
Avui farem un autèntic joc amb una pilota i un laberint. L’autor d’aquest producte casolà és AlexGyver.

Molts de vosaltres probablement coneixeu jocs amb aquest estil. Tenim una bola al laberint, hem de portar la bola a la sortida del laberint. Els forats dificulten la caiguda de la pilota i heu de començar tot de nou. Aquests jocs van aparèixer als primers telèfons intel·ligents amb pantalla de color normal i acceleròmetre incorporat i eren molt populars en aquell moment.

Per tant, per què no fer tal cosa a la vida real, és a dir, material i potser fins i tot controlar-la, per exemple, de forma remota. Provem-ho.
La plataforma amb el laberint es muntarà en dues frontisses per inclinar estrictament al llarg de 2 eixos. Al principi, l’autor volia fer una frontissa esfèrica, però això comporta molts altres problemes. Primer, anem a fer una mini versió per depurar el programa. Per fer-ho, agafeu un tros quadrat de contraplacat: serà una taula.

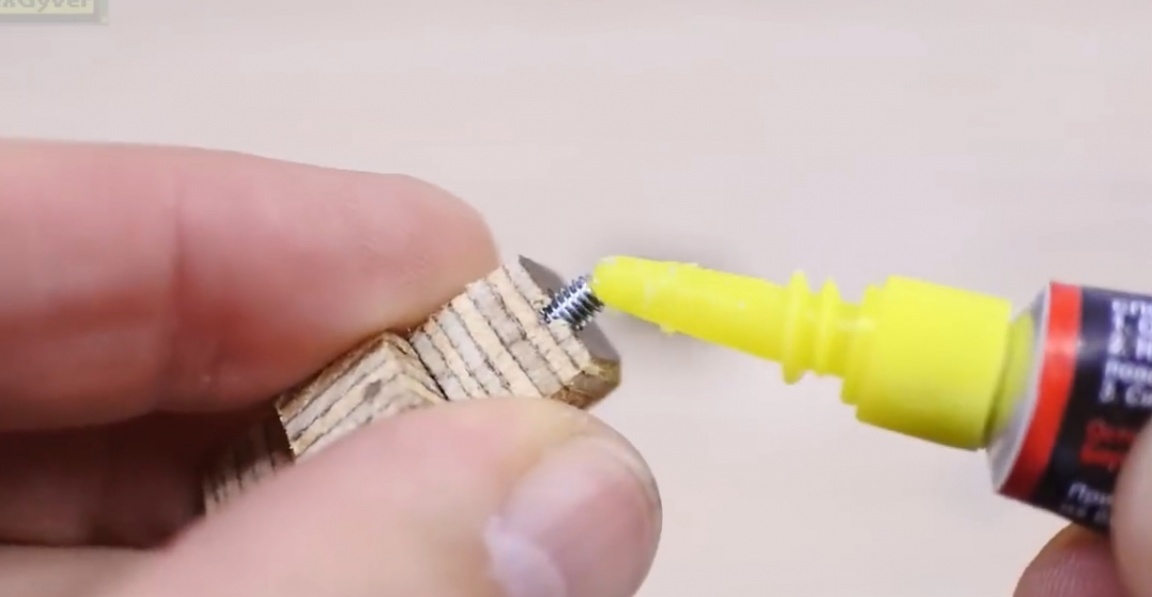
Les parets del laberint es poden fer de cartró, cola-la sobre cola calenta. Per crear una frontissa, necessiteu un parell de cargols i alguna cosa en què pugueu arreglar-los. L’autor va utilitzar per a aquesta ferralla de contraplacat més gruixut.

La bola és així, d'acer de 15 mm.

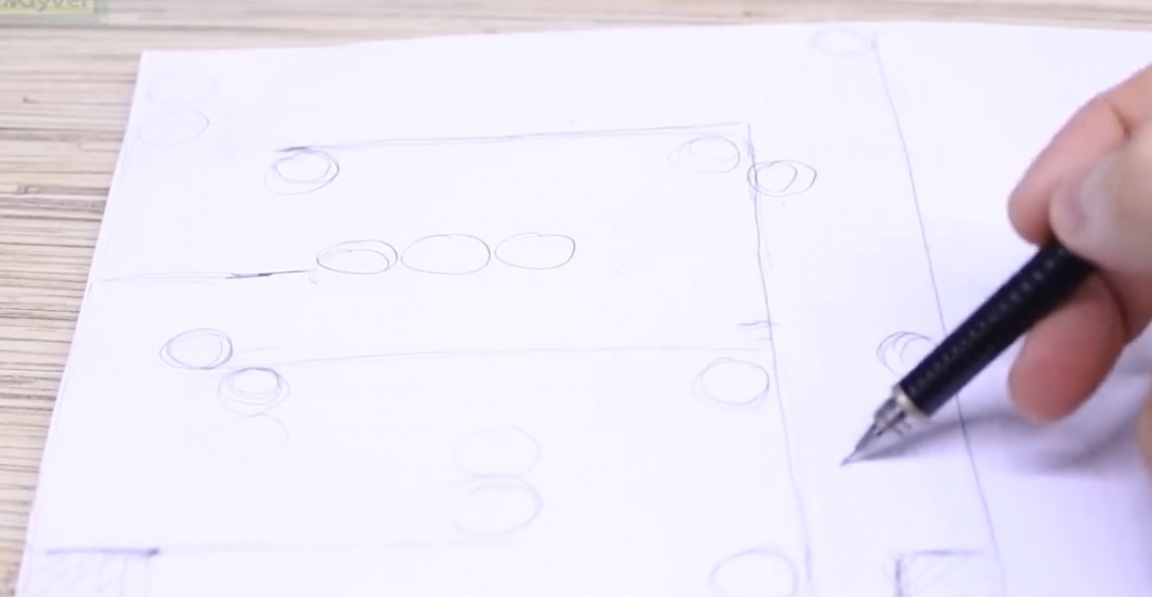
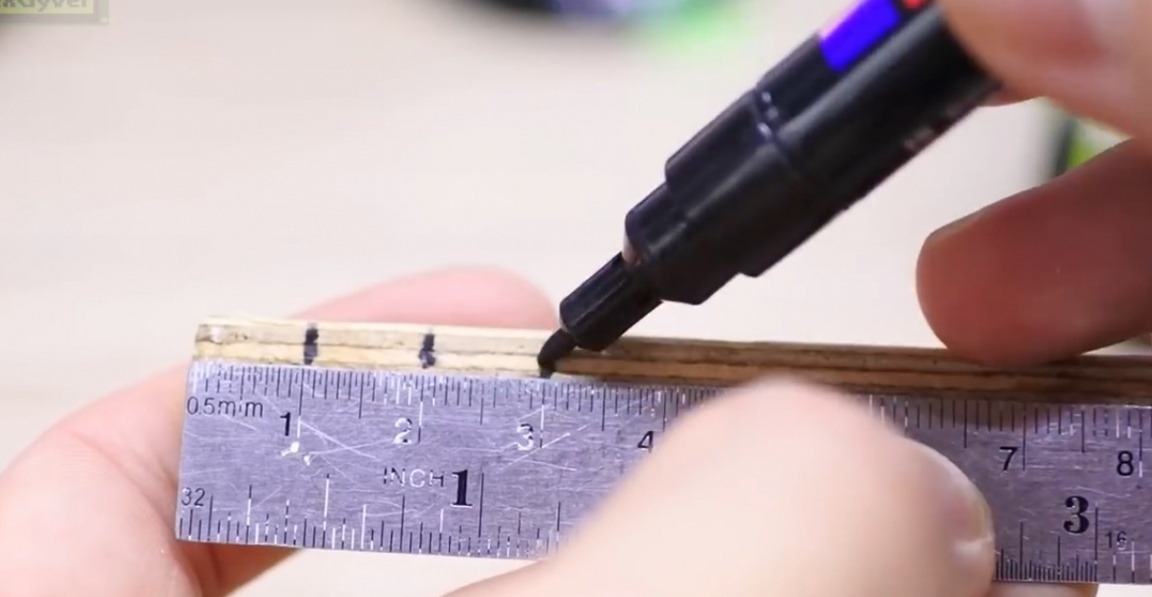
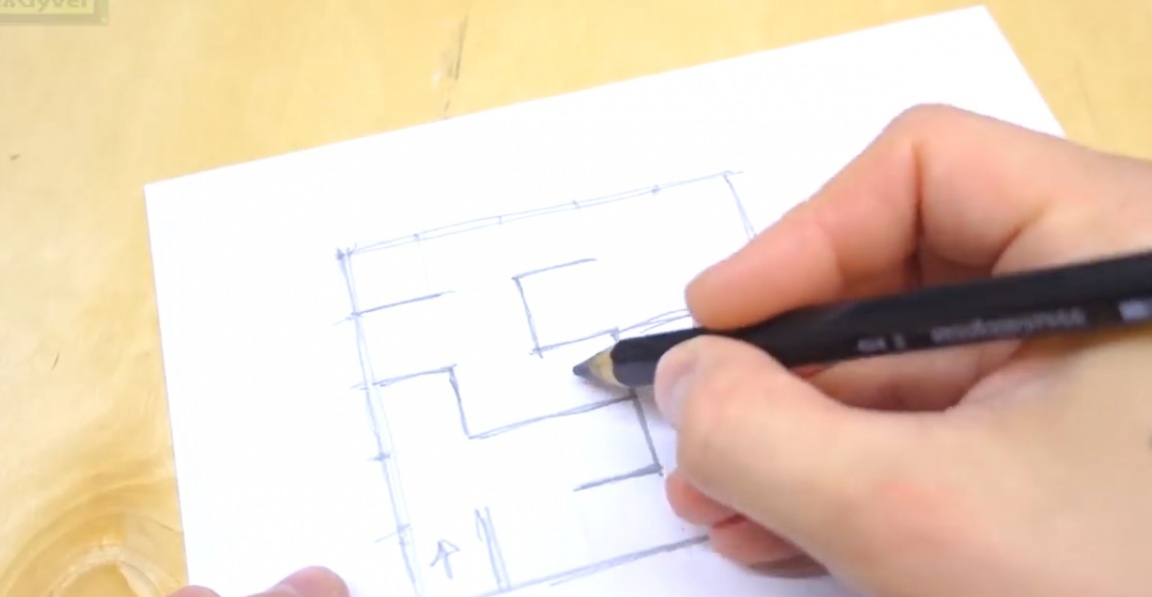
A continuació, heu de dibuixar el propi laberint.
Aleshores estan construint el laberint. Vaig haver de canviar una mica.


