


Al cercle dels coeters d'aquest node, és habitual utilitzar el terme aviònica: aviònica. Sincerament, no entenc molt per què. En la gran majoria dels casos, el node només és responsable de desencadenar el sistema de rescat, si és més fresc, el registre de dades de vol i la gravació de vídeo. Però el concepte d'avionisme té una definició clara: "La Força Aèria ha desenvolupat històricament una clara divisió d'equips d'avió (Avions) en aviònica (AEC), pel seu treball emet i / o rep ones de ràdio) i equips d'aviació (AO). La majoria de sistemes AO també contenen electrònica components i components, però no utilitzeu ones de ràdio durant el seu funcionament. "
A partir d’aquestes definicions, seria molt més lògic utilitzar el terme equip d’aviació, o simplement aviònic. Però aviònics tan aviònics.
A partir d’aquestes definicions, seria molt més lògic utilitzar el terme equip d’aviació, o simplement aviònic. Però aviònics tan aviònics.
Hi ha moltes variacions i solucions per a aquesta tasca: temporitzadors, en els quals el paracaigudes és expulsat al cap d’un temps determinat, que es calcula abans del vol, sensors d’inclinació òptica (LED). Però, degut al fet que vivim en una societat i en un temps on totes les tecnologies digitals sofisticades estan a l’abast de tothom, s’han utilitzat àmpliament els circuits intel·ligents capaços de mesurar l’altura. Aquests esquemes es basen en altímetres (altímetres), a més de ser un sensor de pressió baromètric. Com crec que tothom sap que la pressió atmosfèrica és diferent segons l’altitud. És per això que l’elevat punt d’ebullició de l’aigua és més baix a les muntanyes i els membres de l’expedició poden patir inanició d’oxigen. En condicions de vida ordinàries, una persona no és capaç d’atrapar la diferència de pressió atmosfèrica, aquests dispositius també poden registrar canvis en literalment de 10 centímetres.
És un d’aquests dispositius que vull descriure avui. Sense un toc de consciència, confesso que l’esquema no és el meu. L'autor del dispositiu és el coet-model francès Boris Duro (espero que sigui correctament traduït al rus).
Aquest és el dispositiu “més jove” proposat per Boris, però té una funcionalitat suficient per a un bon començament. Primer, anem per sobre de la seva feina. Després d 'engegar, el dispositiu es troba connectat al terreny, comprova la integritat del fusible i emet un senyal: intermitent de curta durada, intermitent danyat durant molt de temps. El senyal sonarà abans de l'enlairament, independentment de la facilitat de servei o mal funcionament del fusible després de l'enlairament, el circuit començarà a mesurar l'altitud.L’enlairament es considera que és una elevació de més de 20 metres, en assolir l’apogeu, l’aparell activa el fusible i, utilitzant un xifrat senzill, gira de forma contínua l’altura de l’apogeu en cercle. Sembla així: un senyal llarg: 100 metres, un curt de 10 metres. És a dir, diguem que el dispositiu emet 5 senyals llargs i 3 curts, cosa que significa que l’alçada de l’apogeu és de 530 metres. Aquest "missatge" està girant fins que el dispositiu no s'ha apagat. Les dades no s’emmagatzemen a la memòria i, després d’encendre-la, tot el cicle comença de nou. Sí, aquest dispositiu no registra dades de vols, com molts dels seus anàlegs, però per als primers vols aquesta és una opció més que adequada. A més, el circuit realitzat en components plans és tan petit que és fàcil d’encaixar fins i tot en el coet infantil més petit.
Aquest és el dispositiu “més jove” proposat per Boris, però té una funcionalitat suficient per a un bon començament. Primer, anem per sobre de la seva feina. Després d 'engegar, el dispositiu es troba connectat al terreny, comprova la integritat del fusible i emet un senyal: intermitent de curta durada, intermitent danyat durant molt de temps. El senyal sonarà abans de l'enlairament, independentment de la facilitat de servei o mal funcionament del fusible després de l'enlairament, el circuit començarà a mesurar l'altitud.L’enlairament es considera que és una elevació de més de 20 metres, en assolir l’apogeu, l’aparell activa el fusible i, utilitzant un xifrat senzill, gira de forma contínua l’altura de l’apogeu en cercle. Sembla així: un senyal llarg: 100 metres, un curt de 10 metres. És a dir, diguem que el dispositiu emet 5 senyals llargs i 3 curts, cosa que significa que l’alçada de l’apogeu és de 530 metres. Aquest "missatge" està girant fins que el dispositiu no s'ha apagat. Les dades no s’emmagatzemen a la memòria i, després d’encendre-la, tot el cicle comença de nou. Sí, aquest dispositiu no registra dades de vols, com molts dels seus anàlegs, però per als primers vols aquesta és una opció més que adequada. A més, el circuit realitzat en components plans és tan petit que és fàcil d’encaixar fins i tot en el coet infantil més petit.
