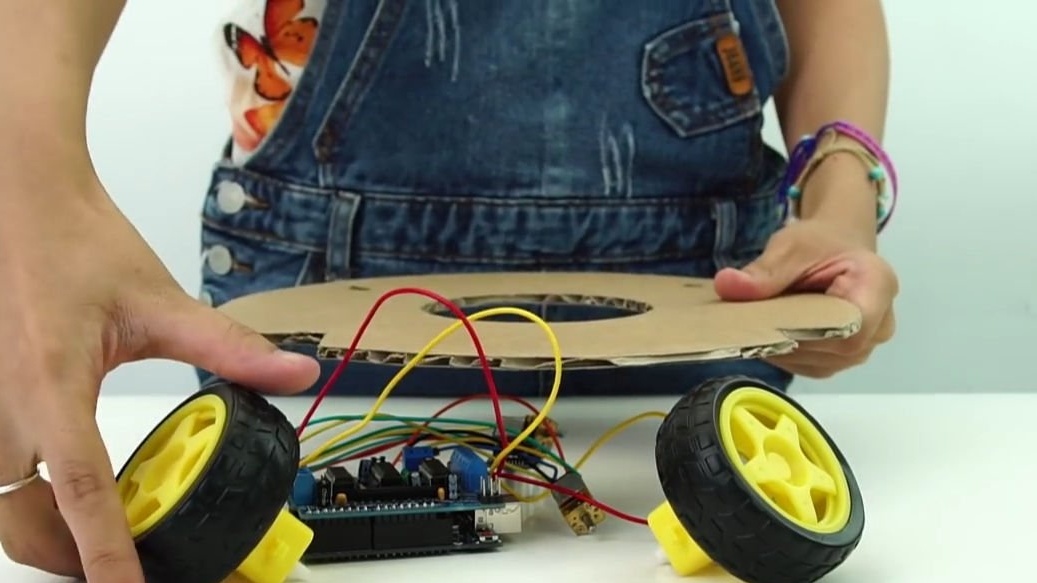
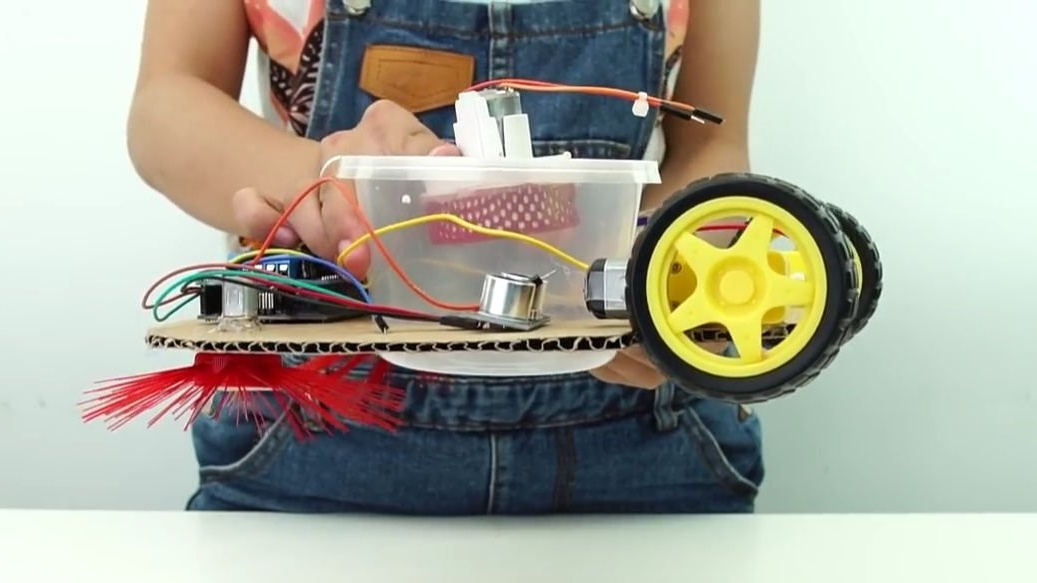
Per començar, agafem el motor d’engranatges i hi posem una roda, fem el mateix amb el segon motor:

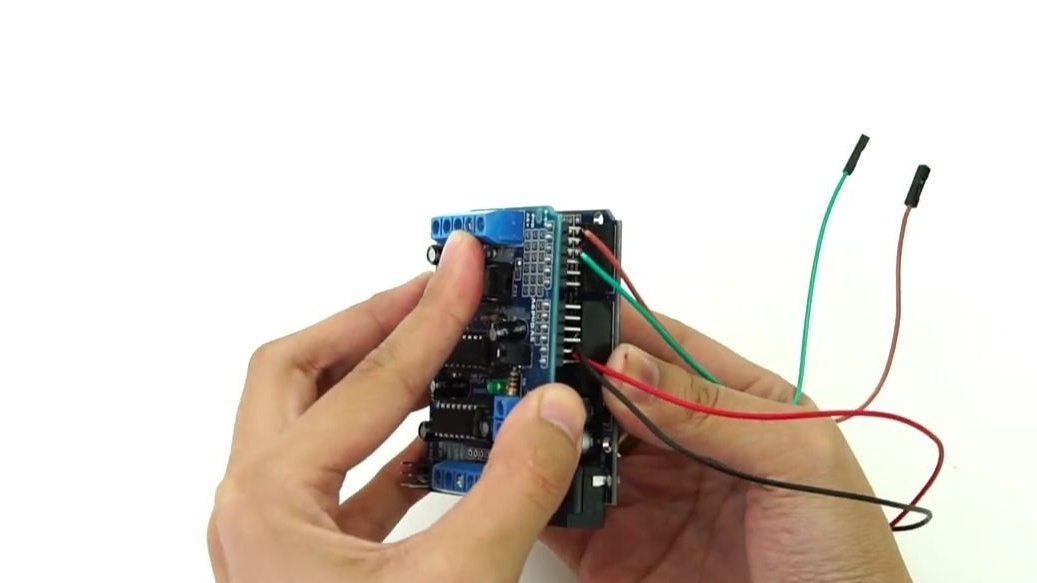
Després agafem la placa Arduino Uno i els cables de connexió, que al seu torn han de connectar-se a certs pins (contactes) de la pissarra. Per comoditat, agafem diferents colors: connectem el vermell a 5 volts, el negre a GND i els