
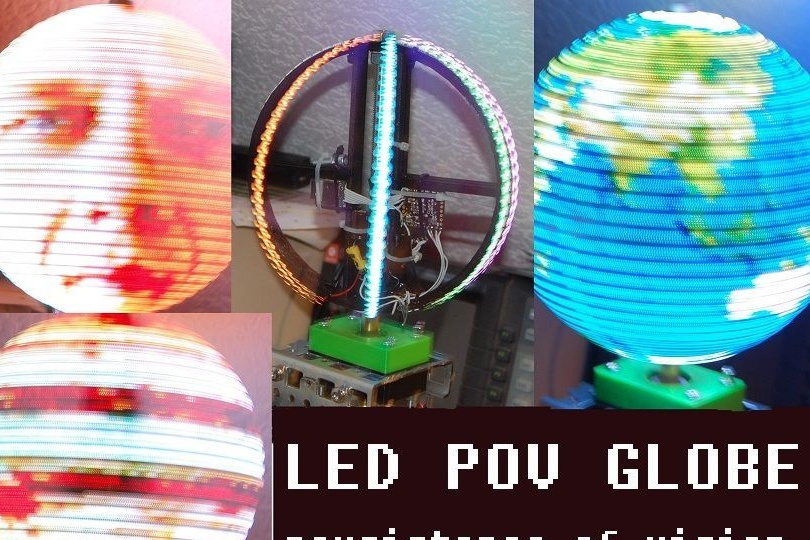
Aquest tutorial tracta sobre com crear un globus POV amb menys. electrònica components que altres dispositius similars. Mitjançant l’ús de LED RGB amb un controlador integrat APA102. D’aquesta manera us estalviareu la soldadura de nombrosos cables. Podeu llegir més informació sobre ells. Aquests leds no necessiten un controlador addicional. Es connecten directament al microcontrolador de dues maneres. Això permet canviar els LED molt ràpidament. Per obtenir una imatge estable, la sincronització SPI té una freqüència de 10 MHz. Un altre avantatge d’aquest disseny és l’ús d’una targeta flash, que emmagatzema la imatge en format BMP.
1 Material necessari

Per a l’eix del món necessitareu:

1. Estudi amb fil M8 i una longitud de 250 mm
2. Nou M8
3. Funda de llautó de 10 mm i 100 mm de llarg
4. Rentadores de plàstic de 8 mm de 2 peces (fitxers STL inclosos)
5. acoblament per a aquells que utilitzaran el motor pas a pas NEMA 17
Per alimentar l'anell LED a l'eix, necessitareu
1. rodament de boles 6300 (10x35x11)
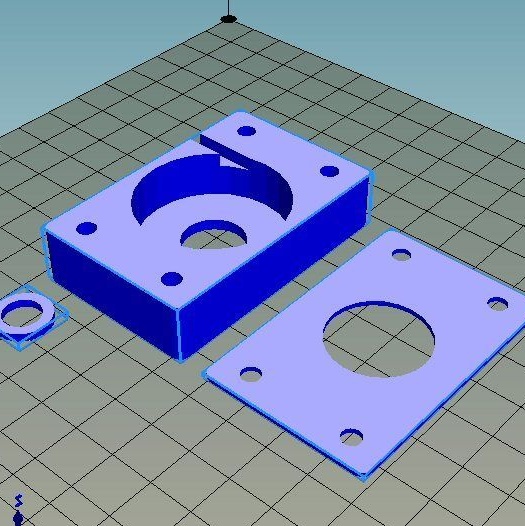
2. dos brackets per a coixinets. Imprès en una impressora 3d o feta de fusta.
3. Quatre cargols M4x40 amb femelles
4. Consells sobre cables 2 unitats 8mm
5. amb un diàmetre de l’eix de 5mm
6. 4 cargols M4 per al muntatge del motor
7. potser un fan.
També podeu utilitzar qualsevol motor amb el parell i el control de velocitat adequats. El motor utilitzat en aquest disseny té un parell màxim a un corrent de 50A, però el consum màxim de corrent durant el funcionament és només de 18A.
Per controlar el conductor del servomotor, utilitzeu
1.
2. dos botons
Alimentació 12V per a motor i 5V per a LEDs. Com a font d’alimentació, podeu utilitzar l’antiga unitat des de l’ordinador. Podeu comprar una font d’alimentació de 12v / 5A i connectar-vos a ella
Per a l'anell LED necessitareu:
1.664 LEDs 2 tires de 32 peces
2. Capacitor 1000 µF 10V
3. Sensor i imant de sala
4. La resistència de tracció 1k, 10k
5. L’anell s’ha d’imprimir en una impressora 3D o bé utilitzar un tros de tub de PVC
6. Llaços de plàstic (100 mm)
7. Una bona cola que s’uneix i no es volen a part a 2500 rpm
També necessitareu un Microcontrolador d'hèlix Paral·lelax. O en podeu fer servir un altre el model controlador, però, a més, assumir una tarifa per. Aquest controlador està programat i parpellejat de forma tan senzilla com Arduino. Necessiteu un adaptador USB-TTL per programar els dos controladors.