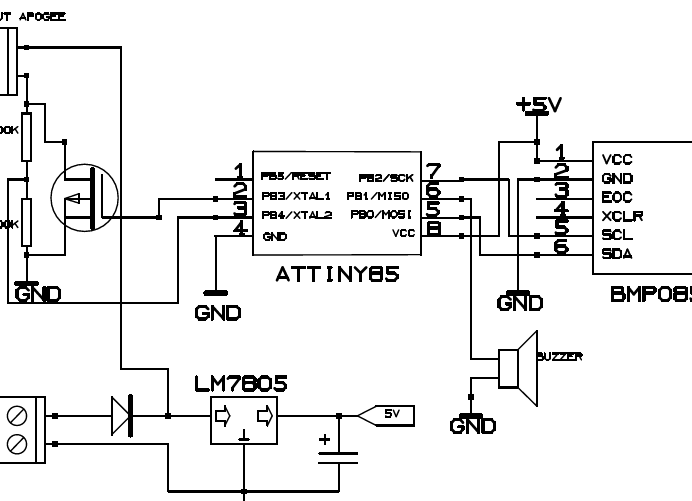
A sobre podeu observar el diagrama de circuits del dispositiu. L'esquema es va extreure del lloc de Boris, però val la pena assenyalar que té un cant que pot resultar enganyós. El diagrama mostra una designació gràfica d’un transistor d’efecte de camp de canal p, quan en realitat s’utilitza un canal n. Quin transistor no és imprescindible per utilitzar, qualsevol canal n d’alta corrent.
Per a la fabricació necessitareu:
- Mòdul Baròmetre BMP180
- Microcontrolador 85
- Condensador electrolític 47 mF, 16 V
- Resistències de 100 kΩ i 2 kΩ
- Estabilitzador 78L05 en allotjament TO92 o equivalent en SMD
- Transistor d’efecte de camp d’actualitat IRF540 / IRFZ44 o equivalent en versió SMD
- Coixins per a cables 2 peces.
- 5 timbre actiu
- Díodes 1N4001 o 1N4007. Opcionalment, es tracta d’una protecció contra l’aturada.
- Textolita
Des de l'eina:
- Planxa de soldar
- Pinces
- Cisalles laterals
- Soldadura
- Flux
- Programador USBasp
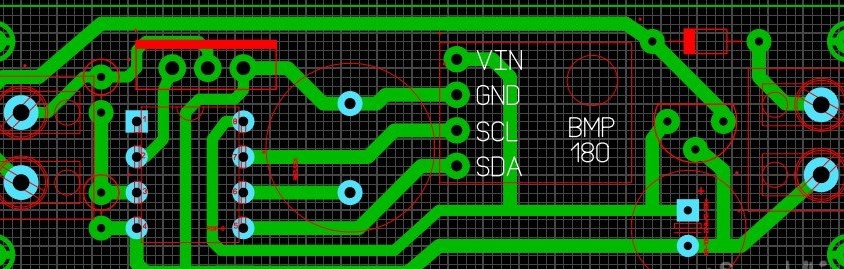
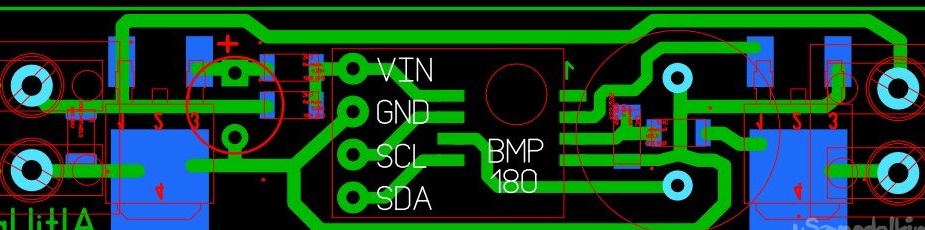
A l’arxiu següent hi ha dos fitxers de la placa de circuit, per a components SMD i per a cables de sortida convencionals. He de dir de seguida que no vaig recollir la segona placa, ho vaig fer en SMD, però per a aquells que per algun motiu no poden soldar components planos petits, vaig fer un rastre per a components habituals. Tot i això, he comprovat diverses vegades, ha de ser lliure d'errors.
