

Els bobinats de guitarra són diferents. Guanya menys voltes: la distorsió és petita, però pot ser necessari un preamplificador. Vent més: l'amplitud augmentarà tant que es pot prescindir d'un preamplificador, però augmentarà la distorsió. Trieu una recollida depenent de quina peça de guitarra elèctrica vulgueu realitzar. I per instruir l’automatització als enrotllaments de recollida casolans, que va ser inventat per l’autor d’Instructables amb el sobrenom de TheBigSuleskey.
El dispositiu està dissenyat per utilitzar fotogrames preparats, però es pot tornar a treballar per a qualsevol altre, inclosos els impresos en 3D. El fil bobinat s’enrotlla amb una bobina fixada a la taula, passa a través d’un anell i una guia vertical amb diversos forats, després s’enrotlla al voltant d’un marc giratori:

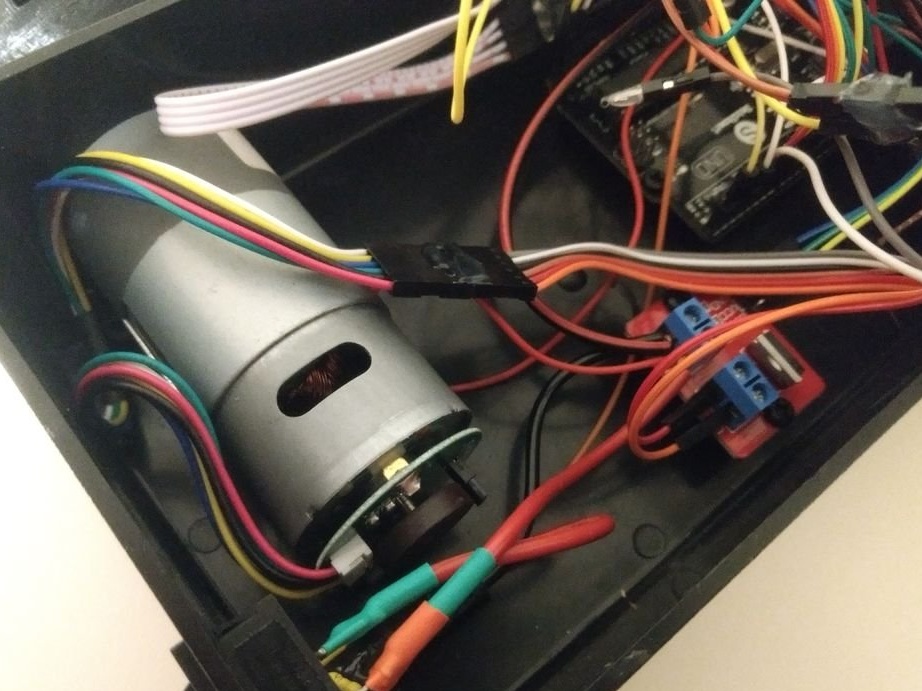
El bobinat està muntat en una caixa de PVC amb unes dimensions de 200x120x65 mm amb potes de goma, el component més voluminós del dispositiu és un motor de 12 volts de corrent continu amb un sensor de posició YC-52010. Es controla a través del conductor d’alimentació des de la placa Arduino No compatible o compatible. S'introdueix informació des de quatre botons i una resistència variable de 10 quilograms ohm, i es dóna a una pantalla de 16x2 amb una interfície de sèrie. El diagrama mostra un mòdul per convertir una pantalla convencional del HD44780 en un serial. També és possible canviar per Bluetooth mitjançant el mòdul HC06, però és una opció addicional.