altres dos a dos pins diferents. A quins pins connecteu els cables, heu de conèixer immediatament a la base del codi o escriure els pins als quals es connecten els cables. En general, no hi ha res complicat, connectem:

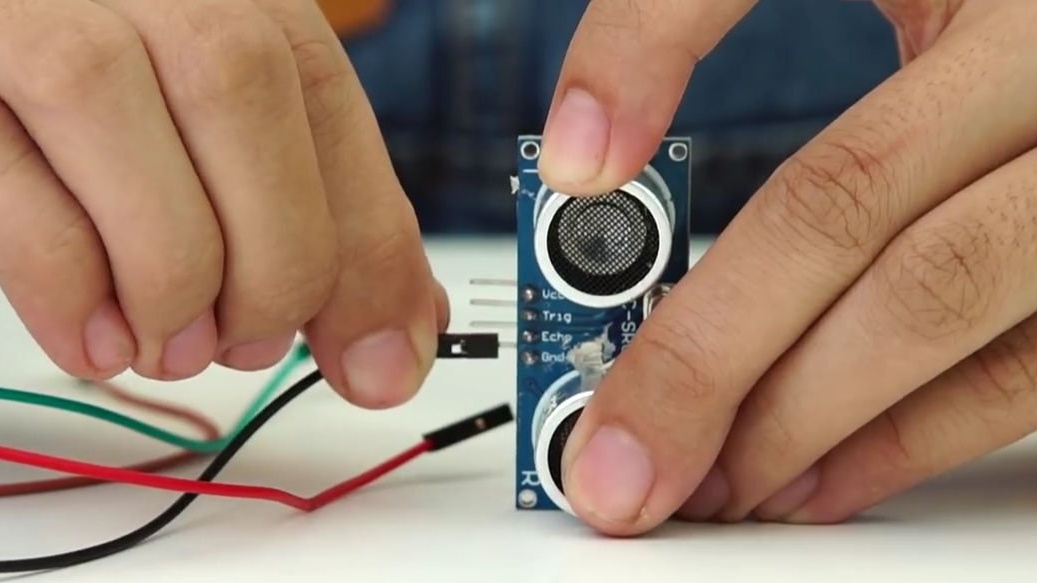
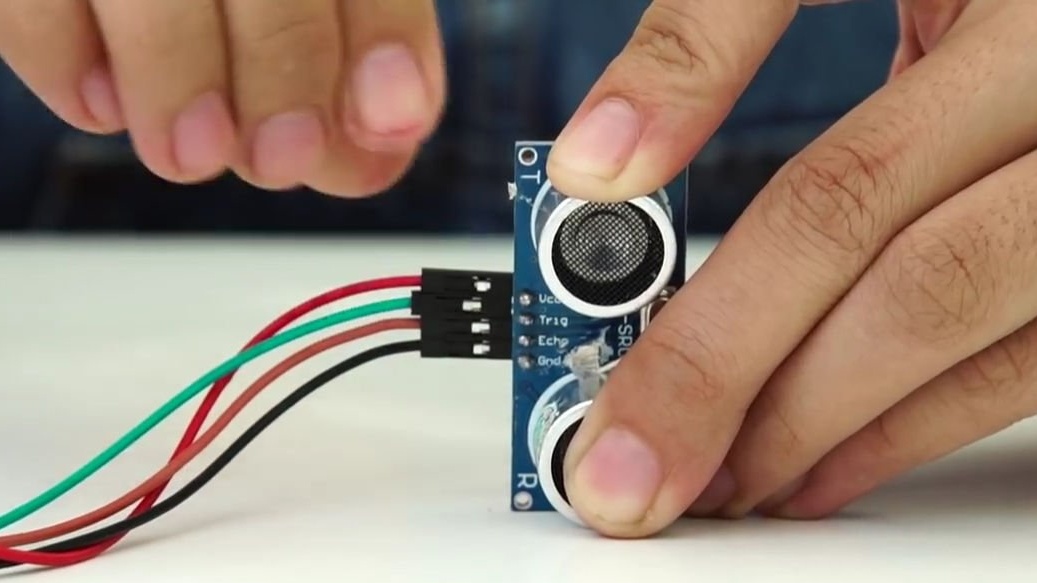
Connectem el costat oposat dels cables al cercador d’àudio ultrasònic tal com es mostra a la foto de sota, si no està clar, podeu veure el vídeo de l’autor.