Bé, comencem a perforar. Després continuem perforant amb un trepant xinès.



A continuació acabem el laberint.

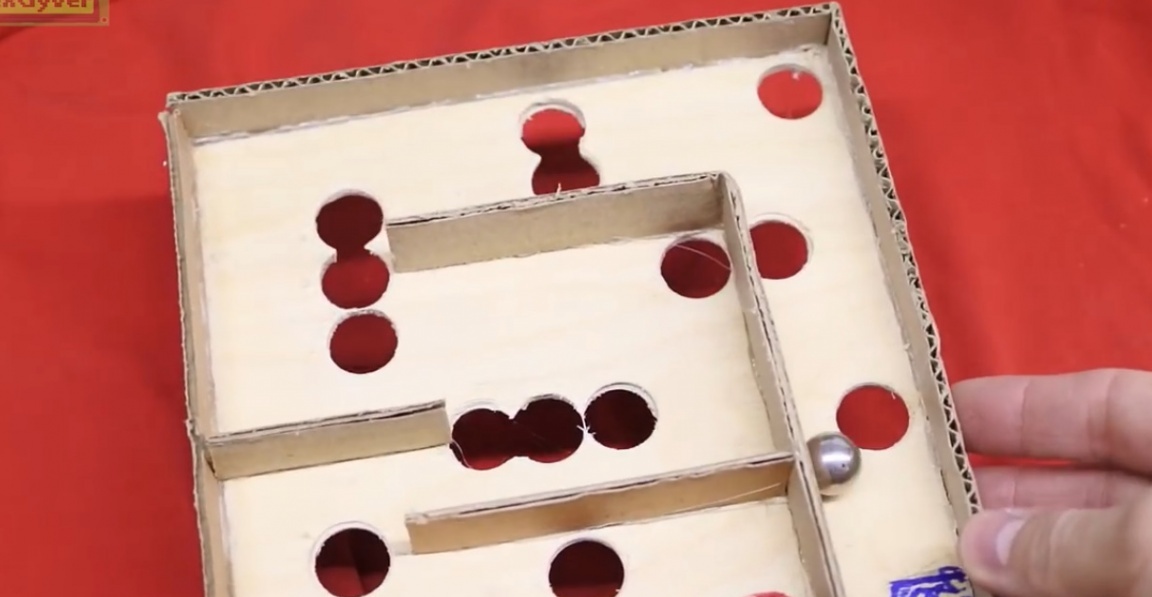
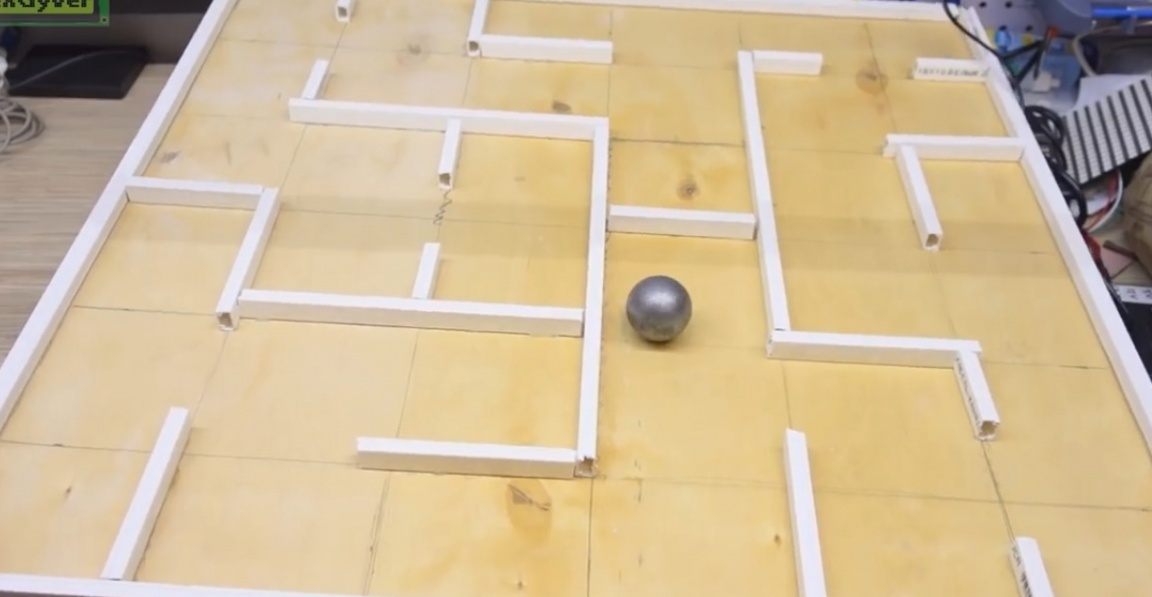
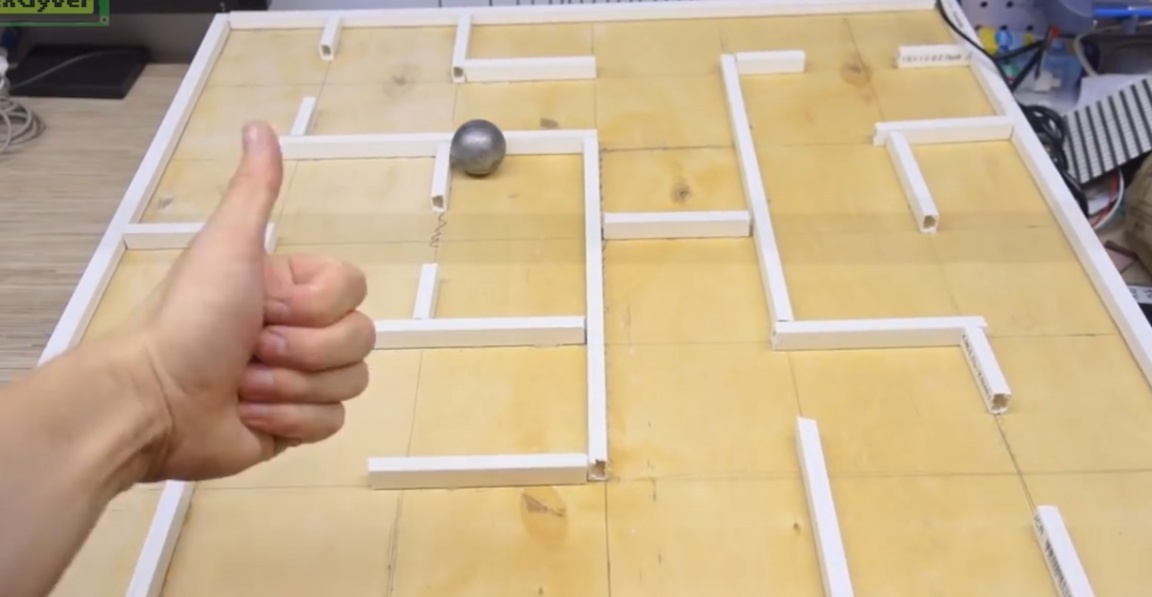
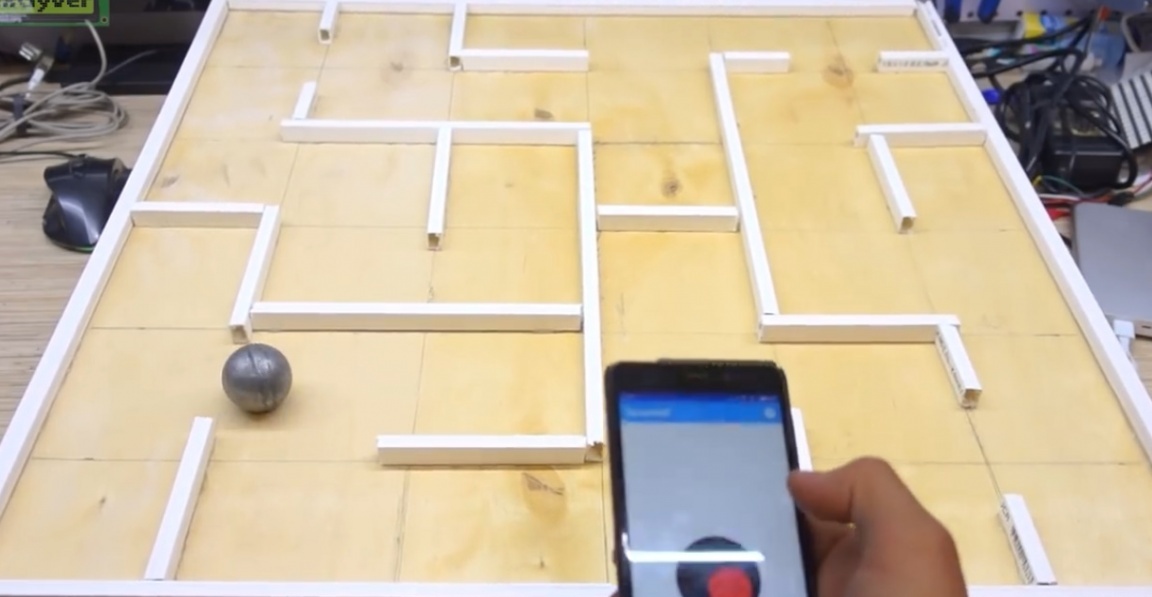
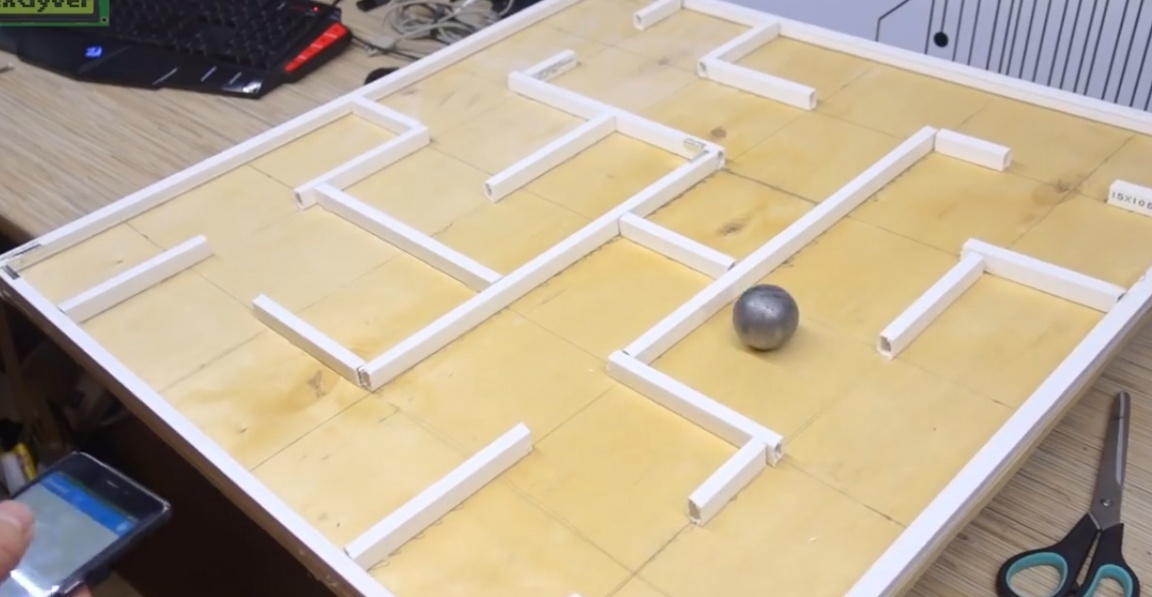
Aquí hi ha un laberint amb una bola en execució material.
Doncs intentem passar pel nostre laberint resultant, per dir-ho en mode manual. No és tan senzill.
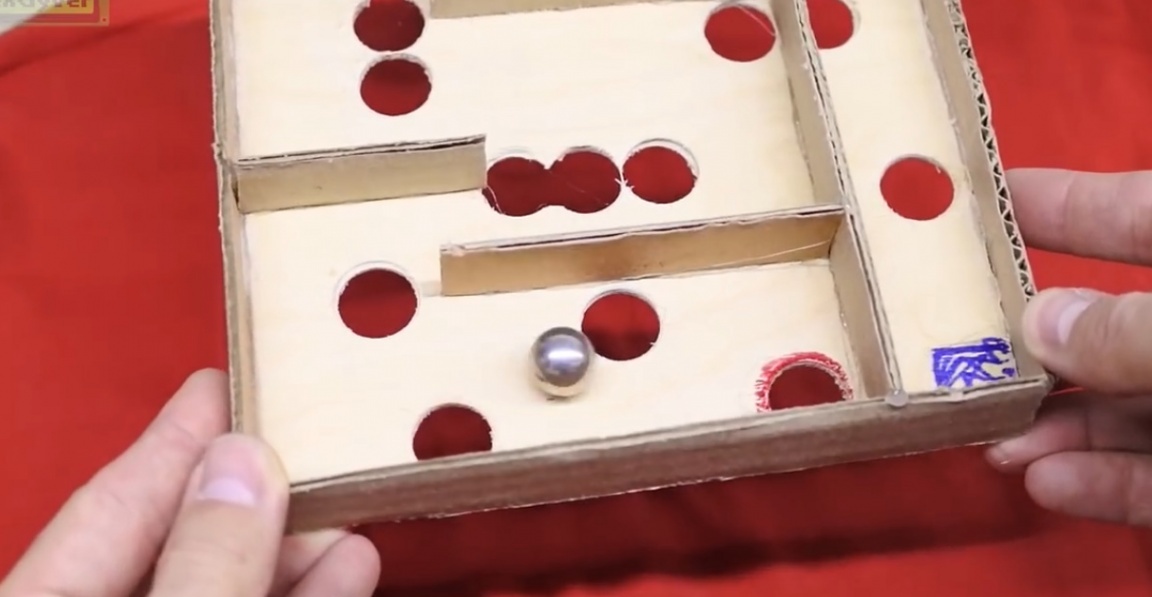
