
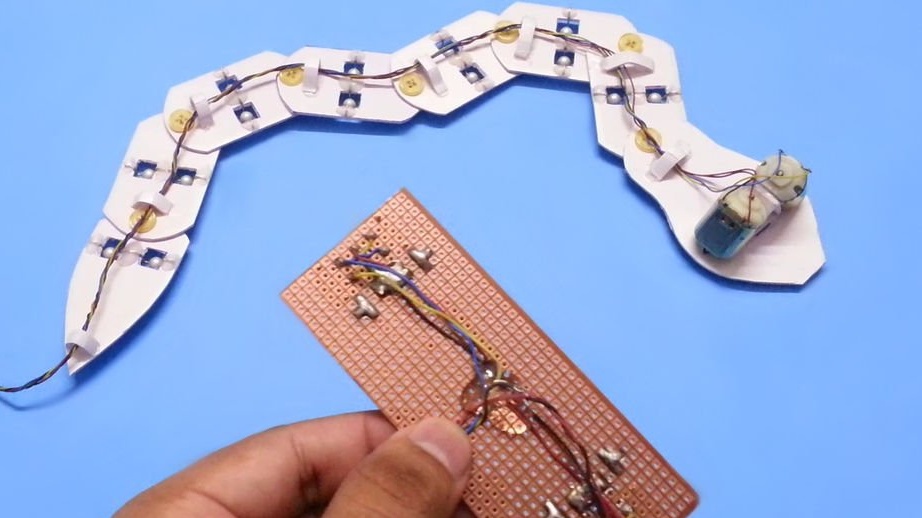

Avui l’autor d’Instructables sota el sobrenom de Techgenie ha parlat d’on electrònica n’hi ha. I va portar un enllaç al primer, en què no ho és, només un electricista. És més elegant i es discutirà en la meva traducció.
Si encara no voleu que en tingueu, mireu el vídeo i desitgeu que aquest dispositiu sigui a casa des dels primers segons de la visualització:
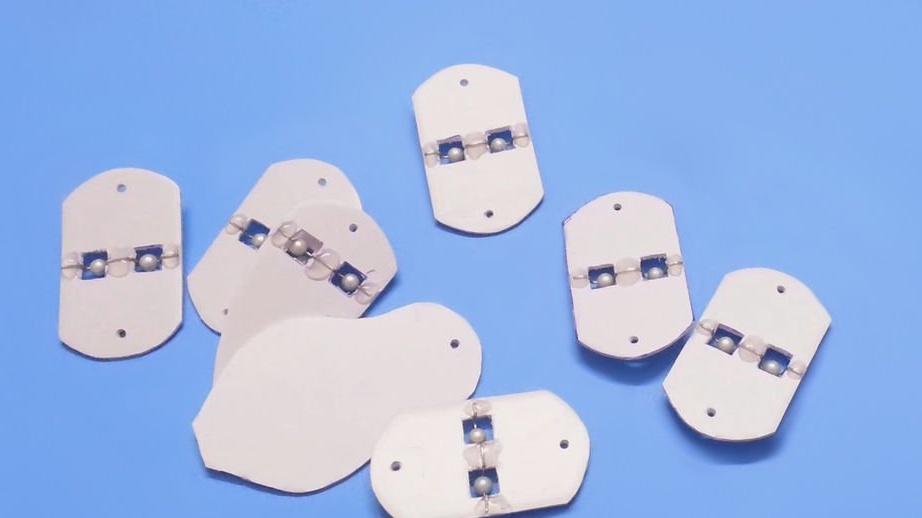
El mestre retalla els enllaços de la serp robòtica del cartró:
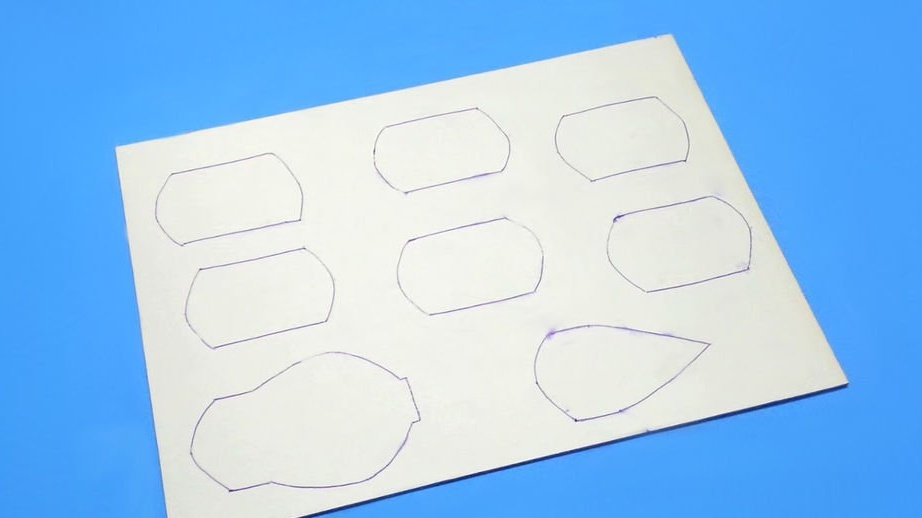
Extractes d’un full:

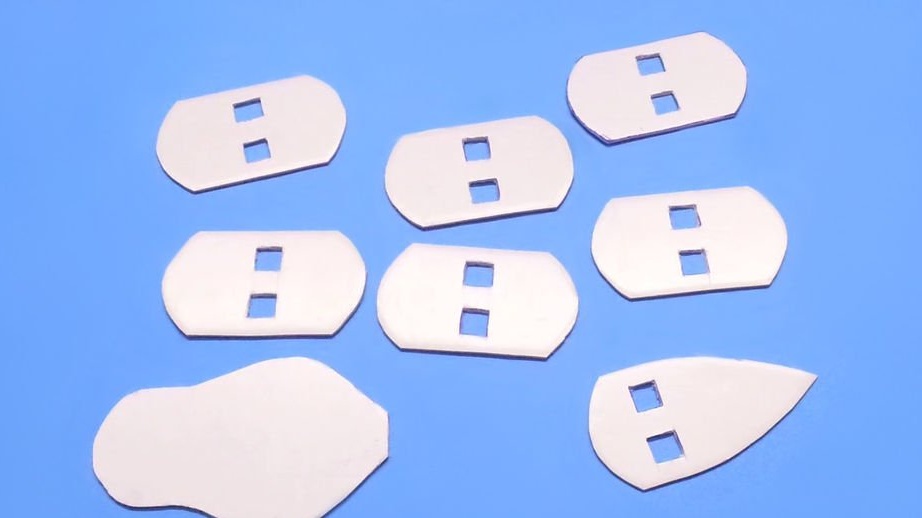
Fa forats quadrats per als corrons:
Què fa de comptes i clips de paper, salutacions "DU Vasily Biletsky":
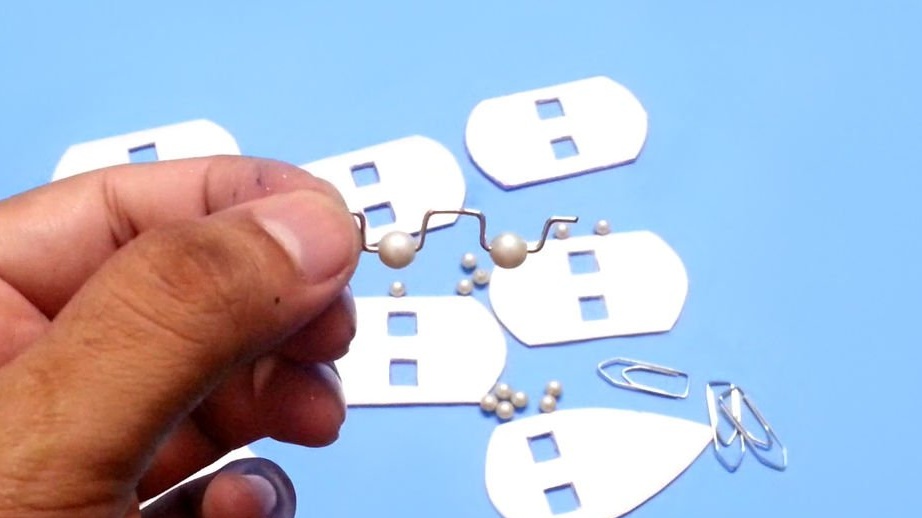
Fixa l’eix dels rodets amb una pistola de cola, assegura que els propis corrons no estiguin encallats amb cola. Foraç per a enllaços:
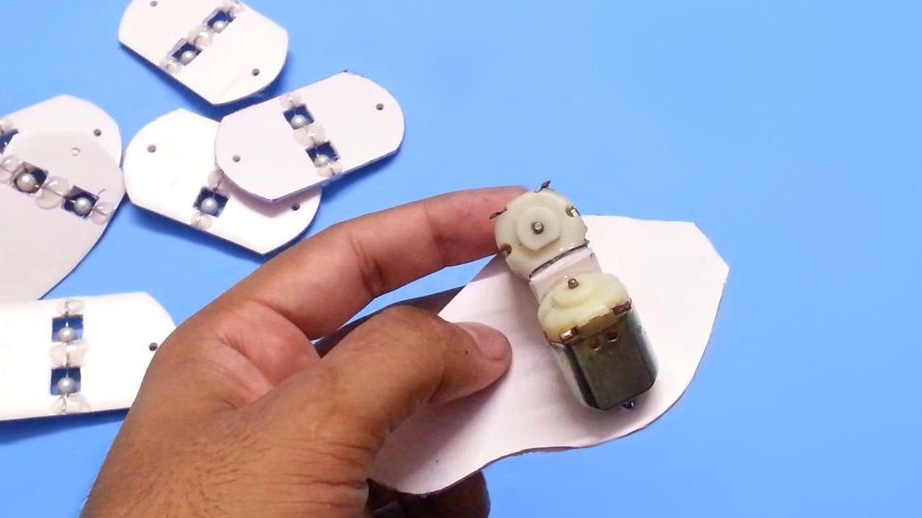
Adhereix un suport triangular per a motors de corrent continu:

Aplica motors, notes on foradar forats per eixos, broques, eixos roscats, motors per enganxar:
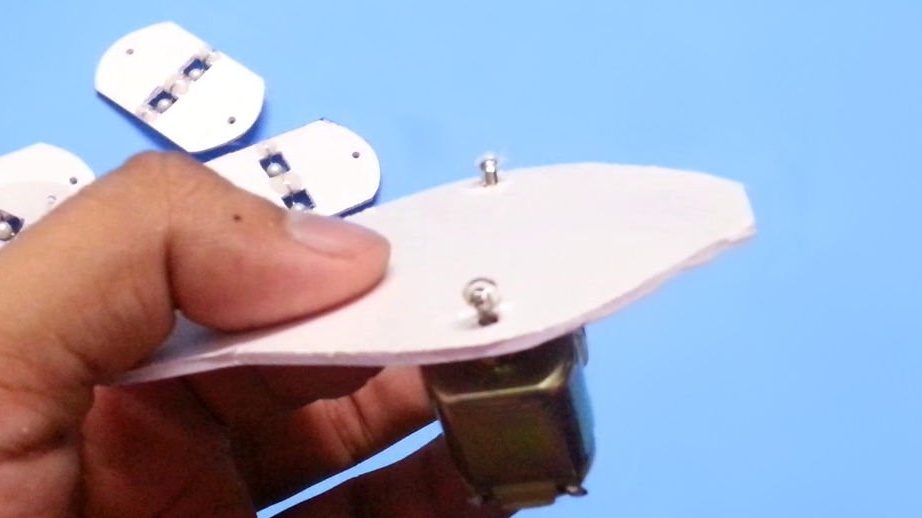
Als eixos dels motors es fa boles adhesives de fusió calenta:
Connecta enllaços amb ... cable i botons:
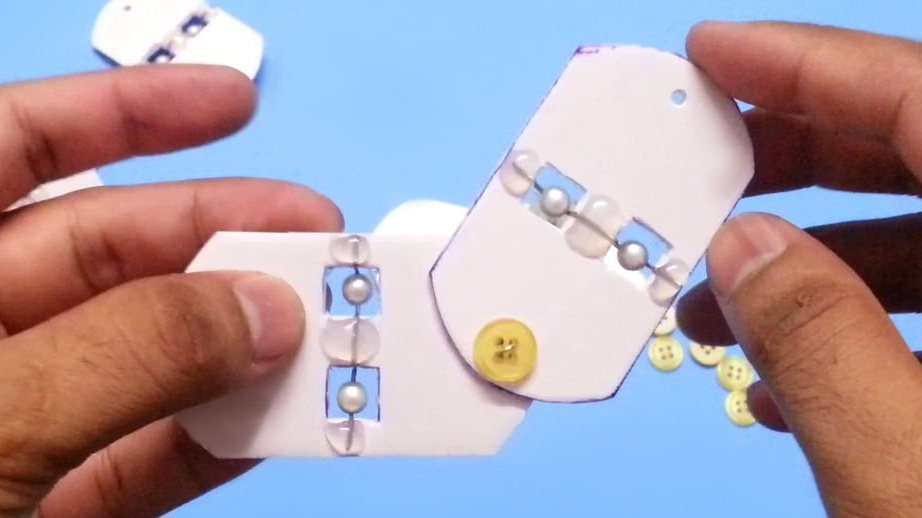
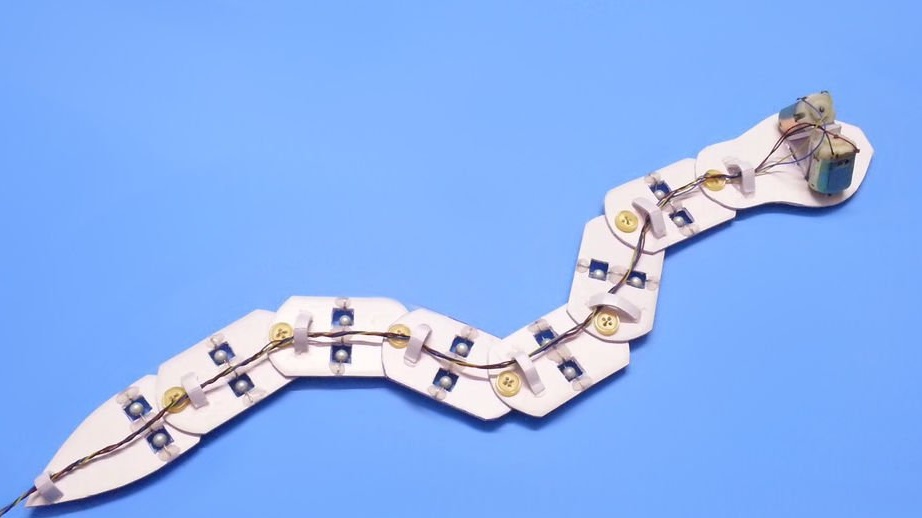
La serp robòtica està reunida, però continua immòbil:

Tall de tires de cartró, agafa un cable de quatre fils, solda dos fils a cadascun dels motors i es fixa amb la primera tira:

I la resta:
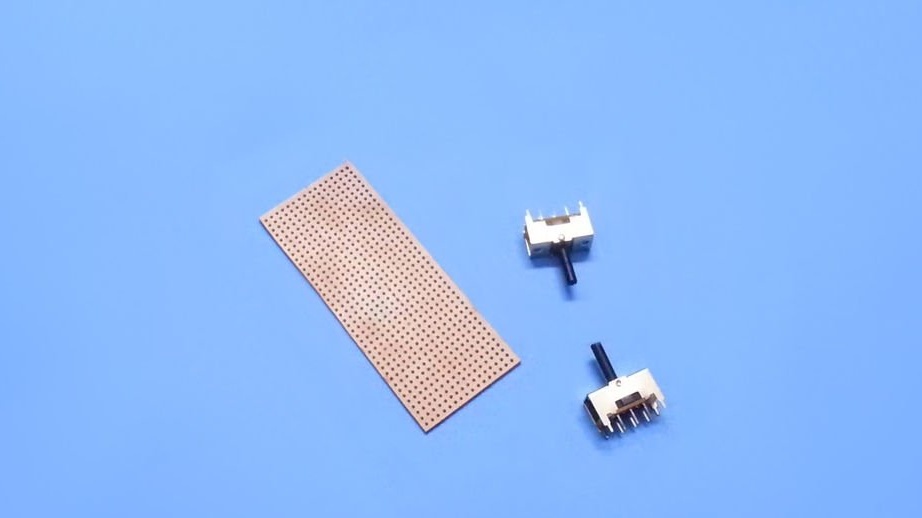
Porta dos interruptors a tres posicions (de mig a fora) i dues direccions, així com una peça de panell de taula de perfboard:
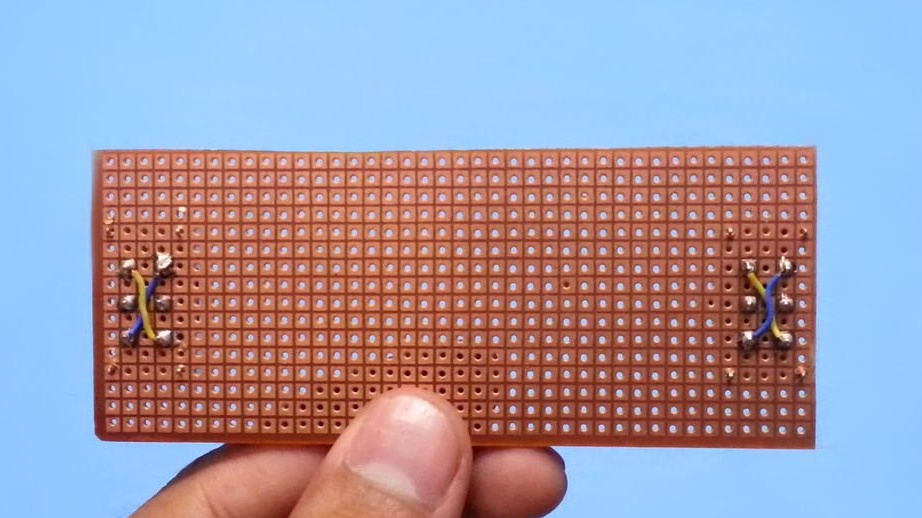
Utilitzant saltadors, converteix els dos interruptors en inversibles:
Fa molles per a la bateria 18650 a partir de clips de paper, la posa. No ho facis! Agafeu el compartiment acabat. Utilitzeu la bateria només amb protecció. Millor encara, un compartiment per a 2 peces. AA o AAA amb cèl·lules o bateries adequades.
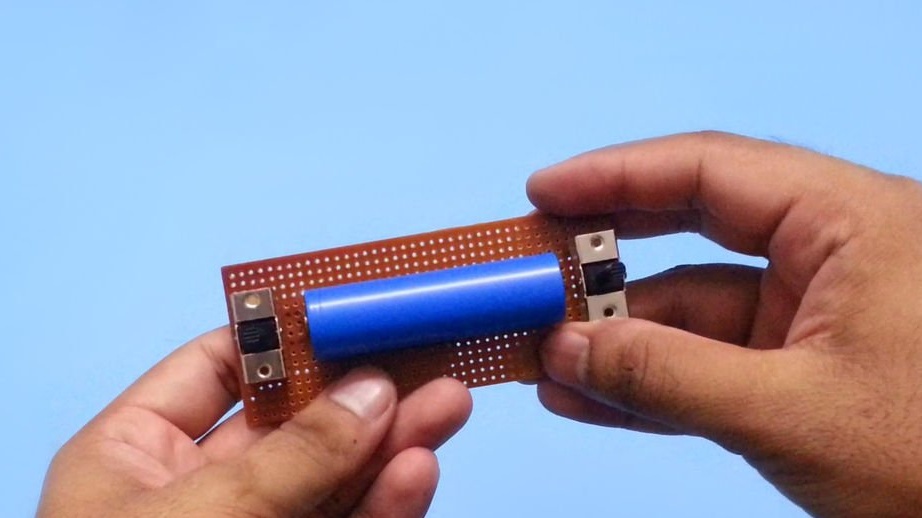
Les grapes longitudinals contribueixen a mantenir la bateria al seu lloc:
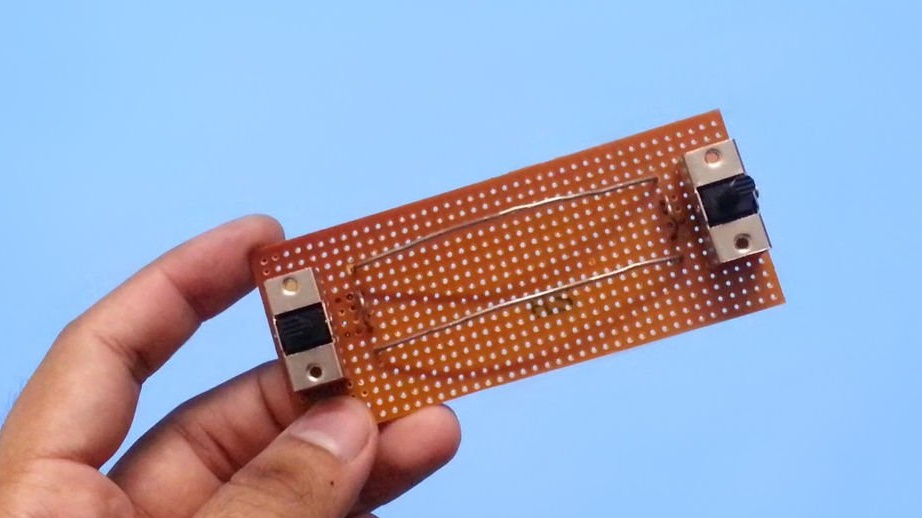
Així, mentre que la part posterior de la placa de control remot es veu:
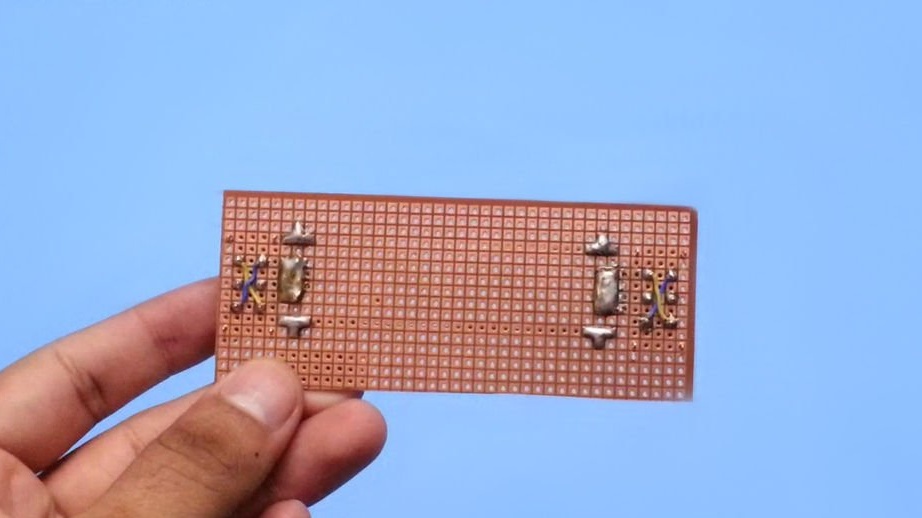
El mestre connecta el cable de la robosnake, fa connexions segons l’esquema:

Ara el costat inclinat de la placa de control remot té un aspecte diferent. El cable es fixa amb adhesiu de fusió calenta, és important que hi hagi una capa aïllant d’aquest adhesiu entre ell i la placa de pa. Ara, aquest costat de la junta ha de cobrir-se amb un dielèctric, ja que els impulsos d’auto-inducció es produeixen quan s’apaguen els motors.
Tot això s'ha fet:

A causa de les característiques de disseny del robosnake, amb les mateixes posicions de commutador, els motors han de girar en sentit contrari. Si no és així, cal revertir-ne un. Després d'això, seleccioneu experimentalment la posició del comandament a distància, en la qual la posició d'avantatge dels dos interruptors correspon al moviment cap endavant. Els motors es poden aturar i revertir per separat, obligant la robosnake a realitzar diversos trucs.