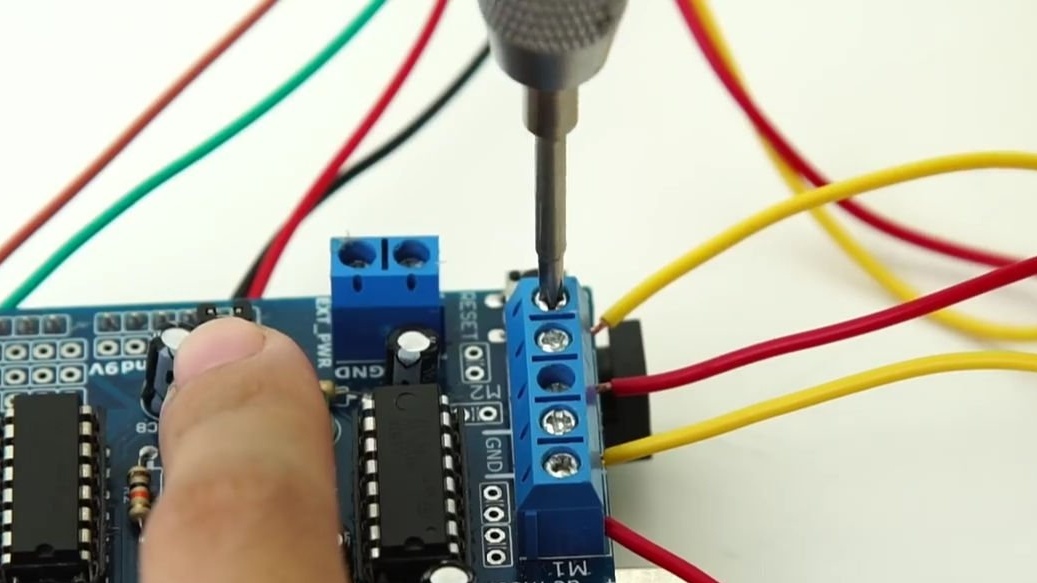
Connectem els motors d’engranatges amb el conductor del motor, ni tan sols cal que sougueu res, només l’heu d’introduir a les pinces i això és:
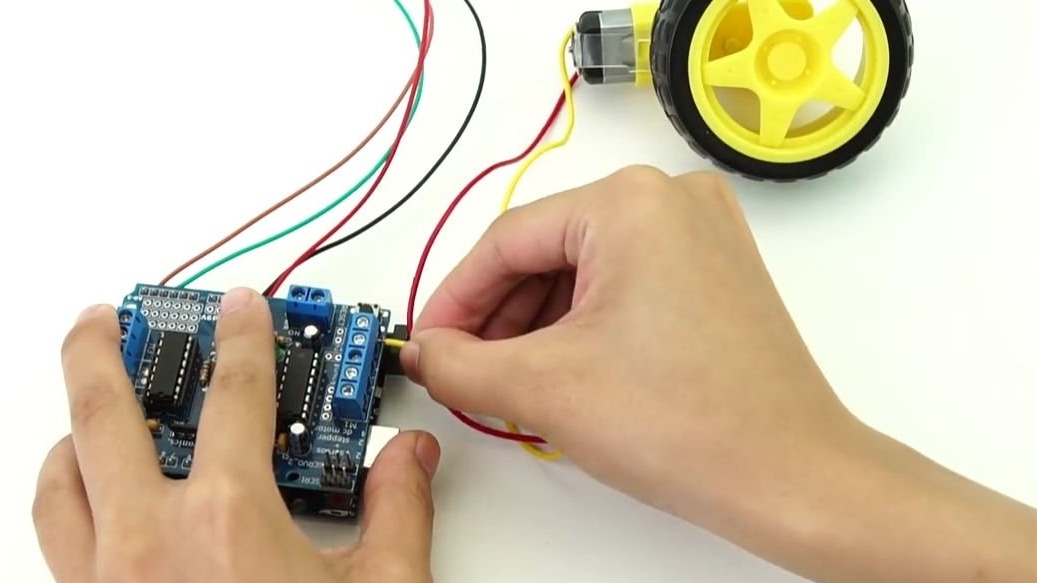

Cal soldar els cables de connexió als mini motors, amb l’ajut dels quals, connectarem aquests mateixos motors al conductor. En general, connectem:
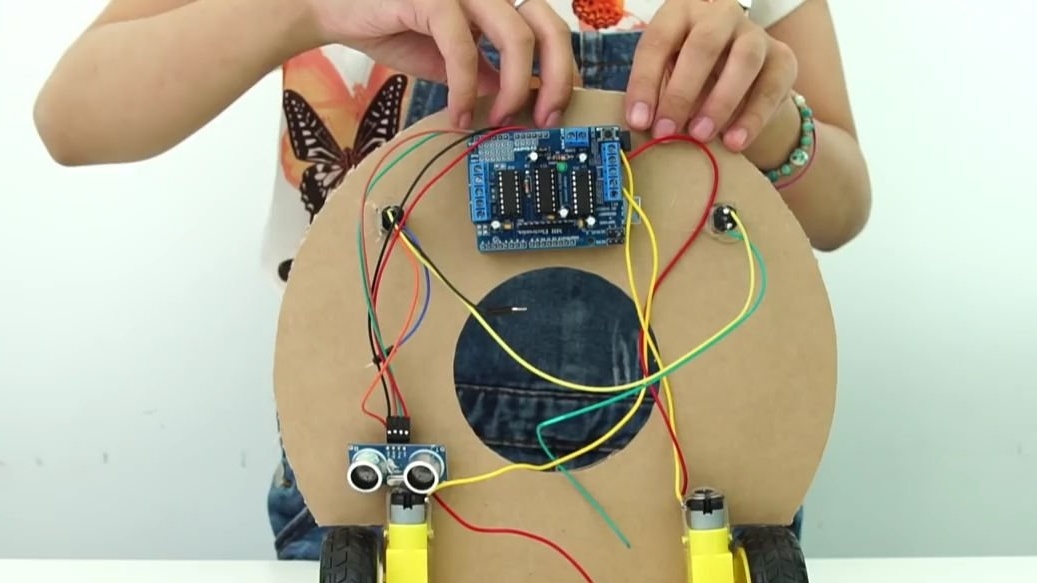
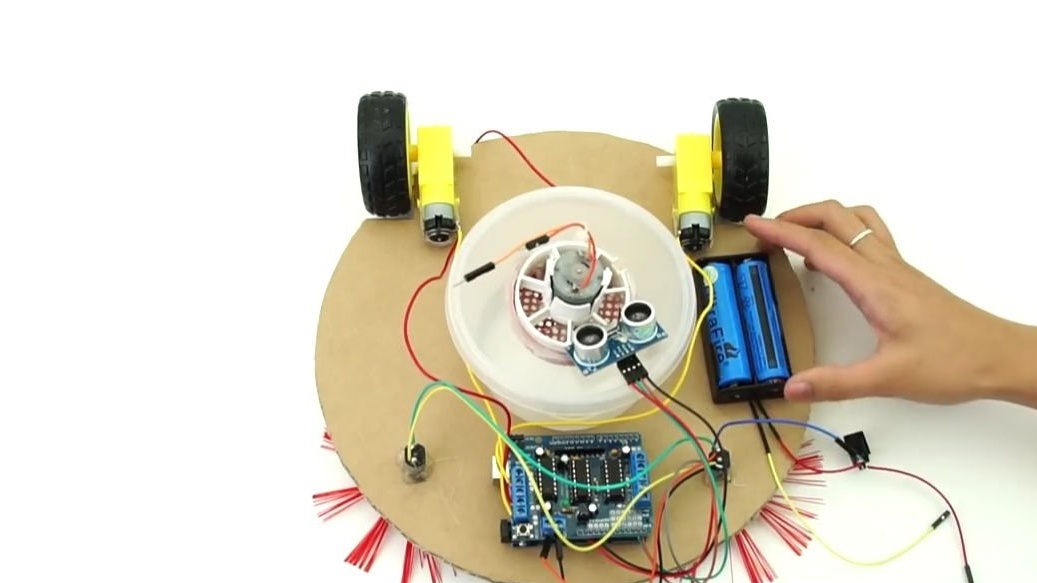
Ara agafem el cercle de cartró que queda, que es va fer al principi. Al damunt, heu de dibuixar