L’autor va fer deliberadament forats que són trampes. Es mantenen directament en el camí de la pilota. També va fer deliberadament un mapa complex amb antelació per reproduir-lo durant molts anys. Bé, sembla estar bé.
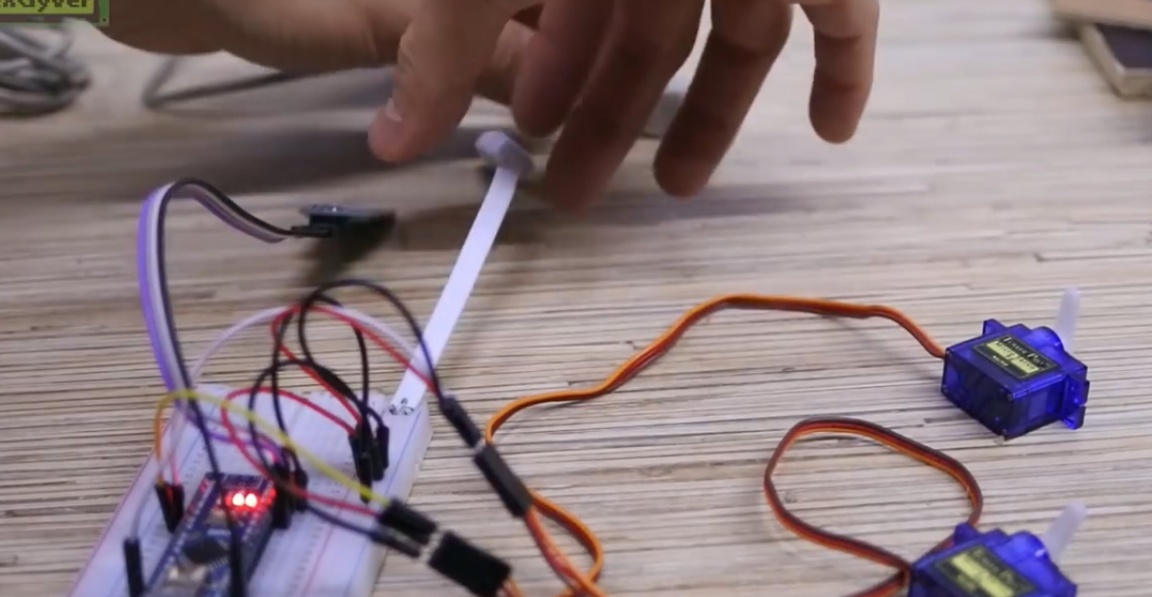
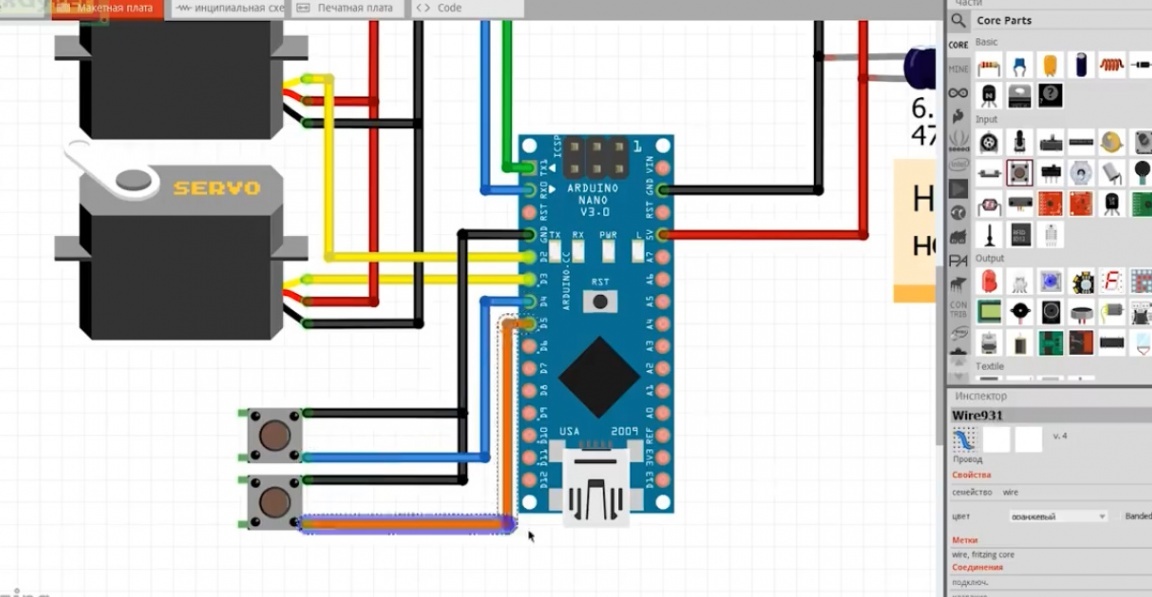
I ara toca recollir electrònica. La taula es mourà mitjançant 2 servos, que seran controlats per la plataforma Arduino i des d’un telèfon intel·ligent via bluetooth. El sistema és molt senzill:
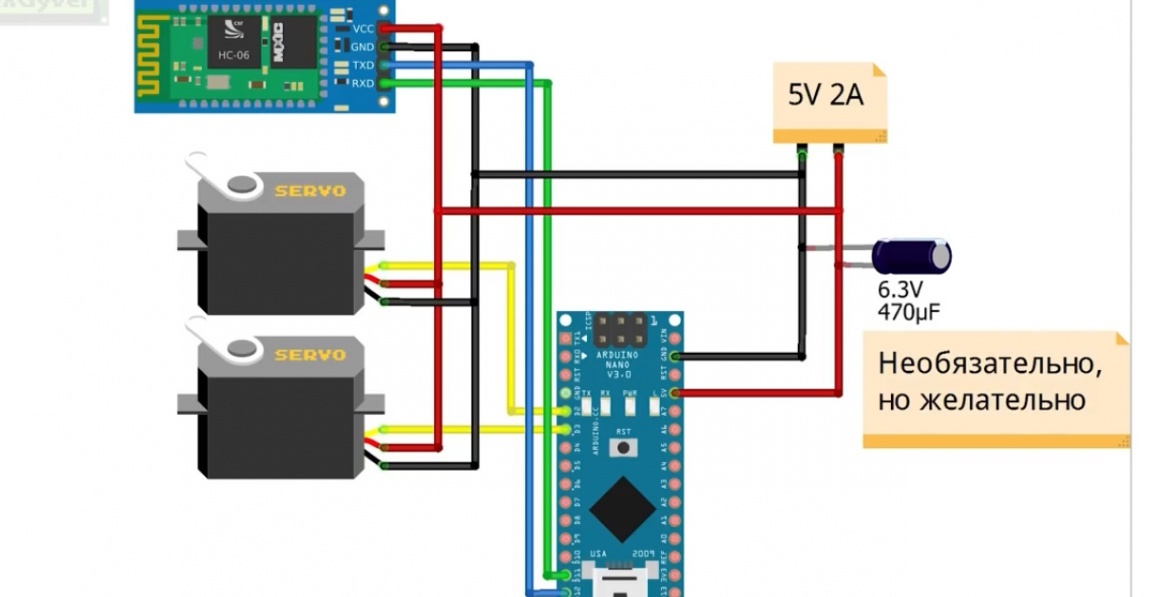