Cos.
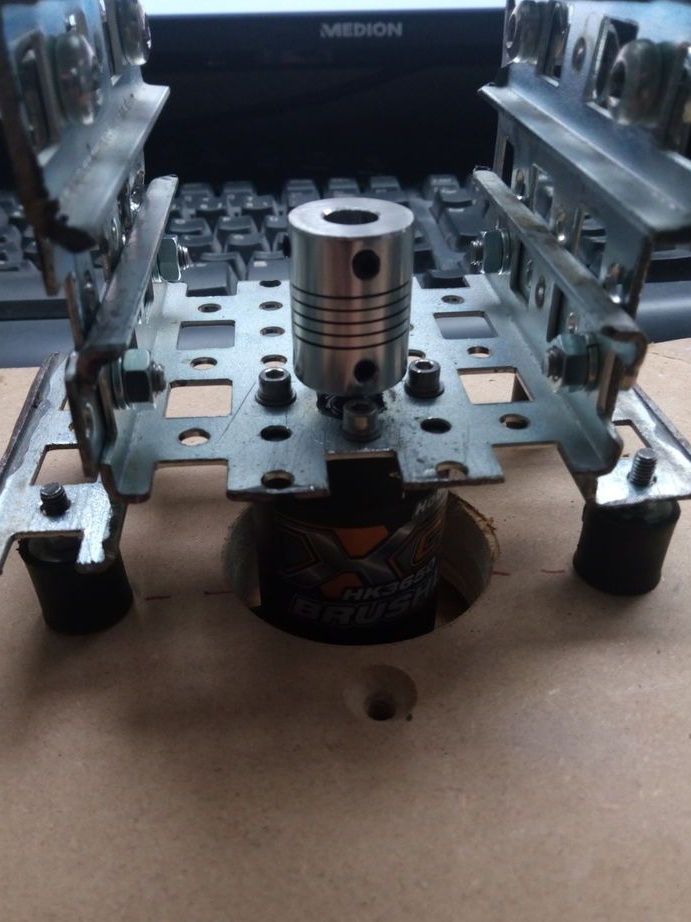
Habitatge per a casolans Podeu prendre qualsevol cosa suficient. El més important és que es poden fixar de forma segura el motor i els coixinets.
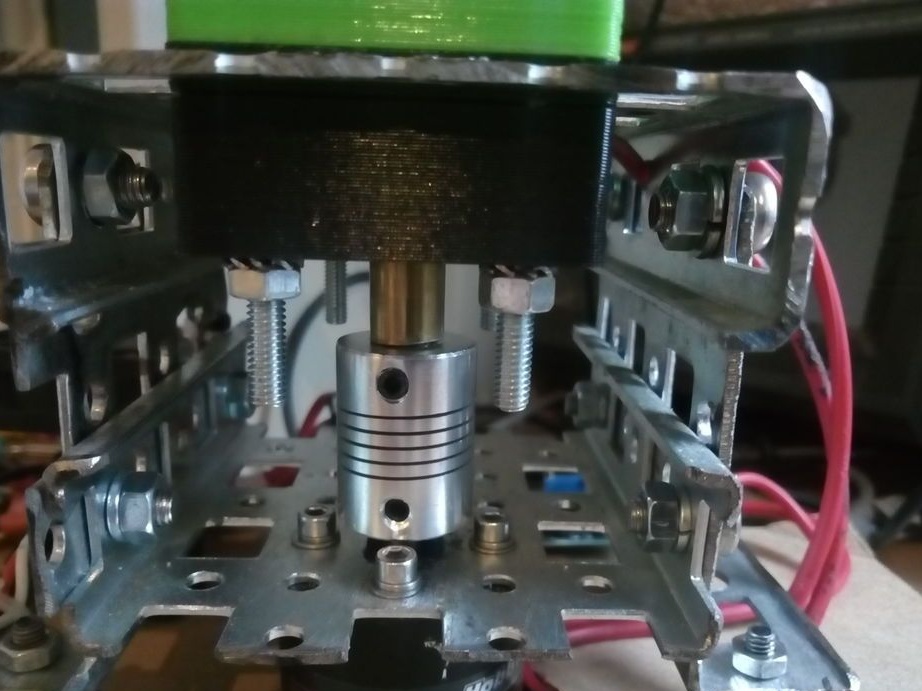
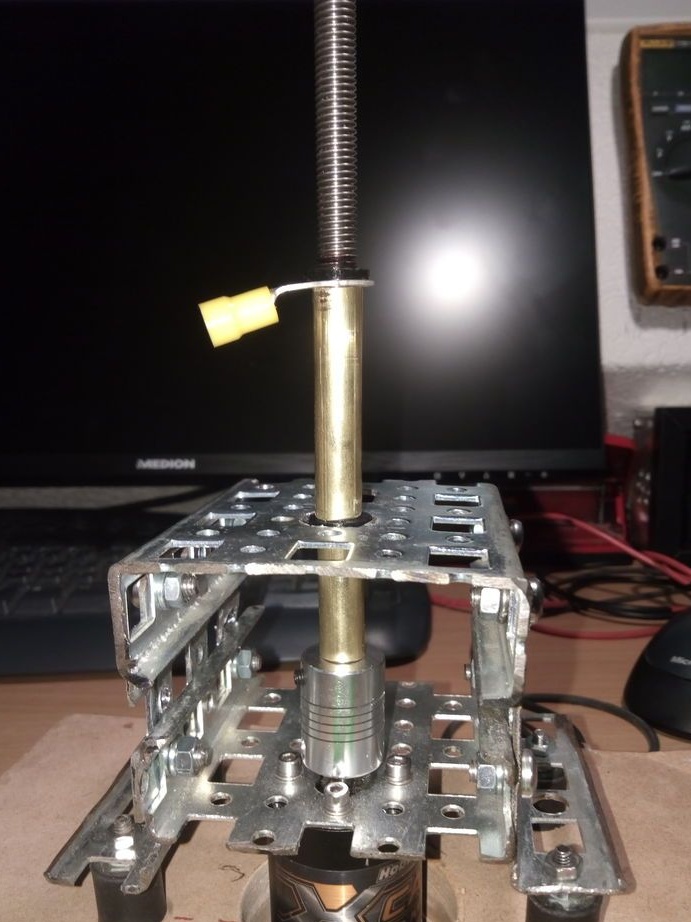
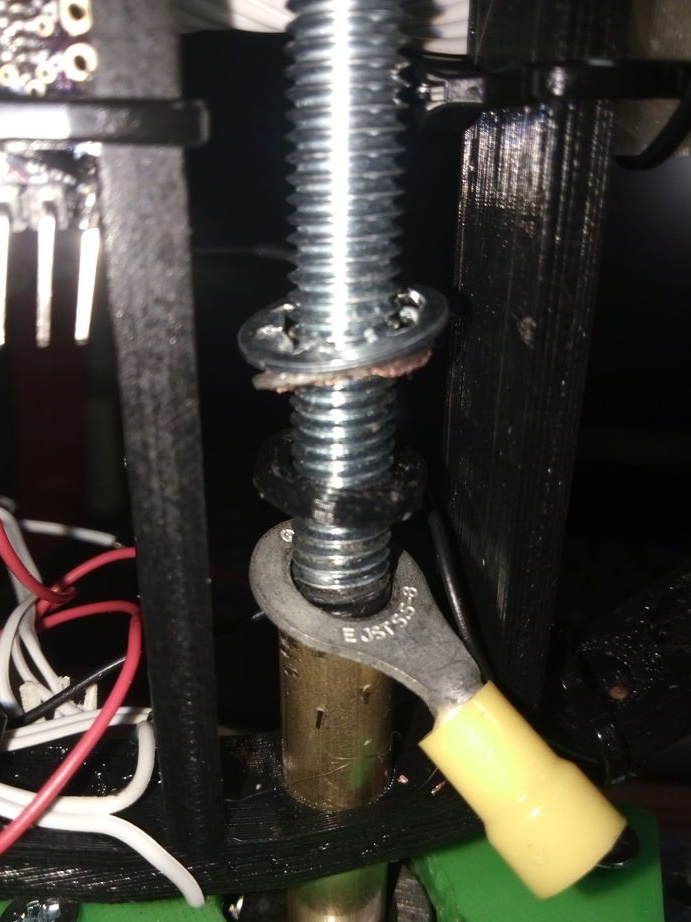
Per a l’eix motriu s’utilitza un pivot de 250 mm de llarg.La longitud de les mates de llautó és de 50 i 30 mm. Depèn de la mida de l'anell i de la longitud de l'eix. La màniga superior i més llarga ha d’estar aïllada de la