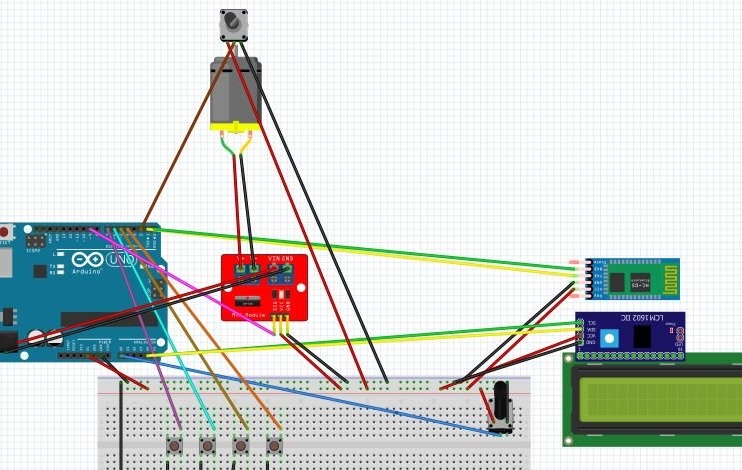
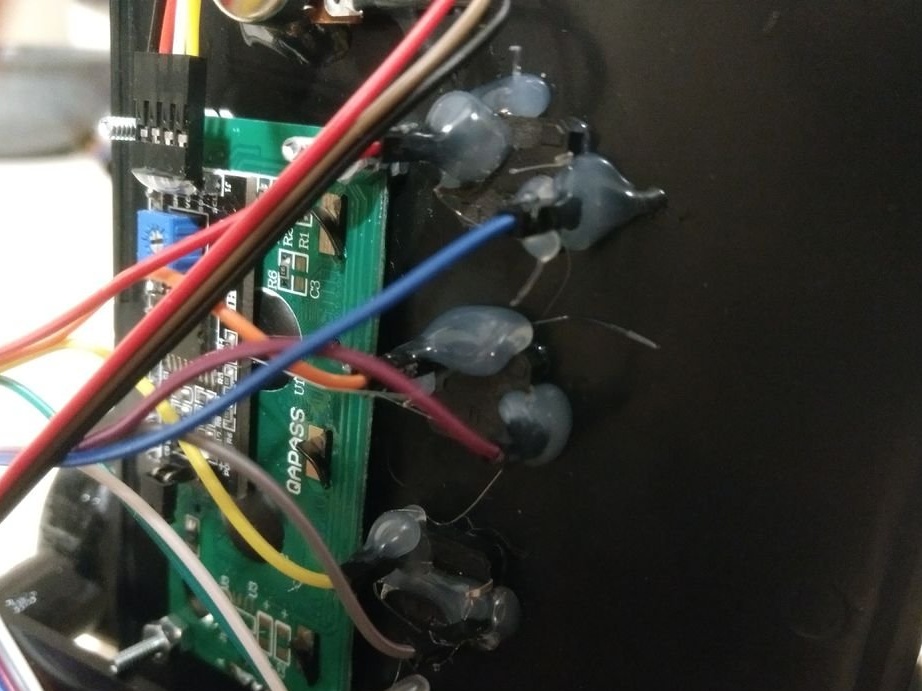
Els botons, en prémer-los, tiren les entrades digitals Arduino al cable comú, estaria bé treure les mateixes conclusions amb les resistències més, això millorarà la immunitat del soroll, però TheBigSuleskey no. La resistència variable es connecta al fil més i al cable comú amb els terminals laterals i a l’entrada analògica 0 com a la central, de manera que el voltatge d’aquesta entrada canvia de 0 a 5 V en relació amb el fil comú.
Tot s’alimenta a partir d’una font d’alimentació de 12 V d’una netbook (els portàtils no funcionen, normalment hi ha 19 V). Com que avui en dia les netbooks no són gaire habituals, és adequada una font d’alimentació per a una tira LED, de manera que també pot donar uns 4 A.Pot ser que un encaminador no sigui adequat, de 1 a 2 A allà, el motor pot funcionar lentament des del descens de tensió. Arduino i el conductor del motor estan paral·lelitzats (no oblideu la polaritat), mentre que tots els components de la placa Arduino són alimentats per una tensió de 5 V mitjançant un estabilitzador instal·lat allà. Algunes plaques base compatibles modernes no disposen d’un estabilitzador, llavors cal connectar la placa mitjançant un estabilitzador lineal del xip 7805 o una placa estabilitzadora d’impulsos (generalment al xip MC34063A) de la càrrega a l’encenedor. Independentment de l'establiment, directament a l'Arduino o per separat, s'utilitza el mòdul Bluetooth, la pantalla, el sensor de posició i el convertidor d'interfície de sèrie a paral·lel.
El mestre va soldar un endoll al cable de sortida de la unitat d'alimentació que suporta el corrent consumit per tot el circuit, i va instal·lar una presa adequada per a aquest cas. El conductor i Arduino es van connectar mitjançant un interruptor. La presa i el commutador també han de suportar aquest corrent.
A Arduino, ha penjat això, no és compatible amb Bluetooth. Si en necessiteu, haureu de fer els canvis necessaris. I si no només no es necessita el Bluetooth, sinó que no es planifica, es pot ometre el mòdul corresponent. Si el motor gira en el sentit equivocat, s’ha de revertir, si el controlador de velocitat funciona en el sentit contrari, s’han de capgirar els terminals invertits de la resistència variable. Després d'haver provat a la placa oberta com funciona tot plegat, TheBigSuleskey ho va eliminar i va connectar tot segons el mateix esquema, però mitjançant la soldadura.