La potència del servo ha de ser prou separada i prou potenta, n'hi ha prou amb un carregador USB per a 2A o un banc d'alimentació. Podeu trobar enllaços a tots els components electrònics a la pàgina. PROJECTE.
Allà podeu descarregar l'arxiu amb el projecte, que inclou tots els esquemes i el firmware. Totes les instruccions també es troben a la pàgina del projecte. No et preocupis, no hi ha res complicat.
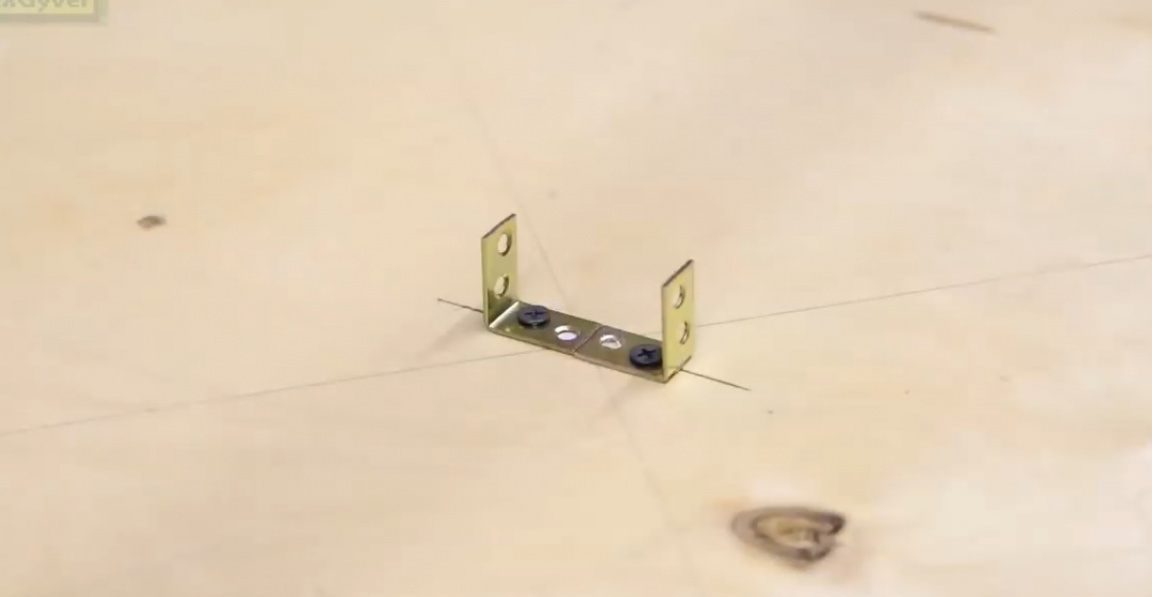
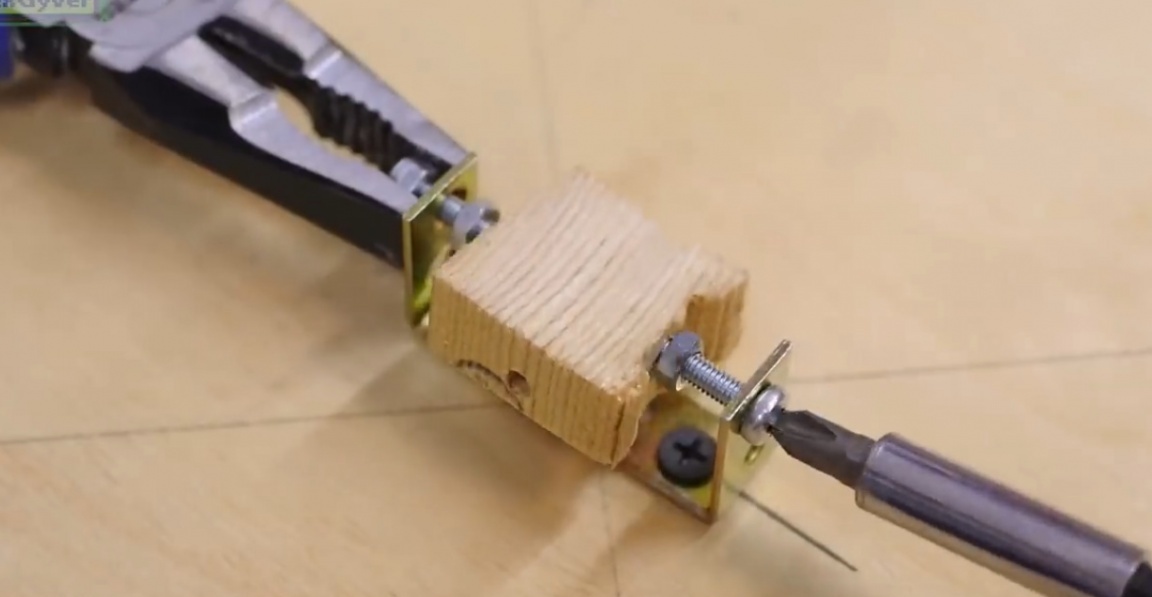
Per començar, tallem i foradem cubs per muntar les frontisses.