perilla, ja que s’utilitza per subministrar més energia als LED. Per fer-ho, emboliqueu la cinta elèctrica en un punxó o utilitzeu una contracció tèrmica, també es necessitaran dues rentadores de plàstic. S'haurà de perforar la funda fins a 8,5-9 mm, en cas contrari, no encaixa. L’altra funda junt amb la vareta formen un contacte negatiu.
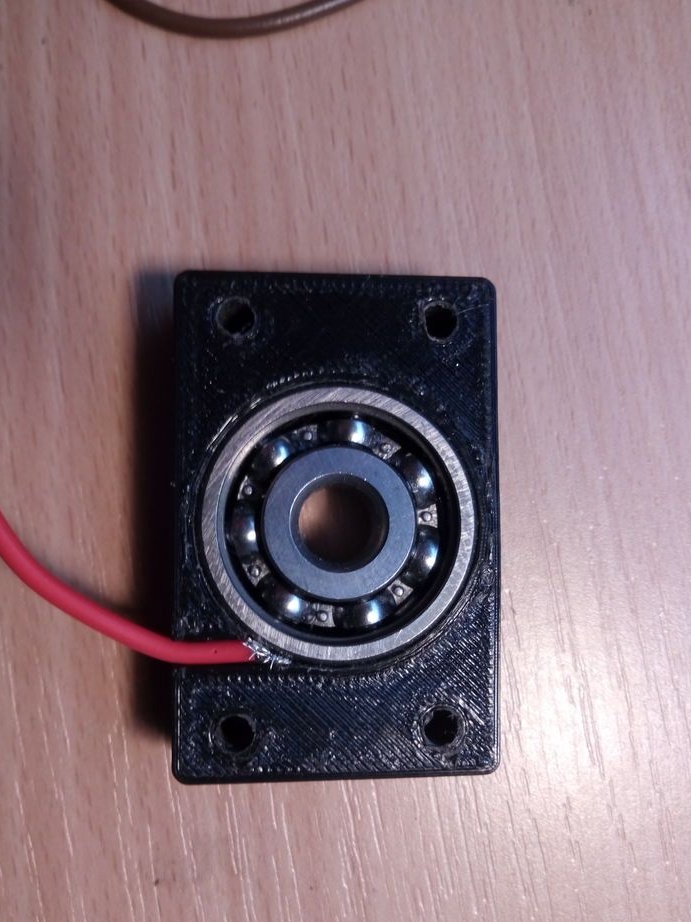
La potència mínima es col·loca en una ranura especial i es pressiona contra el coixinet del suport, que es pot imprimir en una impressora. Fitxer STL entre claudàtors.