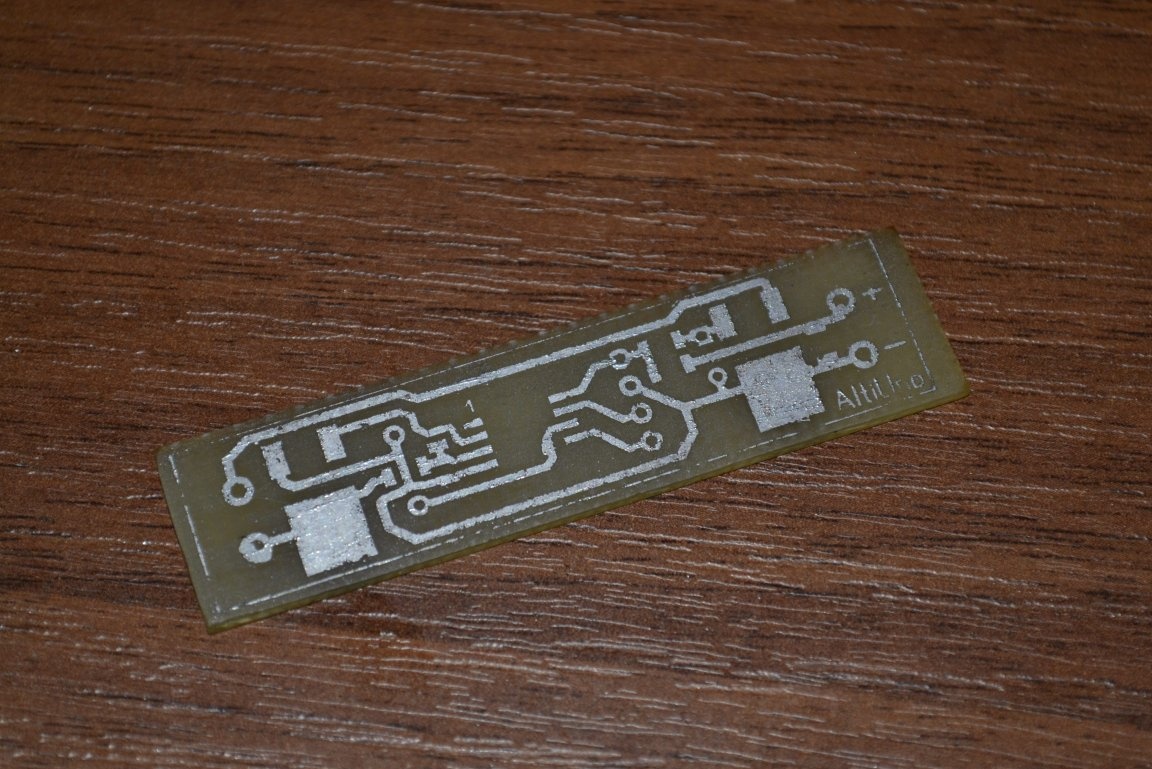
Per tant, el primer que fem és fer una placa de circuit imprès. Jo, com és habitual, vaig fer LUT.
I soldar tots els components SMD excepte el controlador.
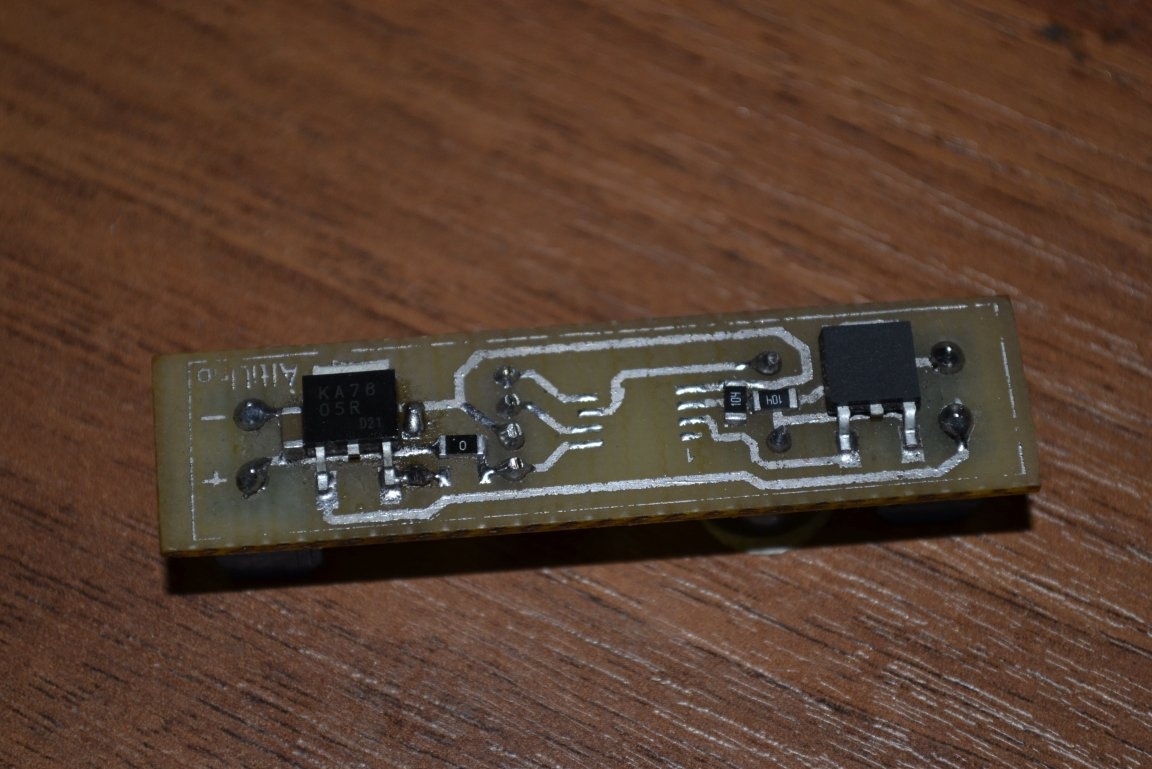
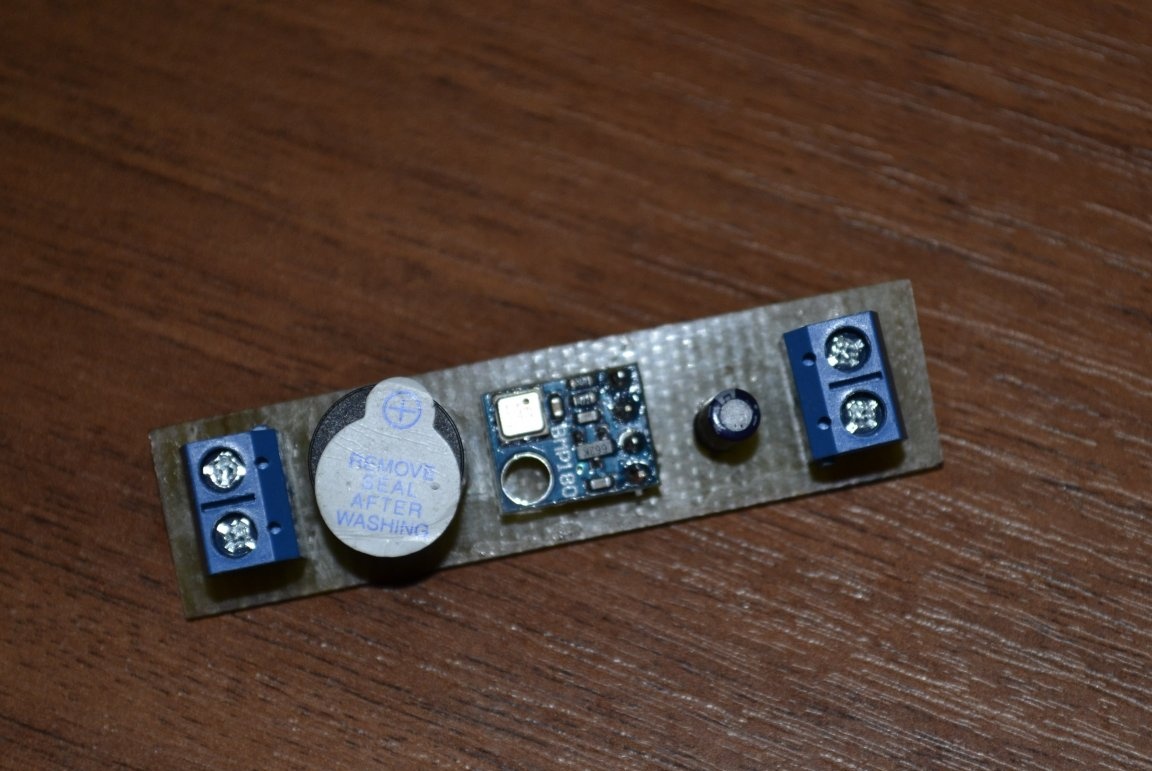
A continuació, solda el timbre, el sensor, les pastilles i el condensador.
Ara necessiteu fer servir el controlador. El firmware d'aquest circuit està escrit en un entorn arduino, per la qual cosa heu d'introduir el carregador d'Arduino al controlador. Això es fa mitjançant el programador USB ASP directament des de l’entorn de programació arduino. Primer de tot, heu de connectar el controlador al propi programador. El diagrama de connexió es troba a continuació.

Per connectar el controlador en versió SMD, cal un adaptador.

El fitxer amb la placa de circuit imprès també es troba a l'arxiu al final de l'article. Passem ara a les millores del programari. Primer cal fer amics Arduino IDE amb Attiny 85, perquè fora del quadre aquest controlador no és compatible. Per fer-ho, a ... / Arduino / hardware cal crear una carpeta minúscula on col·locar el contingut de l'arxiu amb el nucli. Podeu descarregar l’arxiu aquest enllaçDescarregueu la versió més recent. Ara l’entorn podrà veure el controlador. Connectem el programador, obrim l’entorn arduino, anem a i posem USBasp.