Després recollim. El cub amb dos forats és central, els dos eixos queden fixats al mateix. Ara, fixem la caixa de la frontissa amb cola calenta.


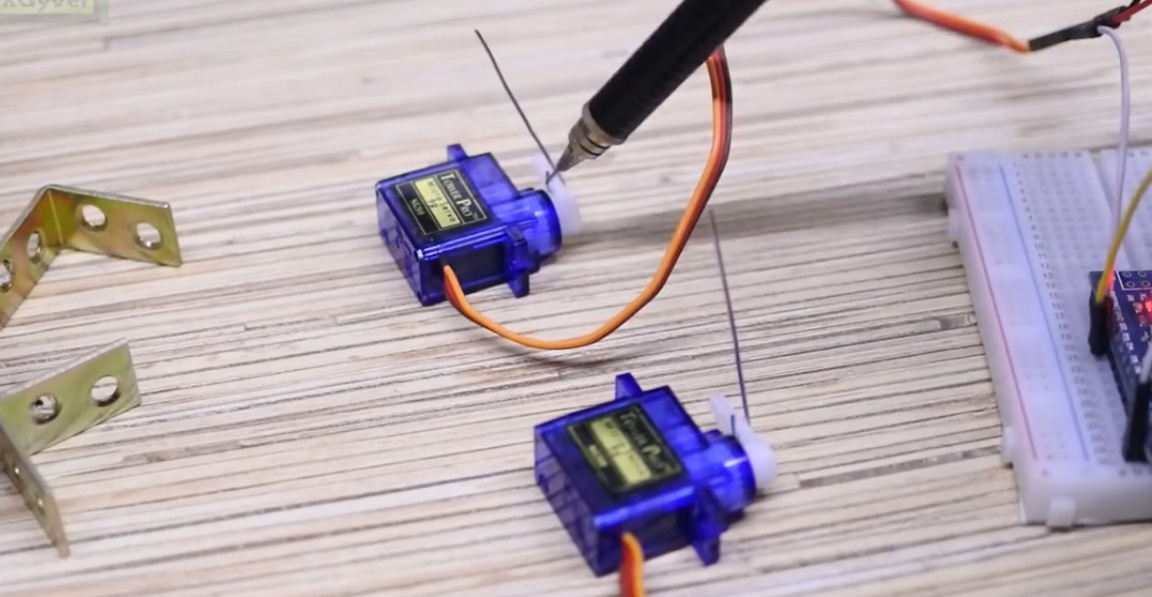
I des de baix, la frontissa es munta sobre una petita peça de contraplacat, serà més convenient. Després de descarregar el firmware correctament i subministrar energia, els servos es giraran a l’angle mitjà, en aquesta posició haureu de fixar el balancí, és a dir, exactament al centre.