un altre cercle al centre i diversos rectangles. Podeu veure tot el marcador a la foto següent. Després retallem els forats marcats, hauria de sortir de la mateixa manera que a la foto següent:

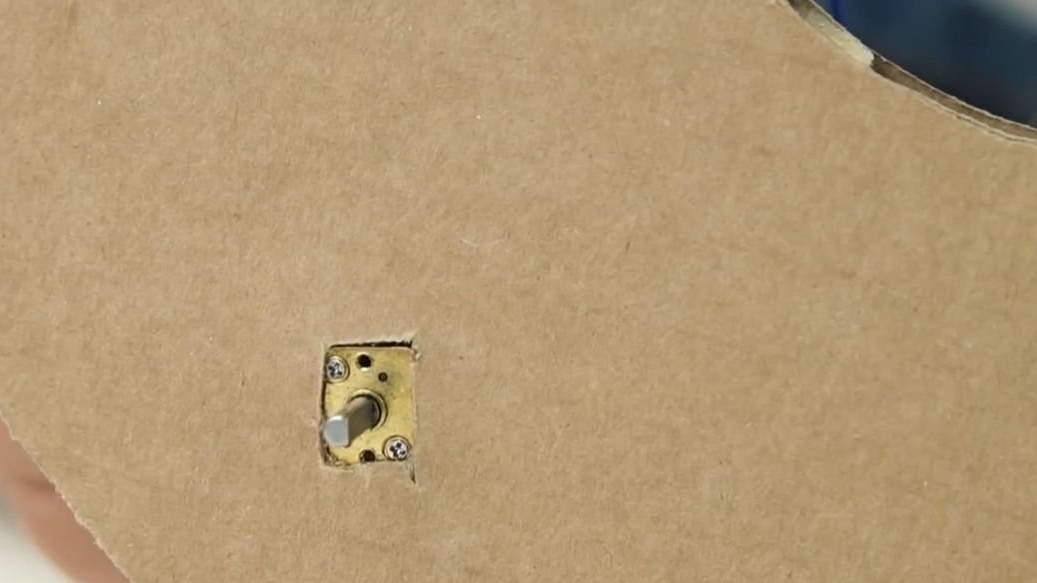
Agafeu el conjunt electrònica i col·loca-la sobre un cercle de cartró fet anteriorment. Inserim petits motors als forats rectangulars ranurats i fixem la resta de l’electrònica a l’adhesiu de fusió calenta, enganxem motors d’engranatges grans en paral·lel a la part posterior i no toquem el telescriptor d’ultrasons.