Ara necessiteu connectar el motor elèctric, tal com es mostra al diagrama.
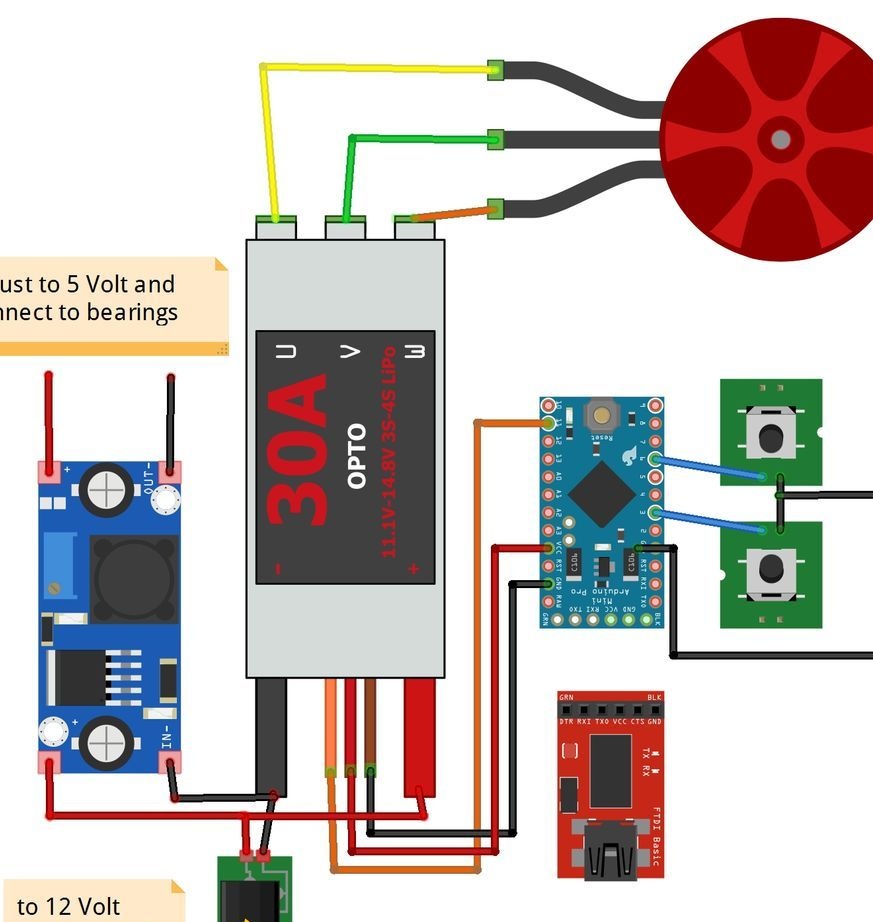
Per ajustar la velocitat s’utilitzen dos botons del diagrama. Quan enceneu l’alimentació, l’ESC rebrà un valor de 500 μs. Premeu un dels botons per engegar el motor. L’esbós portarà el valor “StartPos = 625”. Més endavant, quan ajusteu la velocitat, es pot canviar aquest valor. Premeu el botó durant dos segons i el motor s’hauria d’aturar.
Muntatge de l'estructura del nucli.
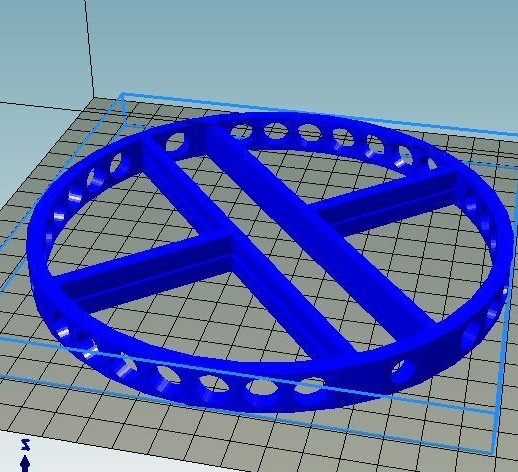

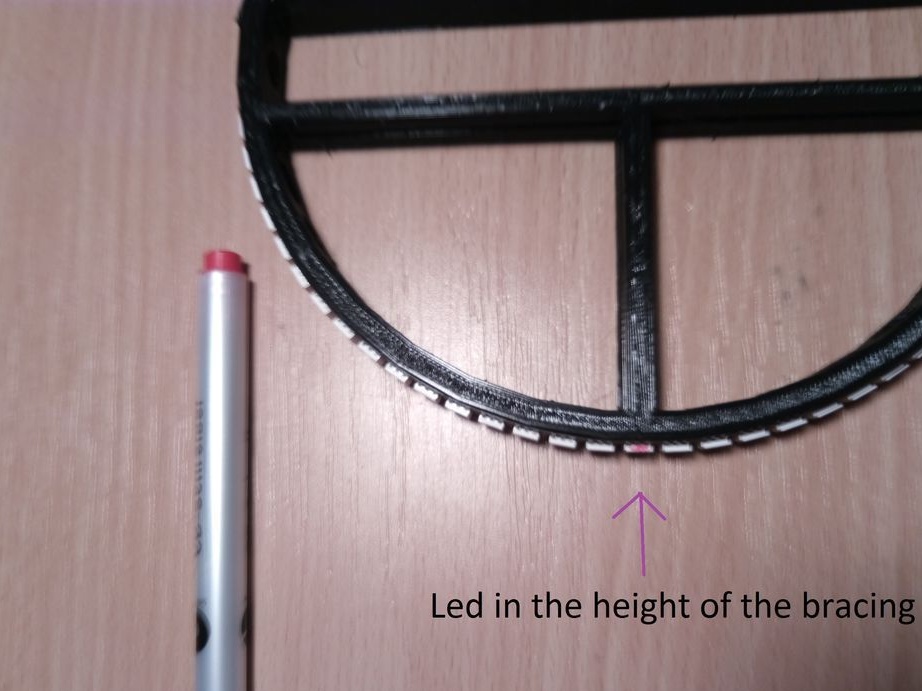
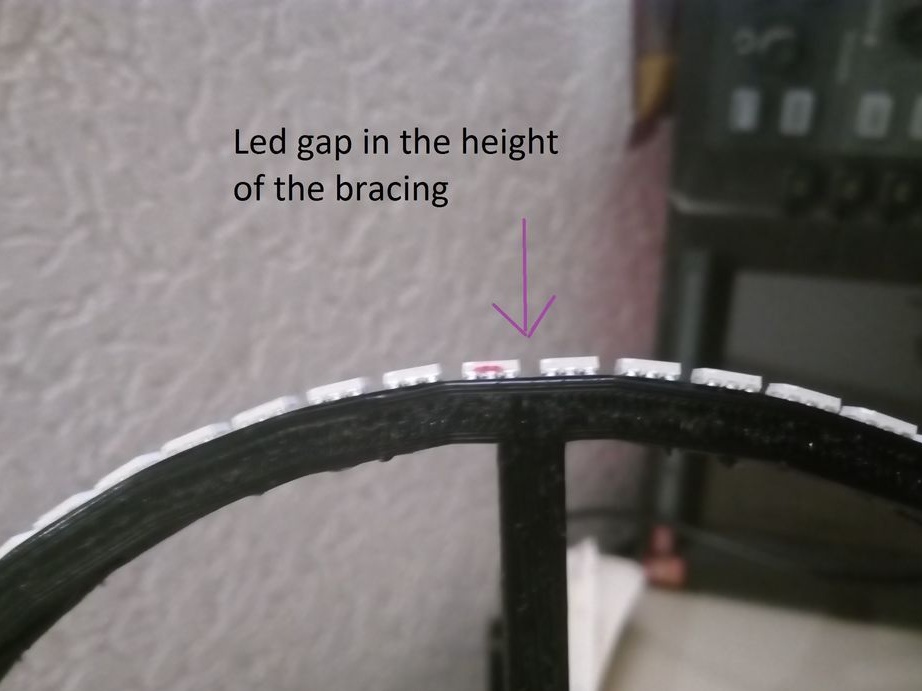


Per fer-ho, imprimiu l’anell del fitxer adjunt. L’autor hi va fer molts forats per tal de reduir pes. Podeu utilitzar una peça de tub de PVC. Es tallen dues tires de 32 LEDs. Dues tires de LED formen línies parelles i imparelles. Organitzar les cintes de manera que els LED d’una banda estiguin situats entre els LED de l’altra, però al revers. Després de fixar la cinta, podeu connectar els LED de la placa de control. I després cal equilibrar tot el muntatge.
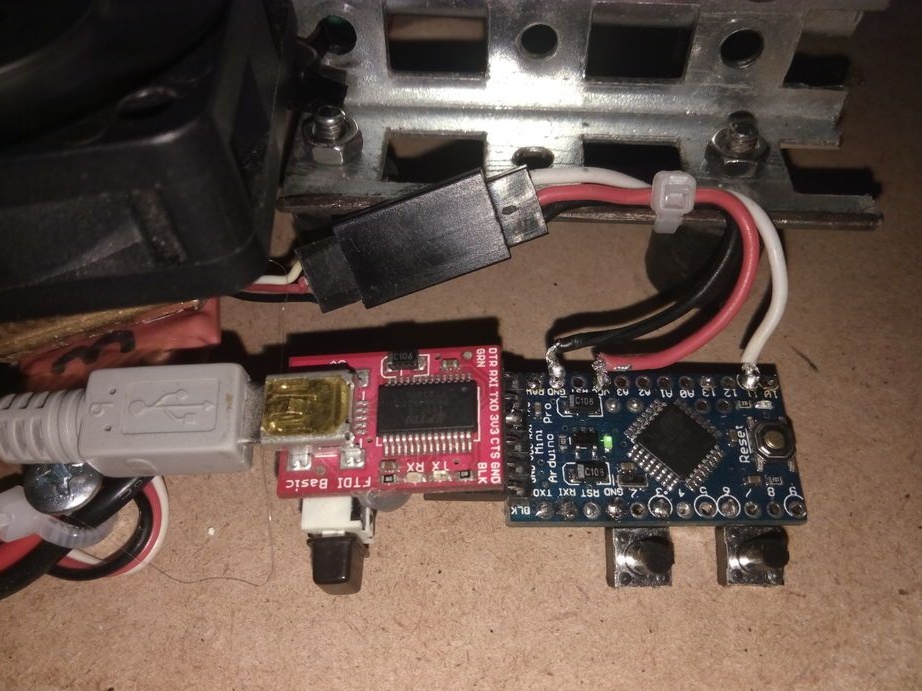
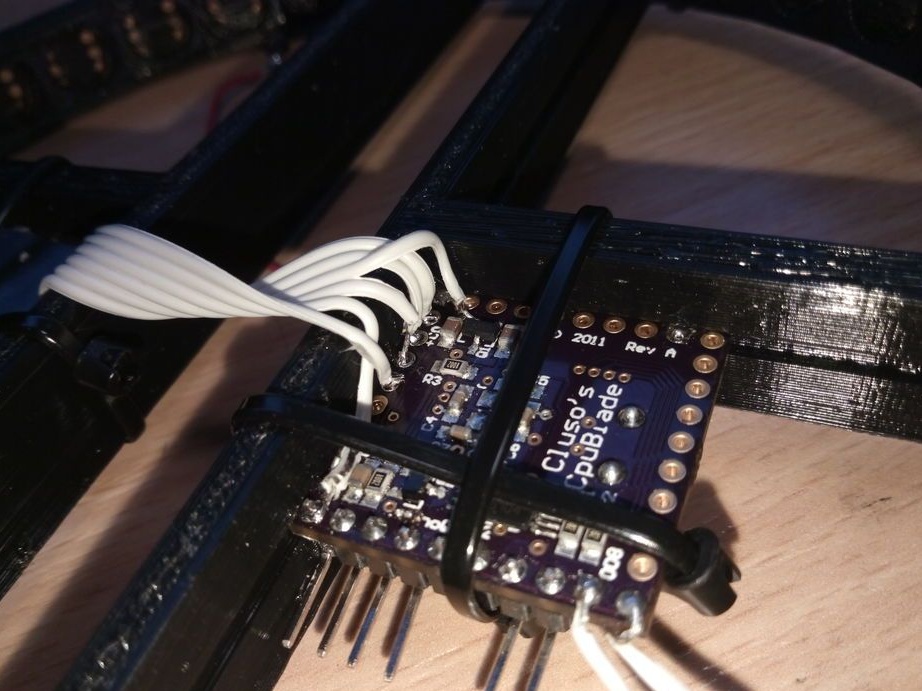
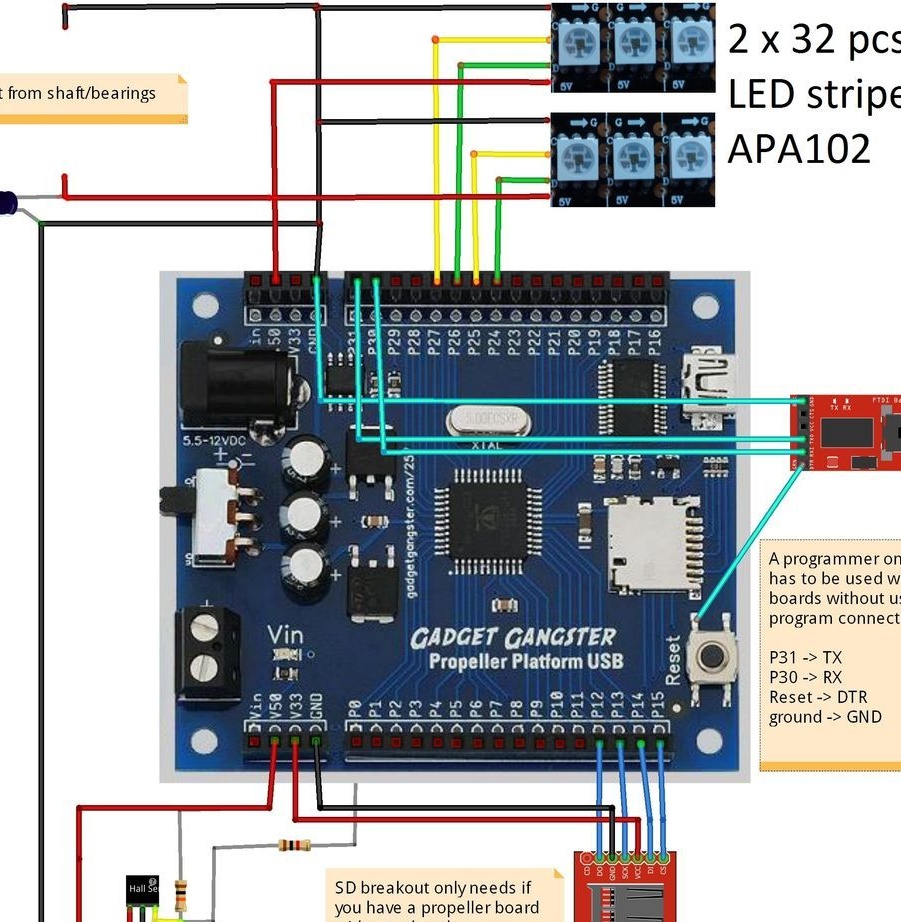
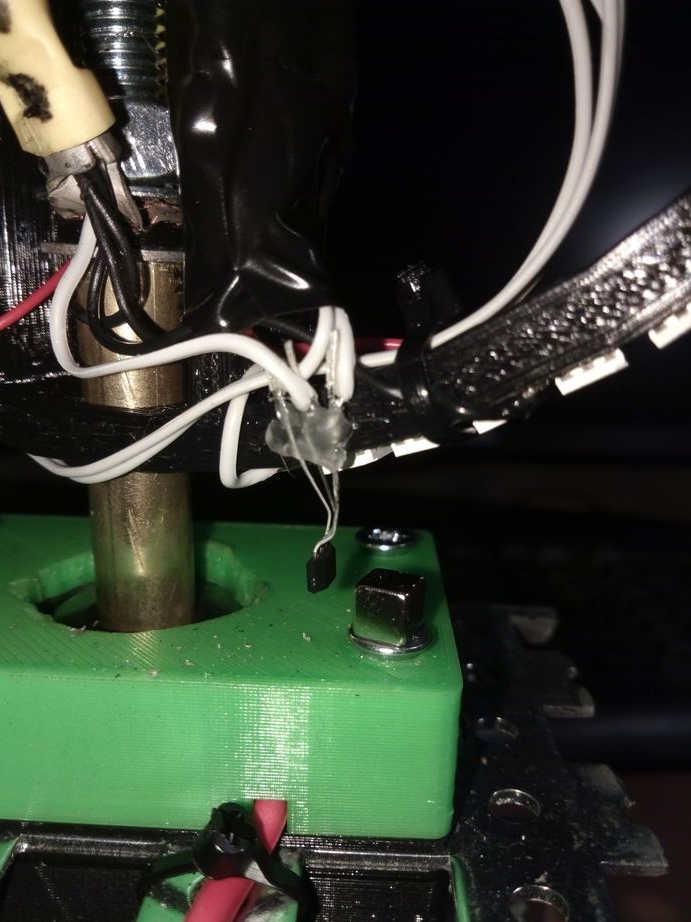
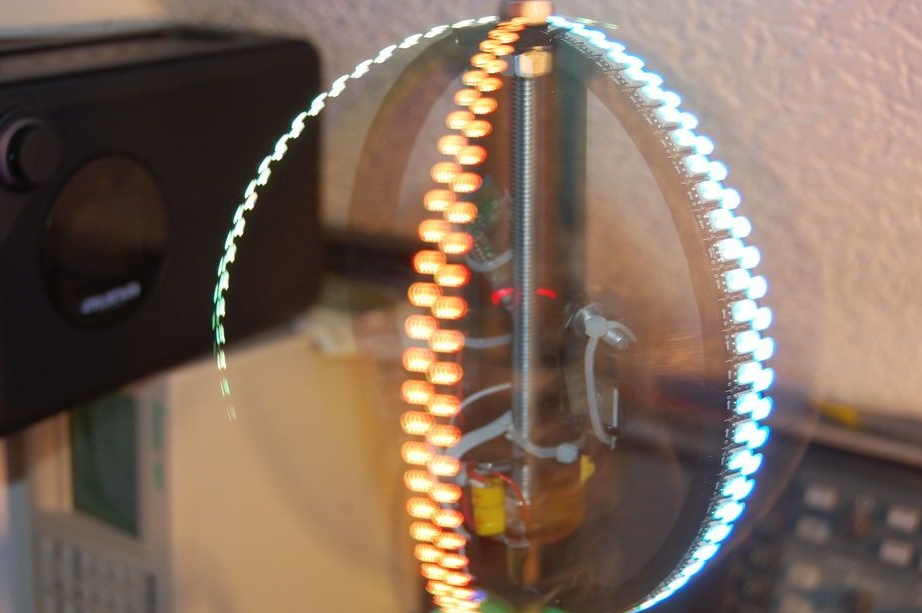
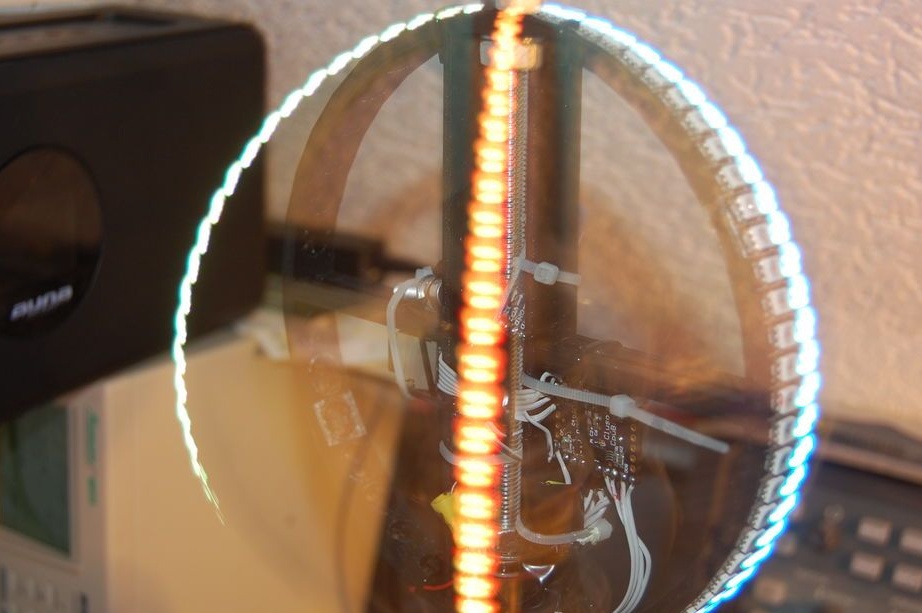
Les fotos següents mostren com connectar tots els components del dispositiu. La foto també mostra el sensor de la sala instal·lat amb un imant.
Per programar el microcontrolador de l’hèlix Parallax, necessiteu
NO connecteu l'equip a un port USB o sèrie fins que no hagueu instal·lat el programari. Podeu trobar més detalls sobre la càrrega de firmware a Parallax
L'autor utilitza una placa MCU més antiga i, per tant, menys econòmica, pel que fa al consum d'energia, perquè no pot trobar noves biblioteques en les noves targetes de control.
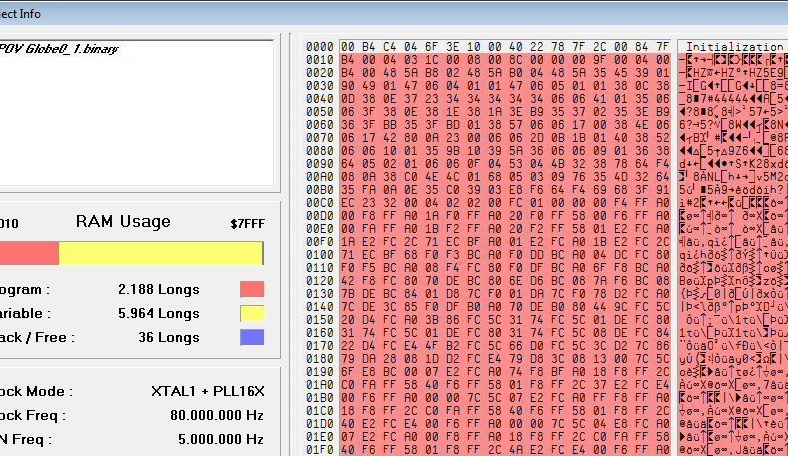
Després de recollir-lo i connectar-ho tot, heu de programar el controlador. L’autor ho fa amb ajuda. Arxius amb firmware a l'arxiu.
Ara podeu provar d’iniciar el dispositiu. Des del principi, copia la imatge de la prova a la targeta SD i enganxa-la a la ranura.
• Si gireu l’anell a mà, els LEDs han de parpellejar cada vegada que el sensor de la sala passa l’imant
• Encendre el motor. Per augmentar la velocitat amb els botons, cal assegurar-se que els LED s’encenen com es mostra a les 2 fotos
• Connecteu el terminal Arduino al controlador del motor.
• Recordeu el valor mostrat.
• Atureu el motor
• Escriviu el valor emmagatzemat prèviament a la variable "startPos"esbós POV_MotorControl
• Programa de nou l’Arduino.
La propera vegada que el motor arrenqui immediatament a la velocitat adequada. Ara podeu "omplir" al mapa qualsevol imatge. Per fer-ho, canvieu la mida de la imatge per 120 x 64 píxels, gireu la imatge en sentit antihorari per 90 graus i emmiralleu-la verticalment. Disminuïu la brillantor de la imatge, ja que els LED són molt brillants. Per fer-ho, és millor utilitzar la correcció gamma amb un coeficient de 0,45.
Desa la imatge com a BPM de 24 bits sense compressió. Després de totes les manipulacions, el fitxer de sortida serà de la mida 23094 byte.