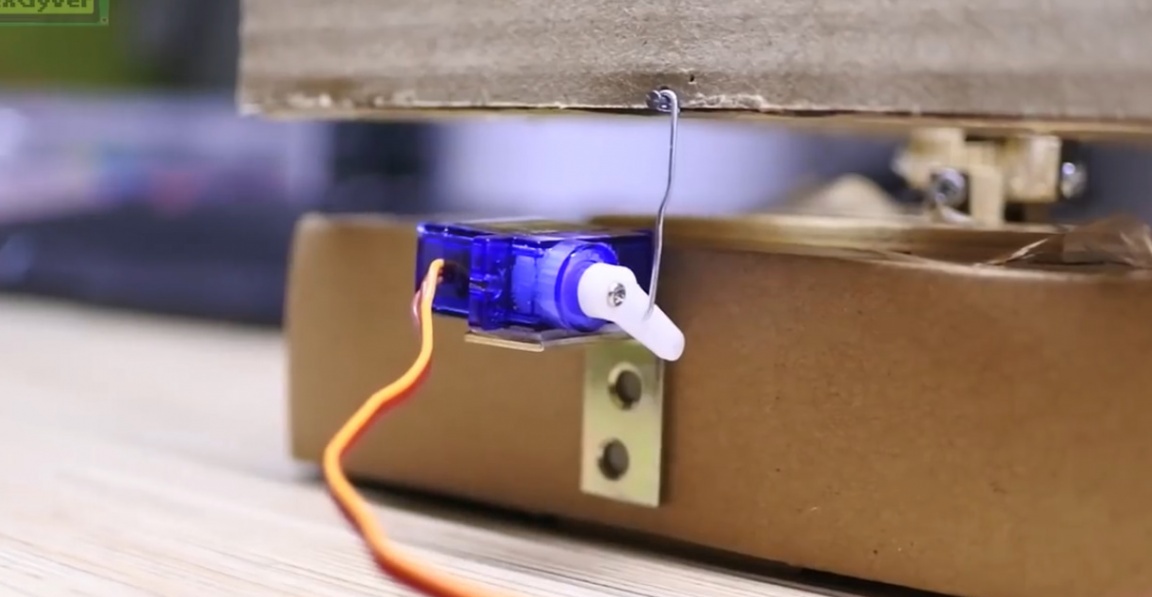
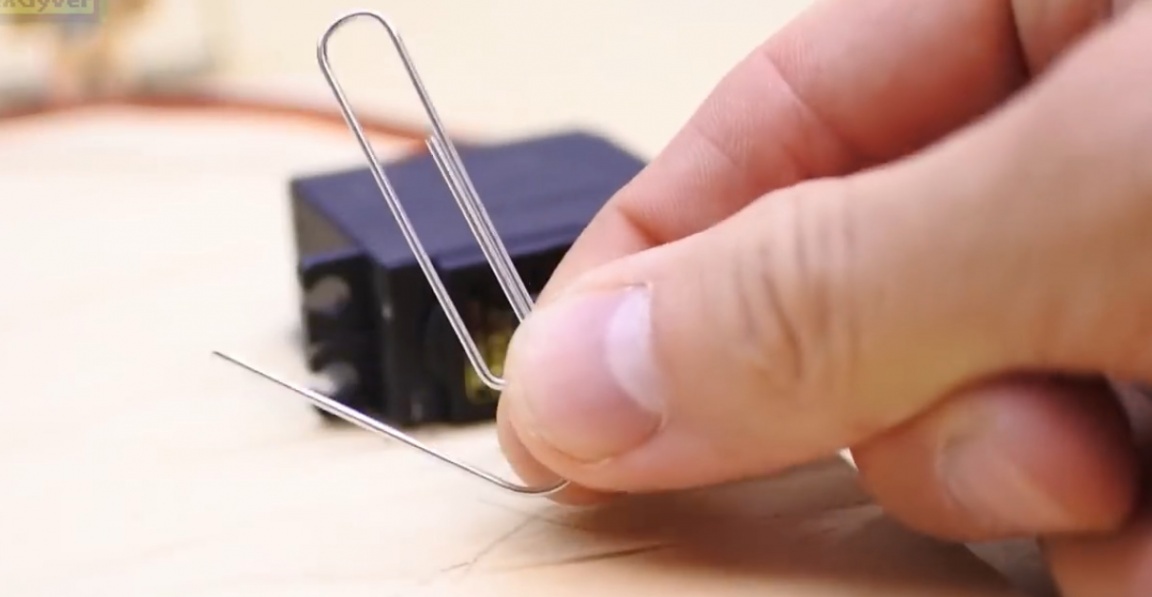
El nostre disseny es situarà sobre una caixa de cartró. A les cares de dues cares fixem els servos amb l’ajuda de les cantonades. El moviment es transmetrà mitjançant un clip de paper, a partir del qual farem les bigues de connexió.
Fixeu-vos en la ubicació del filferro i la direcció del balancí i de la biela, això és molt important! És en aquesta posició que els discos es montaran a la caixa.
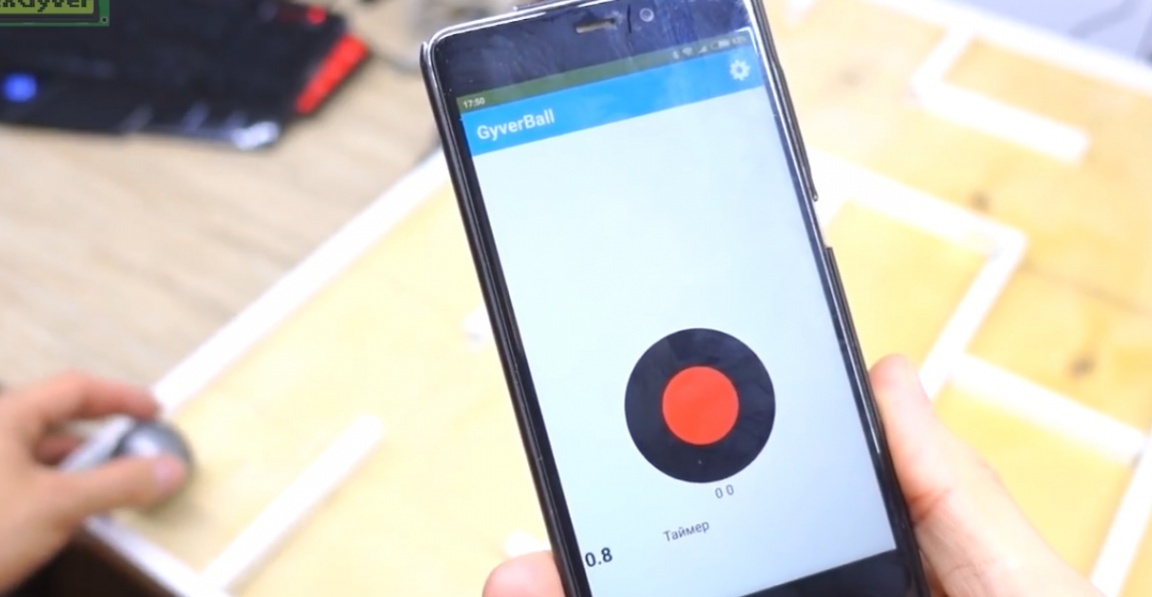
El deixem de l’arxiu amb el projecte al nostre telèfon intel·ligent i instal·lem l’aplicació GyverBall.
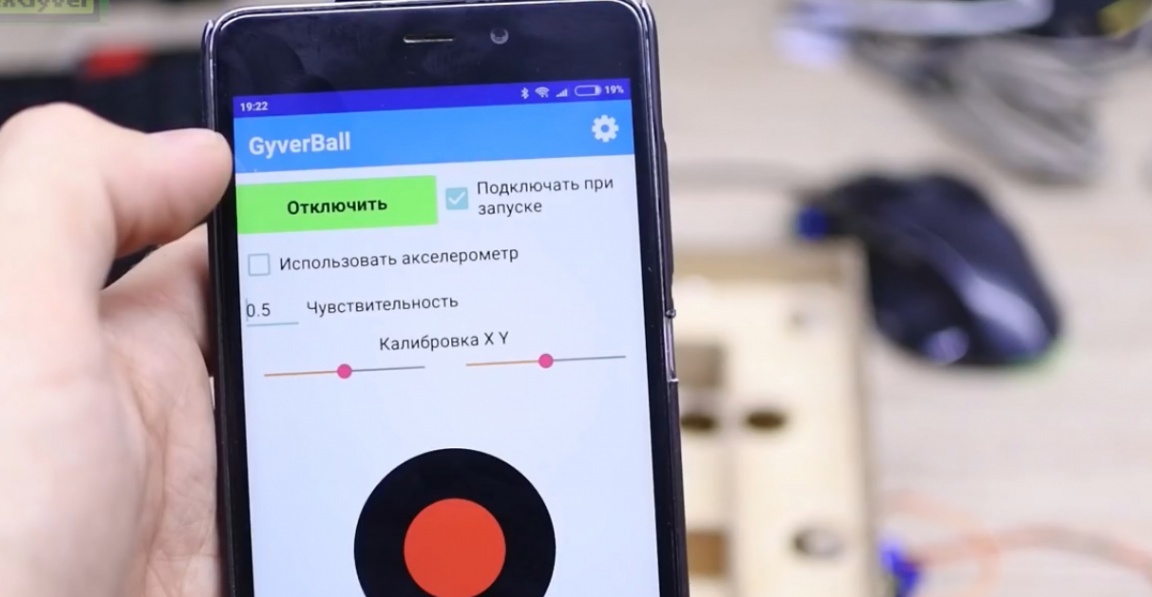
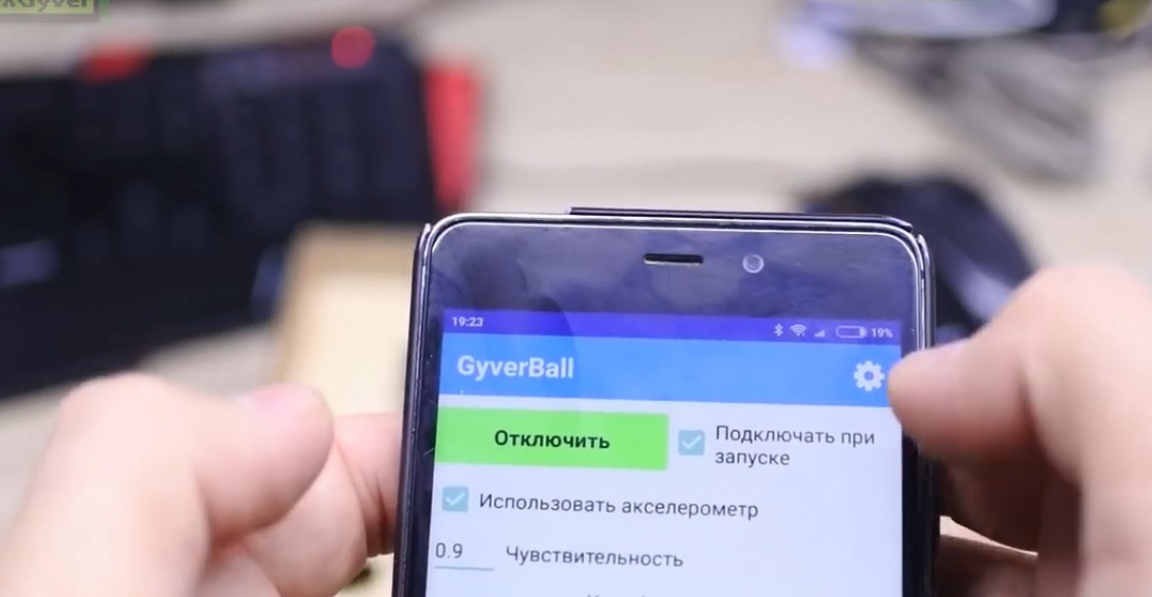
Prefigurem el maridatge amb el mòdul Bluetooth, la contrasenya és 1234 i anem a la configuració de l’aplicació. Estem connectats. Fet Ja podeu controlar la taula de laberint. Aquí podeu ajustar la sensibilitat i calibrar la taula horitzontalment de manera que la bola no rodoli enlloc en la posició zero.
Però el més fresc és, per descomptat, l’acceleròmetre. Comprovem i aconseguim aquell mateix joc amb un laberint amb el mateix control, però amb una física absolutament real.