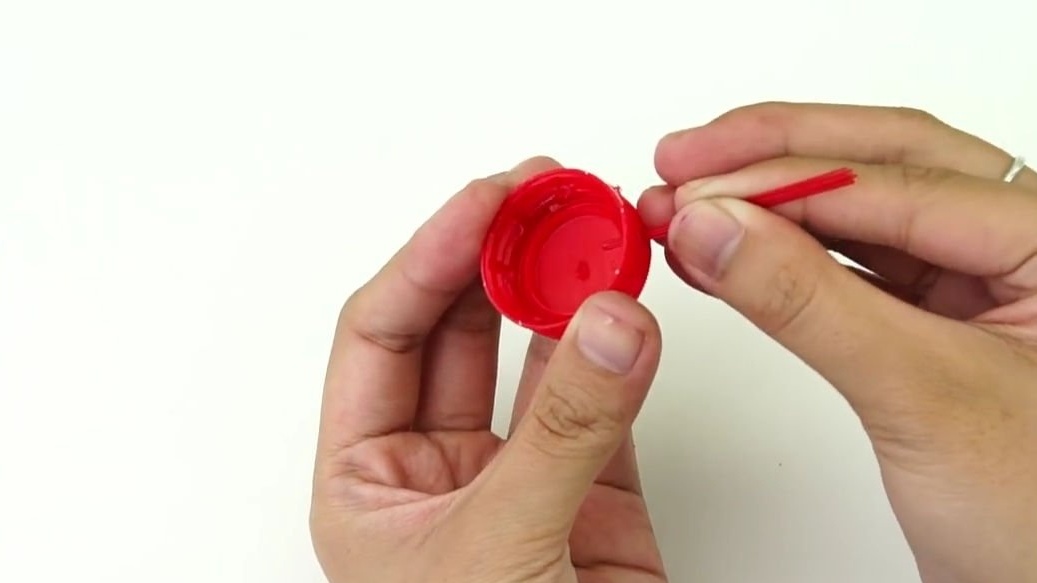
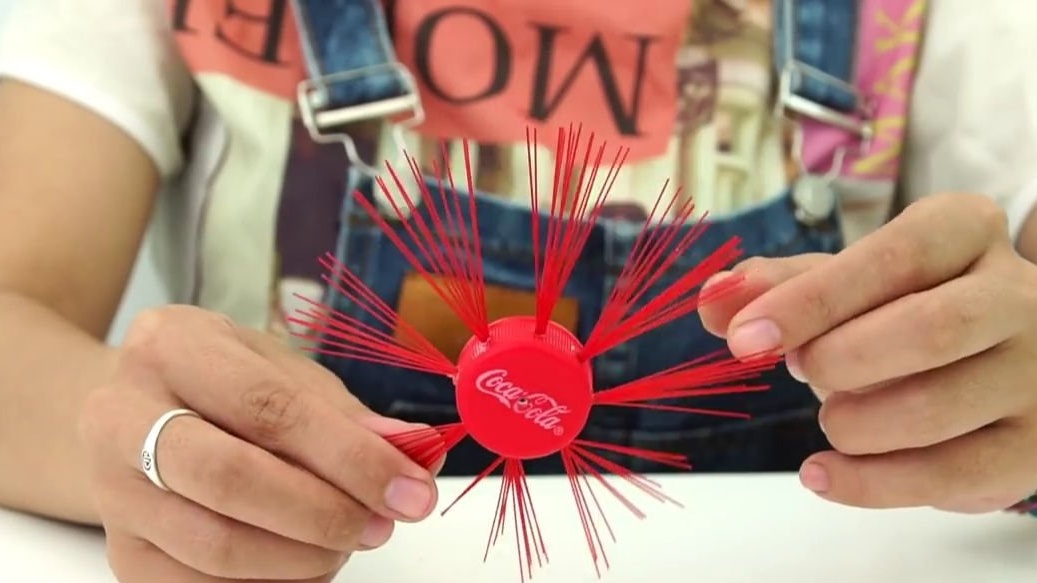
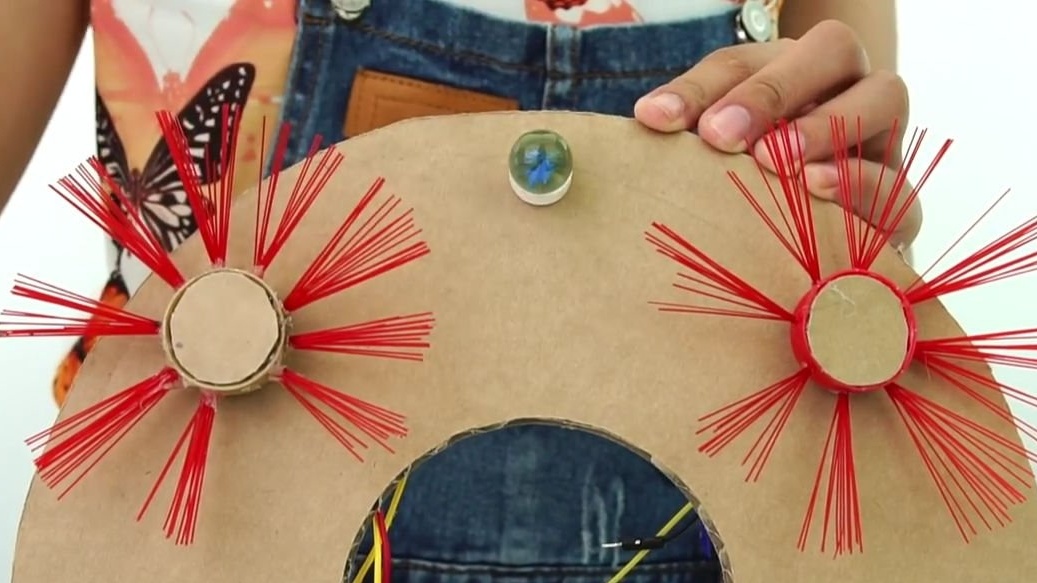
Retirem els taps de les ampolles de plàstic, només necessitem dues peces. Amb una planxa de soldadura, una ungla calenta o un cordó, fem forats: un al centre de la tapa i l’altre als laterals amb un sagnat d’uns 1 cm. Als forats dels laterals, traiem les truges prèviament preparades de l’escombra, haurien de tenir la mateixa mida. Arregem aquestes truges amb cola calenta. En total, s'han de fer dos espais tancats.