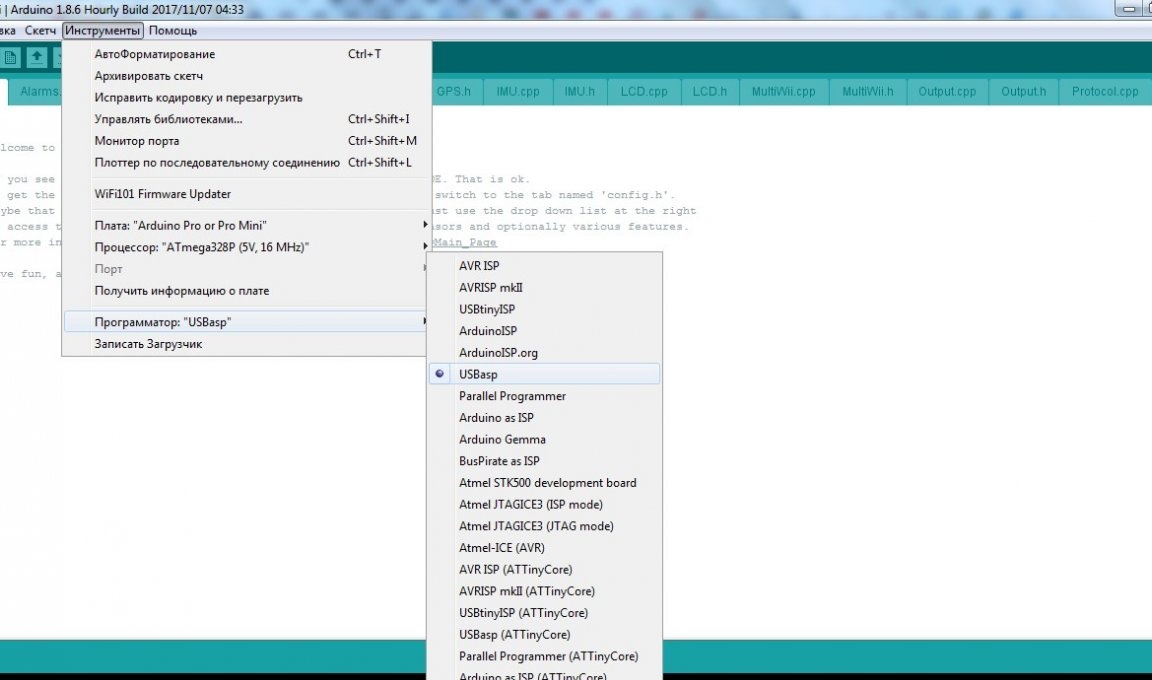
Ara seleccioneu ATtiny25 / 45/85.
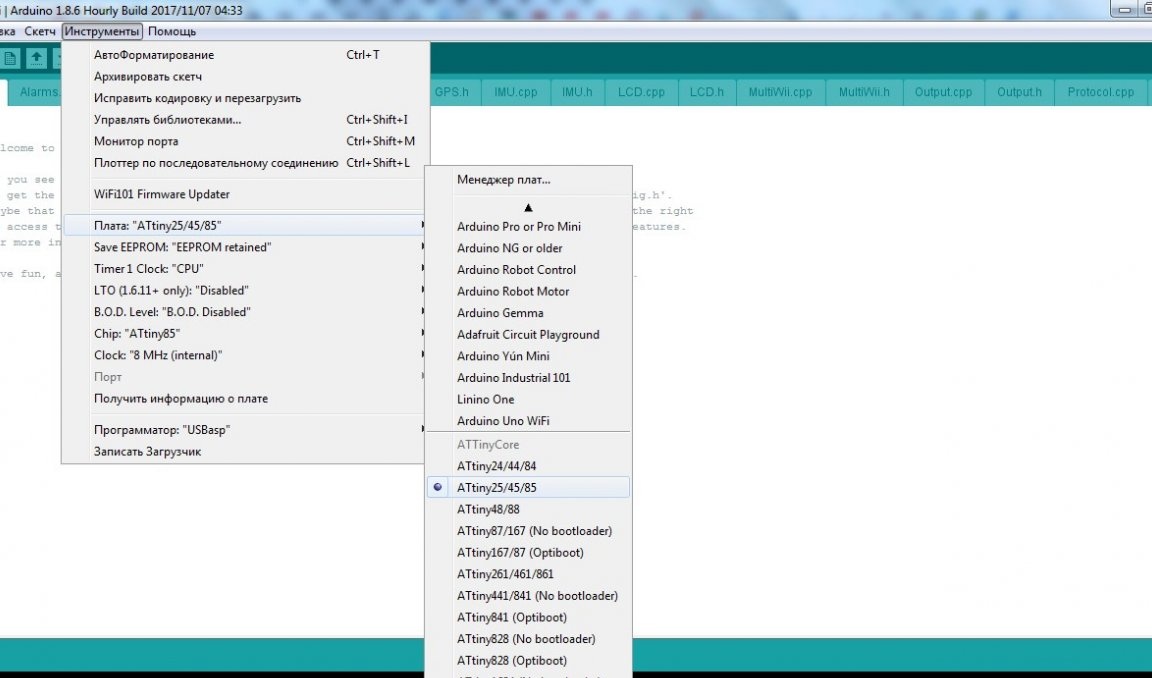
Mirem que ATtiny85 quedaria a Xip. Ara, totes amb les mateixes eines, feu clic. Si tot es fa correctament, no hi ha problemes amb el contacte, i no hi ha problemes amb els controladors, i llavors l'entorn informarà d'una bona gravació. Un gran avantatge en aquest firmware és que no necessiteu molestar-vos amb els fusibles, l’entorn Arduino farà tot. Per tant, no matareu el controlador. Després d’això, podeu emplenar l’esbós. L’esbós s’aboca gairebé de la mateixa manera que sempre, però en lloc del botó habitual cal anar a. Tot això, ara podeu soldar una tink a la pissarra.