És molt difícil de jugar, perquè el disseny va resultar molt tremolós i es comporta una mica imprevisiblement. A més, la taula està tremolant constantment. Al principi semblava que aquest soroll era un acceleròmetre, però va resultar que no ho era. El problema era molt inesperat. L’autor va connectar el mòdul Bluetooth mitjançant la biblioteca SoftSerial per poder depurar el programa a través del monitor de port a l’ordinador. Però va resultar que l'ús d'aquesta biblioteca interfereix amb el funcionament del servo. Recordeu-ho si esteu fent un projecte amb Bluetooth i servos. Però això no va impedir que l’autor passés pel laberint. En general, el bluetooth s’havia de connectar directament així:
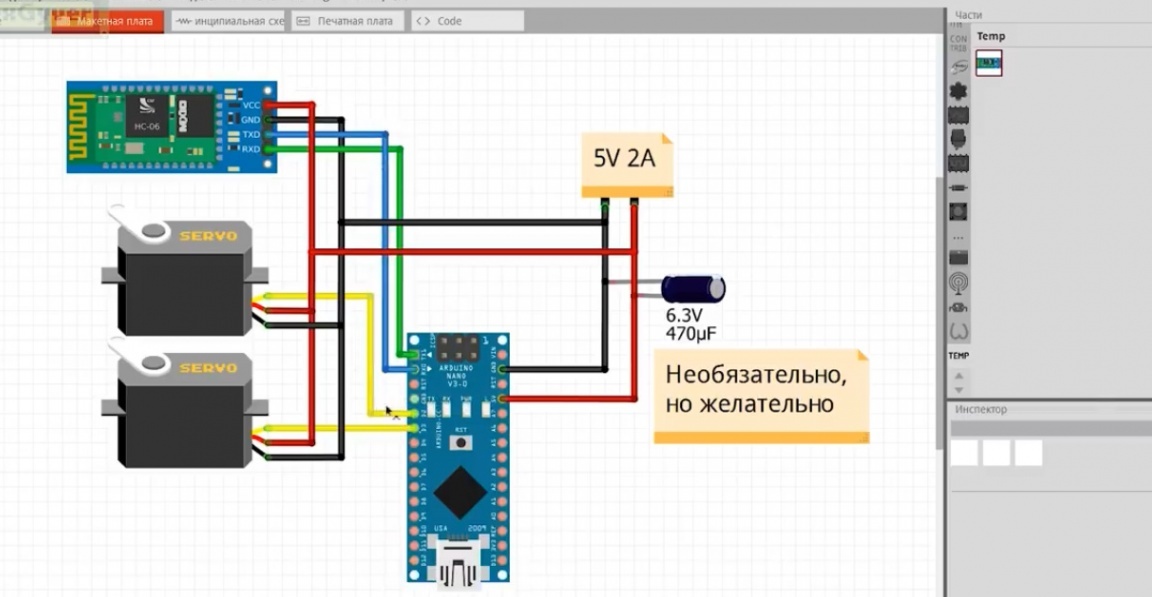
I tot va començar a funcionar perfectament, tot és absolutament estable i res no tremola en repòs. Abans d'actuar arduino, heu de desactivar el Pin lògic amb el bluetooth, ja que el mòdul interferirà amb el firmware.
Doncs bé, ara anem a fer la versió més gran. Per fer-ho, necessitem un gran full de contraplacat i grans servidors potents.


Es tracta de xinesos mg995 xinesos, barats, però molt forts. Aquesta vegada les boles seran més grans.
La bola dreta és buida, però la massa és la mateixa que l'esquerra. Per la mida, l’autor n’ha escollit un de gran.

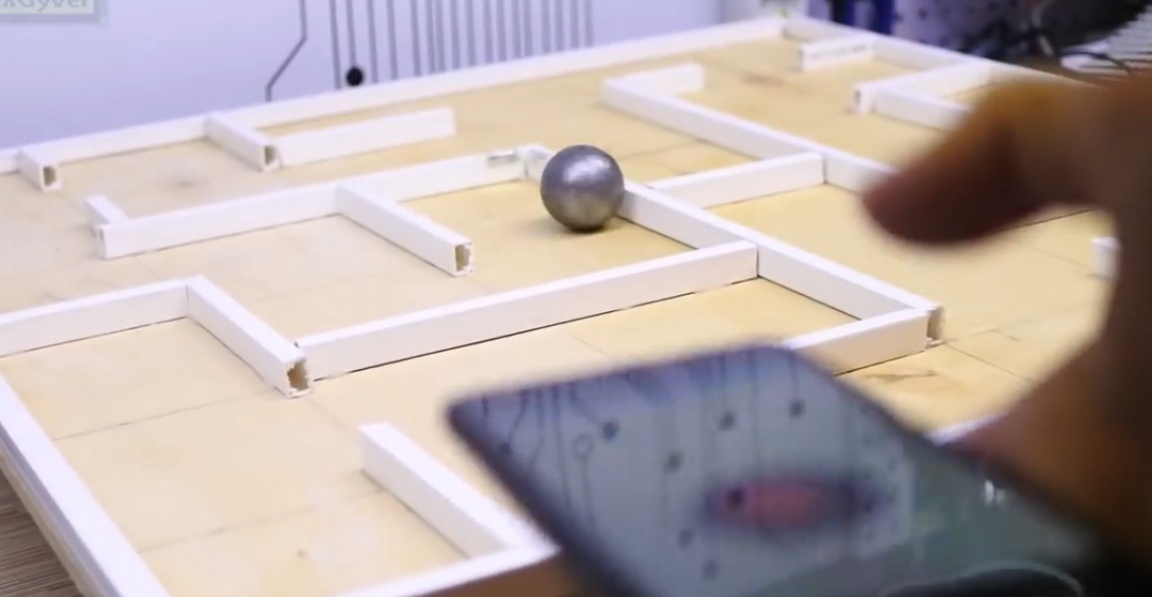
Les parets del laberint estan construïdes a partir d’un canal de cable de 10 × 15 mm. Va trigar 2,5m.

Aquesta vegada el laberint estarà sense forats, perquè el passarem no per complexitat, sinó per una estona. El laberint té un munt de butxaques en què la pilota volarà per inèrcia en intentar volar ràpidament pel lloc; serà interessant. Fem el marcador.
L’autor va cometre un petit error i va marcar el camp en 6 parts, i va dibuixar un laberint en una quadrícula de 5 per 5. Així que vaig haver de construir un laberint nou i més interessant, tot igual, 6 per 6.
Vam construir i finalment construir! Provem de passar-ho en mode manual.
Sí, és molt senzill, però serà difícil quan s’intenti treure-ho el més ràpidament possible quan opera des d’un telèfon intel·ligent. Realitzarem la fixació dels eixos, que són els cargols M4, a partir d’una peça de fusta.
Els eixos mateixos es muntaran aquí a aquestes cantonades.
Posem tot exactament al centre del camp i recollim. A la part inferior petita quadrada de contraplacat, fixarem amb cargols i femelles. Fixem els servos en cola calenta.
Sota els balancins que cal fer ranures, hi haurà un mecanisme al voltant. Comprovem.