Els colem sobre l’eix de petits motors, que es troben en un cercle de cartró. Colegem de nou amb cola calenta:


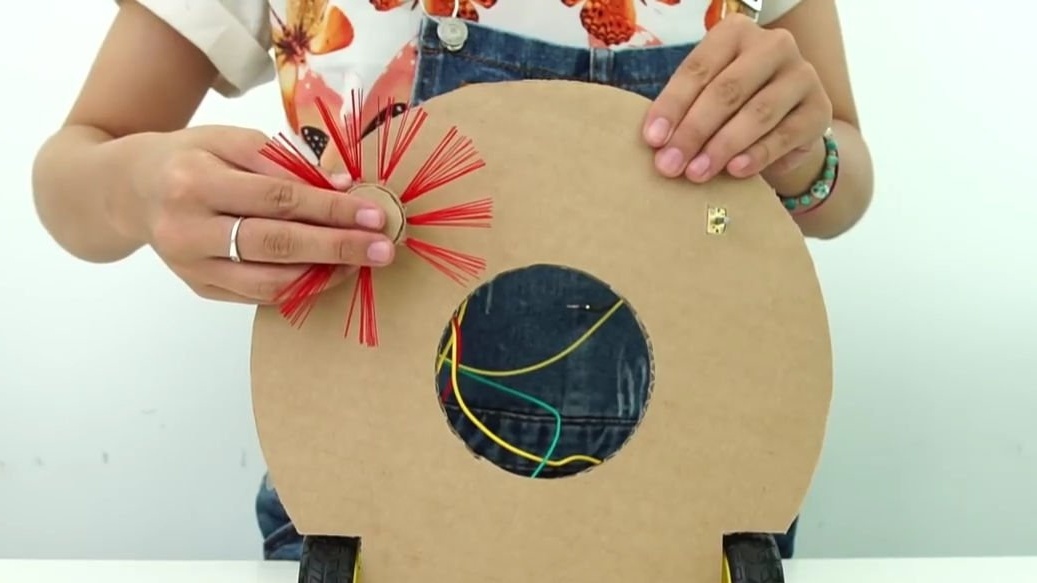

A la part frontal, entre dos pinzells, cola una bola petita o una petita roda que pugui girar al voltant del seu eix:
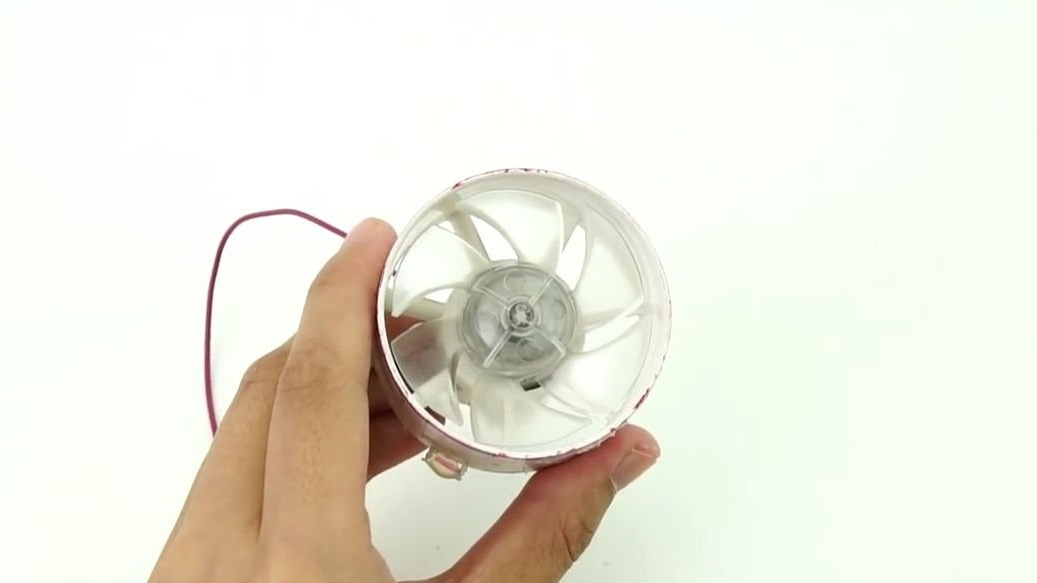
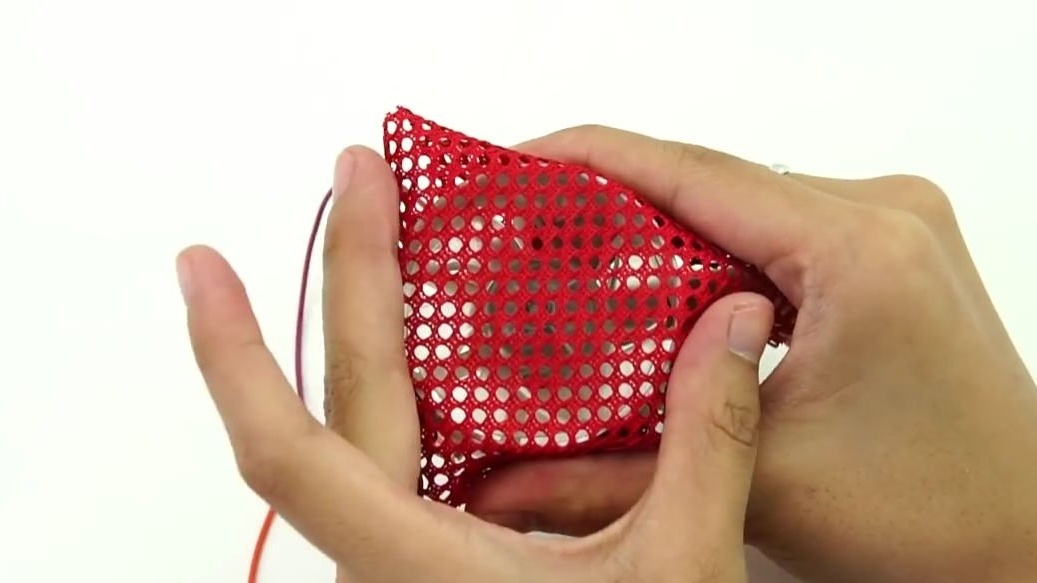
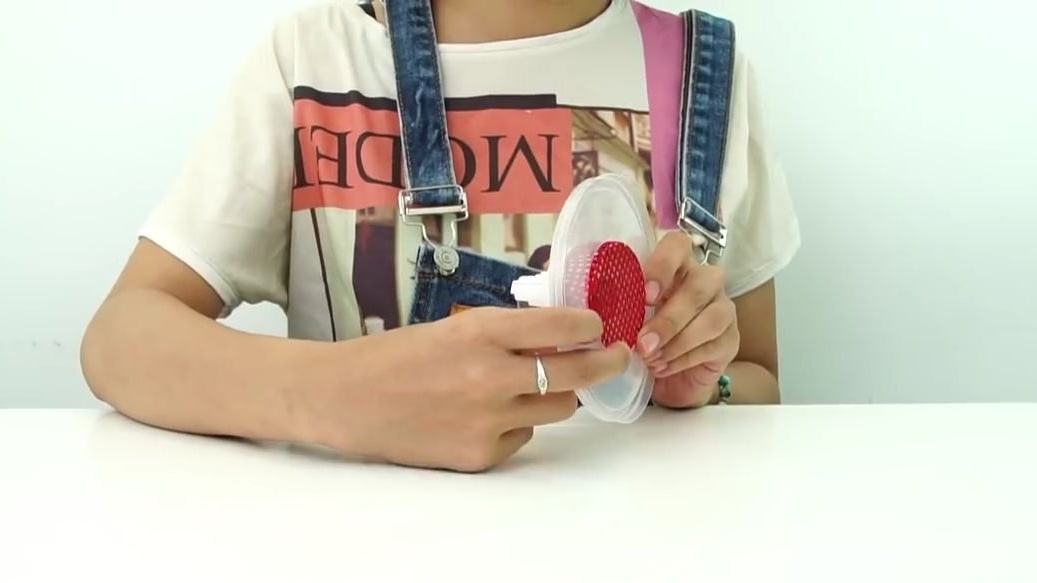
Ara necessitem un motor elèctric amb una turbina que pugui aspirar aire i, en general, pot aparèixer un refrigerador molt potent. Posem i fixem una malla de plàstic a la part davantera de la turbina, cal protegir la turbina, és a dir, per evitar que entrin i surtin grans deixalles. Traieu la tapa del recipient de plàstic. El contenidor ha de tenir preferiblement una forma rodona. A la tapa fem un forat uniforme rodó en el qual cal introduir i enganxar la turbina amb una malla. Al contenidor mateix, fem un petit forat rectangular amb la vora. Posem la tapa amb la turbina al contenidor i ja estàs acabat. S'ha acabat la part de succió del robot. Vull recordar-vos que tot s’ha de fer tal i com es mostra a la foto següent:



Agafem la base del robot i instal·lem un recipient amb una turbina al forat central i colem tot fermament amb cola calenta. Després, al costat de l'estructura, instal·lem una caixa amb piles 18650 i un interruptor connectat a un dels cables que provenen de la caixa. Connectem nous cables per alimentar Arduino, fem talls de cabell final i podem continuar.
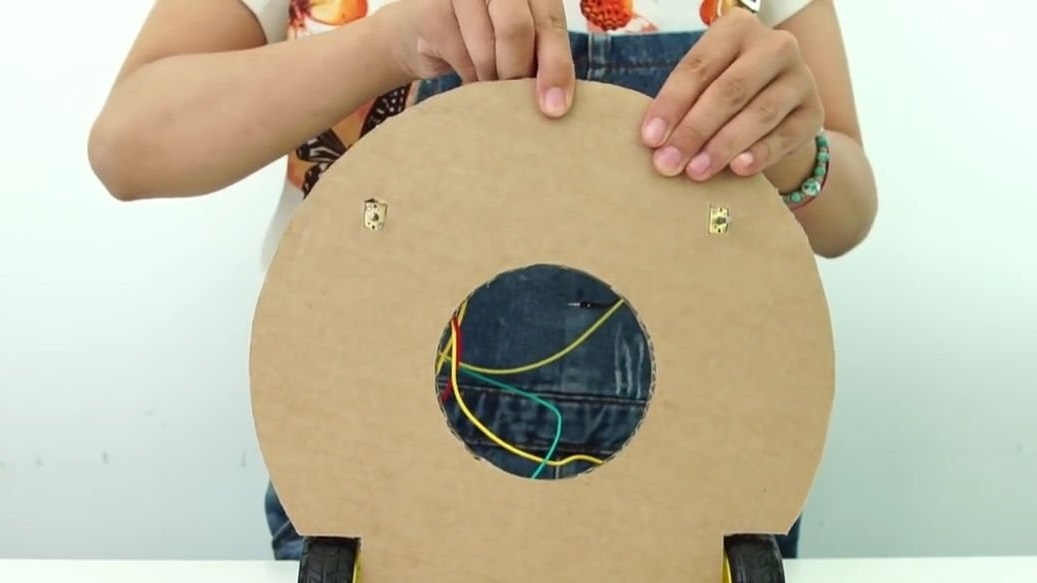
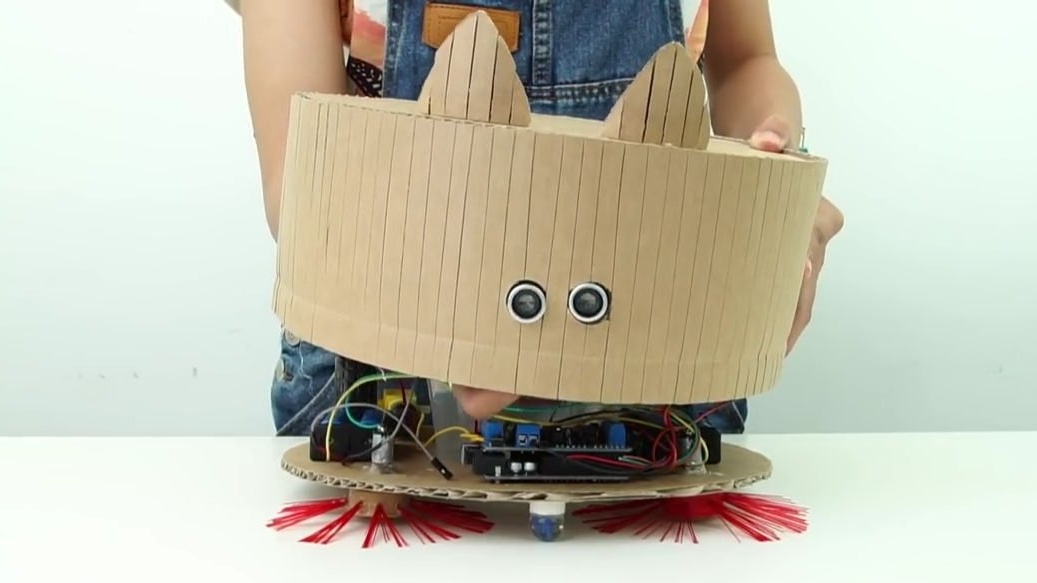
Inserim el cercador d’ultrasons en els forats especials que s’han de fer amb antelació al cos del robot. Aquest edifici, com podeu recordar, es va fer al principi. L’autor de l’article també va afegir elements decoratius en forma d’orelles, i en lloc de l’ull surt un telemetre ultrasònic, tot això sembla molt bo. Posem el estoig sobre la base de l’estructura i l’arreglem, però no gaire, ja que en aquest cas, haureu d’aconseguir que les bateries es carreguin.Per descomptat, podeu instal·lar un model per carregar bateries directament al robot, però és poc probable que substitueixi la càrrega de gran qualitat.
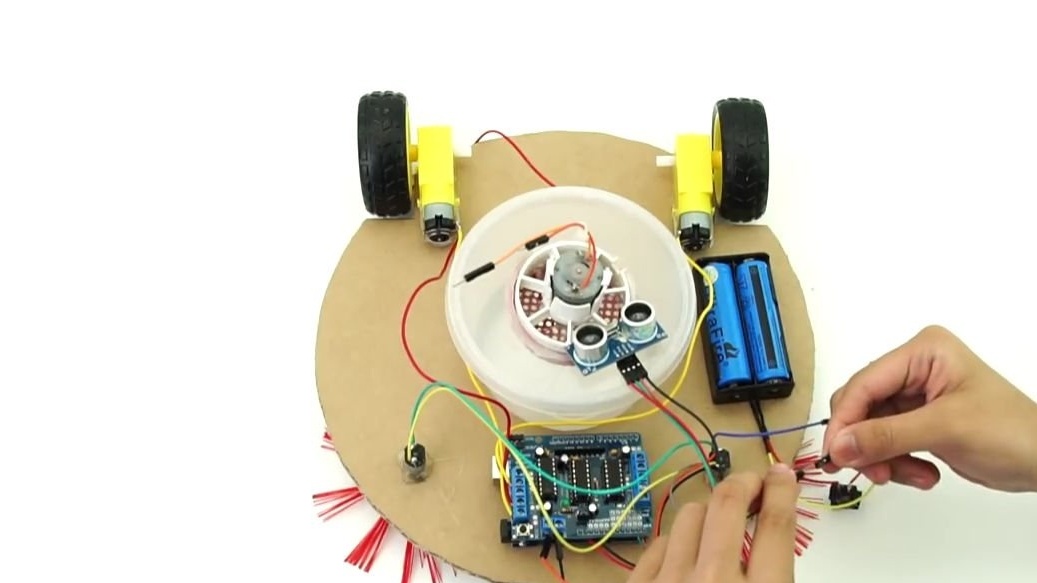

Resta només carregar el firmware a Arduino, en general, és millor fer-ho després de connectar tots els components electrònics per comprovar el circuit i el codi, però ho podreu fer més endavant. El millor és escriure un esbós per a Arduino a tu mateix, però simplement podeu trobar a Internet un esbós preparat per a robots amb un sensor d’ultrasons que suposa un obstacle, el benefici d’aquests esbossos ja és complet. Però per evitar diversos entrebancs, és millor escriure de manera independent per si mateix.
Doncs bé! Un aspirador robot simple i funcional ja està a punt i només queda provar-lo. Per fer-ho, només cal que enceneu i comenceu a muntar a terra i buideu tota la brossa. El robot es mou i gira quan l’obstacle s’acosta, i això és molt més convenient que els models anteriors.



Aquí teniu un vídeo de l’autor amb un muntatge detallat i proves casolanes:
També podeu alimentar aquest robot des d’un poderós banc, podeu veure la meva revisió detallada per a un de bo, per descomptat, a qui li interessarà:
Bé, a tots, molta sort en futurs projectes, amics!