Ara passem a les funcions de la meva placa de circuit. Vaig fer un compartiment aviònic per instal·lar-hi una bateria 18650.Com ja sabeu, una bateria de ions liònica completament carregada produeix 4,2 volts, el llindar inferior de la tensió d'alimentació per a Attiny 85 és de 2,7 volts, el nivell crític de descàrrega d'una bateria, és a dir, segons enteneu, la potència és suficient. PERUT! Només si apliqueu energia passant directament a l'estabilitzador. No vaig començar a treure l'estabilitzador del circuit per tal de fer-lo més universal, encara que no estigui involucrat en mi. Així doncs, n’hi ha cinc a la pissarra per a dues resistències.
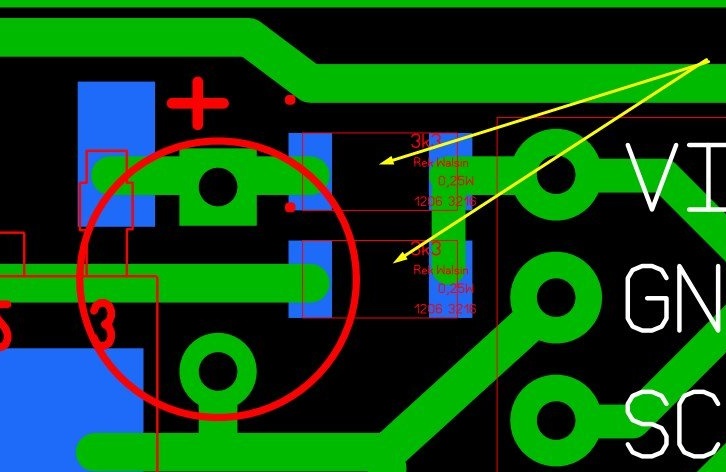
Aquests no són realment resistents. En un parell d’aquests talons cal soldar un pont, l’anomenada resistència zero (es pot fer estúpidament un tros de filferro). Si, com jo, alimentaràs el circuit des d’una font d’alimentació, aleshores solda als contactes inferiors, si mireu la imatge, si teniu la intenció d’utilitzar per exemple una corona, a la part superior, a la sortida de l’estabilitzador. A la placa de circuit imprès, realment tot és visible, què i cap a on va.
Aquesta opció no es proporciona a la pissarra per als components de sortida. Podeu finalitzar el signet tu mateix, afegint, per exemple, un parell de saltadors o, simplement, no soldeu l'estabilitzador ni el soldeu.
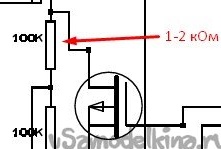
Un altre matís. Quan alimenteu una bateria amb un voltatge de 4,2 volts, pot passar que el transistor estigui obert constantment. Com es pot veure al diagrama, hi ha un divisor entre el desguàs i la font. Per solucionar el problema, heu de substituir una de les resistències per 1-2 kOhm. Quin es mostra a continuació.
Aquesta opció no es proporciona a la pissarra per als components de sortida. Podeu finalitzar el signet tu mateix, afegint, per exemple, un parell de saltadors o, simplement, no soldeu l'estabilitzador ni el soldeu.
Un altre matís. Quan alimenteu una bateria amb un voltatge de 4,2 volts, pot passar que el transistor estigui obert constantment. Com es pot veure al diagrama, hi ha un divisor entre el desguàs i la font. Per solucionar el problema, heu de substituir una de les resistències per 1-2 kOhm. Quin es mostra a continuació.
Ara pel firmware. Hi ha 2 firmwares a l’arxiu, el principal per accionar el fusible elèctric del sistema de rescat i un alternatiu. El firmware alternatiu us permet utilitzar el circuit com a rastre de cerca de so. Com que el circuit és molt compacte, es pot col·locar al carenat del cap del coet, escollint una font d’alimentació compacta. Per fer-ho, en lloc d’un fusible, es connecta un potent emissor de piezo als contactes, similar al que es mostra a continuació.

Algú dirà per què, a la pissarra hi ha un timbre. Sí, però per molt fort que us sembli durant les proves a la sala, de fet, podeu sentir un sostre d’uns 20 metres al camp, en general, els motors de cerca de models són tota una èpica. En els plans futurs, tinc un conjunt de balises GPS, que determinarà les coordenades i les enviarà a l’aire. Les coordenades es reben en una estació de ràdio portàtil (walkie-talkie) i, mitjançant qualsevol telèfon (ara tenen un navegador GPS), es busca un model. Però és als plans, tornarem a la realitat.
Tot i que, en principi, no hi ha res especial per tornar-hi. Es fa un xassís especial per al tauler, gràcies al qual es munta en un coet. El xassís està dissenyat específicament per a la vostra mida el model. El vaig fer a partir de les pastilles més fines que podia comprar en una botiga de construcció i peces de fibra de vidre casolana.
Tot i que, en principi, no hi ha res especial per tornar-hi. Es fa un xassís especial per al tauler, gràcies al qual es munta en un coet. El xassís està dissenyat específicament per a la vostra mida el model. El vaig fer a partir de les pastilles més fines que podia comprar en una botiga de construcció i peces de fibra de vidre casolana.

El tauler està unit al xassís de les bandes de goma ordinàries de papereria. És fàcil d’instal·lar i funciona com un amortidor perquè el sensor no es torni boig.
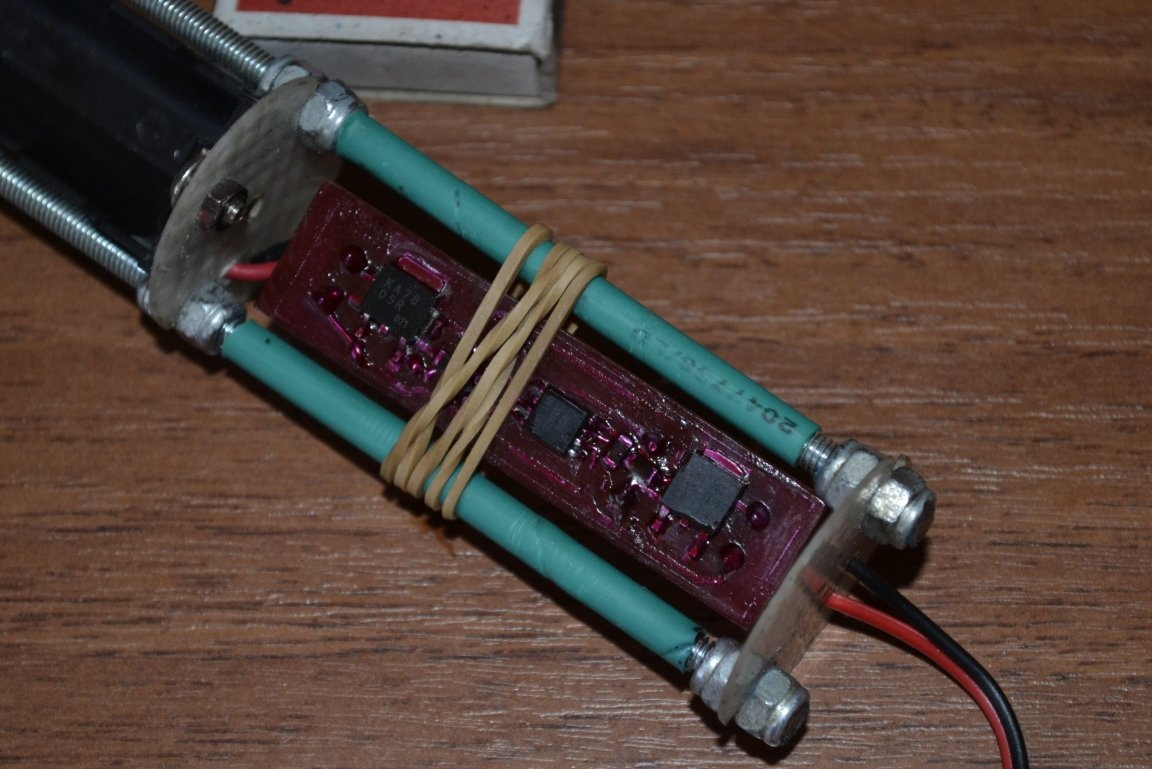
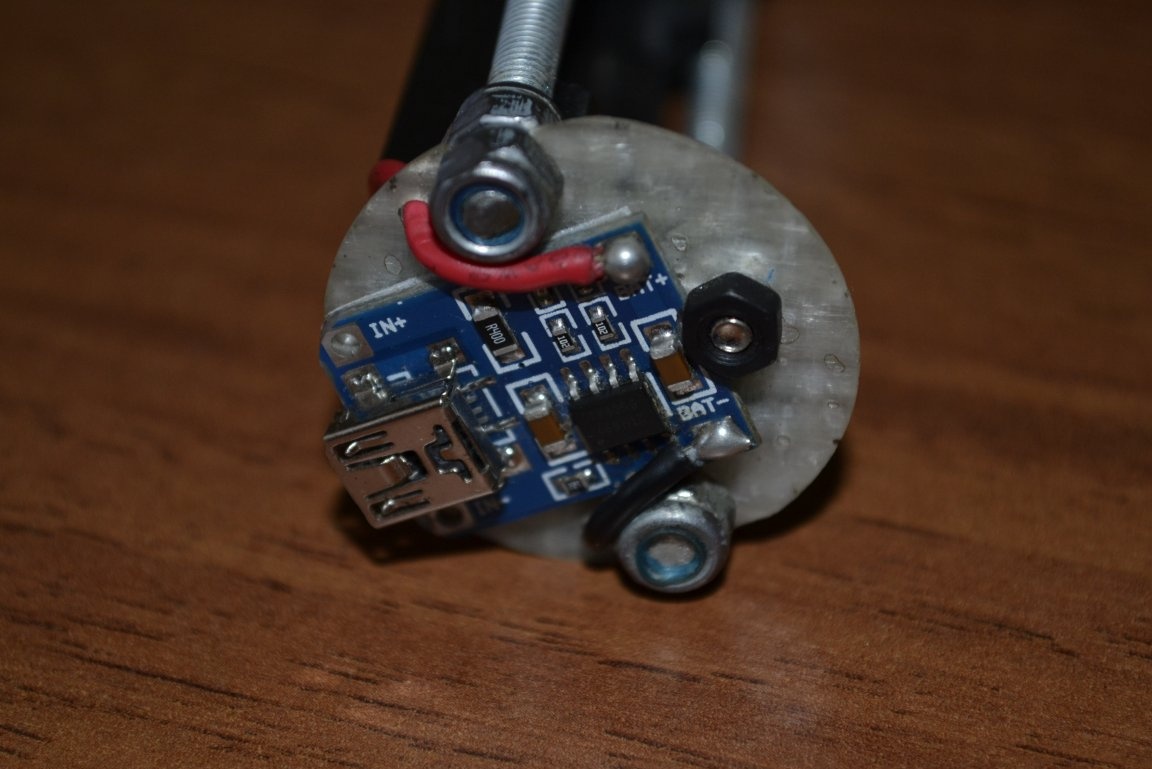
Com podeu veure el tauler des del costat de les pistes que vaig pintar deprimit esmalt, per a una major protecció, per així dir-ho Des del final del xassís vaig decidir adjuntar un mòdul de càrrega, vaig comprar un parell de dotzenes a Ali, costaven com llavors, així que no és una llàstima.
Algunes paraules sobre la verificació. Agafem una gerra (de tal manera que el circuit amb potència s’ajusta) i una tapa de niló. Fem un forat a la tapa i enganxem hermèticament el tub del comptagotes. L’altre extrem del tub està connectat a una xeringa de cubs de 20. Posem l’aparell en una gerra, tanquem i bombem l’aire amb una xeringa. Després de tornar a subministrar aire.
La segona opció. Per consell d’un modelador familiar. Agafem un tub d’una piruleta, una vara d’un bolígraf, un pal de l’orella. Enrotllem diverses capes de cinta elèctrica al final de manera que la cinta elèctrica s’estengui més enllà del tub uns quants mil·límetres. Amb un bon ganivet de muntatge, tallar la vora del tub de la ferida, que seria uniforme. L’aplicem uniformement al forat del propi sensor i traiem bruscament l’aire amb la boca. Primitiva, però funciona.
La segona opció. Per consell d’un modelador familiar. Agafem un tub d’una piruleta, una vara d’un bolígraf, un pal de l’orella. Enrotllem diverses capes de cinta elèctrica al final de manera que la cinta elèctrica s’estengui més enllà del tub uns quants mil·límetres. Amb un bon ganivet de muntatge, tallar la vora del tub de la ferida, que seria uniforme. L’aplicem uniformement al forat del propi sensor i traiem bruscament l’aire amb la boca. Primitiva, però funciona.
I unes quantes paraules, per a aquells que tinguin alguna pregunta, com es determina el clímax. A tots aquests dispositius, això s’implementa de la mateixa manera. En volar, l’altitud actual es compara constantment amb l’anterior. Tan aviat com aquest valor comença a caure per sota de l’anterior (el coet va començar a caure), queda fixat per l’apogeu. Però per tal que no hi hagi falsos positius, es considera que l’apogeu és una caiguda de coets fins a una certa alçada, normalment una baixada de 3 metres (això es corregeix al codi), però per als míssils de vol més alt hi posen més.
Podeu descarregar-vos tots els fitxers necessaris.
Això és tot. Vídeo amb una demostració de pòster a continuació. Tot l’èxit a l’obra!