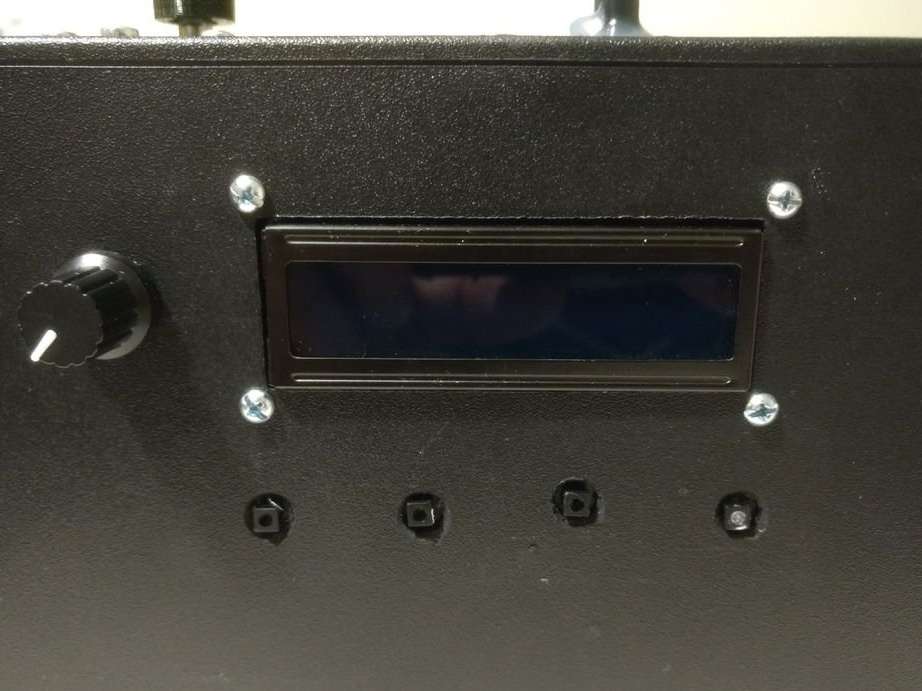
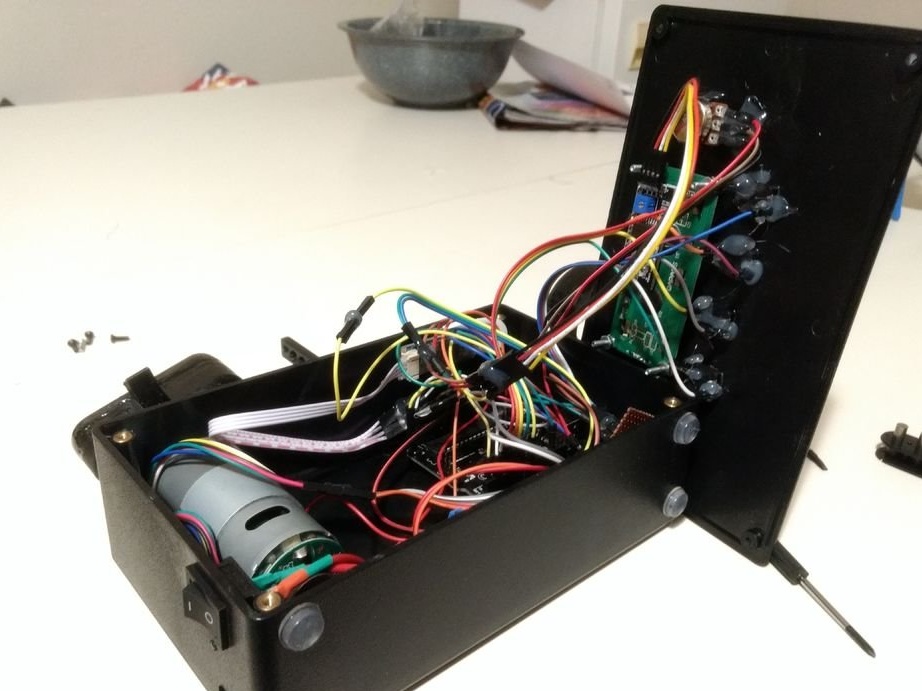
En el cas, el mestre va fer forats per als botons, interruptor, soca, eix del motor, resistència variable, etc. Va utilitzar una eina manual per a això, ja que el tallador làser no és adequat per a això, sinó només amb una caputxa molt potent: el PVC emet més fum que altres plàstics. Enganxant la presa d'alimentació amb epoxi, es va assegurar que no entrés. I la presa USB d’Arduino estava una mica arxivada. Calen potes de goma, sense que el cos vagi a l’atzar al voltant de la taula. Aquí, el disseny acabat es mostra des de diferents costats amb peces impreses en 3D ja instal·lades, més sobre això posteriorment.


Elements del circuit amb dificultat, però han entrat en el cas:

Podeu portar qualsevol plàstic per a la impressió 3D. El farcit és petit, però les parets són més gruixudes, de manera que hi ha un marge per a la rectificació manual posterior. Traieu els salts de les peces impreses.
No es mostren fitxers per imprimir l'anell i la guia amb forats. El broquet de l’eix del motor consta de tres parts:, i. En ajuntar-los, el mestre es va assegurar que la part inferior s'enganxés a la part superior, però no es posés a la cola en moviment. Abans d’això, va col·locar bolígrafs als forats corresponents a la part inferior de la molla, i imants als baixos del mòbil. A la boquilla acabada, va escalfar lleugerament el forat de l’eix del motor amb un assecador per tal que el plàstic es suavitzés, posés tota l’estructura a l’eix i deixés que es refredés. Després d'això, el dispositiu està a punt per a la seva inspecció i ús.