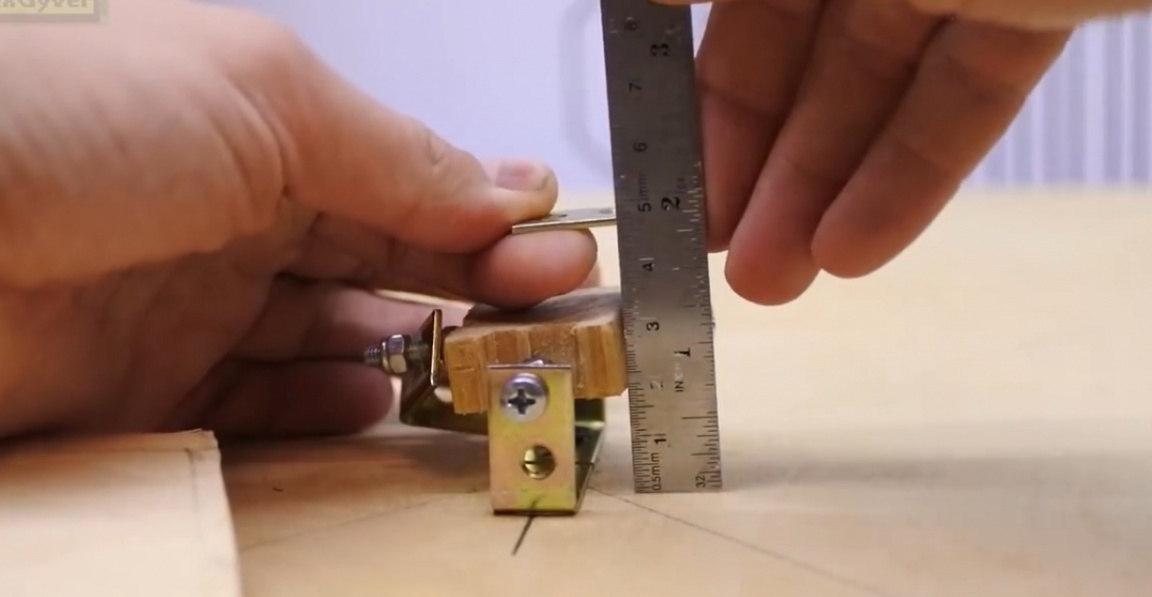
Farem una barra de connexió a partir d’un clip de mida XXL. Doblegueu suaument el clip de paper al voltant del balancí, en la mesura del possible, en angle recte, de manera que res no interfereixi amb la seva rotació. Mesurem l’alçada fins a la peça inferior de contraplacat i doblegem a la mateixa alçada.


A continuació, fem peces afilades en forma d’u per unir la biela al camp i martellar-la.

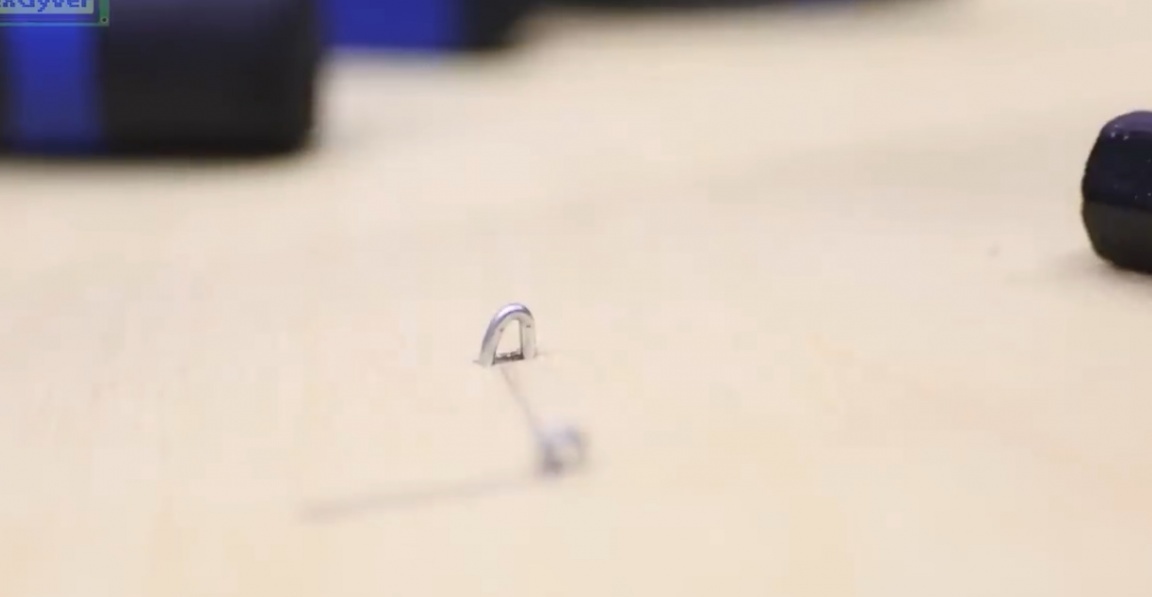
Recopilem i comprovem.
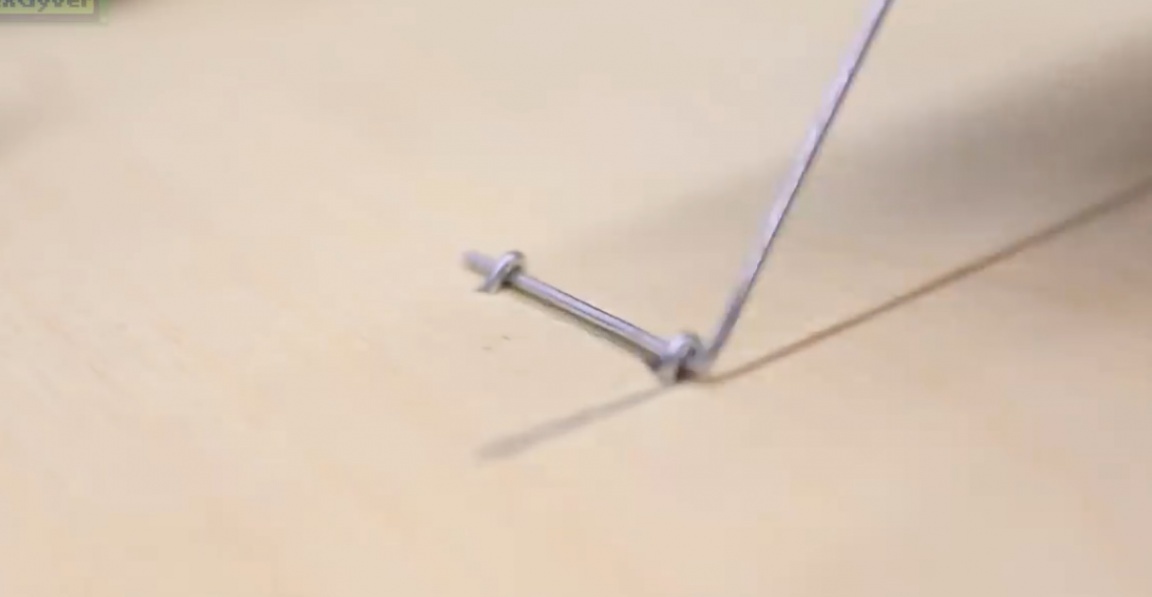


Genial! Tot gira lliurement. Resta unir les potes d’alguns restes de fusta, de manera que el mecanisme no es recolzi al terra.
Estem connectats al powerbank i pots jugar. Provem de passar pel laberint.

És molt més difícil fer-ho des del telèfon que en mode manual. L’autor ha recollit gairebé totes les seves trampes que passen temps a passar.
Llavors l’autor va pensar i va decidir: per què no fer un temporitzador automàtic. La bola és metàl·lica, deixa-la tancar per si sola 2 contactes que Arduino interrogarà com a botó. Necessitem un botó al començament i un al final. Marquem els llocs tocats per la pilota.


A continuació, necessitem paper. Colla els trossos de paper de paper perquè la bola els pugui tancar.

Després de completar la sol·licitud ràpidament, l’autor va rebre tal cosa. Quan la pilota toca l’angle d’inici, el temporitzador es reinicia i s’inicia. Quan toqueu la meta, el temporitzador s’atura.
Així, podeu esbrinar el pas del laberint. Però una capa de paper no era suficient, és millor posar molles al seu lloc. Qui ho farà? Millor posa les molles. En realitat, avui hem resultat ser una joguina nostàlgica en una versió material feta de contraplacat, un canal de cable i no sense l’ajuda d’alta tecnologia.
Gràcies per la vostra atenció. Ens veiem aviat!
Vídeo: